Изобретение относится к оптическому приборостроению и может быть использовано в устройствах, предназначенных для внешнетраекторных измерений в космической геодезии и полигонных измерениях.
Рост количества искусственных объектов в околоземном пространстве обуславливает актуальность задач, связанных с их поиском, распознаванием, сопровождением и внешнетраекторными измерениями. Также актуальной является задача выполнения внешнетраекторных измерений летательных аппаратов, летящих с высокой скоростью на небольшой высоте. Для слежения за подобными объектами скорости наведения поворотных частей наземных измерительных средств должны быть не менее 30o/с, при этом должна обеспечиваться точность наведения и слежения порядка 1-3 угловых секунд. Обеспечение подобных целевых характеристик требует создания измерительных средств, имеющих небольшие массогабаритные характеристики, моменты инерции и моменты сопротивления.
В системах внешнетраекторных измерений применяются, в частности, пеленгационный и дальномерно-пеленгационный методы определения местоположения объекта (Плотников В.С. Геодезические приборы: Учебник для вузов. - М.: Недра, 1987, с. 330-349). На пеленгационном методе основаны, например, кинотеодолитные измерения. Кинотеодолиты по своей принципиальной схеме наиболее близки к геодезическим приборам и широко применяются при полигонных траекторных измерениях. Основными достоинствами пеленгационного метода являются относительно высокая точность при проведении полигонных измерений, простота вторичной обработки результатов и возможность получения результатов в реальном масштабе времени. Дальномерно-пеленгационный метод предусматривает измерение с одного измерительного поста наклонной дальности до объекта и двух направлений азимута и угла места. Аппаратура, основанная на этом методе, по схеме представляет собой оптический локатор. Достоинствами дальномерно-пеленгационного метода являются достаточно высокая точность, постоянство точности независимо от расположения наблюдаемого объекта и измерительного поста, более простое решение вопросов синхронизации моментов измерений при одном измерительном посте, возможность получения результатов в реальном масштабе времени.
Известен дальномер по патенту RU N 2010158 (МПК5 G 01 С 3/00, 1992 г.). Известное устройство содержит телевизионный датчик, выход которого соединен со входом видеоконтрольного устройства, подвижную платформу с приводом, установленную с возможностью линейного перемещения на станине с приводом, блок управления приводом подвижной платформы, выход которого соединен со входом привода подвижной платформы, блок управления приводом станины, выход которого соединен со входом привода станины, и волоконно-оптический жгут. При этом телевизионный датчик жестко связан с подвижной платформой, имеющей жесткую связь с приводом подвижной платформы и со станиной. Вход привода подвижной платформы соединен с выходом управления приводом подвижной платформы. Вход привода станины соединен с выходом блока управления приводом станины. Выход телевизионного датчика соединен со входом видеоконтрольного устройства, оптически связанного через волоконно-оптический жгут с другим телевизионным датчиком. Объект, до которого надо измерить расстояние, устанавливается в поле зрения телевизионного датчика, находящегося на подвижной платформе, двигающейся вдоль станины. Станина поворачивается вместе с упомянутым телевизионным датчиком по азимуту и углу места с помощью привода станины. Отображаемый объект фиксируется на видеоконтрольном устройстве, к центру экрана которого подведен волоконно-оптический жгут. Подвижная платформа вместе с телевизионным датчиком перемещается с помощью привода подвижной платформы, управляемого блоком управления приводом подвижной платформы.
Известное устройство может быть использовано для определения дальности до неподвижных или малосмещающихся объектов, например на удаленности 20-50 км. Для определения дальности до движущегося объекта необходимо определить дальность до неподвижного объекта, находящегося вблизи движущегося. Устройство может быть выполнено переносным, а также может быть размещено на малогабаритном транспортном средстве.
Однако известное устройство имеет ограниченные функциональные возможности.
Известно оптическое устройство по патенту RU 2137167 (МПК6 G 02 В 23/00, 23/16, 1997 г.), имеющее опорно-поворотное устройство (ОПУ) с альт-азимутальной монтировкой. Известное оптическое устройство содержит основание, вилку, включающую в себя платформу с двумя стойками, установленную в основании с возможностью поворота вокруг вертикальной (азимутальной) оси, средник с оптическим блоком, установленный в вилке с возможностью поворота вокруг горизонтальной (угломестной) оси, узлы вращения и приводы вращения относительно упомянутых осей, устройство регулировки вертикальности оси вращения вилки, последовательно установленные отражающие элементы и оптическую аппаратуру. Оптический блок включает в себя несколько оптико-электронных устройств, обеспечивающих прием и передачу оптического сигнала на различных каналах, например телевизионных, инфракрасных, лазерных, а также преобразование оптического сигнала в удобную форму. Последовательно установленные отражающие элементы образуют два лучевода с общим начальным участком, ось которого совмещена с вертикальной осью вращения. При этом ось предпоследнего участка каждого лучевода совмещена с горизонтальной осью вращения. Каждый привод вращения содержит моментный двигатель, включающий статор и ротор. Наведение оптического устройства по упомянутым осям обеспечивается моментными двигателями, датчиками положения по углу и датчиками скорости. Каждый из последних выполнен в виде единого агрегата с соответствующим моментным двигателем. Узлы вращения средника с оптическим блоком выполнены в виде прикрепленных к среднику трубчатых полуосей, входящих внутрь соответствующих подшипниковых опор, закрепленных на стойках вилки. Одна из трубчатых полуосей выполнена с образованием свободного конца, который с помощью разъемного соединения соединен с ротором моментного двигателя, статор которого с помощью переднего фланца консольно соединен с соответствующей стойкой вилки. Узел вращения вилки относительно вертикальной оси выполнен в виде смонтированных на основании оптического устройства двух концентричных подшипниковых опор. Центральная из последних установлена на упомянутом основании с возможностью ограниченного перемещения и поворота относительно упомянутой вертикальной оси. В варианте выполнения это обеспечивается посредством закрепленной на основании оптического устройства кольцевой мембраны. Вместо кольцевой мембраны могут быть применены радиально расположенные упругие элементы. Вилка в центральной подшипниковой опоре установлена посредством трубчатой цапфы, свободный конец которой через переходник с помощью разъемного соединения соединен с ротором другого моментного двигателя, статор которого соединен с основанием оптического устройства. Через трубчатую цапфу пропущен кабелепереход с вилки на основание. Кабелепереход выполнен с возможностью прохождения оптического луча вдоль вертикальной оси вращения к оптической аппаратуре, размещенной на основании оптического устройства. Последняя представляет собой квантово-оптическую приемопередающую аппаратуру, обеспечивающую возможность работы оптического устройства одновременно в режиме приема и передачи. Размещение этой аппаратура на неподвижном основании наряду с обеспечением уменьшения массогабаритных характеристик поворотных частей оптического устройства облегчает ее обслуживание при эксплуатации. Общий начальный участок упомянутых лучеводов пропущен через узел вращения вилки относительно вертикальной оси. Предпоследний участок каждого лучевода пропущен через соответствующий узел вращения средника с оптическим блоком относительно горизонтальной оси. Средник с оптическим блоком установлен с возможностью регулировки его положения относительно горизонтальной оси вращения. Между основанием оптического устройства и платформой вилки, а также между вилкой и одной трубчатой полуосью установлены устройства фиксации их взаимного положения.
Известное оптическое устройство является многофункциональным и обеспечивает слежение за быстродвижущимися объектами. Однако оно имеет сравнительно большие массогабаритные характеристики, что связано, в частности, со схемно-компоновочным решением, положенным в основу его конструкции.
Также известно оптическое устройство по патенту RU 2119681 (МПК6 G 02 В 23/00, 1997 г. ), имеющее опорно-поворотное устройство с горизонтальной (альт-альт) монтировкой. Известное оптическое устройство содержит взаимно параллельные оптические блоки, смонтированные на опорно-поворотном устройстве со взаимно ортогональными осями вращения, выполненное в виде установленного в опорах, закрепленных на основании, первого полого вала, геометрическая ось которого неподвижна, на котором в соосных опорах с возможностью вращения относительно оси, ортогональной упомянутой, установлены оптические блоки, приводы вращения относительно упомянутых осей и зеркало, установленное с возможностью регулировки его положения внутри корпуса первого вала. В варианте выполнения устройство включает в себя два оптических блока. Первый оптический блок включает в себя несколько оптико-электронных устройств, обеспечивающих прием и передачу оптического сигнала на различных каналах, например телевизионных, инфракрасных, лазерных, а также преобразование оптического сигнала в удобную форму. Другой оптический блок содержит оптико-электронные устройства, обеспечивающие только прием оптического сигнала. Оптические блоки жестко закреплены на едином полом валу, установленном в упомянутых соосных опорах, причем второй вал выполнен с вырезом с возможностью размещения в нем зеркала, установленного на опоре, консольно закрепленной внутри корпуса первого вала. Последняя выполнена в виде раструба или усеченной стержневой пирамиды с возможностью прохождения оптического луча вдоль ее оси. Зеркало отражает направленный вдоль оси второго полого вала световой пучок от первого оптического блока и через вырез в корпусе второго полого вала направляет этот световой пучок вдоль оси первого полого вала к неподвижной оптико-электронной аппаратуре. Последняя представляет собой объектив, а в случае направления в сторону наблюдаемого объекта светового луча большой мощности - источник световой энергии. Каждый привод вращения содержит цементный двигатель, включающий в себя статор и ротор, соединенный с валом соответствующей оси вращения. Каждый вал снабжен датчиком положения по углу и датчиком скорости. При этом второй вал выполнен с образованием свободного конца, который через переходник с помощью разъемного соединения соединен с ротором моментного двигателя, статор которого закреплен на корпусе первого вала. Корпус первого вала выполнен с переходником, связанным с помощью разъемного соединения с ротором другого моментного двигателя, статор которого закреплен на опоре первого вала. Между основанием опорно-поворотного устройства и первым валом, а также между валами установлены устройства фиксации их взаимного положения. Вместе с этим опорно-поворотное устройство снабжено кабелепереходом с основания на первый полый вал, а также кабелепереходом с первого полого вала на второй полый вал. Одна из опор первого вала снабжена средством для компенсации температурных деформаций опорно-поворотного устройства и основания.
Известное оптическое устройство является многофункциональным и обеспечивает слежение за быстродвижущимися объектами. При этом устройство позволяет повысить точность наведения, в частности, благодаря paзмещению моментных двигателей приводов наведения, а также датчиков обратной связи положения валов по углу и датчиков обратной связи скорости валов непосредственно на исполнительных осях и благодаря исключению отклонения оптических осей вследствие различия температурных деформаций опорно-поворотного устройства и основания.
Однако известное оптическое устройство имеет сравнительно большие массогабаритные характеристики и не является транспортабельным. Кроме того, схемно-компоновочное решение известного устройства не предполагает расширения его функциональных возможностей, например, путем смены оптических блоков.
Наиболее близким по совокупности существенных признаков с заявленным изобретением является оптическое устройство для автоматического измерения расстояния между двумя объектами по патенту RU 12116621 (МПК6 G 01 С 3/10, G 03 В 13/20, 1995 г.). Известное оптическое устройство содержит устанавливаемое на основании опорно-поворотное устройство с альт-азимутальной монтировкой, включающее вилку с двумя опорами (стойками) и штырем, установленную в другом основании (станине) с возможностью поворота вокруг азимутальной оси, узлы вращения и приводы вращения вокруг азимутальной и угломестной осей, кинематически связанные с датчиками угла поворота относительно упомянутых осей, оптико-электронную аппаратуру и многочастотный излучатель. Последний выполнен с возможностью установки на одном из двух объектов, расстояние между которыми измеряется. Известное устройство относится к оптическим дальномерам геометрического типа с базисом при инструменте.
Однако подобные оптические дальномеры геометрического типа обеспечивают достижение невысокой точности измерений и имеют небольшие пределы измеряемых ими расстояний. К недостаткам известного устройства также можно отнести ограниченные функциональные возможности и наличие в нем кинематических цепей между валами осей наведения и соответствующими датчиками угла поворота относительно данных осей, что вносит значительные погрешности в точность наведения устройства. Кроме того, в известном устройстве приводы вращения закреплены на выступающих из опор (узлов вращения) концах валов, что не обеспечивает достаточной жесткости конструкции.
Задачей настоящего изобретения является создание компактного многофункционального транспортабельного высокоточного оптического устройства для наблюдения за летающими объектами, обеспечивающего возможность его преобразования соответственно используемому методу определения местоположения летающего объекта и целям наблюдения за объектом.
Эта задача решается благодаря тому, что оптическое устройство, содержащее установленное на основании опорно-поворотное устройство, включающее вилку с двумя стойками и штырем, установленную в станине с возможностью поворота вокруг азимутальной оси, первый оптический блок, установленный в вилке с возможностью поворота вокруг угломестной оси, узлы вращения и приводы вращения вокруг азимутальной и угломестной осей с датчиками угла поворота относительно упомянутых осей, оптико-электронную аппаратуру и излучатель, согласно изобретению снабжено оптико-механическим блоком, выполненным с возможностью установки между станиной опорно-поворотного устройства и основанием, вторым оптическим блоком и последовательно установленными отражающими элементами, образующими лучевод с возможностью прохождения оптического луча от первого оптического блока к оптико-механическому блоку. Лучевод имеет участки, совмещенные соответственно с азимутальной и угломестной осями вращения. Упомянутый излучатель размещен в оптико-механическом блоке. На стойках вилки в подшипниковых опорах установлен полый вал с возможностью поворота вокруг угломестной оси. Внутри полого вала выполнены кольцевые расточки заданных размеров, оси которых расположены каждая с заданными эксцентриситетом относительно оси вращения полого вала. К каждому из концов полого вала при помощи фланца разъемно присоединено по одному из упомянутых оптических блоков. При этом полый вал выполнен с вырезом с возможностью размещения в нем одного из упомянутых отражающих элементов, который установлен с возможностью регулировки его положения на опоре, закрепленной на штыре вилки. Штырь вилки выполнен с возможностью прохождения оптического луча вдоль азимутальной оси и установлен в двух разнесенных по высоте подшипниковых опорах. Каждый привод вращения содержит моментный двигатель, включающий в себя статор и ротор. Моментальные двигатели и датчики угла поворота установлены между подшипниковыми опорами соответствующих осей вращения опорно-поворотного устройства. Роторы моментальных двигателей и датчиков угла поворота закреплены соответственно на штыре вилки и на корпусе полого вала. Статоры моментальных двигателей и датчиков угла поворота закреплены соответственно на станине и консольно на соответствующей стойке вилки. Одна из подшипниковых опор каждой из осей вращения опорно-поворотного устройства снабжена средством для компенсации температурных деформаций. Такая конструкция оптического устройства с альт-азимутальной монтировкой с безредукторными приводами наведения, снабженными мементными двигателями и датчиками угла поворота, установленными непосредственно на валах осей наведения при выбранных люфтах в подшипниковых опорах, например, путем создания предварительных натягов, позволяет существенно повысить общую жесткость устройства и соответственно частотные характеристики монтировки до 30-35 Гц, а следовательно, и повысить точность наведения. Особенности выполнения вала угломестной оси позволяют повысить степень уравновешенности поворачивающихся относительно данной оси частей устройства, а следовательно, обеспечивают возможность снижения соответствующих момента инерции и момента сопротивления вращению, что в конечном итоге также обеспечивает повышение точности наведения и, кроме того, позволяет использовать для наведения по углу места двигатель меньшей мощности и, соответственно, габаритов. Благодаря тому что одна из подшипниковых опор каждой из осей вращения снабжена средством для компенсации температурных деформаций, исключается возможность заклинивания подшипников или резкого увеличения момента сопротивления вращению. Таким образом, обеспечивается стабильное наведение и слежение при работе оптического устройства. Наличие лучевода и оптико-механического блока, выполненного в виде отдельного модуля, обеспечивает приспособляемость оптического устройства для решения различных задач и позволяет существенно расширить его функциональные возможности. Установка оптико-механического блока между станиной опорно-поворотного устройства и основанием позволяет уменьшить массогабаритные характеристики поворотных частей монтировки, а следовательно, и моменты инерции, что обеспечивает возможность уменьшения деформативности поворотных частей как в статике, так и в динамике, и в конечном счете также обеспечивает повышение точности наведения оптического устройства.
Средства для компенсации температурных деформаций выполнены каждое в виде соединенной с соответствующей подшипниковой опорой кольцевой мембраны, закрепленной соответственно на корпусе станины или на стойке вилки. Кольцевая мембрана обеспечивает возможность ограниченного осевого перемещения подшипниковой опоры и, таким образом, позволяет компенсировать температурные деформации монтировки, обеспечивая при этом необходимую жесткость соответствующего опорного узла.
Вместе с этим по меньшей мере один из упомянутых оптических блоков выполнен сменным. Такое выполнение позволяет, с одной стороны, расширить функциональные возможности оптического устройства, а с другой стороны, позволяет уменьшить массогабаритные характеристики его поворотных частей, т.к. обеспечивается возможность устанавливать оптический блок только с той оптико-электронной аппаратурой, которая действительно необходима для конкретного случая внешнетраекторных измерений или для конкретного измерительного поста.
Кроме того, оптическое устройство снабжено уравновешивающими массами, которые соответственно закреплены на упомянутых фланцах полого вала угломестной оси вращения. Такое выполнение обеспечивает, при необходимости, возможность точного уравновешивания качающейся части оптического устройства относительно угломестной оси, например, при смене оптических блоков. Кроме того, посредством этих уравновешивающих масс может обеспечиваться уравновешивание вращающейся части оптического устройства относительно азимутальной оси.
Оптическое устройство может быть снабжено съемным кожухом, выполненным с возможностью охвата опорно-поворотного устройства с упомянутыми оптическими блоками в нерабочем положении оптического устройства. Съемный кожух обеспечивает защиту опорно-поворотного устройства с оптическими блоками от внешних воздействий при эксплуатации, например при длительном перерыве в работе или при неблагоприятных атмосферных условиях, а также при транспортировке.
Технический результат использования изобретения состоит в том, что обеспечивается возможность создания компактного многофункционального транспортабельного оптического устройства для наблюдения за летающими объектами, обладающего одновременно функциональными возможностями кинотеодолита и оптического локатора и сочетающего в себе достоинства последних. Вместе с этим использование изобретения обеспечивает повышение точности наведения оптического устройства и возможность преобразования оптического устройства соответственно задачам, решение которых оно должно обеспечивать.
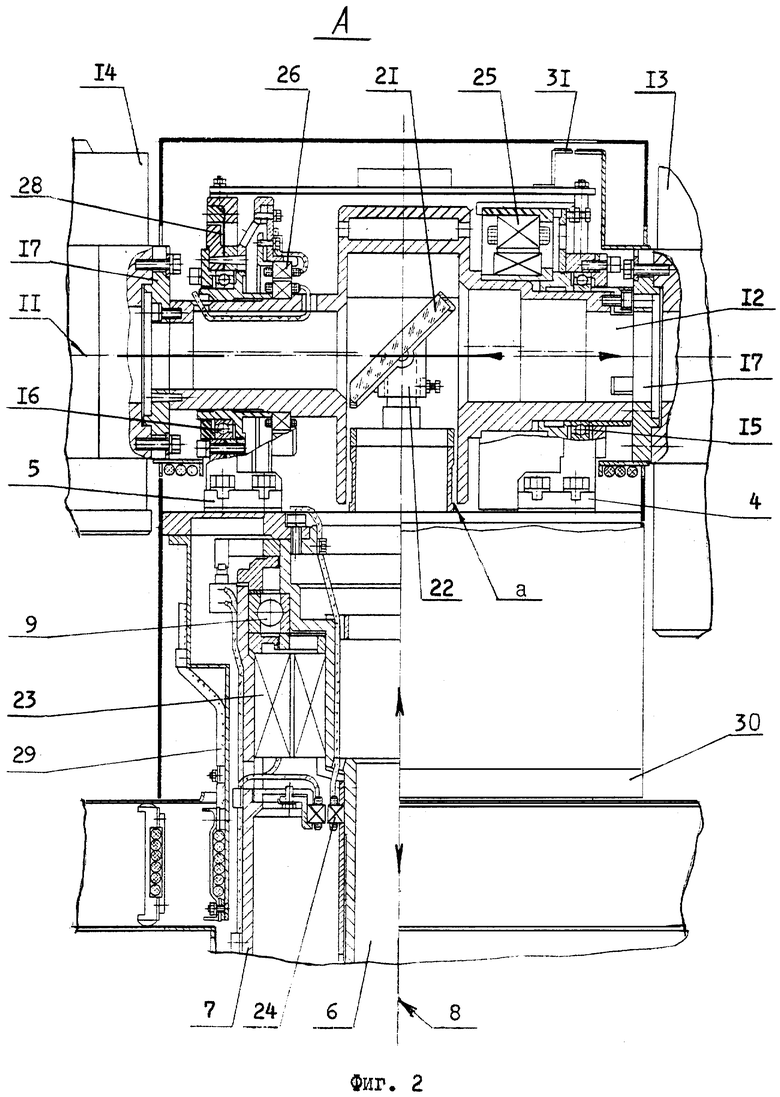
На фиг. 1 схематически показано оптическое устройство с надетым съемным кожухом, общий вид (компоновка, используемая при работе в активном режиме); на фиг. 2 - устройство вала угломестной оси и вилка ОПУ с моментными двигателями и датчиками угла поворота, элемент А на фиг.1.
Оптическое устройство содержит установленное на основании 1 опорно-поворотное устройство 2. ОПУ включает в себя вилку 3 с двумя стойками 4 и 5 и штырем 6, установленную в станине 7 с возможностью поворота вокруг азимутальной оси 8. Узлы вращения вилки вокруг азимутальной оси выполнены в виде верхней и нижней подшипниковых опор 9 и 10. В вилке 3 с возможностью поворота вокруг угломестной оси 11 установлен полый вал 12 с первым и вторым оптическими блоками 13 и 14. Узлы вращения полого вала 12 вокруг угломестной оси 11 выполнены в виде подшипниковых опор 15 и 16, закрепленных соответственно на стойках 4 и 5 вилки 3. Внутри полого вала 12 выполнены кольцевые расточки заданных размеров, оси которых расположены каждая с заданным эксцентриситетом относительно оси вращения полого вала 12, геометрически совмещенной с угломестной осью 11. Параметры расточек определяются массогабаритными характеристиками полого вала 12 и монтируемых на нем узлов и элементов. Благодаря такому выполнению полого вала 12 обеспечивается приведение центра тяжести качающейся части (т.е. части устройства, установленной с возможностью поворота относительно угломестной оси 11) к оси вращения последней, т.е. обеспечивается уравновешивание относительно угломестной оси. К концам полого вала 12, установленного в подшипниковых опорах 15 и 16, посредством фланцев 17 соответственно присоединены первый и второй оптические блоки 13 и 14.
Оптические блоки 13 и 14 выполнены сменными. В варианте осуществления изобретения предусмотрено, например, два сменных (устанавливаемых попеременно) оптических блока 13. В одном сменном оптическом блоке 13 размещается приемопередающая оптика для лазерного дальномера, которая используется при работе оптического устройства в активном режиме. В другом сменном оптическом блоке 13, который используется при работе оптического устройства только в пассивном режиме, размещена, например, телевизионная камера узкого поля (камера с узкопольным объективом). Оптический блок 14 содержит оптико-электронные устройства, обеспечивающие только прием оптического сигнала, и по существу этот оптический блок является блоком датчиков. В данном блоке могут быть размещены, например, матричный инфракрасный приемник со своей оптикой или матричный телевизионный приемник широкого поля со своей оптикой или телевизионный фотометр. Информация с оптического блока 14 в виде электрических сигналов по кабальным связям поступает на аппаратуру системы управления, размещенную отдельно от оптического устройства (на чертеже не показано). В варианте осуществления изобретения данный оптический блок при работе оптического устройства в пассивном режиме обеспечивает решение, например, следующих задач:
- измерение угловых координат летающих объектов различного назначения;
- осуществление инфракрасной фотометрии;
- получение детальных изображений летающих объектов.
В варианте выполнения на фланцах 17 также могут быть закреплены уравновешивающие массы (на чертеже не показано). Посредством уравновешивающих масс обеспечивается точное уравновешивание качающейся части оптического устройства, например, при смене оптических блоков 13 и/или 14.
Оптическое устройство снабжено оптико-механическим блоком 18, выполненным с возможностью установки между станиной 7 ОПУ и основанием 1. В оптико-механическом блоке 18 размещена оптико-электронная аппаратура 19 с отражающим элементом 20. В варианте осуществления изобретения оптико-электронная аппаратура 19 включает в себя, например, лазерный излучатель, лазерный светоприемник и телевизионную камеру узкого поля. Информация с оптико-механического блока 18 в виде электрических сигналов по кабельным связям поступает на упомянутую аппаратуру системы управления. Оптико-механический блок 18 совместно с оптическим блоком 13, снабженным приемопередающей оптикой для лазерного дальномера, при работе оптического устройства в активном режиме обеспечивают решение, например, следующих задач:
- измерение наклонной дальности до летающих объектов (например, космических аппаратов), снабженных отражателями;
- измерение наклонной дальности до летающих объектов, не снабженных отражателями;
- измерение угловых координат летающих объектов;
- осуществление фотометрии с целью определения ориентирования летающих объектов, их динамического состояния и формы;
- выполнение спектрального анализа летающих объектов.
Устройство снабжено последовательно установленными отражающими элементами, образующими лучевод с возможностью прохождения оптического луча от первого оптического блока 13 к оптико-механическому блоку 18. Лучевод имеет участки, совмещенные соответственно с азимутальной и угломестной осями вращения 8 и 11, и включает в себя, в частности, отражающие элементы 20 и 21, которые выполнены в виде плоских зеркал. (Другие отражающие элементы лучевода, например, расположенные в первом оптическом блоке 13, на чертеже не показаны).
Внутри полого вала 12 в месте пересечения азимутальной и угломестной осей наведения 8 и 11 на опоре 22 установлен отражающий элемент (плоское зеркало) 21 с устройством регулировки (коррекции) его положения (на чертеже не показано). Опора 22 закреплена на штыре 6, который выполнен с возможностью прохождения оптического луча. вдоль азимутальной оси 8. При этом плоское зеркало 21 размещено внутри полого вала 12, для чего в корпусе последнего выполнен вырез "а". Плоское зеркало 21 отражает направленный вдоль оси полого вала 12 световой пучок от первого оптического блока 13 и через вырез "а" направляет его вдоль оси штыря 6 к отражающему элементу 20, размещенному в оптико-механическом блоке 18. Отражающий элемент 20 направляет световой пучок к оптико-электронной аппаратуре 19, где оптические сигналы преобразуются в электрические, которые поступают на аппаратуру системы управления.
Оптическое устройство снабжено приводами вращения относительно азимутальной и угломестной осей 8 и 11. Приводы вращения выполнены в виде моментных двигателей. Наведение по оси 8 обеспечивается моментным двигателем 23 и датчиком 24 угла поворота по азимуту. Последние установлены между подшипниковыми опорами 9 и 10. При этом роторы моментного двигателя 23 и датчика 24 соответственно закреплены на штыре 6 вилки, а их статоры закреплены на корпусе станины 7. Наведение по оси 11 обеспечивается моментным двигателем 25 и датчиком 26 утла поворота по углу места. Моментный двигатель 25 и датчик 26 расположены по концам полого вала 12 с внутренней стороны стоек соответственно 4 и 5. Роторы моментного двигателя 25 и датчика 26 закреплены на корпусе полого вала 12, а их статоры посредством переходников консольно закреплены соответственно на стойках 4 и 5.
Подшипниковые опоры 10 и 16 опорно-поворотного устройства 2 снабжены средствами для компенсации температурных деформаций ОПУ. В варианте выполнения средства для компенсации температурных деформаций выполнены каждое в виде соединенной с соответствующей подшипниковой опорой кольцевой мембраны соответственно 27 и 28. Кольцевая мембрана 27 закреплена на корпусе станины 7, а кольцевая мембрана 28 закреплена на стойке 5 вилки 3. Кольцевые мембраны 27 и 28 обеспечивают возможность ограниченного осевого перемещения подшипниковых опор соответственно 10 и 16 при температурных деформациях опор ОПУ оптического устройства. Благодаря этому исключается возможность заклинивания подшипников или увеличения момента сопротивления вращению соответственно штыря 6 вилки или полого вала 12.
Опорно-поворотное устройство 2 снабжено кабелепереходом 29 с вилки 3 на станину 7. Также предусмотрены кабелепереходы между вилкой и оптическими блоками (на чертеже не показано). Между станиной 7 и штырем вилки 3, а также между полым валом 12 и одной из стоек вилки 3 установлены устройства фиксации их взаимного положения (на чертеже не показано). С помощью этих устройств обеспечивается жесткая фиксация взаимного положения поворотных и неподвижной частей ОПУ при хранении и транспортировке оптического устройства. Упомянутые устройства фиксации взаимодействуют с концевыми выключателями, соответственно блокирующими приводы вращения вокруг азимутальной и угломестной осей. Для визуального отсчета углов поворота ОПУ при проведении, например, регламентных и юстировочных работ на поворотных частях ОПУ предусмотрены отсчетные устройства с лимбами 30 и 31.
Вместе с этим оптическое устройство снабжено съемным кожухом 32. Съемный кожух предназначен для защиты опорно-поворотного устройства 2 с оптическими блоками 13 и 14 от внешних воздействий, например, при длительном перерыве в работе, а также при неблагоприятных атмосферных условиях и транспортировке. Кроме того, ОПУ снабжено буферными устройствами, которые предназначены для безударного торможения и остановки поворотных частей ОПУ на предельных углах наведения при несрабатывании концевых выключателей приводов вращения (на чертеже не показано). В варианте осуществления изобретения каждое буферное устройство содержит пружинный буфер, выполненный, например, в виде консольно закрепленной пластинчатой пружины. С пластинчатыми пружинами взаимодействуют упоры, соответственно установленные на поворотных частях ОПУ.
Оптическое устройство работает следующим образом.
Устройство доставляют на подготовленную позицию, где опорно-поворотное устройство 2 с оптическими блоками 13 и 14 устанавливают на закладных частях основания 1. При этом станину 7 опорно-поворотного устройства устанавливают на основании 1 либо непосредственно (в случае использования устройства для работы только в пассивном режиме), либо через оптико-механический блок 18 (в случае использования устройства для работы как в пассивном, так и в активном режимах). Перед работой с опорно-поворотного устройства снимают съемный кожух 32, расштыривают поворотные части опорно-поворотного устройства. В исходном положении оптические блоки направлены в зенит. К соответствующим разъемам оптического устройства подключают кабельные связи от аппаратуры системы управления (на чертеже не показано). Перед началом работы устройства на пего подают силовое питание.
Наведение оптических блоков 13 и 14 на наблюдаемый объект может производиться раздельно или одновременно по осям 8 и 11. Моментные двигатели 23 и 25 безредукторных приводов наведения обеспечивают поворот подвижных частей опорно-поворотного устройства, а также удержание этих частей на любом угле наведения при включенном питании моментных двигателей. При наведении оптического устройства датчики угла поворота, роторы которых установлены соответственно непосредственно на штыре 6 и валу 12, обеспечивают выдачу сигналов о фактических углах поворота в управляющую ЭВМ аппаратуры системы управления.
Кольцевые мембраны 27 и 28 обеспечивают возможность ограниченного осевого перемещения подшипниковых опор 10 и 16 и, таким образом, позволяют компенсировать температурные деформации монтировки, которые могут быть вызваны, например, тепловыделением моментных двигателей при работе в режиме длительного сеанса (например, 12 ч) или воздействием солнечной радиации. Благодаря этому исключается возможность заклинивания подшипников или резкого увеличения момента сопротивления вращению.
При работе оптического устройства в пассивное режиме информация от оптического блока 14 (блока датчиков) в виде электрических сигналов по кабельным связям поступает на аппаратуру съема и обработки информации (аппаратуру системы управления). При работе устройства в активном режиме оптические сигналы, принимаемые оптическим блоком 13, через лучевод поступают в оптико-механический блок 18, где с помощью оптико-электронной аппаратуры 19 преобразуются в электрические, которые по кабельным связям передаются также в систему управления. Таким образом, оптическое устройство обеспечивает возможность получения информации в реальном масштабе времени.
Таким образом, благодаря особенностям выполнения оптического устройства, изобретение обеспечивает возможность создания компактного многофункционального транспортабельного оптического устройства для наблюдения за летающими объектами. При этом изобретение позволяет повысить точность наведения оптического устройства, в частности, путем повышения жесткости ОПУ последнего, повышения степени уравновешенности поворотных частей, размещения моментных двигателей и датчиков угла поворота непосредственно на исполнительных осях, и исключения возможности заклинивания подшипников подшипниковых опор и возможности увеличения момента сопротивления вращению вследствие температурных деформаций устройства. Вместе с этим использование изобретения обеспечивает, при необходимости, возможность быстрого преобразования оптического устройства соответственно задачам, решение которых оно должно обеспечивать, что позволяет существенно расширить функциональные возможности оптического устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1999 |
|
RU2166783C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2137167C1 |
| МОБИЛЬНЫЙ ОПТИЧЕСКИЙ ТЕЛЕСКОП | 2014 |
|
RU2565355C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2016 |
|
RU2616341C1 |
| МОБИЛЬНОЕ, ПРЕИМУЩЕСТВЕННО ОПТИЧЕСКОЕ, УСТРОЙСТВО | 1998 |
|
RU2145136C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО С СИММЕТРИЧНОЙ МОНТИРОВКОЙ | 2001 |
|
RU2213363C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1996 |
|
RU2111519C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2119681C1 |
| СПОСОБ СЛЕЖЕНИЯ ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА ЗА ПОДВИЖНЫМ ОБЪЕКТОМ | 2013 |
|
RU2546054C1 |
| АЗИМУТАЛЬНО-УГЛОМЕСТНАЯ АНТЕННАЯ УСТАНОВКА С ЧЕТЫРЕХЗЕРКАЛЬНЫМ ЛУЧЕВОДОМ | 1995 |
|
RU2094916C1 |
Изобретение относится к оптическому приборостроению и может быть использовано в устройствах, предназначенных для внешнетраекторных измерений в космической геодезии и полигонных измерениях. Оптическое устройство содержит опорно-поворотное устройство на основании, узлы и приводы вращения вокруг азимутальной и угломестной осей с датчиками угла поворота, оптико-электронную аппаратуру, оптико-механический блок с излучателем и последовательно установленные отражательные элементы. Опорно-поворотное устройство включает вилку с двумя стойками и штырем. Оптико-механический блок установлен между станиной и основанием. На стойках вилки в подшипниковых опорах установлен полый вал, к каждому из концов которого при помощи фланца присоединено по одному оптическому блоку. Отражающие элементы образуют лучевод с возможностью прохождения оптического луча от одного из оптических блоков к оптико-механическому блоку. Полый вал выполнен с вырезом с возможностью размещения в нем одного из отражающих элементов. Штырь установлен в двух разнесенных по высоте подшипниковых опорах. Каждый привод содержит моментный двигатель, включающий статор и ротор. Одна из подшипниковых опор каждой из осей вращения опорно-поворотного устройства снабжена средством для компенсации температурных деформаций. Технический результат состоит в создании компактного многофункционального транспортабельного высокоточного оптического устройства для наблюдения за летающими объектами. 4 з.п. ф-лы, 2 ил.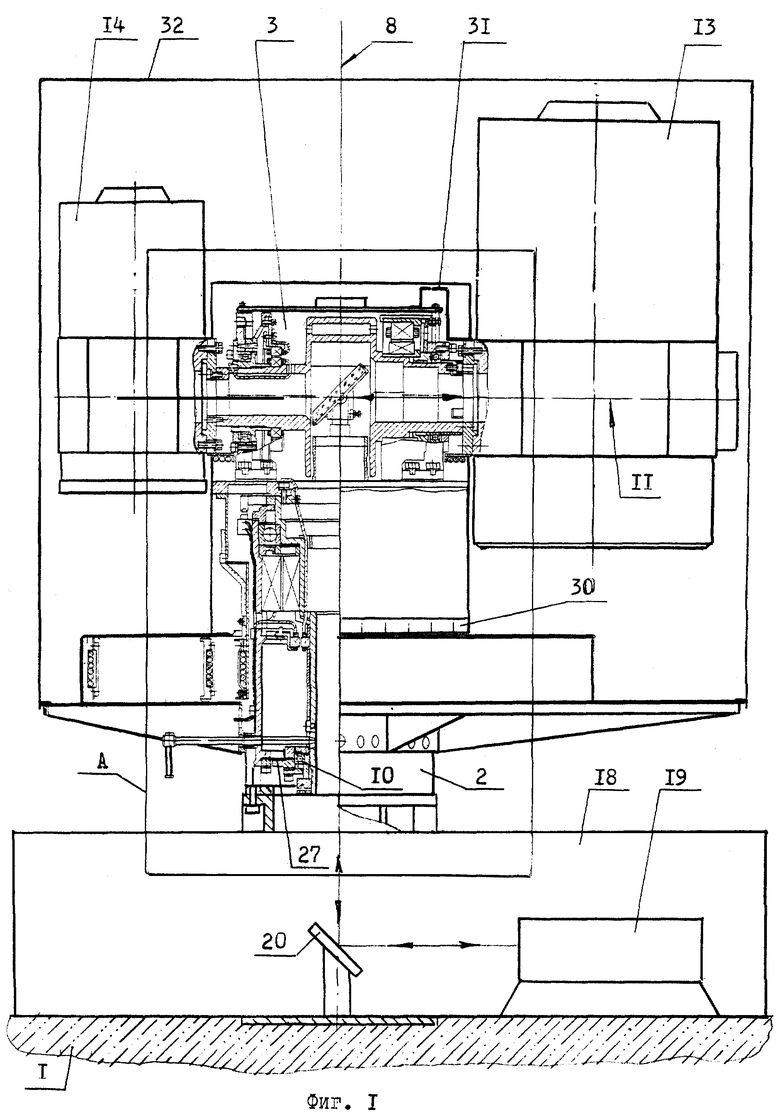
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2119681C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2137167C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1996 |
|
RU2111519C1 |
| US 4362354 А, 07.12.1982 | |||
| ФИКСАТОР | 2008 |
|
RU2463424C2 |
| Опорное устройство для экваториальной монтировки оптического телескопа | 1984 |
|
SU1195324A1 |

