Изобретение относится к оптическому приборостроению и может быть использовано при слежении за подвижными объектами с помощью больших по астрономическим меркам телескопов с альт-азимутальной монтировкой с телами качения в опоре вращения по азимуту.
Известен способ слежения (наведения) телескопа с альт-азимутальной монтировкой за подвижным объектом, при котором осуществляют поворот опорно-поворотного устройства (ОПУ) телескопа посредством вертикального штыря (другие используемые термины: ось, колонна, станина), который кинематически связан с приводом вращения по азимуту. Известный способ реализован, например, в шестиметровом телескопе БТА (Оптические телескопы. Теория и конструкция. Михельсон Н.Н. Главная редакция физико-математической литературы изд-ва «Наука», 1976, с.354-356, 407-408). Опорно-поворотное устройство, используемое в конструкции шестиметрового телескопа БТА, изготовлено по проекту заявителя предлагаемого изобретения. ОПУ содержит основание, образованную платформой с двумя стойками вилку с полым штырем, установленную на основании с возможностью поворота вокруг азимутальной оси, причем штырь выполнен со сферической цапфой, средник с оптическим блоком, установленный в вилке с возможностью поворота вокруг угломестной оси, узлы вращения и приводы вращения вокруг упомянутых осей. Для обеих осей вращения применены гидростатические подшипники. Вращение вокруг азимутальной оси осуществляется посредством сферической цапфы, опирающейся на шесть (три жестких и три подпружиненных) гидростатических опор (подушек). К сферической цапфе штыря прикреплена круглая горизонтальная платформа с двумя стойками, образующими вертикальную вилку. На нижнем конце полого штыря закреплено червячное колесо привода вращения по азимуту. Каждая из соприкасающихся со сферической цапфой самоустанавливающихся подушек размерами 750×750 мм имеет 4 углубления (паза), в которые под давлением около 70 МПа нагнетается масло, вытекающее наружу сплошной пленкой толщиной 0,15-0,18 мм, которая разделяет поверхности скольжения. Трение при перемещении имеет жидкостный характер. Масса телескопа как бы плавает на масле. Идеальные условия работы опоры возникают тогда, когда пленка имеет равную толщину. Это достигается регулировкой поступления масла во всех четырех пазах подушки. Таким образом, при помощи опор жидкостного трения (гидравлических подушек) решается проблема необходимой плавности слежения и точности наведения (вращения) при движении телескопа с ползучей скоростью.
Однако при использовании известного способа существует вероятность загрязнения зеркал телескопа, что связано с испарением циркулирующей рабочей жидкости (масла). Вместе с этим применение гидростатических подшипников существенно усложняет обслуживание телескопа.
Проблема обеспечения плавности слежения и точности наведения при движении с ползучей скоростью характерна для больших по астрономическим меркам оптических устройств с альт-азимутальной монтировкой с телами качения в опоре вращения по азимуту. Причиной этого является чрезмерная нагруженность концевой подшипниковой опоры штыря вилки (т.е. вала азимутальной оси) вследствие большой массы вращающейся части телескопа.
Из уровня техники известны средства, обеспечивающие разгрузку опоры вращения вертикального вала в осевом направлении, например, с помощью магнитной подвески. Известно ОПУ циркуляционного насосного агрегата ядерной энергетической установки, которое для уменьшения осевой силы, действующей на подшипниковую опору, содержит электромагнитное разгрузочное устройство (RU 2406878 C1, F04D 29/041, 2010). Электромагнитное разгрузочное устройство (ЭМРУ) включает неподвижный электромагнит и разгрузочный диск, закрепленный на валу лопастного насоса, ортогонально геометрической оси этого вала. Электромагнит образуют кольцевой магнитопровод и кольцевая электрическая катушка, установленная в кольцевой полости магнитопровода. Торцевые поверхности разгрузочного диска и электромагнита, обращенные друг к другу, разделены воздушным зазором, открытым в окружающее насос пространство.
Однако известный способ разгрузки подшипниковой опоры вращения имеет ограниченную область использования и не предполагает обеспечения возможности контроля и управления величиной разгрузки подшипниковой опоры.
Наиболее близким по совокупности существенных признаков с заявляемым изобретением является способ слежения (наведения) за подвижным объектом, приведенный в описании изобретения по патенту RU 2166783 С2 (G02В 23/16, 2001). В известном способе слежения осуществляют поворот ОПУ телескопа посредством вертикального штыря, который кинематически связан с приводом вращения по азимуту. Способ осуществляется с помощью ОПУ, которое содержит основание, образованную платформой с двумя стойками вилку с полым штырем, установленным на основании с возможностью поворота вокруг азимутальной оси, причем штырь выполнен со сферической пятой (концевой цапфой), средник с оптическим блоком, установленный в вилке с возможностью поворота вокруг угломестной оси, узлы вращения и приводы вращения вокруг упомянутых осей. Сферическая пята (концевая цапфа) выполнена на нижнем конце штыря с возможностью взаимодействия с подпятником, установленным на основании. Опоры вращения по азимуту содержат тела качения. Особенности выполнения узлов вращения вокруг азимутальной оси позволяют уменьшить момент сопротивления вращению вилки, что дает возможность использовать безредукторный привод наведения с моментным двигателем. При этом узел вращения вилки, воспринимающий осевые нагрузки, выполнен с минимально возможными размерами по диаметру, благодаря чему уменьшается момент сопротивления вращению вилки и обеспечивается возможность использования для азимутальной оси моментного двигателя сравнительно небольшой мощности.
Однако при вращении телескопа на малых (ползучих) скоростях возможна смена трения качения на трение покоя, что сопровождается увеличением момента сопротивления вращению и может происходить не плавное, а скачкообразное движение, что негативно сказывается на точности наведения оптического блока и плавности слежения за подвижным объектом.
Задачей настоящего изобретения является повышение точности наведения и плавности слежения большого по астрономическим меркам оптического устройства с альт-азимутальной монтировкой с телами качения в опоре вращения по азимуту.
Эта задача решается благодаря тому, что в известном способе слежения телескопа за подвижным объектом, при котором осуществляют поворот опорно-поворотного устройства телескопа посредством вертикального штыря (другие используемые термины: полая ось, колонна, станина), который кинематически связан с приводом вращения по азимуту, согласно изобретению при вращении штыря концевую подшипниковую опору штыря разгружают в осевом направлении посредством электромагнитного разгрузочного устройства.
Вместе с этим при осуществлении разгрузки концевой подшипниковой опоры штыря контролируют величину усилия вертикальной разгрузки опорного подшипника последней посредством тензометрических весоизмерительных датчиков, установленных между корпусом концевой подшипниковой опоры штыря и основанием опорно-поворотного устройства равномерно по окружности вокруг продольной оси, которая геометрически совмещена с азимутальной осью, передают данные измерения от упомянутых датчиков в вычислительное устройство системы управления телескопа и с помощью последней определяют и устанавливают необходимую величину усилия разгрузки опорного подшипника концевой подшипниковой опоры штыря.
Технический результат использования изобретения состоит в том, что оно обеспечивает повышение надежности и точности наведения большого по астрономическим меркам телескопа при обеспечении слежения с ползучей скоростью.
В сравнении со способами слежения за подвижным объектом, при которых необходимая плавность слежения и точность наведения (вращения) при движении телескопа с ползучей скоростью обеспечивается путем применения гидростатических подшипников (опор), предлагаемое решение благодаря применению электромагнитного разгрузочного устройства позволяет существенно упростить обслуживание телескопа и повысить удобство его эксплуатации, исключив возможность загрязнения зеркал, связанного с испарением циркулирующей рабочей жидкости (масла) при слежении с использованием гидростатических подшипников.
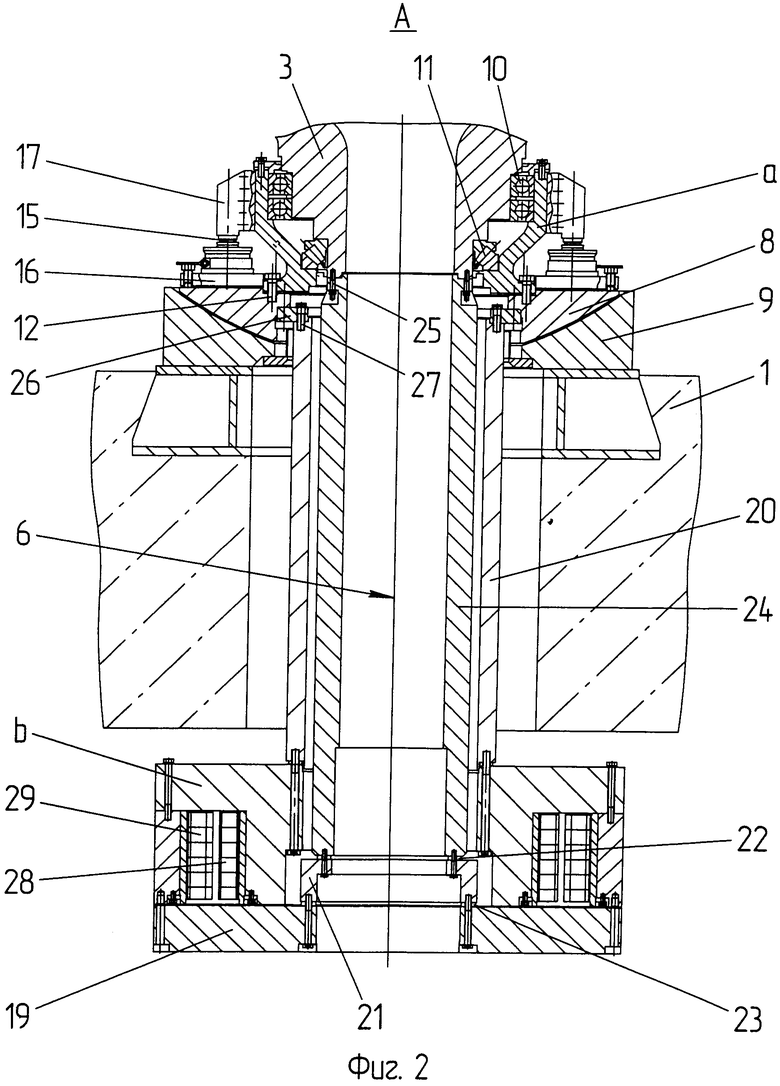
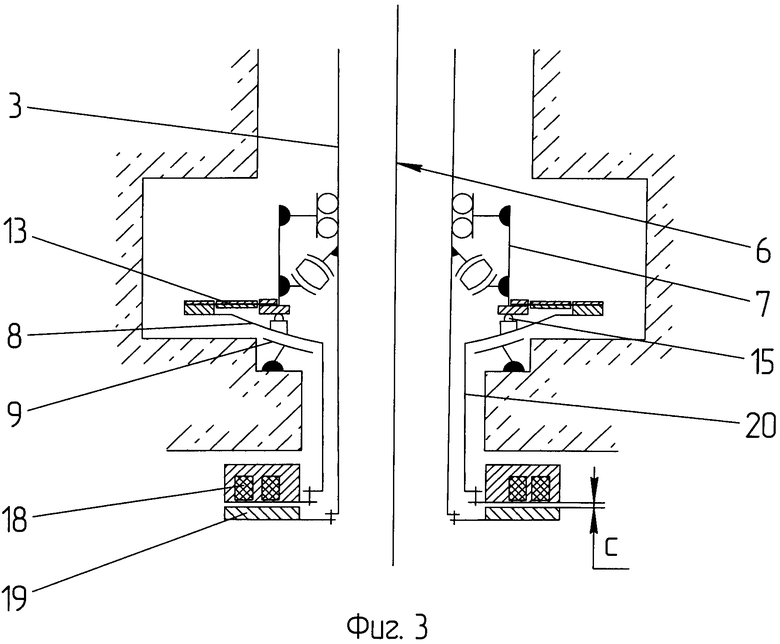
На фиг.1 схематично показано ОПУ телескопа, общий вид, продольный разрез; на фиг.2 - концевая подшипниковая опора и электромагнитное разгрузочное устройство, элемент А на фиг.1, продольный разрез; на фиг.3 - схематично показан штырь вилки ОПУ телескопа с концевой подшипниковой опорой, электромагнитным разгрузочным устройством и тензометрическими весоизмерительными датчиками.
В варианте выполнения изобретения способ осуществляется с помощью опорно-поворотного устройства телескопа, которое содержит основание 1, вилку 2 с полым штырем 3. Вилка 2 включает в себя платформу с двумя стойками. В вилке с возможностью поворота вокруг угломестной оси 4 установлен средник 5 с оптическим блоком. Вилка 2 установлена на основании 1 с возможностью поворота относительно азимутальной оси 6. Средник с оптическим блоком и вилка соответственно снабжены безредукторными приводами вращения относительно осей 4 и 6. Наведение по осям 4, 6 обеспечивается моментными двигателями, датчиками положения по углу и датчиками скорости (на чертеже не показано).
Штырь 3 установлен посредством закрепленной на основании 1 регулировочной радиальной подшипниковой опоры (на чертеже не показано), расположенной в верхней части штыря, и концевой подшипниковой опоры 7, расположенной в нижней части штыря. Последняя соединена со сферической пятой (концевой цапфой) 8, взаимодействующей с подпятником 9, установленным на основании 1. Сферическая пята 8 и подпятник 9 обеспечивают возможность приведения азимутальной оси 6 телескопа в вертикальное положение. Концевая подшипниковая опора 7 включает, например, три подшипника: радиально-упорные - 10 и опорный сферический роликовый - 11.
Концевая подшипниковая опора 7 соединена со сферической пятой 8 с возможностью ограниченного перемещения вдоль продольной оси, которая геометрически совмещена с азимутальной осью 6 ОПУ. В варианте осуществления изобретения корпус «а» концевой подшипниковой опоры соединен со сферической пятой посредством крепежных болтов 12, выполняющих функцию страхующих захватов при сейсмике и мембран 13, которые расположены в плоскости, ортогональной азимутальной оси 6 и установлены равномерно по окружности относительно последней. Мембраны 13 воспринимают радиальную нагрузку относительно азимутальной оси 6 и выполняют функцию элементов, центрирующих корпус «а» концевой подшипниковой опоры 7 относительно сферической пяты 8.
ОПУ снабжено электромагнитным разгрузочным устройством 14 с возможностью обеспечения заданной разгрузки концевой подшипниковой опоры 7 в осевом направлении и системой контроля и управления величиной разгрузки концевой подшипниковой опоры. Система контроля и управления величиной разгрузки концевой подшипниковой опоры 7 включает тензометрические весоизмерительные датчики 15, каждый из которых установлен на сферической пяте 8 посредством соответствующего опорного элемента 16 и контактирует с соответствующим ответным упором 17, закрепленным на корпусе «а» концевой подшипниковой опоры.
В качестве тензометрического весоизмерительного датчика может быть использован, например, датчик весоизмерительный типа NHS-A47t. Корпус «а» концевой подшипниковой опоры установлен на весоизмерительных датчиках 15 с образованием зазора между нижней торцевой поверхностью корпуса «а» и ответной торцевой поверхностью сферической пяты 8. При этом крепежные болты 12, выполняющие функцию страхующих захватов при сейсмике, ввинчены в сферическую пяту 8 с образованием между головками болтов 12 и ответным фланцем корпуса «a» концевой подшипниковой опоры 7 зазора, достаточного для обеспечения разгрузки опорного подшипника 11. Необходимо отметить, что все перемещения при разгрузке опорного подшипника 11 находятся в пределах упругих деформаций.
В варианте осуществления изобретения электромагнитное разгрузочное устройство включает электромагнит 18 и разгрузочный диск 19. Электромагнит 18 закреплен снизу на сферической пяте 8 посредством пропущенного через подпятник 9 трубчатого элемента 20. Разгрузочный диск 19 выполнен с центральным отверстием и с помощью кольцевого переходника 21 и пригоночных прокладок 22, 23 закреплен на полом штыре 3 (по существу - на валу азимутальной оси телескопа) посредством трубчатого элемента 24, который с радиальным зазором пропущен через трубчатый элемент 20. Трубчатый элемент 24 соединен со штырем с помощью, например, шпилек 25. Трубчатый элемент 20 соединен со сферической пятой 8 через фланец 26 с помощью болтов 27. При этом разгрузочный диск 19 установлен ортогонально продольной оси трубчатого элемента 24, которая геометрически совмещена с азимутальной осью 10. Трубчатые элементы 20 и 24 выполнены, например, из титанового сплава. Таким образом исключается влияние магнитного поля ЭМРУ на работоспособность ОПУ. Электромагнит 18 включает кольцевой магнитопровод «b», в кольцевой выемке которого размещены, например, две кольцевые электрические катушки 28, 29. Торцевые поверхности разгрузочного диска 19 и электромагнита 18, обращенные друг к другу, при выключенном электромагните расположены с заданным воздушным зазором «c». Заданный зазор обеспечивается с помощью пригоночных прокладок 22, 23.
Система контроля и управления величиной разгрузки концевой подшипниковой опоры электрически связана с управляющей ЭВМ (на чертеже не показано), которая формирует сигналы управления приводами вращения (наведения).
В варианте осуществления изобретения предлагаемый способ слежения за подвижным объектом реализуется следующим образом.
Наведение (слежение) оптического блока на наблюдаемый объект может производиться раздельно или одновременно по осям 4 и 6. Моментные двигатели безредукторных приводов вращения обеспечивают поворот подвижных частей монтировки, а также их удержание на любом угле наведения. При наведении телескопа датчики обратной связи положения по углу и скорости, соответственно связанные непосредственно с угломестным и азимутальным валами, обеспечивают выдачу сигналов о фактических углах поворота, а также скорости вращения относительно соответствующих осей наведения в управляющую ЭВМ (на чертеже не показано), которая формирует сигналы управления приводами вращения (наведения).
При подаче питания на электрические катушки 28, 29 электромагнита 18 возникает магнитное поле, притягивающее разгрузочный диск 19 к кольцевому магнитопроводу «b». Разгрузочный диск 19 с помощью кольцевого переходника 21 посредством трубчатого элемента 24 с помощью шпилек 25 соединен с полым штырем 3 (т.е. - с валом азимутальной оси), опирающимся своими заплечиками на опорный подшипник 11, воспринимающий весь вес вращающейся части телескопа. Под действием магнитного поля разгрузочный диск 19 посредством переходника 21 и трубчатого элемента 24 приподнимает нагруженный массой вращающейся части телескопа вал 3 азимутальной оси телескопа, разгружая опорный подшипник 11 на величину, равную притягивающей силе, возникающей в электромагните 18. Величина тока электрических катушек электромагнита ЭМРУ определяется исходя из значений задания величины разгрузки и величины сигнала действующей нагрузки на опорный подшипник 11, полученного от тензометрических весоизмерительных датчиков 15. Тензометрические весоизмерительные датчики 15 при достижении усилия разгрузки необходимой величины дают сигнал в систему управления телескопа о готовности к наведению.
Электромагнитное разгрузочное устройство может находиться в следующих режимах.
Режим холостого хода. Ожидание, ток электрических катушек 28, 29 электромагнита 18 равен нулю.
Режим работы. ЭМРУ получает от системы управления телескопа значение необходимой величины электромагнитной разгрузки. В электрических катушках 28, 29 электромагнита 18 течет ток, пропорциональный заданной электромагнитной разгрузке.
Режим рекуперации. Наступает при снятии задания и отключении электромагнитной разгрузки. Электрические катушки электромагнита 18 шунтируются (замыкаются). Запасенная в магнитном поле электрических катушек 28, 29 электромагнитная энергия плавно уменьшается по экспоненциальному закону.
Режим размагничивания. Служит для устранения остаточного намагничивания кольцевого магнитопровода «b» электромагнита 18. В течение, например, трех секунд в электрических катушках 28, 29 электромагнита 18 протекает ток обратной направленности (по отношению к току в режиме работы).
Перевод ЭМРУ с режима холостого хода (ожидания) в режим работы и обратно производится системой управления телескопа. При этом режимы рекуперации и размагничивания отрабатываются автоматически при снятии задания электромагнитной разгрузки.
Благодаря возможности уменьшения веса, приходящегося на опорный подшипник 11, достигается уменьшение момента его сопротивления вращению, что особенно важно при движении большого по астрономическим меркам телескопа с ползучими скоростями - (2-5) ′′/с, т.к. на этих скоростях возможна смена трения качения на трение покоя. Известно, что трение покоя, по меньшей мере, в два раза больше трения качения, поэтому при вращении на малых скоростях с большим моментом сопротивления вращению может происходить не плавное, а скачкообразное движение. Уменьшение веса, приходящегося на опорный подшипник, пропорционально снижает момент его сопротивления вращению и разницу в моментах сопротивления вращению при смене трения покоя на трение качения, тем самым, повышая плавность движения вращающейся части телескопа и, соответственно, точность слежения телескопа за объектами.
Таким образом, благодаря особенностям исполнения, предлагаемый способ слежения телескопа за подвижным объектом обеспечивает повышение надежности и точности наведения большого по астрономическим меркам телескопа с альт-азимутальной монтировкой с телами качения в опоре вращения по азимуту при обеспечении слежения с ползучей скоростью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА | 2014 |
|
RU2572218C9 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1999 |
|
RU2166783C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2137167C1 |
| МОБИЛЬНЫЙ ОПТИЧЕСКИЙ ТЕЛЕСКОП | 2014 |
|
RU2565355C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2000 |
|
RU2187137C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО С СИММЕТРИЧНОЙ МОНТИРОВКОЙ | 2001 |
|
RU2213363C2 |
| Телескоп | 1983 |
|
SU1108379A1 |
| Опорное устройство телескопа | 1981 |
|
SU1032237A1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1996 |
|
RU2111519C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2119681C1 |
Изобретение относится к оптическому приборостроению и может быть использовано для больших телескопов с альт-азимутальной монтировкой с телами качения в опоре вращения по азимуту. При реализации способа осуществляют поворот опорно-поворотного устройства телескопа посредством вертикального штыря, который кинематически связан с приводом вращения по азимуту. При вращении штыря с ползучей скоростью концевую подшипниковую опору штыря разгружают в осевом направлении посредством электромагнитного разгрузочного устройства. При осуществлении разгрузки контролируют величину усилия вертикальной разгрузки опорного подшипника последней посредством тензометрических весоизмерительных датчиков. Передают данные измерения от упомянутых датчиков в вычислительное устройство системы управления телескопа и с помощью последней определяют и устанавливают необходимую величину усилия разгрузки опорного подшипника концевой подшипниковой опоры штыря. Изобретение обеспечивает повышение надежности слежения и точности наведения телескопа при обеспечении слежения с ползучей скоростью. 1 з.п. ф-лы, 3 ил.
1. Способ слежения преимущественно телескопа за подвижным объектом, при котором осуществляют поворот опорно-поворотного устройства телескопа посредством вертикального штыря, который кинематически связан с приводом вращения по азимуту, отличающийся тем, что при вращении штыря концевую подшипниковую опору штыря разгружают в осевом направлении посредством электромагнитного разгрузочного устройства.
2. Способ по п.1, отличающийся тем, что при осуществлении разгрузки концевой подшипниковой опоры штыря контролируют величину усилия вертикальной разгрузки опорного подшипника последней посредством тензометрических весоизмерительных датчиков, установленных между корпусом концевой подшипниковой опоры штыря и основанием опорно-поворотного устройства равномерно по окружности вокруг продольной оси, которая геометрически совмещена с азимутальной осью, передают данные измерения от упомянутых датчиков в вычислительное устройство системы управления телескопа и с помощью последней определяют и устанавливают необходимую величину усилия разгрузки опорного подшипника концевой подшипниковой опоры штыря.
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1999 |
|
RU2166783C2 |
| Опорное устройство орбитальной оси телескопа | 1978 |
|
SU667935A1 |
| Привод телескопа | 1960 |
|
SU137283A1 |
| US 20130258459 A1 03.10.2013 | |||
| US 20120307356 A1 06.12.2012 | |||

