Изобретение относится к области подводной техники и может быть использовано при проектировании и разработке доплеровских измерителей скорости течений и скорости движения подводных объектов относительно дна или среды.
Известно, что при построении высокоточного доплеровского лага, устанавливаемого, например, на борту автономного подводного аппарата, основным ограничением для достижения высокой точности является то, что по условиям применения лаг работает в импульсном режиме, используя при зондировании импульсные сигналы с минимальной скважностью и длительностью, которая определяется двойным временем пробега акустического сигнала от объекта до дна [1]. В режиме обзора/обследования высота движущегося объекта над дном составляет единицы метров, а длительность зондирующих сигналов, соответственно, единицы миллисекунд. Частотное разрешение Δf и дисперсия частотной оценки сигнала σf при обработке одиночного короткого отраженного сигнала определяется через его длительность τ0 и отношение сигнал/шум q известными соотношениями [2]
Δf = (τ0)-1; σf = (qτ0)-1.
Для получения необходимого частотного разрешения, обеспечивающего требуемую точность лага, применяется процедура усреднения полученных значений для большого числа N отраженных коротких импульсов с текущей обработкой данных на интервале времени, эффективная длительность которого удовлетворяет требованиям необходимого частотного разрешения:
ΔfN = (Nτ0)-1.
Соответственно дисперсия частотных оценок, при усреднении по N некогерентным отражением будет иметь вид:
Обычная схема построения приемного тракта доплеровского измерителя содержит антенну, аналоговый приемный блок, аналого-цифровой преобразователь и блок выделения доплеровской частоты, который может быть реализован либо в виде анализатора спектра методами Фурье-преобразования [3, 4], либо в виде цифрового следящего фильтра [5, 6].
Недостатком таких трактов является низкое быстродействие при обработке коротких импульсных сигналов.
Наиболее близким по технической сущности к заявленному решению является приемный тракт доплеровского лага, описанный в [6], состоящий из последовательно соединенных приемной антенны, аналогового блока, аналого-цифрового преобразователя и блока выделения доплеровских частот, в котором при усреднении данных за время, соответствующее примем P зондирующих импульсов, оценка дисперсии измеряемой скорости составляет, в принятых там обозначениях,
где
K - постоянная;
W - ширина спектра отраженного одиночного сигнала;
TS - длительность зондирующего импульса;
2E/M0=q2 - отношение сигнал/шум. Поскольку
W ≅ 1/TS,
то зависимость дисперсии от числа усредненных импульсов соответствует условиям некогерентной обработки 
Недостатком такого приемного тракта является низкая точность за счет высокой дисперсии частотной оценки, значительное увеличение времени накопления данных и, тем самым, уменьшение быстродействия лага. В конечном итоге, поскольку данные о скорости на выходе схемы обработки появляются через большие временные промежутки, уменьшается точность счисления пути.
Задачей настоящего предлагаемого технического решения является увеличение быстродействия приемного тракта доплеровского лага при обработке коротких импульсных сигналов за счет формирования и ускоренной обработки длинных квазикогерентных записей эхосигналов, что обеспечивает увеличение точности импульсного доплеровского лага.
Для решения поставленной задачи в приемный тракт доплеровского лага, содержащий последовательно соединенные антенну, блок аналоговой обработки, аналого-цифровой преобразователь (АЦП) и блок выделения доплеровской частоты между аналого-цифровым преобразователем и блоком выделения доплеровской частоты дополнительно введено буферное оперативное запоминающее устройство для накопления промежуточных данных и подключенный к нему контроллер, управляющий режимом накопления и обеспечивающий формирование в буферной памяти из серии отраженных сигналов малой длительности одной квазикогерентной записи, длительность которой устанавливается заданным частотным разрешением, причем накопление обеспечивается с минимальной частотой дискретизации.
Сопоставительный анализ заявляемого технического решения и прототипа показывает, что первый имеет в отличие от прототипа следующие существенные признаки:
- наличие БОЗУ для накопления промежуточных данных;
- наличие контроллера, управляющего режимом накопления данных и обеспечивающего формирование квазикогерентной записи.
В заявленном устройстве приемного тракта наличие дополнительного БОЗУ и контроллера позволяет накапливать промежуточные данные, управлять режимом накопления и обеспечивать формирование в буферной памяти из серии отраженных сигналов малой длительности одной квазикогерентной записи, длительность которой устанавливается заданным частотным разрешением, причем накопление обеспечивается с минимальной частотой дискретизации.
На основании изложенного следует, что заявленная совокупность существенных признаков приемного тракта имеет причинно-следственную связь с достигаемым техническим результатом, т.е. благодаря данной совокупности существенных признаков создан быстродействующий приемный тракт импульсного доплеровского лага, обеспечивающий высокую точность импульсного доплеровского лага.
Следовательно, заявляемое техническое решение является новым и обладает изобретательским уровнем, т.к. явным образом не следует из уровня техники.
Сущность изобретения поясняется чертежами, где на фиг. 1 изображена структурная схема приемного тракта доплеровского лага, на фиг. 2 - схема накопления когерентных прореженных данных.
Схема приемного тракта, содержит антенну 1, блок предварительной аналоговой обработки 2, преобразующий входной доплеровский спектр к низкой промежуточной частоте и выполняющий регулировки усиления, необходимые для работы высокоразрядного АЦП 3, БОЗУ 4, блок выделения доплеровской частоты 5 и контроллер 6, управляющий режимом накопления данных.
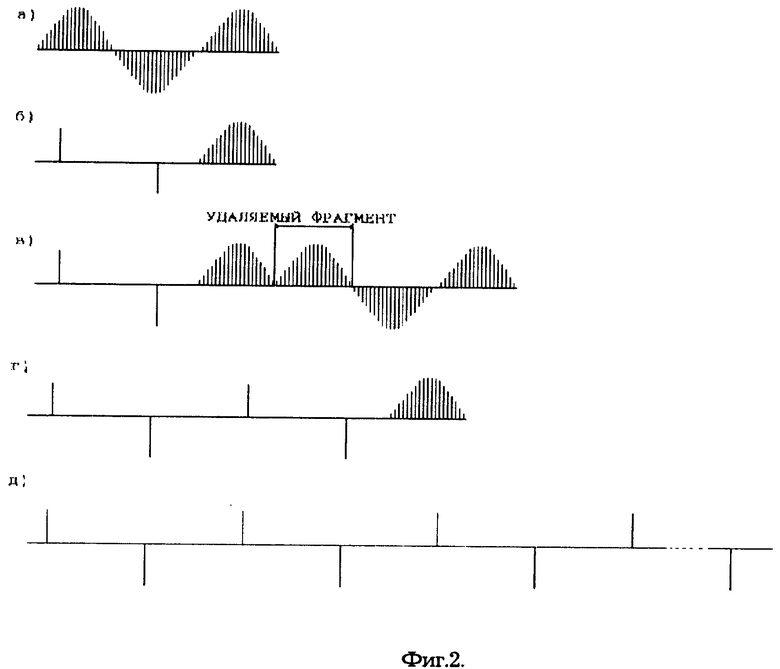
Приемный тракт доплеровского лага работает следующим образом. Процедура накопления квазикогерентных данных содержит три этапа обработки сигнала. Первым шагом является использование АЦП 3 с высокой частотой дискретизации, которая обеспечивает шаг дискретизации по фазе на промежуточной частоте fпр примерно 10 град. (fдискр = 36 • fпр). Далее после выполнения операции АЦП для первого отраженного сигнала и записи всех данных в БОЗУ 4, контроллер 6 выделяет промежуток приема второго отраженного сигнала, затем вычисляет огибающие первого и второго импульсов, производит анализ окончания первого и начала второго импульсов, отбрасывает лишние отсчеты промежуточной частоты и обеспечивает плавную (в пределах 10 град.) фазовую сшивку первого и второго импульсов. Последний этап обработки состоит в уменьшении числа отсчетов, сохраняемых в БОЗУ после фазовой сшивки фрагментов. Суть этого этапа состоит в прореживании исходных данных и записи в БОЗУ отсчетов с частотой fК, соответствующей правилу Котельникова (2 отсчета на период промежуточной частоты). В БОЗУ записываются с уменьшенной частотой все предыдущие отраженные сигналы, кроме последнего полупериода последнего сигнала. Этот полупериод сохраняется в БОЗУ на высокой частоте записи, чтобы обеспечить фазовую сшивку со следующим сигналом. Общая картина накопления данных поясняется на фиг. 2, где а) - первый импульс; б) - упаковка на низкой частоте и сохранение последнего полупериода; в) - фазовая сшивка со следующим импульсом; г) - упаковка очередного импульса; д) - полученная цифровая запись квазикогерентного сигнала;
Для сформированной записи сигнала длительностью T = N•τ0 , частотное разрешение составит
при значительном уменьшении дисперсии
Общее число оцифрованных отсчетов при накоплении данных за время T составит
MТ = T • fпр•36, а записанных в БОЗУ, с полным сохранением структуры сигнала
За счет этого обстоятельства соответственно уменьшаются емкость БОЗУ и время расчета спектра методом быстрого преобразования Фурье (БПФ) или число итераций при работе следящего фильтра.
Так, если положить относительную погрешность лага равной 10-3, в случае, если максимальное значение доплеровской частоты вдвое меньше промежуточной, получим MТ = 36 • 103, а M = 2•103. Такое значительное уменьшение объема обрабатываемых данных с сохранением необходимого разрешения позволяет реализовать схему обработки (вычисление спектра или слежение за центральной частотой) на стандартных сигнальных процессорах без привлечения специальных средств вычислительной техники.
Необходимое частотное разрешение и заданная погрешность достигается, как показали результаты обработки экспериментальных данных на минимальных временных интервалах (T ≈ 1с), в течение которых скорость объекта и, соответственно, доплеровская частота могут считаться неизменными.
Таким образом, в сравнении с прототипом, в заявленном изобретении приемный тракт доплеровского лага выполнен более быстродействующим при обработке коротких импульсных сигналов, что позволяет увеличить точность доплеровского лага.
Приемный тракт используется в доплеровском лаге на подводных аппаратах, разрабатываемых институтом, для измерения скорости течений и скорости движения аппарата.
Кроме того, данный приемный тракт можно использовать в автономных системах обработки сигналов, когда вычислительные ресурсы ограничены, но предъявляются высокие требования к точности измеряемых параметров сигнала.
Используемая литература
1. Гидроакустические навигационные средства - Л., Судостроение, 1983, 264 с.
2. В. С. Бурдик Анализ гидроакустических систем. - Л., Судостроение, 1988, с. 358.
3. J.L. Christensen. THE SW 2000. A NEW DOPPLER SONAR CURRENT PROFILER - OCEAN - 93, Vol. 2, p. 387-389
4. F. Y. Bugnon, I.A. Whitehouse. ACOUSTIC DOPPLER CURRENT METER - IEEE Journal of OCEANIC INGINEERING, 1991, vol. 16, N 4, p. 420-426.
5. Y. Kuroda, G. Kai. K.Okuno. DEVELOMENT OF A SHIPBOARD ACOUSTIC DOPPLER CURRENT PROFILER - IEEE Journal of OCEANIC INGINEERING, 1988, p. 353-358
6. K. V. Jorgenson, B.L. Grose, F.A. Crandal. DOPPLER SONAR APPLIED TO PRECISION UNDERATER NAVIGATION. - OCEAN-93, vol. 2, p. 469-474 - прототип.
Изобретение относится к подводной технике и может быть использовано при создании доплеровских измерителей скорости движения объектов относительно дна или среды. Приемный тракт содержит последовательно соединенные антенну, блок аналоговой обработки, аналого-цифровой преобразователь, буферное оперативное запоминающее устройство, блок выделения доплеровской частоты, а также контроллер, управляющий режимом накопления, которое обеспечивается с минимальной частотой дискретизации. Достигаемый технический результат - увеличение быстродействия приемного тракта доплеровского лага при обработке коротких импульсных сигналов за счет формирования и ускоренной обработки длинных квазикогерентных записей эхосигналов. 2 ил.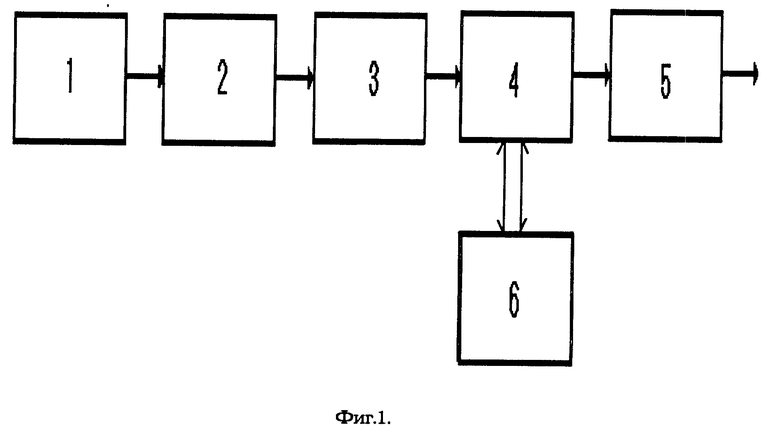
Приемный тракт импульсного высокоточного доплеровского лага, содержащий последовательно соединенные антенну, блок аналоговой обработки, аналого-цифровой преобразователь и блок для выделения доплеровской частоты, отличающийся тем, что в приемный тракт между аналого-цифровым преобразователем и блоком выделения доплеровской частоты дополнительно введено буферное оперативное запоминающее устройство для накопления промежуточных данных и подключенный к нему контроллер, управляющий режимом накопления и обеспечивающий формирование в буферной памяти из серии отраженных сигналов малой длительности одной квазикогерентной записи, длительность которой устанавливается заданным частотным разрешением, причем накопление обеспечивается с минимальной частотой дискретизации.
| Jorgenson K.V., Grose B.L., Crandal F.A., Doppler sonar applied to precision underwater navigation, OCEAN-93, vol 2., p | |||
| Прибор для раскрывания парашюта на желаемом расстоянии от места спуска | 1922 |
|
SU469A1 |
