Изобретение относится к гидроакустике и может быть использовано при разработке гидроакустических навигационных систем повышенной точности, работающих при наличии отражающих границ раздела, т.е. при волноводных условиях распространения.
Известна гидроакустическая дальномерная навигационная система [1], состоящая из М гидроакустических маяков-ответчиков, устанавливаемых в районе работы объекта навигации и размещенных на объекте гидроакустического передатчика, опрашивающего маяки-ответчики на частоте fо, М-канального приемника, принимающего ответы маяков-ответчиков на частотах f1, f2, ..., fм, и вычислителя координат объекта навигации.
В дальномерной навигационной системе такого типа координаты определяются по набору дистанций, каждая из которых определяется через измеренное время задержки ответа t по формуле r = Ct/2, где: С - средняя скорость звука для заданного района работы.
Недостатком такой навигационной системы является большая погрешность определения координат, связанная с непостоянством скорости звука в реальной морской среде, а также с явлением многолучевости распространения звука при наличии отражающих границ раздела.
Наиболее близким к предлагаемому техническим решением является гидроакустическая навигационная система [2], содержащая донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенные на объекте навигации гидроакустический передатчик, вход которого соединен с выходом генератора синхроимпульсов, М-канальный приемник, выходы которого подключены к входам М измерителей времени распространения гидроакустических сигналов до приемоответчика, работающего на частоте этого канала и обратно, вторые входы которых соединены с выходом генератора синхроимпульсов, N (по числу видов возможных траекторий лучей в каждом из М каналов) блоков преобразования временных интервалов в дистанции, входы которых подключены к выходу измерителя времени распространения соответствующего канала, и блок выбора максимального значения дистанции, вход которого подключен к выходам N блоков преобразования временных интервалов в дистанции данного канала, а выходы блоков выбора максимального значения дистанции всех М каналов соединены с входами вычислителя координат объекта навигации.
Включение в навигационную систему N блоков преобразования измеренных временных интервалов в дистанции в каждом из приемных каналов позволяет учесть в рамках какой-либо расчетной модели, например лучевой, как рефракцию лучей, связанную с непостоянством скорости звука, так и многолучевость процесса распространения, связанную с наличием отражающих границ раздела.
Недостатком такой навигационной системы также является достаточно большая погрешность определения координат, связанная с тем, что используется при обработке только часть информации о времени прихода сигнала, а именно, его переднего фронта, а также с определенной вероятностью появления помехи в канале приема, которая будет воспринята как полезный сигнал, если время ее прихода меньше времени прихода полезного сигнала. В этом случае измеритель времени распространения, который срабатывает от первого из принятых сигналов, зафиксирует время прихода, отличающееся от реального, что в конечном счете приведет к неконтролируемой погрешности определения координат объекта.
Цель изобретения - разработать такую гидроакустическую синхронную дальномерную навигационную систему, позволяющую уменьшить погрешность определения координат объекта навигации.
Для этого в гидроакустической синхронной дальномерной навигационной системе, содержащей донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, М-канальный приемник, М измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно, M˙ N блоков преобразования временных интервалов в дистанции по N в каждом из М каналов, М блоков выбора максимального значения дистанций из N значений и вычислитель координат объекта навигации, введены в каждый из М каналов N-1 дополнительных измерителей времени распространения, N-1 мультивибраторов задержки, N-1 мультивибраторов строб-импульса, N-1 селекторов, причем первые входы N-1 измерителей времени распространения соединены с выходом генератора синхроимпульсов, вторые входы соединены с первыми выходами соответствующих селекторов, а выходы - c N˙M входами блока преобразования временных интервалов в дистанции, первый вход каждого из селекторов соединен с выходом соответствующего мультивибратора строб-импульса, второй вход - с выходом соответствующего канала приемника, вход первого мультивибратора задержки соединен с выходом соответствующего канала приемника, а вход каждого последующего мультивибратора задержки соединен с вторым выходом соответствующего селектора.
В каждый из М каналов введены по числу видов N лучевых траекторий N˙(N - 1) дополнительных блоков преобразования временных интервалов в дистанции, N-1 блоков выбора максимального значения дистанции и усреднитель дистанций, причем входы каждого из N-1 наборов по N блоков преобразования временных интервалов в дистанции соединены с соответствующими выходами N-1 дополнительных измерителей временных интервалов, а выходы - с входами N-1 блоков выбора максимального значения, выходы всех блоков выбора максимального значения соединены с N входами усреднителя дистанций, а выход усреднителя дистанций соединен с входом вычислителя координат объекта навигации.
Такое конструктивное исполнение гидроакустической синхронной дальномерной навигационной системы позволило при многолучевом распространении сигнала принимать приемником целую серию импульсов, каждый из которых соответствует одной из возможных лучевых траекторий, и каждое из измеренных времен прихода этих импульсов ti,n может быть использовано для определения искомого расстояния. Эта избыточность информации и используется для уменьшения погрешности определения дистанции и координат объекта навигации.
Так, например, при использовании N импульсов, соответствующих различным лучевым траекториям, погрешность определения расстояния уменьшается в  раз в сравнении с прототипом.
раз в сравнении с прототипом.
При попадании в канал приема помехи, предшествующей появлению полезного сигнала, она также вызывает ложное срабатывание, однако, за последующие N-1 циклов селекции полезного сигнала он будет принят селектором и N-1 значение измеренных времен прихода ti,n будут использоваться для определения искомого расстояния. При усреднении всего набора N измеренных дистанций усреднителем 12i удельный вес одного ошибочного измерения будет существенно уменьшен, а погрешность измерения дистанции при наличии помехи будет уменьшена в N раз.
Для того, чтобы после прихода помехи полезный сигнал попал в интервал селекции τ1 его длительность должна равняться максимальному ожидаемому времени прихода полезного сигнала tмакс, увеличенному на время уширения сигнала за счет дисперсии
τ1 = tмакс(1 + Δ C/C); Δ C = Cгр - С, где: С - скорость звука в среде; Сгр - скорость звука в грунте.
Таким образом, предлагаемая навигационная система в новой совокупности существенных признаков по своим характеристикам превосходит по уровню техники известные аналогичные навигационные системы, а совокупность существенных признаков изобретения имеет причинно-следственную связь с достигнутым техническим результатом.
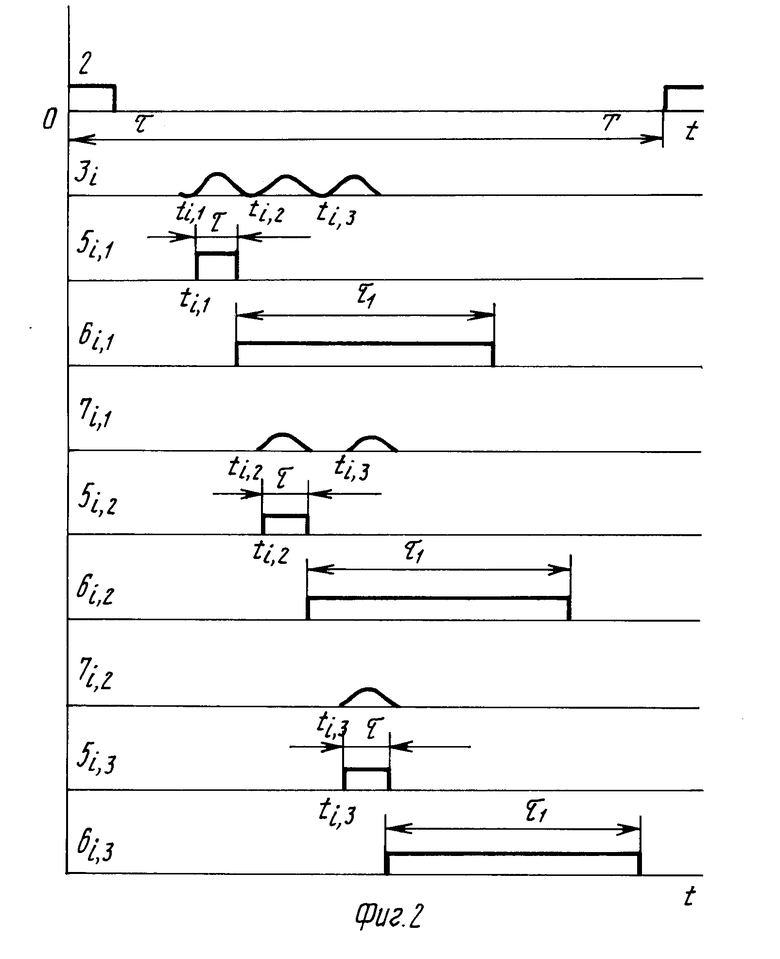
На фиг. 1 изображена структурная схема навигационной системы; на фиг. 2 показаны временные соотношения между принятыми сигналами и работа временных селекторов.
На фиг. 1, 2 показаны приемоответчики 1, i i-го канала, i = 1 - M; передатчик 2 акустических импульсов; М-канальный приемник 3; блок 4iизмерения времен распространения гидроакустических сигналов; измеритель 4i,n времени распространения n импульса в i-ом канале, n = 1 - N; мультивибратор 5i-K задержки i-го канала, K = 1 - (N - 1); мультивибратор 6i,k строб-импульса i-го канала, K = 1 - (N - 1); селектор 7i,K i-го канала, K = 1 - (N - 1); блок 8i,n выбора максимальных значений в i-ом канале, n = 1 - N; блок 9 преобразования временных интервалов в дистанции i-го канала; блок 9i(n,n') преобразования временного интервала в дистанцию для лучевой траектории n', n = 1 - N, n' = 1 - N; вычислитель 10 координат объекта; генератор 11 синхроимпульсов; усреднитель 12i дистанций.
Система работает следующим образом.
Генератор 11 синхроимпульсов запускает передатчик 2 акустических импульсов и обнуляет M . N измерителей 4i,n (i = 1 - M, n= 1 - N) времени распространения гидроакустических сигналов до приемоответчиков.
В момент запуска передатчик 2 излучает акустический сигнал запроса на частоте fo, который распространяясь в водной среде, принимается приемоответчиками 1i (i = 1 - M). Каждый из приемоответчиков излучает в момент прихода на него сигнала запроса акустический сигнал ответа на частоте fi (i = 1 - M). Сигналы, излученные приемоответчиками, распространяясь в воде, принимаются М-канальным приемником 3 гидроакустических сигналов. Каждый из каналов приемника 3i настроен на одну из частот f1 и принимает сигнал ответа, излученный соответствующим приемоответчиком 1i. Усиленные и продетектированные в приемнике сигналы с выхода каждого из каналов поступают в блок 4i измерения времени распространения гидроакустических сигналов.
Сигнал с первого выхода i-го канала приемника 3i поступает на запирающий вход измерителя времени 4i,1 и запирает своим передним фронтом интегратор от импульсов меток времени генератора 11 синхроимпульса в момент времени ti,1 (фиг. 2). В момент формирования генератором 11 синхроимпульсов следующего синхронизирующего импульса происходит передача в цифровом коде информации о числе меток времени, сосчитанных (накопленных) измерителем времени 4i,1, характеризующем величину времени распространения сигнала от объекта навигации до соответствующего приемоответчика и обратно по наикратчайшей траектории из N лучевых траекторий из первого интегратора в первые N блоков 9i(1,n') (n' = 1 - N) преобразования временного интервала ti,1 в дистанции τi , 1n'. Различные блоки преобразования 9i(1,n'), соответствующие различным n', преобразуют временной интервал ti,1 в N различных дистанций, соответствующих различным типам лучевых траекторий, каждая из которых характеризуется числом точек заворота или отражений от границ раздела. Найденные в блоках преобразования 9i(1,n') N значений дистанций τi,n' поступают на входы блока выбора максимального значения дистанций 8i,1, с выхода которого максимальное значение дистанции поступает на первый вход усреднителя 12i дистанций.
Сигнал со второго выхода i-го канала приемника 3i поступает на вход мультивибратора задержки 5i,1, который, открываясь, вырабатывает импульс задержки, длительность которого равна длительности излученного сигнала τ . Задний фронт этого импульса открывает мультивибратор строб-импульса 6i,1, который, открываясь, вырабатывает импульс, длительность которого τ1 определяется заранее с учетом максимальнaго уширения рабочего сигнала при его распространении за счет многолучевости. Строб-импульс длительностью τ поступает на первый вход селектора 7i,1 и открывает его. При поступлении с третьего выхода i-го канала приемника на второй вход селектора 7i,1 полезного сигнала на его выходе появится та часть полезного сигнала, которая лежит в интервале селекции τ1 , причем полезный сигнал с первого выхода селектора 7i,1 поступает на запирающий вход измерителя 4i,2 времени распространения и запирает его в момент времени ti,2 (фиг. 2), а со второго выхода - на вход мультивибратора задержки 5i,2 и открывает его на время τ. Задний фронт импульса мультивибратора задержки 5i,2 открывает мультивибратор строб-импульса, при этом продолжается процесс селекции оставшейся части полезного сигнала N раз по числу селектируемых возможных лучевых траекторий и соответствующих им времен распространения ti,n, n = 1 - N.
Все измеренные времена распространения ti,n поступают на входы соответствующих блоков преобразования временных интервалов в дистанции 9i (n, n'), в которых каждое значение ti,n преобразуется в набор возможных дистанций τi,nn'(n' = 1 - N), значения которых поступают на входы соответствующих блоков выбора максимальных значений 8i,n, с выходов которых все максимальные значения дистанций τi,n (n = 1 - N) поступают на соответствующие входы усреднителя 12i дистанций.
С выходов усреднителей дистанций 12i найденные значения средних дистанций поступают на вход вычислителя 10 координат объекта навигации.

Изобретение относится к гидроакустике, в частности к гидроакустическим навигационным системам, работающим при наличии отражающих границ раздела. Гидроакустическая синхронная дальномерная навигационная система содержит донную навигационную базу из M гидроакустических приемоответчиков с различными частотами ответа и размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, M-канальный приемник, M измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно, M N блоков преобразования временных интервалов в дистанции по N в каждом из M каналов, M блоков выбора максимального значения дистанции из N значений и вычислитель координат объекта навигации. В каждом из M каналов введены по числу N лучевых траекторий N-1 дополнительных измерителей времени распространения гидроакустических сигналов, N-1 мультивибраторов задержки, N-1 мультивибраторов строб-импульса, и N-1 селекторов. Кроме того, в каждом из M каналов введены N(N-1) дополнительных блоков преобразования временных интервалов в дистанции, N-1 дополнительных блоков выбора максимального значения дистанции и усреднитель дистанции. 2 ил.
ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА, содержащая донную навигационную базу из M гидроакустических приемоответчиков с различными частотами ответа и размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, M-канальный приемник, M измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно, M · N блоков преобразования временных интервалов в дистанции по N в каждом из M каналов, M блоков выбора максимального значения дистанции из N значений и вычислитель координат объекта навигации, отличающаяся тем, что в каждый из M каналов введены по числу лучевых траекторий N - 1 дополнительных измерителей времени распростанения гидроакустических сигналов, N - 1 мультивибраторов задержки, N - 1 мультивибраторов строб-импульса, N - 1 селекторов, причем первые входы N - 1 измерителей времени распространения соединены с выходом генератора синхроимпульсов, вторые входы соединены с первыми выходами соответствующих селекторов, а выходы соединены с N · M входами блока преобразования временных интервалов в дистанции, первый вход каждого из селекторов соединен с выходом соответствующего мультивибратора строб-импульса, второй вход соединен с выходом соответствующего канала приемника, вход первого мультивибратора задержки соединен с выходом соответствующего канала приемника, а выход каждого последующего мультивибратора задержки соединен с вторым выходом соответствующего селектора, в каждый из M каналов введена N(N - 1) дополнительных блоков преобразования временных интервалов в дистанции, N - 1 дополнительных блоков выбора максимального значения дистанции и усреднитель дистанции, причем входы каждого из N - 1 наборов по N блоков преобразования временных интервалов в дистанции соединены с соответствующими выходами N - 1 дополнительных измерителей временных интервалов, а выходы соединены с входами N - 1 дополнительных блоков выбора максимального значения, выходы всех блоков выбора максимального значения дистанции соединены с N входами усреднителя дистанций, а выход усреднителя дистанций соединен с входом вычислителя координат объекта навигации.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1978 |
|
RU713278C |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
