Изобретение относится к системам передачи и приема информации, смоделированным на линейной цепи и предназначенным, главным образом, для избежания столкновений. В линейной цепи, использующей изобретенное устройство, информационный сигнал предается последовательно по цепи от первого, идущего впереди всех объекта цепи, к последнему. Информация, посланная от первого объекта, передается назад каждым последующим объектом цепи, а каждый объект может интерпретировать и модифицировать посланный сигнал. В каждой точке цепи, объект может проанализировать передаваемый сигнал, чтобы получить информацию об условиях впереди данного объекта. Соответствующие действия могут затем быть предприняты оператором данного объекта.
Принципы, лежащие в основе изобретения.
К сегодняшнему дню было предложено много приборов для помощи водителю автомобиля во избежание столкновений. Одна сфера деятельности - это детекторы близости, полагающиеся на то, что амплитуда полученного сигнала свидетельствует о достижении некоторого минимального расстояния. Такие приборы требуют, чтобы ведущий автомобиль и автомобили, следующие за ним, обладали одним и тем же оборудованием. Эти приборы обычно используют вспомогательные излучатель и приемник, необходимые для определения относительного расстояния между ведущим и последующим автомобилями. Приборы этой природы основаны на том, что амплитуда передаваемой волны сможет включать систему предупреждения на следующем автомобиле. Например, идущая впереди машина излучает световые волны, и когда идущая следом машина воспринимает эти волны, включается сигнальное устройство, предупреждающее водителя этой машины об опасной близости к идущей впереди машине. Представленный патент в этой области - US Patent N 3892483, выданный Сауффереру 1 июля 1975 года. Сауфферер раскрывает информацию о приборе предупреждения о близости, предназначенном для автомобиля. Изобретенное устройство передает сигналы назад таким образом, что идущий следом автомобиль принимает волновой сигнал и прибор либо указывает на опасную близость, либо автоматически тормозит идущий следом автомобиль, чтобы избежать столкновения. Сауфферер основывается на детектировании волны и отслеживании амплитуды этой волны как величины, однозначно связанной с расстоянием между машинами.
Другая область деятельности связана с измерительными приборами, основанными на эффекте Доплера. Эти приборы являются автономными - они не требуют, чтобы другие автомобили обладали совместимыми устройствами. Такие приборы обычно используют волновой излучатель и приемник, расположенные на основной машине. Изучив световую волну и проанализировав отраженный сигнал, можно получить приблизительное расстояние между рассматриваемой машиной и каким-либо другим объектом. Когда достигается некоторое минимальное значение амплитуды отраженного сигнала, соответствующее наименьшему безопасному расстоянию, водитель данной машины получает сигнал предупреждения, или его (ее) автомобиль автоматически тормозится. Представительный патент в этой области - N 4833469, выданный Давиду 23 мая 1989 года. Давид раскрывает информацию о системе восприимчивости к малым расстояниям между объектами, которая использует эффект Доплера для предупреждения водителя о том, что тот приближается к объекту на слишком большой скорости. Последнее достигается путем определения скорости автомобиля относительно опасного объекта.
Обе описанные системы, а именно, детекторы близости и приборы, определяющие опасное расстояние измеренной скорости, использующие эффект Доплера, принимают во внимание только автомобили, находящиеся непосредственно впереди или позади данной машины. Эти устройства сконструированы с целью предупреждения водителя о том, что он, возможно, находится в неизбежной ситуации, основываясь на расстоянии до опасного объекта Такие системы являются реагирующими, а не предваряющими в том смысле, что они предупреждают водителя только после того как он оказался в опасной ситуации.
Во многих ситуациях знание условий об автомобиле, движущемся непосредственно перед данным, является достаточным. Это, разумеется, является целью тормозных фонарей и сигналов поворота. Однако одновременно с тем, что шоссе в стране становятся все более перегруженными, образуется все большее количество "цепочек". Эти цепочки, - название, перенятое из термина "цепные реакции", случаются, когда автомобили следуют в одной линии на близком расстоянии друг от друга. Именно в этих ситуациях аварии происходят с наибольшей вероятностью - в особенности, когда условия вождения очень плохи, как, например, в снегопад или в густой туман. В качестве примера, с 1981 по 1989 год 783 человека погибли на Калифорнийских шоссе в авариях, связанных с туманом. Ясно, что многие такие аварии можно было избежать, если бы каждый водитель в цепочке знал о действиях водителей, едущих впереди, не полагаясь на визуальную информацию, полученную в значительно ухудшенных условиях видимости.
Часто водитель, немедленно замечающий зажигание тормозного фонаря на движущемся впереди автомобиле, не осознает, что тормозной путь его (ее) машины может быть больше тормозного пути автомобиля, двигающегося впереди. Или, что встречается еще более часто, водитель впереди идущего автомобиля может увидеть опасную ситуацию и вовремя реагировать на нее; однако, водители, следующие за ним, заслонены и должны рассчитывать только на то, что тормозные огни идущего впереди автомобиля известят их о приближающихся неблагоприятных условиях. Эта проблема может быть проиллюстрирована ситуацией, в которой трактор или большой трейлер заслоняет вид условий, складывающихся перед ними. Например, если тормозит автомобиль перед трейлером, водитель машины, следующий за трейлером, должен ждать, пока водитель трейлера нажмет на тормоз, поменяет полосу движения или каким-либо другим способом узнает о необходимости торможения или объезда.
В цепочке задержка в ответе водителя водителю на сигнал торможения предшествующего автомобиля становится существенной. В среднем, мозгу требуется 0,25 с для наблюдения и анализа сложившихся условий и дополнительные 0,25 с для соответствующей реакции. Следовательно, каждый водитель в цепочке автомобилей добавляет 0,5 с к задержке в ответе на ситуацию. В цепи из пяти автомобилей последний водитель увидит зажигание тормозных огней предшествующего автомобиля не раньше, чем через 2 с после появления опасной ситуации. Однако если бы последний водитель в цепи имел возможность определять, тормозит ли каждый из предшествующих водителей в цепочке, и не только водитель машины, идущей непосредственно перед ним, водитель последней машины мог ожидать торможение, так что он (она) начал бы замедляться еще до наблюдения традиционного сигнала и необходимости торможения.
Во время неблагоприятных условий вождения, задержка в реакции становится еще более нежелательной. Описанные выше ситуации предполагали, что условия восприятия водителем не являются ухудшенными. Однако во время благоприятных условий вождения, таких как плохая погода, дым, пыль и т.д., способность водителя различать опасность значительно понижена. Более того, его возможности в наблюдении состояния предшествующего автомобиля также ухудшены. Кроме того, дорожные условия могут вызвать значительное увеличение тормозного пути по сравнению с тормозным путем в благоприятных условиях. Возможность предвидеть опасные условия путем получения информации, неподверженной задержкам, связанным с человеческой реакцией, и не допускающей влияния условий видимости, значительно снизила бы число случаев типа цепной реакции, одновременных столкновений большого количества машин, травм.
Поэтому, существует необходимость дистанционной системы раннего предупреждения для использования водителями и т.п. с целью обеспечения их информацией о действиях и условиях, происходящих перед ними. Информация о том, замедляются ли машины, движущиеся впереди по цепочке, позволяла бы водителю подготовиться к тому, чтобы избежать опасных условий, которые могли бы нанести ущерб собственности или травмировать людей.
Краткое описание изобретения.
Настоящее изобретение включает в себя метод, аппаратуру и устройство приема обработки и передачи электромагнитного сигнала сквозь ряд движущихся независимых элементов цепочки в существенно линейной цепочке элементов. Каждый элемент обладает блоком обработки, связанным с эмиттером (излучателем), детектором, предназначенным для обнаружения замедления данного элемента, а также замедления предшествующего элемента. Здесь раскрыта простая форма изобретения, в которой устройство детектирования торможения данного объекта включает в себя контрольное наблюдение инерциального сенсора или прибор замедления данного объекта. Средство детектирования торможения предшествующего элемента включает в себя мониторинг прибора, определяющего дальность передачи сигнала, такого как прибор на основе эффекта Доплера или прибор непосредственно измерения угла, например, частотно - и амплитудно-чувствительный фотоэлектрический детектор. Также раскрыта общая форма, в которой предшествующий элемент кодирует передаваемый сигнал так, что последний содержит информацию, относящуюся к торможению этого элемента и/или любых предшествующих элементов цепочки, от которых получается информация об их торможении. Чтобы усилить применяемость аппаратуры, предоставляется экран дисплея для демонстрации информации, содержащейся в сигнале. В заключение, раскрыта сложная форма, в которой закодированный сигнал содержит информацию о числе элементов цепочки, числе тормозящих элементов цепочки, длине цепочки элементов, средней скорости элементов и массе цепочки, а также другую неоперационную информацию, такую как характеристики машин, информацию о водителях и т.д. Более сложная дисплейная панель предоставляется с целью более адекватного представления сложной информации, содержащейся в сигнале.
Главной целью изобретения является обеспечение всех элементов в цепи элементов информацией, касающейся действий, предпринятых предшествующим элементом или условий, в которых они находятся. В простой форме каждый элемент - одноступенчатый бинарный эмиттер для передачи распознаваемого сигнала и соответствующий детектор. Эмиттер передает распознаваемый сигнал после: (1) обнаружения уменьшения относительной скорости предшествующего элемента; (2) получения через детектор распознаваемого сигнала, или (2) обнаружения уменьшения относительной скорости самого элемента. Таким способом все последующие элементы в цепи получают информацию о замедлении предшествующего элемента, даже если элемент непосредственно не виден или если движущийся непосредственно впереди элемент не замедляется. Характеристика, относящаяся к этой форме изобретения, лимитирует эффективную аппаратурную длину передачи/приема с тем, чтобы избежать перекрывание сигналов.
В общей форме, каждый элемент непрерывно излучает сигнал, кодирующий информацию об изменяющейся ситуации. В то время, как первый элемент приближается к второму, детектор первого элемента принимает сигнал. После этого блок обработки сигнала анализирует информацию, закодированную в этом сигнале. Четыре различных состояния отвечают следующим возможностям: первый переданный бит показывает, что второй элемент детектировал (не детектировал) замедление какого-либо предшествующего ему элемента; второй переданный бит указывает на то, что второй элемент начал (не начал) замедляться. Следовательно, имеются три различных вида информации: находится ли первый элемент в пределах достижимости сигнала, идущего от второго элемента; замедляется ли какой-нибудь элемент цепи, предшествующий второму; замедляется ли сам второй элемент.
В сложной форме каждый элемент испускает сигналы, содержащие "пакеты" информации методом бинарной передачи, используемым в цифровой передаче информации. Использование стандартного протокола позволяет передавать большие объемы информационных данных. Как говорилось выше, такие пакеты могут включать информацию о числе элементов в цепи, числе замедляющихся элементов цепи, длине цепочки элементов, средней скорости элементов, массе элементов, а также неоперационную информацию, такую как идентификационный номер машины, информацию о водителе и т.п. Подобная информация может найти применение как в персональной, так и в общественной сфере, например, в области охраны порядка.
Поэтому, система с предпочтительным воплощением изобретения включает в себя по крайней мере два элемента, оборудованных приборами, обменивающимися информацией и может преобразовать сигнал так, что его можно наблюдать на аудио/видео дисплее. Кроме того, каждый элемент может дополнять полученный сигнал, чтобы последующие элементы цепи получали сигнал с наиболее свежей закодированной информацией.
Метод, лежащий в основе изобретения, включает в себя передачу сигнала с закодированной информацией в направлении, прямо противоположном направлению движения первого элемента, прием с закодированной информацией, преобразование сигнала в подходящую звуковую и/или визуальную форму с одновременным дополнением и информации, содержащейся в сигнале, данными, характеризующими данный объект (если необходимо), и передачу полной информации в направлении, противоположном направлению движения второго элемента.
Таким образом, цель настоящего изобретения - это предоставление прибора для использования в системе, имеющей по меньшей мере два аппарата так, чтобы статус первого объекта передавался назад таким образом, чтобы он мог быть воспринят следующим за ним вторым элементом, после чего второй элемент получает и анализирует сигнал с информацией и передает его назад в направлении третьего элемента, с возможным дополнением информации о статусе второго элемента и т.д.
Целью данного изобретения является также создание метода, аппаратуры и системного устройства, устраняющих задержку во времени, связанную с человеческой реакцией на торможение движущегося впереди объекта или на стоящий впереди объект. Польза настоящего изобретения заключается в том, что обладая информацией о состоянии предшествующих элементов цепи, оператор данного элемента может быть лучше подготовлен к неблагоприятным условиям.
Другая цель данного изобретения - это создать канал информации, тянущийся от первого элемента цепочки к последующему. Будучи снабженным такой информацией, каждый элемент цепи может проанализировать информацию, содержащуюся в канале, и определить необходимость предпринятия конкретных действий.
Еще одной целью изобретения является обеспечение водителя вышеупомянутой информацией вне зависимости от условий видимости, значительно уменьшая, тем самым, необходимость полагаться на зрительное восприятие внешних условий, которое может быть сильно ухудшено в некоторых обстоятельствах.
Свойства данного изобретения позволяют известить оператора объекта о том, что сформировалась цепочка и что данный объект является частью этой цепочки; о том, что, по крайней мере, один элемент цепочки может замедляться; и/или что непосредственно предшествующий объект замедляется.
Другое свойство нашего изобретения дает возможность первому объекту обладать направленным назад источником света, желательно голубого цвета, для извещения следующего за ним объекта, возможно не обладающего изобретенным устройством, о том, что объект, движущийся впереди первого объекта, тормозит и что необходимо быть готовым к торможению.
Еще одно свойство данного изобретения позволяет передавать и принимать дополнительную информацию, такую как число элементов в цепочке, число и характеристика тормозящих элементов цепочки, длина цепочки элементов, средняя скорость элементов, масса цепочки, а также неоперационную информацию, такую как идентификация автомобиля, данные о водителях и т.д. Эта информация, будучи обработанной микропроцессором, позволяет водителю сделать выводы о текущих условиях вождения, чего он (она) не смог бы сделать при отсутствии изобретенного устройства. Эта информация может в дальнейшем быть обработана микропроцессором для выдачи водителю дополнительных сведений, таких как рекомендуемое безопасное расстояние до идущей впереди машины.
Фиг. 1 является упрощенной иллюстрацией трех автомобилей, которые сформировали цепочку, а также статус лампочек на дисплейных панелях и состояние переднего сигнала;
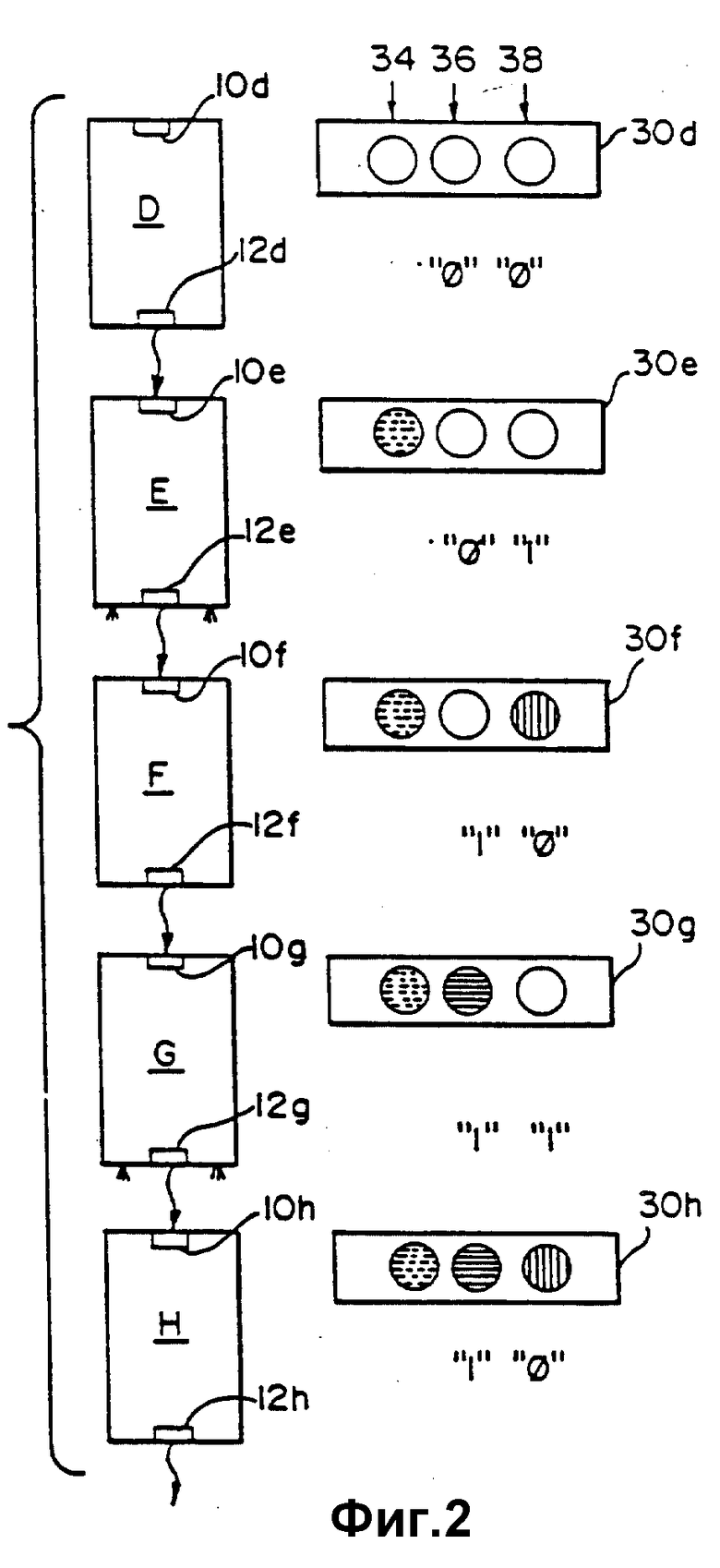
фиг.2 - это упрощенная иллюстрация пяти автомобилей, сформировавших цепочку, статуса лампочек на дисплейных панелях и состояния переданного сигнала;
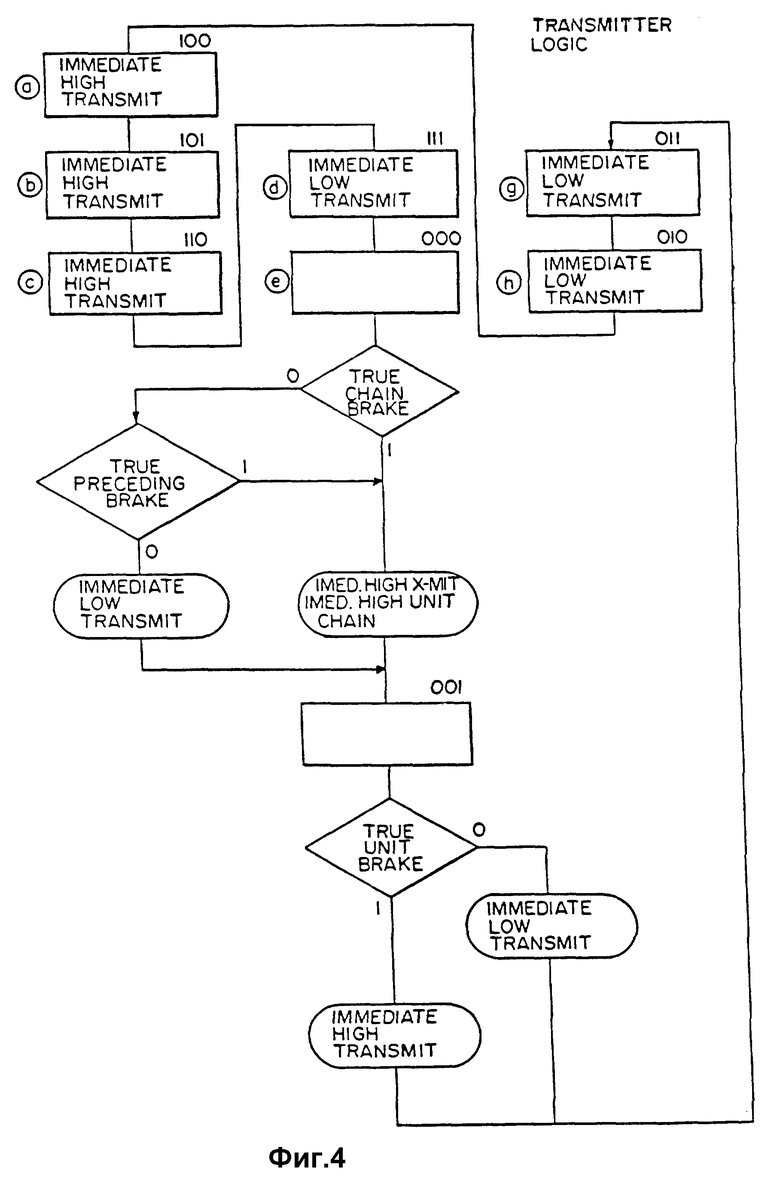
фиг. 3 - это логическая диаграмма алгоритмического состояния передатчика в схеме предпочтительной реализации изобретения;
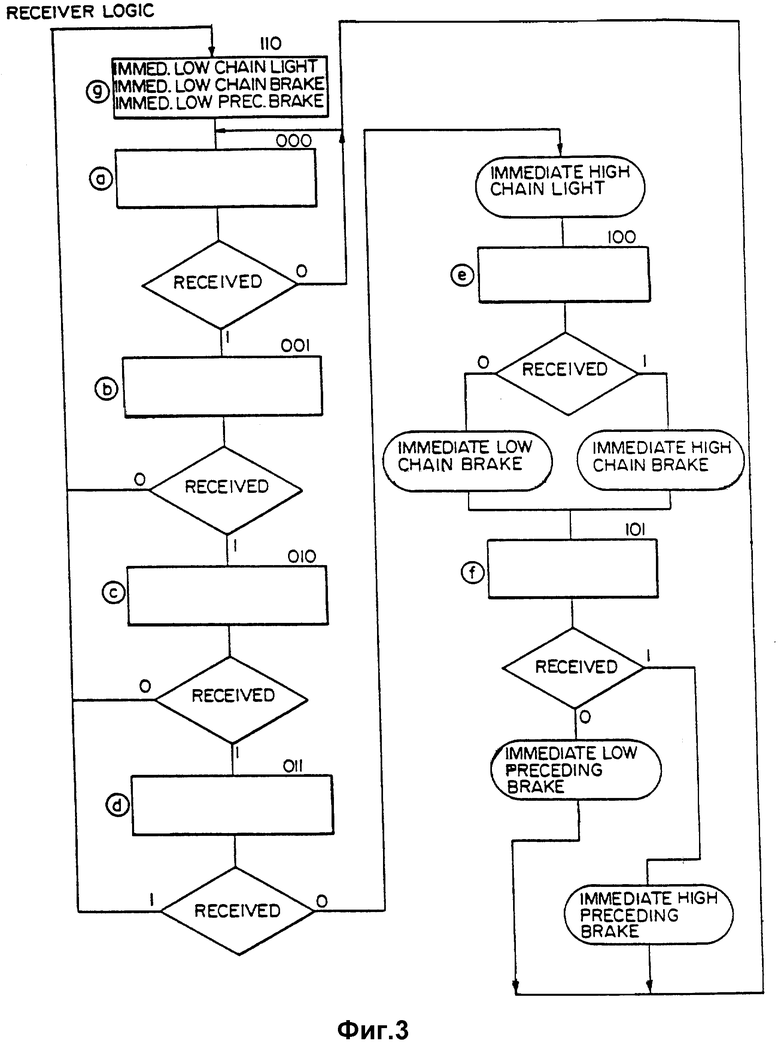
фиг. 4 - это логическая диаграмма алгоритмического состояния приемника в схеме предпочтительной реализации изобретения;
фиг. 5 - это схематическая диаграмма преобразовательного блока в схеме предпочтительной реализации изобретения.
Описание предпочтительных реализаций.
Генеральная реализация настоящего изобретения может быть охарактеризована как подвижный объект или автомобиль с установленным в нем эмиттером, детектором, индикатором замедления, процессором и индикатором приборной панели. В этой реализации эмиттер сконструирован так, чтобы он производит узконаправленный радиочастотный сигнал. Частота сигнала выбрана очень высокой, в то время, как выходная мощность выбрана очень низкой. Высокая частота необходима для улучшения направленности сигнала так, чтобы сигнал распространялся внутри относительно малого угла, а низкая мощность на выходе нужна для того, чтобы эффективный радиус передачи сигнала был приблизительно равен шести длинам машины. Радиочастотные сигналы выбраны в качестве формы передачи и приема информации, т.к. они не ослабляются во время неблагоприятных условий вождения, в отличие от световых волн. Направление усиления сигнала существенно противоположно направлению поступательного движения автомобиля, так что только машины в существенной линейной цепочке будут обмениваться информацией, а не машины, движущиеся рядом с цепочкой.
Детектор, так же как и эмиттер, сконструирован так, чтобы он обладал наибольшей чувствительностью в направлении, существенно вдоль поступательного движения автомобиля, для получения радиочастотных сигналов, переданных оборудованным эмиттером автомобилем, следующим впереди данного автомобиля в радиусе передачи сигнала. Индикатор замедления выдает информацию, относящуюся к уменьшению скорости автомобиля и непосредственно связан с тормозной системой. Блок обработки сигнала соединен с эмиттером, детектором и индикатором замедления и служит для интерпретации входного сигнала, обеспечения водителя автомобиля информацией, относящейся к автомобилям, предшествующим данному, через индикатор приборной панели, и дополнения входного сигнала соответствующей информацией для последующей передачи через эмиттер.
В цепочке автомобилей, изображенной на фиг. 1, индикатор приборной панели 30а-с показывает водителю автомобиля информацию о его (ее) автомобиле (находится ли он (она) в цепочке), о машине, движущейся непосредственно перед ним, (если водитель этой машины нажал на тормоз), и о других машинах, находящихся впереди по цепи, (если произошло торможение какой-либо из них, не связанное с идущим непосредственно впереди автомобилем). Вышеупомянутые условия показаны лампочками 34, 36 и 38 на каждом индикаторе приборной панели 30.
Лампочка "Цель сформирована" 34, которая может быть белой, извещает водителя о том, является ли он частью цепочки машин, состоящей по меньшей мере из трех машин. Лампочка "Торможение в цепи" 36, которая может быть голубой, извещает водителя, что водитель какой-то машины впереди той, что следует непосредственно перед данной, нажал на тормоз и что может быть необходимо проявить осторожность, особенно, если опасность еще не определена. Лампочка "Тормоз" 38, которая может быть красной, извещает водителя о том, что тормозится непосредственно предшествующий автомобиль.
На фиг. 1 также показано состояние информации, переданной эмиттерами 12а-с. Эмиттеры 12а-с передают сигнал информации, включающий в себя в данной реализации четырехбитный заголовок (1110), служащий для квитирования установления связи, за которым следуют два бита информации, а затем двухбитный ограничитель, либо сигнализирующий конец передаваемой информации, либо говорящий об обнаружении и/или исправлении ошибки, например, код Хамминга. Что касается двух бит переданной информации, первый из них относится к "Торможению в цепи", а второй - к "Торможению". Блок преобразователя 20 контролирует, какие данные из сигнала, полученного из приемника 10а-с, и информации, полученной от самого автомобиля, посылаются к эмиттеру 12а-с. Ниже описаны логические операции, выполненные блоком преобразователя 20 во время передачи закодированного сигнала.
Переданному биту 1 дается нижнее значение (значение "0"), если не выполнено одно их двух условий: детектор 10 получает правильный заголовок, что означает, что принимающий сигнал автомобиль находится в цепочке; и верхнее значение бита 1 (означающее, что, по крайней мере, один водитель, помимо непосредственно предшествующего, тормозит), или детектор 10 получает правильный заголовок (что означает, что принимающий сигнал автомобиль находится в цепочке) и верхнее значение бита 2 (означающее, что водитель автомобиля непосредственно впереди тормозит). Бит 2 по умолчанию принимает нижнее значение до тех пор, пока не нажаты тормоза данного автомобиля.
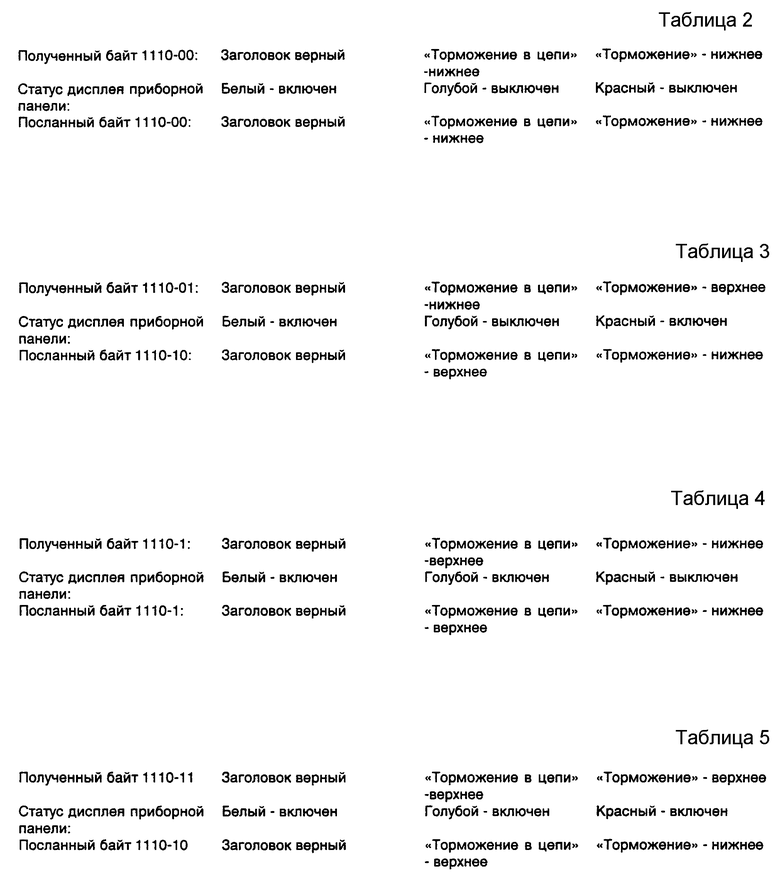
Ниже представлены различные информационные состояния, которые могут быть переданы автомобилем. Также показаны статус полученного сигнала и состояния дисплея приборной панели 30 после получения сигнала. Для простоты, заканчивающие биты опущены, а биты заголовка отделены дефисом от битов данных (см. табл. 1).
Детектор не получил подходящего сигнала. Это означает, что либо водитель находится вне эффективного радиуса передачи/приема сигнала от следующего непосредственно впереди автомобиля, оборудованного изобретенным прибором, либо предшествующий автомобиль не оснащен изобретенным устройством. Следовательно, если только водитель не нажимает на тормоз (и поэтому удовлетворяется условие для посылки бита 2 в положение "вернее"), в излученном сигнале оба бита находятся в положении "нижнее". Следует заметить, что "0000" выбрано для простоты. Любая комбинация битов, отличная от верной, т.е."1110", может быть принята, но не будет рассматриваться как верный заголовок (см. табл. 2).
Детектор получил подходящий заголовок, означающий, что водитель находится в цепочке; впереди него ни один водитель в цепочке не тормозит, сам водитель тоже не тормозит. Если бы сам водитель тормозил, посылаемый сигнал выглядел бы как 1110-11 (см. табл. 3).
Детектор получил подходящий заголовок, так что водитель движется в цепочке; ни один водитель впереди непосредственно предшествующего автомобиля не тормозит; непосредственно предшествующий автомобиль тормозит; и сам водитель еще не тормозит. Если бы сам водитель нажал на тормоз, передаваемый сигнал был бы 1110 -11 (см. табл.4).
Детектор получил подходящий заголовок, свидетельствующий о том, что водитель попал в цепочку; впереди по цепи водитель автомобиля, отличного от непосредственно предшествующего, тормозит; сам водитель не тормозит. Если бы он тормозил, передаваемый сигнал был бы 1110 -11 (см. табл. 5).
Детектор получил подходящий заголовок, указывающий на то, что водитель находится в цепочке; впереди по цепи водитель автомобиля отличного от непосредственно предшествующего, тормозит; водитель непосредственно предшествующего автомобиля тормозит. Если бы сам водитель тормозил, передаваемый сигнал был бы 1110-11.
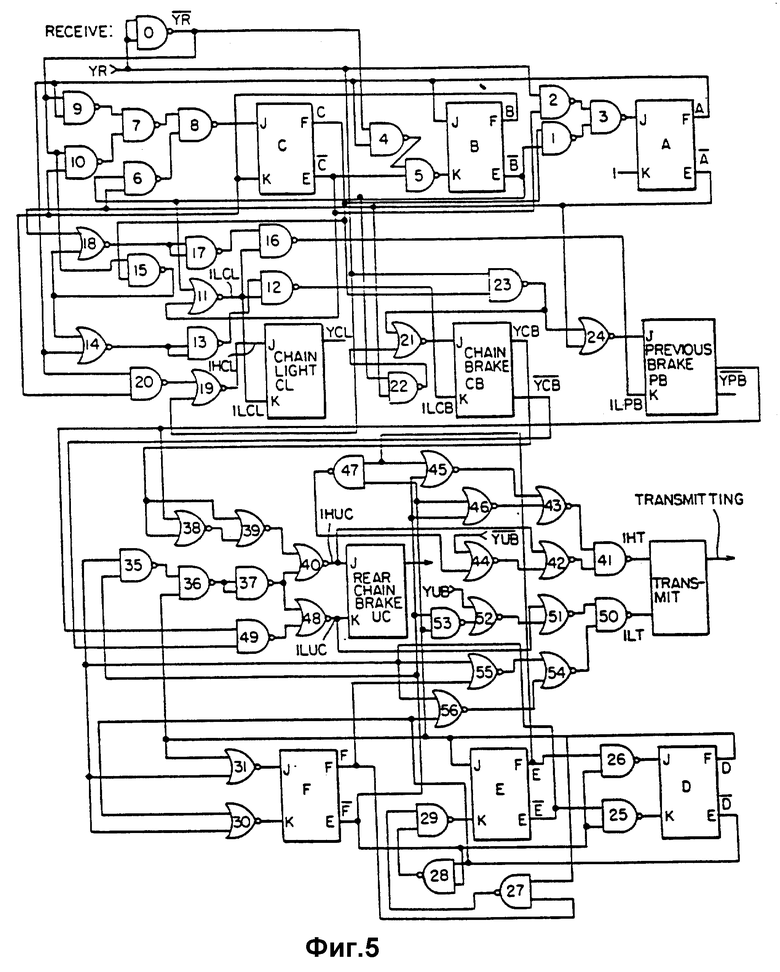
Из сказанного выше становится ясно, что блоком преобразователя выполняются две функции - контроль дисплея и контроль эмиттера. Фиг. 3 и 4 показывают логические операции, совершаемые блоком преобразователя 20. Трехзначные числа представляют собой различные состояния, с которыми должен работать блок 20. Показанные логические операции позволяют спроектировать и сконструировать подходящую электронику для исполнения функций, требуемых данным изобретением. Фиг. 5 представляет собой простой проект, выполняющий логические операции, используя готовые к употреблению НЕ-И и НЕ-ИЛИ логические элементы и триггеры. Триггеры A, B, и C представляют собой входные логические элементы, триггеры C, CB и PB являются элементами памяти для "Цель сформирована", "Торможение в цепи" и "Торможение". Триггеры D, E и F представляют собой выходные логические элементы. Триггер UC представляет собой контрольный логический элемент для укрепленного сзади фонаря, который будет обсуждаться ниже.
Обращая теперь внимание на более сложный пример, мы замечали, что на фиг. 2 первый автомобиль D находится впереди всех других машин и поэтому не может получить подходящего заголовка. Следовательно, на дисплее 30d ни одна лампочка загореться не может. Кроме того, водитель автомобиля Д не тормозит, так что передаваемый байт - "110-00".
Второй автомобиль Е с помощью детектора 10e получает сигнал, переданный эмиттером 12d. После обработки сигнала блоком преобразователя 20е, дисплейная панель 30е автомобиля Е включается и загорается лампочка 34 "Цель сформирована". Так как полученные биты 1 и 2 - нижнее, ни лампочка 36 "Торможение в цепи", ни лампочка 38 "Торможение" не горят. Водитель автомобиля Е, однако, определил, что замедление и/или торможение необходимо и поэтому нажал на педаль тормоза. Следовательно, блок преобразователя 20е дает команду эмиттеру 12е послать бит 2 в положении "верхнее", т.е. сигнал в виде "01", чтобы показать, что водитель данного автомобиля нажал на тормоз.
Автомобиль F получает заголовок "1110" и сигнал информации "01", и блок преобразователя определяет, что автомобиль находится в цепочке, т.к. получен верхний заголовок, и что ни один автомобиль, идущий впереди автомобиля Е, не тормозит, т.к. бит 1 был получен в положении "нижнее". Более того, блок 20f определяет, что водитель автомобиля Е тормозит, т.к. бит 2 был получен в положении "верхнее". Поэтому на контрольной панели 30f зажигаются лампочки 34 "Цепь сформирована" и 38 "Торможение". Одновременно, блок преобразователя 20f посылает бит 1 в положении "верхнее", т.к. одно из условий для этого выполнено: блок преобразователя 20f получил заголовок и бит 2 в положении "верхнее". Так как водитель автомобиля F не нажал на тормоз, бит 2 передается в положении "нижнее".
Автомобиль G получает заголовок "1110" и информационный сигнал "10", и блок обработки сигнала 20g определяет, что автомобиль является частью цепочки, т. к. он получил верный заголовок, и что по крайней мере один водитель перед автомобилем F тормозит, т.к. бит 1 получен в положении "верхнее". Более того, блок определяет, что водитель автомобиля F тормозит, т.к. бит 2 получен в положении "нижнее". В свою очередь, блок обработки сигнала 20g вызывает занижение лампочек "Цель сформирована" и "Торможение в цепи" на панели 30g и посылает бит 1 в положении "верхнее", т.к. выполнено одно из условий, необходимых для этого: блок обработки сигнала 20g получил бит 1 в положении "верхнее". А так как водитель автомобиля G нажал на тормоза, бит 2 передается в положении "верхнее".
Наконец, автомобиль Н, последний в цепочке, получает заголовок "1110" и информационный сигнал "11", а блок обработки сигнала 20h определяет, что автомобиль является частью цепочки, т.к. получен правильный заголовок, что по крайней мере один водитель впереди непосредственно предшествующего автомобиля тормозит, и что водитель автомобиля G также нажал на тормоз. Следовательно, блок обработки сигнала 20h вызывает зажигание всех трех лампочек на контрольной панели 30h и посылает бит 1 в положении "верхнее" и бит 2 - в положении "нижнее" (т.к. водитель автомобиля G еще тормозит).
Следует заметить, что водитель автомобиля Н узнает о замедлении автомобиля Е, как только водитель автомобиля Е нажимает на тормоз. Водитель автомобиля Н не должен ждать, когда водители автомобилей G и F нажмут на тормоза, чтобы узнать о существовании потенциально опасной ситуации на дороге. В цепочке из 10 автомобилей, в которой первый автомобиль тормозит, настоящее изобретение обеспечит водителя, оказавшегося в конце цепочки, информацией об этом торможении на четыре секунды раньше, чем если бы все основывалось на цепочке человеческих реакций.
Предшествующая дискуссия была главным образом направлена на ситуацию, когда много автомобилей движется с высокой скоростью на близком расстоянии друг от друга. Однако предпочтительная реализация изобретения также дает улучшенное средство обнаружения заглохшей на дороге машины, оборудованной изобретенным устройство при условии, что зажжены аварийные фонари. Чтобы лучше проиллюстрировать этот случай, мы рассмотрим следующий пример.
Выведенный из строя автомобиль находится частично на краю дороги. Водитель временно покинул автомобиль, чтобы вызвать помощь. Предположим, что дороги скользкие и погода туманная с видимостью менее 50 м. Водитель включил аварийные мигающие фонари, вызвав, таким образом, посылаемые блоком обработки сигнала бита 2 в положении "верхнее". К тому же, включение аварийных фонарей вынуждает радиочастотный усилитель изобретенного устройства увеличить выходную мощность, таким образом, увеличивая дальность передачи сигнала.

Изобретение относится к системам предупреждения столкновений и может быть использовано для обмена информацией в движущейся линейной цепи транспортных средств. Каждый объект в линейной цепи содержит блок обработки информации, соединяющий друг с другом направленный приемный элемент, направленный передающий элемент малой мощности, детектор торможения данного объекта и детектор замедления предшествующего ему. Цветовая сигнализация передается по цепочке назад, то есть в направлении, противоположном направлению движения. 4 с. и 18 з.п.ф-лы, 5 табл., 5 ил.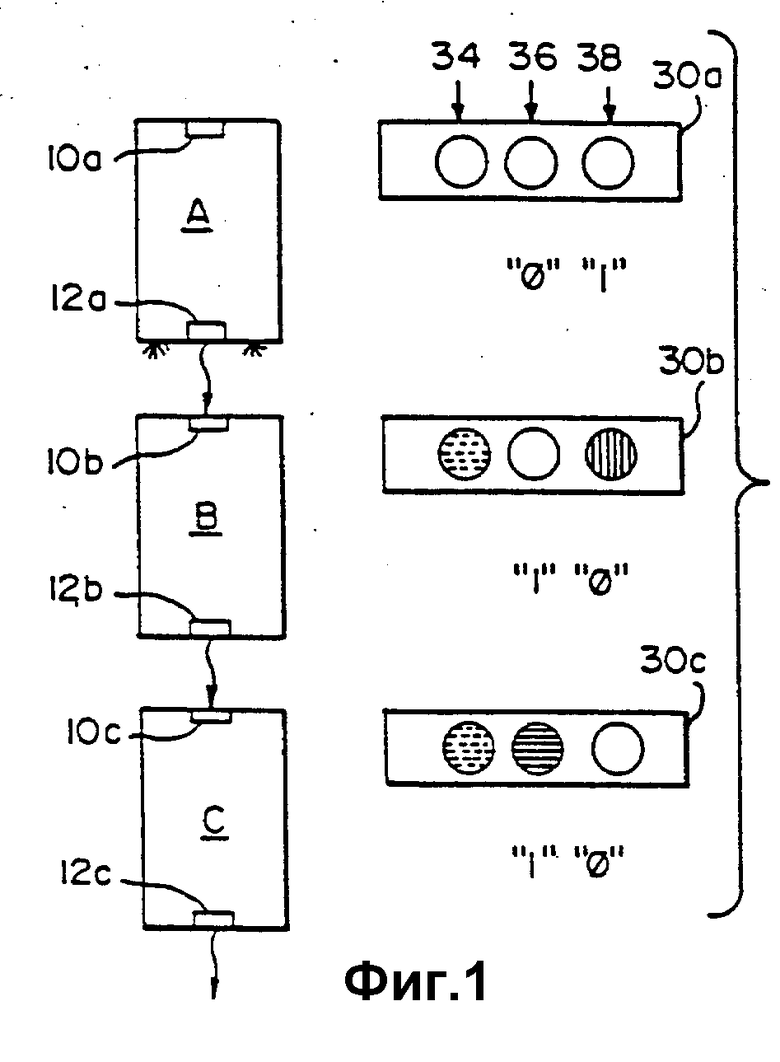
| US, патент, 4893112, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
