Предлагаемое изобретение относится к измерительной технике и, в частности, может быть использовано в измерителях коротких расстояний.
Известен способ ультразвукового импульсного измерения расстояния [1], реализуемый устройством, заключающийся в следующем.
1. Посылают ультразвуковой импульс в направлении поверхности, до которой измеряется расстояние.
2. Размещают на эталонном расстоянии по направлению к исследуемой поверхности отражатель ультразвука.
3. Принимают отраженный сигнал от отражателя в точке посылки.
4. Измеряют первое суммарное время распространения прямого и отраженного импульсных сигналов от точки посылки до отражателя и обратно.
5. Определяют количество эталонных расстояний между излучателем и поверхностью, до которой измеряется расстояние, по первому измеренному времени и моменту возвращения ультразвукового импульса от поверхности.
Отметим следующие достоинства этого способа.
Пассивный характер сигнала возврата в этом способе измерения не приводит к возникновению паразитных влияний отраженного сигнала на принимаемый. Влияние нестабильности ультразвука на точность измерения расстояния в предлагаемом способе исключается за счет введения стабильного эталонного расстояния. Нестабильность скорости распространения ультразвука будет в равной степени влиять на времена прохождения ультразвуковым импульсом эталонного и измеряемого расстояний. Влияние длительности генерируемых отраженных импульсов в этом способе исключается из-за возможности организации измерений интервалов времени между передними фронтами генерируемых и принимаемых импульсов.
Известный способ не позволяет измерить расстояние до малогабаритных объектов, т.к. основан на использовании пассивного отраженного сигнала. Пассивный характер отраженных сигналов не позволяет получить заметный отраженный сигнал от малогабаритных объектов незначительной отражающей способности.
Для измерения больших расстояний (десятки, сотни километров) до крупногабаритных объектов этот способ также неприемлем из-за большого затухания пассивно отраженных сигналов.
Другим недостатком способа является ограниченная эталонным расстоянием точность измерения, что приводит к росту погрешности измерения с уменьшением измеряемого расстояния.
Наиболее близким к предлагаемому по технической сущности и достигаемому техническому эффекту является способ измерения расстояния, изложенный в [2]. Способ осуществляют следующим образом.
1. Посылают импульсный сигнал из точки отсчета к объекту со скоростью распространения Un и длительностью t1.
2. Принимают сигнал на объекте через время td.
3. Формируют на объекте импульсный сигнал из принятого длительностью t2.
4. Задерживают сформированный сигнал на объекте на время t2+tx, где tx - время внутренней обработки.
5. Из задержанного сигнала формируют первый ответный сигнал и посылают его в точку отсчета.
6. Из первого ответного сигнала формируют второй задержанный сигнал на время t2 + tx и посылают его в точку отсчета.
7. Принимают первый и второй ответные сигналы в точке приема.
8. Измеряют первое суммарное время tA между задними фронтами сигнала посылки и первого ответного сигнала.
9. Измеряют второе время tB между задними фронтами первого и второго ответных сигналов.
10. Вычисляют расстояние до объекта по первому и второму суммарным временам и скорости распространения сигналов.
Достоинством этого способа является то, что он применим для измерения больших расстояний (десятки, сотни километров) до быстро перемещаемых объектов (самолеты, ракеты и т.п.) с использованием сигналов, распространяемых со скоростью света (радиоимпульсы, лазерные импульсы и т.д.). Применение этого способа на базе радиоизлучений на коротких расстояниях (десятки, сотни метров), а также для малогабиратных объектов, практически, невозможно из-за трудностей измерения весьма коротких интервалов времени.
Применение в качестве рабочих сигналов ультразвуковых импульсов обеспечивает точное измерение интервалов, обусловленное значительным увеличением их ширины. Но нестабильность скорости ультразвука (она зависит от температуры среды, от ее химического состава и т.п.) не обеспечит точного вычисления расстояния.
Известный способ основан на применении одного и того же вида импульсного излучения при формировании сигналов посылки и возврата. При измерении коротких расстояний этот недостаток затрудняет устранение паразитных взаимных влияний между сигналами посылки и возврата по одним и тем же цепям в точке отсчета и на объекте из-за необходимости генерации на объекте весьма узких импульсов. Общность природы сигналов посылки и возврата приводит к появлению паразитных влияний. При измерении коротких расстояний этот недостаток затрудняет измерения.
Первой технической задачей, решаемой изобретением, является исключение взаимного влияния сигналов посылки и возврата, обусловленное их различной физической природой.
Второй технической задачей, решаемой изобретением, является исключение влияния нестабильностей скоростей распространения импульсных сигналов на точность измерения расстояния.
Третьей технической задачей, решаемой изобретением, является исключение влияния нестабильностей длительностей импульсов сигналов посылки и возврата на точность измерения расстояния.
Технические результаты, достигаемые с помощью данного изобретения - расширение области применения способа за счет обеспечения возможностей измерения как больших, так и малых расстояний, измерение расстояний до объектов с различными габаритами, а также простота реализации способа и высокая точность измерения.
Первая и вторая представленные задачи решаются тем, что в известном способе измерения расстояния до объекта, включающем посылку импульсного сигнала из точки отсчета, прием его на объекте, формирование на объекте по принятому сигналу посылки импульсного сигнала возврата, передачу его в точку отсчета и вычисление расстояния до объекта, в качестве импульсных сигналов посылки и возврата выбирают излучения разных видов, выбирают скорость распространения сигнала возврата меньшей или равной скорости распространения сигнала посылки.
Формирование импульсного сигнала возврата осуществляют в пределах длительности принятого сигнала посылки, дополнительно передают сигнал возврата в точку приема, отстоящую от точки отсчета на базовое расстояние в направлении объекта, измеряют первое и второе суммарные времена распространения сигналов посылки и возврата, определяют время прохождения сигналом посылки базового расстояния, вычисление расстояния до объекта осуществляют по базовому расстоянию, первому и второму суммарным временам распространения сигналов и времени прохождения сигналом посылки базового расстояния.
Третья задача решается тем, что формирование импульсного сигнала возврата осуществляют по переднему фронту принятого на объекте импульсного сигнала посылки, а измерение первого и второго суммарных времен распространения сигналов ведут между передним фронтом сигнала посылки в точке отсчета и передними фронтами сигналов возврата, принятых в точках отсчета и приема.
Сопоставительный анализ заявляемого изобретения с прототипом показывает, что предлагаемый способ отличается от известного наличием следующих признаков:
1. В качестве импульсных сигналов посылки и возврата выбирают излучения разных видов.
2. Выбирают скорость распространения сигнала возврата меньшей или равной скорости распространения сигнала посылки.
3. Формирование импульсного сигнала возврата осуществляют в пределах длительности принятого сигнала посылки.
4. Дополнительно передают сигнал возврата в точку приема, отстоящую от точки отсчета на базовое расстояние в направлении объекта.
5. Измеряют первое и второе суммарные времена распространения сигналов посылки и возврата, т.е. t1 и t2 соответственно.
6. Определяют время прохождения сигналом посылки базового расстояния.
7. Вычисление расстояния D до объекта осуществляют по базовому расстоянию, первому и второму суммарным временам распространения сигналов и времени прохождения сигналом посылки базового расстояния, т.е. d/Un.
8. Формирование импульсного сигнала возврата осуществляют по переднему фронту принятого на объекте импульсного сигнала посылки.
9. Другой вариант осуществления способа предусматривает следующий прием. Измерение первого и второго суммарных времен распространения сигналов ведут между передним фронтом сигнала посылки в точке отсчета и передними фронтами сигналов возврата, принятых в точках отсчета и приема.
Таким образом, предлагаемый способ соответствует критерию изобретения "новизна".
Заявляемый способ измерения расстояния обладает более широкой областью применения, чем прототип, т.к. обеспечивает возможность измерения как больших, так и коротких расстояний. Различная природа сигналов посылки и возврата обеспечивает исключение влияния генерируемого импульсного сигнала возврата на каналы приема сигнала посылки. В результате отпадает необходимость в мерах защиты принимаемого сигнала посылки от вредного воздействия генерируемого сигнала возврата. Различная природа сигналов посылки и возврата позволяет генерировать импульсный сигнал возврата, не ожидая окончания приема импульсного сигнала посылки, в пределах длительности принимаемого сигнала посылки, что ведет к существенному упрощению процесса измерения (задержка не требуется). Различная природа сигналов посылки и возврата может использоваться по предлагаемому способу как при измерении больших, так и малых расстояний.
При измерении больших расстояний целесообразно выбирать Ub = Un, а величина Un должна быть большой Э (например, скоростью света).
Достаточная для получения высокой точности величина времен t1 и t2, при этом, будет обеспечена большой величиной измеряемого расстояния. При измерении коротких расстояний выбирают Ub < Un. В обоих случаях, как при измерении коротких расстояний, так и больших имеет место упрощение технической реализации способа.
Предложенный способ измерения расстояния обеспечивает большую простоту реализации по сравнению с прототипом. Заявленный способ обеспечивает также более высокую точность измерения по сравнению с прототипом.
Решение этой задачи на коротких расстояниях обеспечивает пониженная скорость сигнала возврата Ub по сравнению со скоростью сигнала посылки Un, и дополнительно введенная точка приема, отстоящая от точки отсчета на базовое расстояние d в сторону объекта, что позволяет повысить точность измерения суммарных времен распространения сигналов t1 и t2 за счет увеличения их величины.
Новая реализация вычисления расстояния D по формуле
позволяет исключить скорость Ub из вычисления расстояния и этим самым исключить из процесса измерения расстояния главный источник погрешности, обусловленный нестабильностью скорости Ub (температура, природа среды, давление и т.п.).
Хотя скорость распространения сигнала посылки Un входит в формулу вычисления D, однако, за счет малости расстояния d и большой величины Un интервал времени прохождения сигналом посылки базового расстояния d может быть выбран достаточно малым, и поэтому заметного влияния на измеряемое расстояние не вносит.
В прототипе скорость Ub входит в формулу вычисления
Путем выбора пониженной скорости Ub способ прототип можно применять и для измерения коротких расстояний. Однако, нестабильность скорости Ub в этом случае оказывает прямое воздействие на измеряемое расстояние и, следовательно, не позволяет добиться точности измерения D, которая обеспечивается предлагаемым способом.
Нестабильность скорости в предлагаемом способе не скажется на измеряемом расстоянии D, т.к. ее отклонения вызывают прямо пропорциональные отклонения времени t1 и t1-t2, входящих в числитель и знаменатель формулы.
Решение второй технической задачи при измерении больших расстояний выбор Ub=Un не препятствует. Формула вычисления расстояния при этом принимает вид
Помимо упрощения технической реализации процесса измерения при применении предлагаемого способа на больших расстояниях, имеет место также и повышение точности измерения расстояния из-за исключения скорости Un из процесса вычисления. Скорость Ub исключается благодаря приемам предлагаемого способа, а скорость Un исключается из-за того, что Ub=Un.
Таким образом, результатом решения второй технической задачи является высокая точность измерения расстояния D как на больших, так и на малых расстояниях.
Формирование импульсного сигнала возврата по переднему фронту принятого на объекте сигнала посылки и измерение первого и второго суммарных времен распространенных сигналов t1 и t2 между передними фронтами сигналов посылки в точке отсчета и передними фронтами сигналов возврата, принятых в точках отсчета и приема, решают третью техническую задачу: повышение точности измерения расстояния за счет исключения влияния длительности импульсов на суммарные времена распространения сигналов. Процесс измерения расстояния в способе прототипе базируется на равенстве и постоянстве длительностей импульсов, что является сложной и противоречивой задачей.
Формирование импульса возврата в пределах длительности принимаемого импульса посылки в совокупности с выбором разных видов сигналов обеспечивают новый недостижимый в других технических решениях результат, выраженный упрощением процессов развязки принимаемого сигнала посылки и генерируемого сигнала возврата и повышением точности измерения как больших, так и малых расстояний.
Другая совокупность признаков, связанная с выбором пониженной скорости Ub и исключением ее величины из процесса вычисления расстояния, обеспечивает повышение точности измерения расстояния по новой формуле.
Признак, связанный с введением разнесенного по двум точкам приема, используется в системах пространственно-временной обработки сигналов и т.п. (см., например, Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию: Перевод с английского, М.: Радио и связь, 1986, 448 с.), где применение разнесенного приема в двух точках, находящихся на известном расстоянии, позволяет исключить влияние сильного сигнала помехи на слабый полезный сигнал.
В сочетании с другими признаками предлагаемого способа этот признак обеспечивает новый положительный эффект: исключение из вычислительного процесса величины нестабильной скорости возврата согласно вышеприведенной формулы. Положительный эффект, получаемый при этом, проявляется при измерении как коротких, так и больших расстояний.
Вышеприведенный анализ позволяет сделать вывод о соответствии предлагаемого способа критерию "изобретательский уровень".
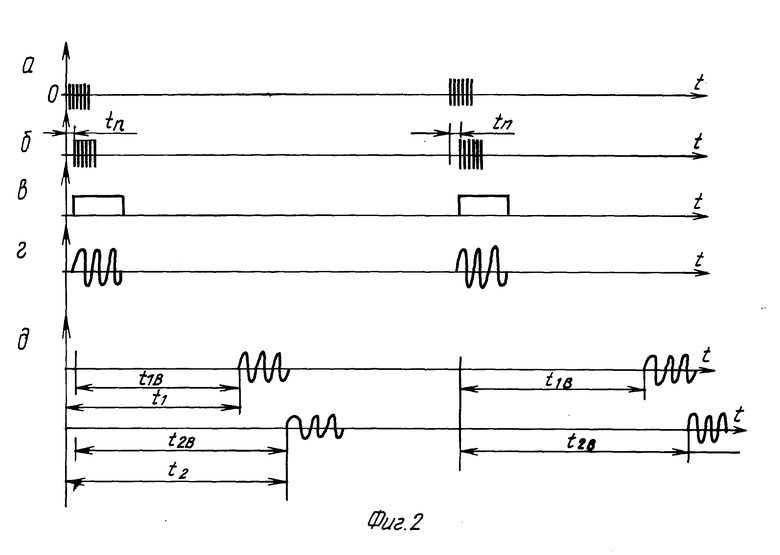
На фиг. 1 показано взаимное расположение точки отсчета, базового расстояния d и объекта, находящегося на расстоянии D. На фиг. 2 приведены осциллограммы импульсных сигналов. На фиг. 3 показана структурная схема устройства, реализующего заявленный способ измерения расстояния, где приняты следующие обозначения: 1 - задающее устройство, 2 - отвечающее устройство, 3 - генератор сигнала посылки, 4 - приемник сигнала посылки, 5 - формирователь импульсов, 6 - генератор сигнала возврата, 7 - первое приемное устройство сигнала возврата, 8 - второе приемное устройство сигнала возврата, 9 - таймер, 10 - первый измеритель временного интервала, 11 - второй измеритель временного интервала, 12 - вычислитель.
Способ характеризуется следующей совокупностью операций.
1. Посылают из точки отсчета 1 к объекту 2 импульсный сигнал посылки со скоростью Un (фиг. 2а).
2. Принимают сигнал посылки на объекте 2 через время tn (фиг. 2б).
3. Формируют на объекте 2 по переднему фронту принятого сигнала посылки импульсный сигнал возврата в пределах длительности принятого сигнала посылки (фиг. 2в).
4. В качестве импульсных сигналов посылки и возврата выбирают излучения разных видов так, чтобы скорость распространения сигнала возврата была меньшей или равной скорости распространения сигнала посылки.
5. Передают сигнал возврата в задающее устройство 1 (фиг. 2в).
6. Принимают сигнал возврата в задающем устройстве 1, в точке, отстоящей от точки отсчета расстояния d в направлении объекта 2 (фиг. 2д).
7. Измеряют первое и второе суммарные времена распространения сигналов посылки и возврата, т.е. t1 и t2 соответственно.
8. Определяют время прохождения сигналом посылки базового расстояния tб= d/Un.
9. Вычисляют расстояние до объекта по базовому расстоянию, первому и второму суммарным временам распространения сигналов и времени прохождения сигналом посылки базового расстояния.
10. Измерение первого и второго суммарных времен распространения сигналов ведут между передним фронтом сигнала посылки в точке отсчета и передними фронтами сигналов возврата, принятых в точке отсчета и в точке приема, отстоящей от точки отсчета на базовое расстояние.
Заявленный способ может быть реализован устройством, структурная схема которого показана на фиг. 3. Измеритель расстояния состоит из задающего устройства 1, размещенного в пункте отсчета, отвечающего устройства 2, расположенного на подвижном объекте. В состав задающего устройства 1 входит генератор радиоимпульсов 3, который посылает в эфир короткие во времени импульсные радиосигналы через антенну, направленную в сторону объекта. Приемная антенна, расположенная на отвечающем устройстве 2, подключается к радиоприемному узлу 4. По переднему фронту принятого импульса включается формирователь прямоугольного импульса 5, который на время, равное его длительности, запускает генератор ультразвука 6, который через излучатель ультразвука, подключенный к его выходу, посылает в сторону задающего устройства цуг ультразвуковых колебаний. В задающем устройстве 1 размещены два приемника ультразвука 7, 8, разнесенных по направлению распространения ультразвука на базовое расстояние d. Синхронизация работы всех узлов измерителя расстояния осуществляется с помощью таймера 9. По переднему фронту импульса таймера запускается импульсный радиопередатчик 3, формирователи временных интервалов 10, 11 и подается подготовительная команда на вычислитель расстояния 12. Интервалы времени t1, t2 формируются стартстопными измерителями 10, 11 путем их сброса передними фронтами импульсов, поступающих с приемников 7, 8. Приемник 7, расположенный в точке отсчета, формирует интервал t1, приемник 8, отстоящий от приемника 7 на базовое расстояние d, формирует интервал t2. Цифровые счетчики вычислителя 12 определяют цифровые коды, прямо пропорциональные интервалам времени t1, t2 путем счета числа стабильных кварцованных импульсов, размещаемых в интервалах t1, t2, а по команде таймера 9 над определенными таким образом цифровыми кодами по программе, заложенной в постоянном запоминающем устройстве 12 согласно формулы
D = d•t1/(t1-t2+d/Un),
выполняется совокупность операций по вычислению расстояния D. Константы d и Un прожигаются программе вычислителя.
Устройство для измерения расстояния может быть реализовано следующим образом. Задающее устройство 1 размещается в точке отсчета и может быть выполнено, в основном, на микросхемах. Таймер может быть произвольное техническое исполнение, при этом необходима кварцевая стабилизация генерируемых импульсов. Для этих целей подходят кварцевые генераторы на микросхемах К155А3 (см. рис. 30б) и рис. 1.30 в [3]. Генератор 3 исполняется на транзисторах типа КТ309, КТ312 и т.п.. Приемники сигналов возврата 7, 8 идентичны и выполняются на базе типовых датчиков ультразвука. Устройства измерения временных интервалов 10 и 11 могут быть выполнены на микросхемах набора К155. Вычислитель 12 может быть выполнен на микросхемах К1802 и К1810. Отвечающее устройство располагается на подвижном объекте. Приемник выполняется на микросхемах широкого применения, обеспечивающих компактность конструкции. Формирователь 5 целесообразно выполнять на микросхемах набора К155. Генератор 6 выполняется на транзисторах типа КТ309, КТ312 с ультразвуковым датчиком, например, на титанате бария.
Список использованных источников
1. EP 098160 A1, G 01 S 13/76, 1982.
2. Авторское свидетельство СССР N 901966, кл. G 01 S 15/74, 1982.
3. Шило В.Л. Популярные цифровые микросхемы. - Челябинск: Металлургия, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННЫЙ ИЗМЕРИТЕЛЬ УГЛА ПОВОРОТА АЛИДАДЫ | 1994 |
|
RU2092790C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ОТСЧЕТНОГО КРУГА УГЛОМЕРНОГО ИНСТРУМЕНТА | 1992 |
|
RU2082087C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ШИРОКОДИАПАЗОННЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНЫХ СМЕЩЕНИЙ | 1993 |
|
RU2069309C1 |
| АКУСТООПТИЧЕСКИЙ ДАТЧИК УГЛА | 1990 |
|
RU2029237C1 |
| МАЯТНИКОВЫЙ ГИРОКОМПАС | 1991 |
|
RU2046288C1 |
| Устройство для моделирования запаздывания сигнала | 1990 |
|
SU1783550A1 |
| Оптико-электронное устройство измерения размеров изделий | 1990 |
|
SU1747876A1 |
| ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2028665C1 |
| СПОСОБ ПОЛУЧЕНИЯ УСТОЙЧИВЫХ ЖИДКИХ НЕКРИСТАЛЛИЗУЮЩИХСЯ АЛКОКСИДОВ АЛЮМИНИЯ | 1991 |
|
RU2021248C1 |
| Оптико-электронный однокоординатный автоколлиматор | 1991 |
|
SU1778520A1 |

Использование: способ применим для точного измерения больших и малых расстояний до объектов. Сущность изобретения: из точки отсчета посылают импульсный сигнал в направлении объекта, до которого измеряют расстояние. По переднему фронту принятого на объекте сигнала формируют сигнал возврата так, чтобы скорость распространения сигнала возврата была меньшей или равной скорости распространения сигнала посылки. Принимают сигнал возврата в точке отсчета и в точке приема, отстоящей от точки отсчета на базовое расстояние в направлении объекта. Вычисляют расстояние до объекта по базовому расстоянию, первому и второму суммарным временам распространения сигналов посылки и возврата и времени прохождения сигналом посылки базового расстояния. 1 з.п. ф-лы, 3 ил.
| Su, авторское свидетельство, 901966, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
