Предлагаемое изобретение относится к области радиолокационной техники и может быть использовано в радиоэлектронных системах управления оружием с целью решения задачи обнаружения и опознавания объектов радиолокационного наблюдения при обязательной регламентации (ограничении) излучения запросного сигнала опознавания в пространстве.
У авторов отсутствуют информационные данные об аналогах заявленной системы.
Прототипом является система радиолокационного обнаружения и опознавания, реализованная в боевой машине зенитного ракетного комплекса (ЗРК) "Оса-АК" [1].
Функциональная схема системы, реализованная в боевой машине, представлена на фиг. 1, где приняты следующие обозначения:
1 - антенна обнаружения (АОБ),
2 - антенна опознавания (АОП),
3 - приемопередатчик опознавания (ППОП),
4 - синусно-косинусный вращающийся трансформатор (СКВТ),
5 - ключ ручного включения,
6 - привод равномерного вращения антенны по азимуту (ПРВАА),
7 - приемопередатчик обнаружения (ПП ОБ),
8 - индикатор,
9 - синхронизатор.
Известная система радиолокационного обнаружения и опознавания работает следующим образом.
Антенна обнаружения (1) производит равномерное механическое сканирование луча в пространстве обзора. Сканирование производится с помощью электромеханического привода вращения антенны по азимуту (6). Излучаемая в пространство (или принимаемая из пространства) высокочастотная энергия сигналов канализируется от приемопередатчика обнаружения (7) к антенне (1) (или от антенны (1) к приемопередатчику обнаружения (7)).
Сигнал обнаружения цели поступает с выхода приемопередатчика (7) на индикатор (8).
Радиолокационная информация отображается на экране индикатора в координатах "азимут-дальность" (индикатор типа B). Развертка луча индикатора формируется с использованием:
- сигнализирующего сигнала, формируемого синхронизатором (9);
- сигналов с выхода СКВТ (4), который связан механической передачей с выходным валом привода (6).
В текущем i-м цикле обзора оператор производит визуально по индикатору (8) измерение координат дальности и азимута обнаруженной цели, пользуясь при этом масштабными метками дальности и азимутальной шкалой, встроенной в обрамление индикатора, а затем запоминает эти координаты.
В следующем (i + 1)-м цикле обзора пространства оператор с целью опознавания обнаруженной цели, руководствуясь текущим азимутом электрической оси антенны обнаружения, считываемым с индикатора (8), и запомненными координатами обнаруженной цели, выдает в приемопередатчик опознавания (3) с помощью ключа ручного включения (5) команду запроса, т.е. команду на излучение запросного сигнала опознавания.
Излучение запросного сигнала производится в азимутальном секторе пространства, центр которого совпадает с азимутом обнаруженной цели, а ширина его определяется необходимыми условиями азимутальной пеленгации цели по каналу опознавания и составляет величину, не меньшую потенциальной ширины диаграммы направленности антенны опознавания (2) в азимутальной плоскости. Эта величина известна оператору априорно (под потенциальной шириной диаграммы направленности в данном случае следует понимать ширину диаграммы направленности по такому минимальному уровню, который еще обеспечивает устойчивое получение ответного сигнала опознавания при нахождении цели на данной текущей дальности).
Зондирующий запросный сигнал опознавания канализируется от приемопередатчика опознавания (3) к антенне опознавания (2), которая находится на одном и том же вращающемся по азимуту основании, что и антенна обнаружения (1), причем электрическая ось антенны опознавания (2) совпадает по азимуту с электрической осью антенны обнаружения (1).
Ответный сигнал опознавания, принятый антенной (2), канализируется на вход приемопередатчика опознавания (3), а затем после обработки в ППОП (3) поступает на индикатор (8). В указанном (i + 1)-м цикле обзора оператор производит визуально по индикатору (8) измерение координат дальности и азимута как отметки опознавания Dо, β0, так и опознаваемой цели D, β. Далее оператор выполняет операцию отождествления полученной отметки опаздывания и обнаружения цели.
Для этого оператор определяет разности соответствующих координат отметки опознавания и обнаружения цели D - Dо, β-β0 и сравнивает их с величинами соответственно а и b, известными оператору априорно (указанные величины а и b определяются в основном точностями измерения координат и разрешающими способностями каналов обнаружения и опознавания системы).
При совместном выполнении условий:
оператором выносится решение: обнаруженная цель с координатами D, β - цель "своя", в противном случае выносится решение: обнаруженная цель с координатами D, β - цель "чужая".
Координаты "чужой" цели вводятся оператором вручную в устройство целеуказания (УЦУ) ЗРК для передачи ее на обработку радиолокационным средствам наведения ЗРК с целью последующего уничтожения ракетным оружием.
Известно, что требование регламентации излучения в пространстве запросного сигнала опознавания, которое предъявляется ко всем радиолокационным средствам, оснащенным аппаратурой опознавания, является необходимой мерой в организации функционирования общей системы определения государственной принадлежности объектов радиолокационного наблюдения, которая вызвана ограниченной пропускной способностью бортовых ответчиков опознавания. Эта мера призвана снизить внутрисистемные помехи, облегчить условия электромагнитной совместимости и тем самым повысить надежность опознавания своих объектов в зонах действия ПВО, насыщенных наземными радиолокационными средствами и самолетами своей авиации.
Требование регламентации излучения в пространство запросного сигнала опознавания предусматривает организацию излучения указанного сигнала каждым отдельным радиолокационным средством только в тех азимутальных секторах пространства, которые содержат воздушные объекты, наблюдаемые этим средством.
В условиях указанной обязательной регламентации излучения запросного сигнала опознавания недостатком описанной выше системы-прототипа является невозможность проведения операции опознавания в том же цикле обзора, в каком была обнаружена цель.
При описанном построении системы-прототипа проведение операции опознавания возможно лишь после обнаружения цели, т.е. в следующем цикле обзора пространства. Это обстоятельство приводит к увеличению работного времени системы на величину, не меньшую чем длительность одного цикла обзора, а следовательно, и к увеличению времени реакции ЗРК, которое является одним из основных тактико-технических показателей войсковых ЗРК ближнего действия [2] .
Целью предлагаемого изобретения является повышение быстродействия процесса обнаружения и опознавания объектов радиолокационного наблюдения за счет уменьшения интервала времени от момента обнаружения объекта до момента его опознавания, что приводит к повышению боевой эффективности зенитного ракетного комплекса за счет сокращения его времени реакции.
Поставленная цель достигается тем, что в систему радиолокационного обнаружения и опознавания целей с регламентацией излучения запросного сигнала опознавания, содержащую антенну обнаружения (АОБ) и антенну опознавания (АОП), находящиеся на одном и том же вращающемся по азимуту основании и имеющие жесткую фиксацию электрических осей относительно друг друга, синусно-косинусный вращающийся трансформатор (СКВТ), привод равномерного вращения антенны по азимуту (ПРВАА), связанный с механической передачей с АОБ, АОП и СКВТ, приемопередатчик обнаружения (ППОБ), подключенный своим входом к АОБ, приемопередатчик опознавания (ППОП), соединенный своим входом с АОП, индикатор, подключенный своим первым входом к выходу ППОБ и вторым входом к выходу ППОП, ключ ручного включения запроса, подключенный своим выходом к второму входу ППОП, введены синхронизатор, два элемента И, два измерителя дальности, три блока вычитания, функциональный преобразователь напряжение-код (ФПНК), два триггера, два пороговых блока, дешифратор, датчик константы, два измерителя азимута, счетчик импульсов, шесть запоминающих устройств и электронный ключ, выходы СКВТ подключены к входам ФПНК, выход ППОП подключен к первым входам первого измерителя дальности, первого измерителя азимута, первого триггера и счетчика импульсов, выход первого измерителя дальности подключен к первому входу первого запоминающего устройства, выход которого подключен к первым входам второго запоминающего устройства и первого блока вычитания, выход первого измерителя азимута подключен к первому входу третьего запоминающего устройства, выход которого подключен к первым входам четвертого запоминающего устройства и второго блока вычитания, выход ППОП подключен к первым входам второго измерителя дальности и второго измерителя азимута, выход которого подключен к первому входу третьего блока вычитания, выход датчика константы подключен к второму входу третьего блока вычитания, выход третьего блока вычитания подключен к первому входу пятого запоминающего устройства, выход которого подключен к второму входу второго блока вычитания, выход второго измерителя дальности подключен к первому входу шестого запоминающего устройства, выход которого подключен к второму входу первого блока вычитания, выход первого блока вычитания подключен к входу первого порогового блока, выход второго блока вычитания подключен к входу второго порогового блока, первый вход первого элемента И подключен к выходу первого порогового блока, второй его вход - к выходу второго порогового блока, а его выход - к первому входу второго триггера, выход которого подключен к управляющему входу электронного ключа, выход ФПНК подключен к вторым входам первого и второго измерителей азимута, третьему входу индикатора и входу синхронизатора, выход второго элемента И подключен к второму входу счетчика импульсов, выход которого подключен к входу дешифратора, выход дешифратора подключен к второму входу первого триггера, выход которого подключен к второму входу ППОП и первому входу второго элемента И, первый выход синхронизатора подключен к второму входу ППОБ, четвертому входу индикатора, третьему входу первого измерителя азимута и второму входу первого измерителя дальности, второй выход синхронизатора подключен к третьему входу ППОП, третьему входу второго измерителя азимута и второму входу второго измерителя дальности, третий выход синхронизатора подключен к вторым входам первого и третьего запоминающих устройств, четвертый выход синхронизатора подключен к вторым входам пятого и шестого запоминающих устройств, пятый выход синхронизатора подключен через электронный ключ к вторым входам второго и четвертого запоминающих устройств, шестой выход синхронизатора подключен к третьим входам первого, второго, третьего, четверного, пятого и шестого запоминающих устройств, седьмой выход синхронизатора подключен к второму входу второго триггера, восьмой выход синхронизатора подключен к второму входу второго элемента И, электрическая ось антенны опознавания сдвинута по азимуту относительно электрической оси антенны обнаружения в направлении, противоположном направлению сканирования антенны по азимуту, на постоянный угол, величина которого пропорциональна направлению антенны опознавания, причем величина константы датчика константы равна значению указанного постоянного угла.
Синхронизатор системы содержит в своем составе генератор тактовых импульсов, электронный ключ, три делителя частоты, два триггера, эмиттерный повторитель, четыре счетчика импульсов, шесть дешифраторов, четыре одновибратора и пять элементов И, при этом в синхронизаторе выход генератора тактовых импульсов подключен к входам первого и второго делителей частоты, выход первого триггера подключен к управляющему входу электронного ключа, выход первого дешифратора подключен к обнуляющему входу первого счетчика, первому входу второго триггера и входу эмиттерного повторителя, выход первого счетчика подключен к входам второго и третьего дешифраторов, выход третьего дешифратора подключен к первому входу первого триггера и входу первого одновибратора, выход которого подключен к первому входу первого элемента И, выход второго дешифратора подключен к вторым входам триггеров, входы третьего делителя частоты и эмиттерного повторителя подключены к счетному входу первого счетчика, входу второго одновибратора и обнуляющим входам второго, третьего и четвертого счетчиков, выход второго одновибратора подключен к первому входу второго элемента И, выход второго счетчика импульсов подключен к входу четвертого дешифратора, выход четвертого дешифратора подключен к входу третьего одновибратора, выход которого подключен к первому входу третьего элемента И, выход третьего счетчика подключен к входу пятого дешифратора, выход пятого дешифратора подключен к первому входу четвертого элемента И, выход четвертого счетчика подключен к входу шестого дешифратора, выход электронного ключа подключен к счетным выходам второго, третьего и четвертого счетчиков и вторым входам второго, третьего и четвертого элемента И, первый вход пятого элемента И подключен к выходу второго триггера, его второй вход - к выходу генератора тактовых импульсов, а его выход - к входу третьего делителя частоты, сигнальному входу электронного ключа и второму входу первого элемента И, вход первого дешифратора является входом синхронизатора, выходы первого и второго делителей частоты являются соответственно первым и вторым выходами синхронизатора, выходы второго и третьего элементов И являются соответственно третьим и четвертым выходами синхронизатора, выходы четвертого и первого элементов И являются соответственно пятым и шестым выходами синхронизатора, а выходы шестого дешифратора и генератора тактовых импульсов являются соответственно седьмым и восьмым выходами синхронизатора.
Величина угла сдвига Δβ между электрическими осями АОБ (1) и АОП (2) выбирается из условия:
где
δβ - ширина диаграммы направленности антенны опознавания (2) в азимутальной плоскости по такому уровню, который является наименьшим из уровней диаграммы направленности, обеспечивающих устойчивое опознавание цели, обнаруженной на минимальной инструментальной дальности, [град].
Указанный сдвиг диаграммы направленности АОП по азимуту относительно диаграммы направленности АОБ в сторону, противоположную направлению сканирования АОБ по азимуту, на фиксированный угол, достаточный для соблюдения необходимых условий пеленгации цели по каналу опознавания, в сочетании с возможностью автоматического включения излучения запросного сигнала опознавания, позволяет осуществлять операцию опознавания цели сразу же после ее обнаружения (т.е. в том же цикле обзора пространства).
Функциональная схема заявляемой системы представлена на фиг. 2, где приняты следующие обозначения:
1 - 9 - описаны выше при описании обозначений функциональной схемы, представленной на фиг. 1;
10 - элемент И (ЭИ-1),
11 - элемент И (ЭИ-2),
12 - измеритель дальности (ИД-1),
13 - измеритель дальности (ИД-2),
14 - блок вычитания (БВ-1),
15 - блок вычитания (БВ-2),
16 - блок вычитания (БВ-3),
17 - функциональный преобразователь напряжение - код (ФПНК),
18-19 - триггеры (Тр-1 и Тр-2),
20 и 21 - пороговые блоки (ПБ-1 и ПБ-2),
22 - дешифратор,
23 - датчик константы (величины угла сдвига Δβ - по азимуту электрической оси антенны опознавания относительно электрической оси антенны обнаружения,
24 - измеритель азимута (ИА-1),
25 - измеритель азимута (ИА-2),
26 - счетчик импульсов,
27, 28, 29, 30, 31 и 32 - запоминающие устройства (соответственно ЗУ-1, ЗУ-2, ЗУ-3, ЗУ-4, ЗУ-5 и ЗУ-6),
33 - электронный ключ.
Заявляемая система работает следующим образом.
Антенна обнаружения (1) производит равномерное сканирование луча в пространстве обзора. Сканирование производится с помощью электромеханического привода вращения антенны по азимуту (6).
Излучаемая в пространство (или принимаемая из пространства) высокочастотная энергия сигналов канализируется от приемопередатчика обнаружения (7) к антенне (1) (или от антенны (1) к приемопередатчику обнаружения (7)). Сигнал обнаруженной цели, представляющий собой пачку нормированных импульсов, поступает с выхода приемопередатчика обнаружения (7) на измерители координат дальности (24) и азимута (12), а также на индикатор (8).
Радиолокационная информация отображается на экране индикатора в координатах "азимут-дальность" (индикатор типа В).
Развертка луча индикатора формируется с использованием:
- синхронизирующего сигнала, формируемого синхронизатором (9),
- текущего азимута антенны обнаружения (1), поступающего в цифровом коде с выхода ФПНК (17).
Последовательно соединенные СКВТ (4), связанный с выходным валом привода (6) механической передачей, и ФПНК (17) представляют собой в совокупности аналого-цифровой преобразователь типа "угол-код", аналогичный соответствующим преобразователям, которые описаны в работе [3].
С выходов измерителей (24) и (12) измеренные координаты обнаруженной цели поступают в запоминающие устройства (27) и (29): координата дальности D - в ЗУ (27), а координата азимута β - в ЗУ (29).
Сигнал обнаруженной цели с выхода ППОБ (7) поступает также на первые входы триггера (18) и счетчика импульсов (26).
Под воздействием этого сигнала совокупность взаимодействующих между собой устройств, состоящая из триггера (18), элемента И (11), счетчика импульсов (26) и дешифратора (22), автоматически формирует сигнал включения запроса, который поступает в приемопередатчик опознавания (3). Происходит это следующим образом.
Под воздействием первого импульса пачечного сигнала обнаруженной цели триггер (18) опрокидывается (переходит из состояния "0" в состояние "1") и на его выходе появляется сигнал включения запроса, который поступает на входы ППОП (3) и элемента И (11). При наличии этого сигнала на входе указанного элемента И тактовая импульсная последовательность, подаваемая на другой вход элемента И (11) из синхронизатора (9), проходит через этот элемент и подается на счетчик импульсов (26). Поскольку каждый импульс пачечного сигнала обнаруженной цели обнуляет счетчик импульсов (26), то он начинает счет числа тактовых импульсов после прихода последнего импульса пачечного сигнала обнаруженной цели. Цифровой код счетного числа тактовых импульсов n с выхода счетчика (26) поступает на дешифратор (22).
Дешифратор (22) выделяет кодовую комбинацию, которая соответствует числу N, определяемому по формуле:
где
δβ - величина, описанная выше;
T - период повторения тактовой последовательности импульсов, [c];
ω - скорость сканирования антенны по азимуту, [град/с].
При выполнении условия
n=N
дешифратор (22) выдает импульс, который поступает на второй вход триггера (18) и возвращает его в исходное состояние (состояние "0").
Таким образом, на выходе триггера (18) формируется импульсный сигнал включения запроса длительностью, равной (с точностью до периода повторения T тактовой импульсной последовательности) величине τ, которая определяется по формуле:
где
δβ и ω - описаны выше.
t - длительность пачечного сигнала обнаруженной цели [c].
Запросный сигнал опознавания канализируется от приемопередатчика опознавания (3) к антенне опознавания (2), которая находится на одном и том же вращающемся по азимуту основании, что и антенна обнаружения (1), и электрическая ось которой смещена по азимуту относительно электрической оси антенны обнаружения (1) в направлении, противоположном направлению вращения антенны, на угол Δβ, определяемый по формуле (3).
Ответный сигнал опознавания, принятый антенной (2), канализируется на вход ППОП (3), а затем, после обработки в ППОП (3) поступает на измерители координат дальности (25) и азимута (13), а также на индикатор (8).
Измеренная координата азимута βn поступает с выхода измерителя азимута (13) в блок вычитания (16), на другой вход которого подается величина Δβ с датчика константы (23). Эта величина используется в качестве поправки, вносимой в результат измерения и учитывающей сдвиг электрической оси антенны опознавания (2) относительно электрической оси антенны обнаружения (1) на угол Δβ.
Получаемая таким образом координата азимута отметки опознавания β0, равная βn-Δβ, поступает из блока вычитания (16) в запоминающее устройство (31). Координата дальности отметки опознавания Dо поступает с выхода измерителя (25) в запоминающее устройство (32).
Информация о координатах обнаруженной цели Dк, βк, где k - номер цели (k = 1,2,3, . . . ,kmax), хранящаяся в запоминающих устройствах (27) и (29), и координатах отметок опознавания Dоj, βoj, где j - номер отметки опознавания (j= 1, 2, 3,..., jmax), хранящаяся в запоминающих устройствах (32) и (31), используется для выполнения операции отождествления обнаруженных целей и отметок опознавания. В результате проведения этой операции из массива координат обнаруженных целей, хранящихся в запоминающих устройствах (27) и (29), выделяются координаты "чужих" целей и передаются в устройство целеуказания, а далее средствам наведения ЗРК для дальнейшем обработки и последующего уничтожения этих целей ракетным оружием.
Операция отождествления состоит из нескольких циклов, число которых равно числу целей kmax, обнаруженных за один просмотр зоны обзора. Поскольку в каждом таком цикле операции отождествления подвергается одна из обнаруженных целей, то номер цикла и номер отождествляемой в этом цикле цели совпадают.
В k-м текущем цикле операции отождествления производится поочередное сравнение координат k-й обнаруженной цели Dк, βк с соответствующими координатами каждой из jmax отметок опознавания.
В том случае, если будут выполнены совместно условия
хотя бы при одном каком-либо значении j, то k-я цель идентифицируется как "своя" и в устройство целеуказания ЗРК ее координаты не выдаются.
В противном случае k-я цель идентифицируется как "чужая" и ее координаты Dк, βк выдаются в устройство целеуказания ЗРК.
Операция отождествления осуществляется совокупностью нескольких взаимодействующих элементов заявляемой системы. К этой совокупности относятся: запоминающие устройства (29), (27), (32) и (31), блоки вычитания (15) и (14), пороговые блоки (21) и (20), элемент И (10), электронный ключ (33), триггер (19), запоминающие устройства (30) и (28), которые выполняют роль буферных устройств памяти.
Управление операцией отождествления производится синхронизатором (9).
Операция отождествления выполняется следующим образом.
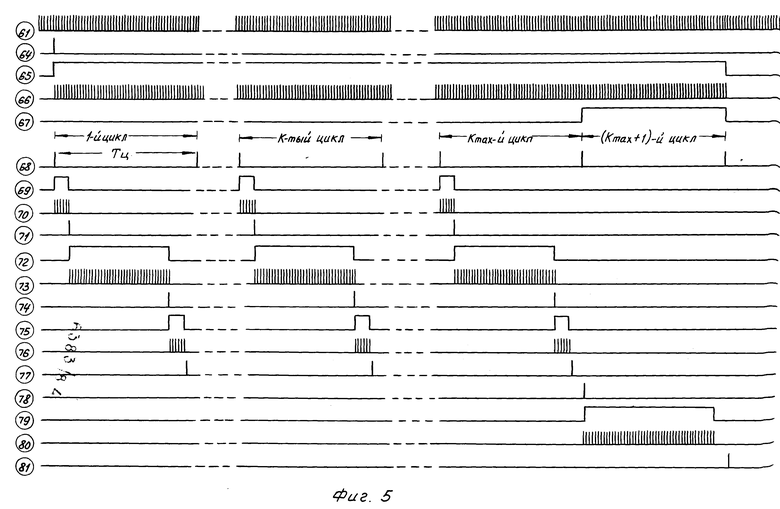
В к-м цикле операции координаты дальности и азимута К-й обнаруженной цеди Dк, βк по командам считывания, поступающим на запоминающие устройства (29) и (27) из синхронизатора (9) (см. осциллограмму 70 на фиг. 5), считываются из запоминающих устройств соответственно (27) и (29) и вводятся в блоки вычитания соответственно (14) и (15), а также в буферные запоминающие устройства соответственно (28) и (30). Указанные координаты сохраняются в блоках вычитания (14) и (15) на их входах в течение всего k-го цикла операции отождествления.
На вторые входы блоков вычитания (14) и (15) подаются считываемые из запоминающих устройств соответственно (32) и (31) координаты отметок опознавания Doj, βoj поочередно с номерами от 1 до jmax.
Считывание указанных координат производится по командам считывания, поступающим на запоминающие устройства (32) и (31) из синхронизатора (9) (см. осциллограмму 73 на фиг. 5).
Получаемые при этом на выходах блоков вычитания (14) и (15) соответственно разности Dк и Doj и βк-βoj одновременно поступают в пороговые блоки соответственно (20) и (21), в которых их модули одновременно сравниваются с пороговыми величинами соответственно а и b.
Если условия (7) и (8) выполняются (т.е. k-я цель - "своя"), то пороговые блоки (21) и (20) со своих выходов одновременно выдают импульсные сигналы, которые поступают на входы элемента И (10). Возникающий при этом на выходе элемента И (10) импульс подается на триггер (19) и опрокидывает его (переводит из состояния "0" в состоянии "1"). На выходе триггера (19) появляется импульс, который воздействует на электронный ключ (33) в качестве управляющего (запирающего) сигнала и переводит его в состояние "ЗАКРЫТ". В этом состоянии электронный ключ (33) блокирует подаваемую из синхронизатора (9) в буферные запоминающие устройства (28) и (30) команду (см. осциллограмму 76 на фиг. 5) на считывание и вывод в устройство целеуказания ЗРК координат k-й цели Dк, βк. Эта команда выдается в конце k-го цикла операции окончания сравнения координат Dк, βк с координатами 
 . По окончании этой команды синхронизатор (9) выдает на триггер (19) сигнал сброса (см. осциллограмму 77 на фиг. 5) и переводит его в исходное состояние "0".
. По окончании этой команды синхронизатор (9) выдает на триггер (19) сигнал сброса (см. осциллограмму 77 на фиг. 5) и переводит его в исходное состояние "0".
В том случае, если условия (7) и (8) совместно не выполняются (т.е. k-я цель - "чужая"), то электронный ключ (33) остается в исходном положении "ОТКРЫТ". Тогда названный сигнал считывания (см. осциллограмму 76 на фиг. 5), вырабатываемый синхронизатором (9) в конце К-го цикла операции отождествления, проходит через электронный ключ (33) на буферные запоминающие устройства (28) и (30) и выведенные координаты К-й цели Dк, βк поступают с выходов этих устройств на устройство целеуказания ЗРК.
После выдачи синхронизатором (9) сигнала сброса, поступающего на триггер (19), к-й цикл операции отождествления заканчивается и начинается (К+1)-й цикл, в котором отождествляется следующая (К+1)-я обнаруженная цель.
После выполнения всех kmax циклов операция отождествления и выдача координат "чужих" целей в устройство целеуказания ЗРК заканчивается, а вся информация, содержащаяся в запоминающих устройствах (27), (29), (31), (28) и (30), стирается по команде, формируемой синхронизатором (9) (см. осциллограмму 80 на фиг. 5).
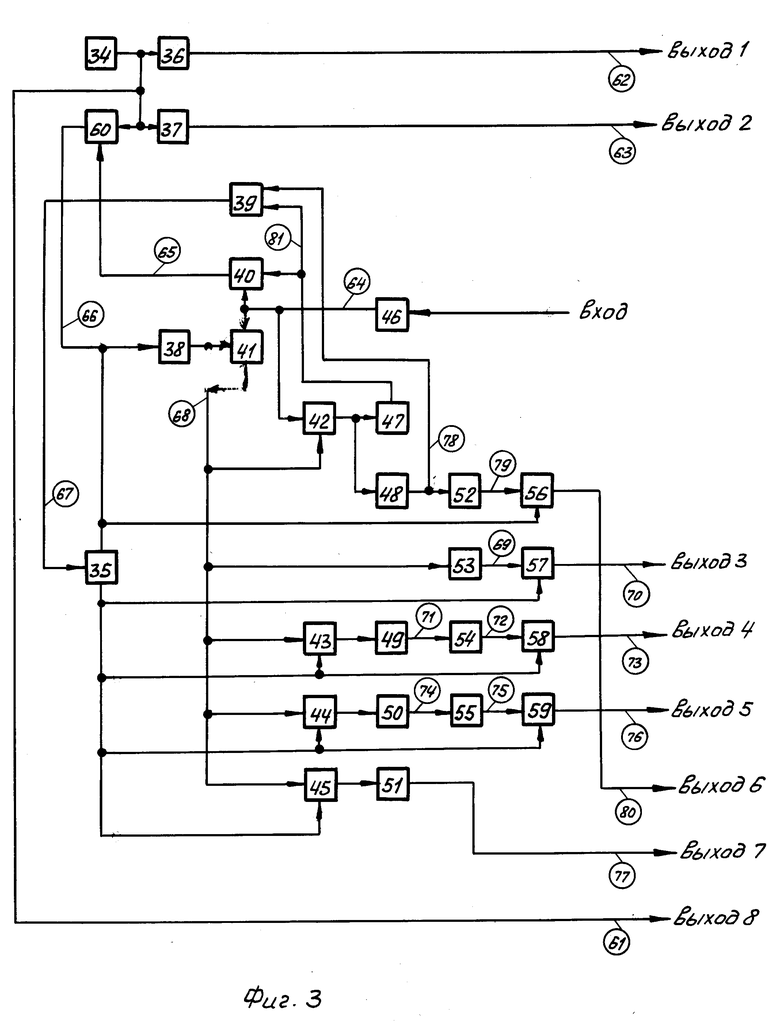
Функциональная схема синхронизатора (9) представлена на фиг. 3, где приняты следующие обозначения:
34 - генератор тактовых импульсов,
35 - электронный ключ,
36, 37 и 38 - делители частоты (соответственно ДЧ-1, ДЧ-2 и ДЧ-3),
39 и 40 - триггеры (соответственно Тр-1 и Тр-2),
41 - элемент ИЛИ,
42, 43, 44 и 45 - счетчики импульсов (соответственно СИ-1, СИ-2, СИ-3 и СИ-4).
46, 47, 48, 49, 50 и 51 - дешифраторы (соответственно ДШ-1, ДШ-2, ДШ-3, ДШ-4, ДШ-5 и ДШ-6),
52, 53, 54 и 55 - одновибраторы (соответственно ОВ-1, ОВ-2, ОВ-3 и ОВ-4),
56, 57, 58, 59 и 60 - элементы И (соответственно ЭИ-1, ЭИ-2, ЭИ-3 и ЭИ-4).
Входом синхронизатора является вход дешифратора (46).
Синхронизатор имеет следующие выходы:
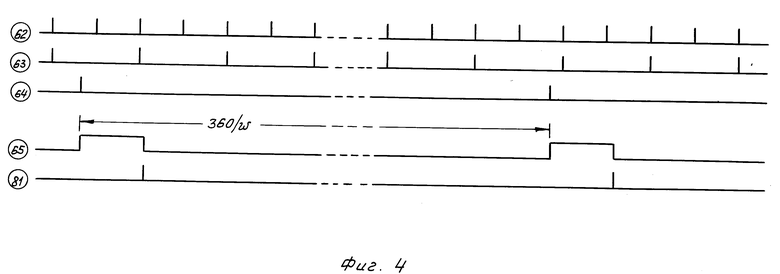
Выход 1 - синхроимпульсы канала обнаружения (см. осциллограмму 62 на фиг. 4).
Выход 2 - синхроимпульсы канала опознавания (см. осциллограмму 63 на фиг. 4).
Выход 3 - импульсы считывания координат обнаруженных целей (см. осциллограмму 70 на фиг. 5).
Выход 4 - импульсы считывания координат отметок опознавания (см. осциллограмму 73 на фиг. 5).
Выход 5 - импульсы считывания координат опознанных "чужих" целей (см. осциллограмму 76 на фиг. 5).
Выход 6 - импульсы стирания информации о координатах обнаружения целей и отметок опознавания (см. осциллограмму 80 на фиг. 5).
Выход 7 - импульсы сброса (см. осциллограмму 77 на фиг. 5).
Выход 8 - тактовые импульсы (см. осциллограмму 61 на фиг. 5).
Синхронизатор функционирует следующим образом.
Тактовые импульсы с выхода генератора (34) (см. осциллограмму 61 на фиг. 5) поступают на входы делителей частоты (36) и (37). Выход делителя частоты (36) является первым выходом синхронизатора. Импульсы с выхода делителя частоты (36) (см. осциллограмму 62 на фиг. 4) являются импульсами, синхронизирующими работу канала обнаружения заявляемой системы. Они поступают на ППОБ (7), индикатор (8), измерители координат дальности (24) и азимута (12).
Выход делителя частоты (37) является вторым выходом синхронизатора. Импульсы с выхода делителя частоты (37) (см. осциллограмму 63 на фиг. 4) являются импульсами, синхронизирующими работу канала опознавания заявляемой системы. Они поступают на ППОП (3), измерители координат дальности (25) и азимута (13).
Выход генератора тактовых импульсов (34) является восьмым выходом синхронизатора. С этого выхода тактовые импульсы поступают на элемент И (11) заявляемой системы.
На вход синхронизатора подается код текущего азимута антенны обнаружения с выхода ФПНК (17). Дешифратор (46) выделяет кодовую комбинацию, которая соответствует максимальному значению азимута антенны обнаружения. При этом на выходе дешифратора (46) появляется импульс (см. осциллограмму 64 на фиг. 4 и 5). Появление этого импульса свидетельствует об окончании текущего цикла обзора пространства и начале операции отождествления, после которой начнется следующий цикл обзора.
Импульс с выхода дешифратора (46) поступает на обнуляющий вход счетчика импульсов (42) и обнуляет его. Тот же импульс, поступает на вход одновибратора (53) через элемент ИЛИ (41) и обнуляющие входы счетчиков импульсов (43), (44) и (45). При этом указанные счетчики обнуляются.
Импульс с выхода дешифратора (46) поступает также на вход триггера (40) и переводит его в состояние "1". Выходной сигнал триггера (40) (см. осциллограмму 65 на фиг. 4 и 5) поступает на вход элемента И (60), на второй вход которого подаются тактовые импульсы с генератора (34). Прошедшие через элемент И (60) тактовые импульсы (см. осциллограмму 66 на фиг. 5) поступают на делитель частоты (38), соединенный с первым входом элемента ИЛИ (41), на вход элемента И (56) и на вход электронного ключа (35). Последний находится в состоянии "ОТКРЫТ", т. к. на его управляющий вход (см. осциллограмму 67 на фиг. 5) приходит сигнал нулевого уровня с выхода триггера (39), находящегося в состоянии "0".
Прошедшие через электронный ключ (35) тактовые импульсы поступают на счетные входы счетчиков импульсов (43), (44) и (45) и на входы элементов И (57), (58) и (59).
Делитель частоты (38) делит частоту повторения входной последовательности тактовых импульсов таким образом, что выходная последовательность импульсов (см. осциллограмму 68 на фиг. 5) имеет период повторения определенной длительности Tц. Длительность периода повторения Tц выбирается так, чтобы за этот интервал времени был проведен один цикл операции отождествления.
Счетчик импульсов (42), считая число импульсов, поступающих на его счетный вход с выхода делителя (38), подсчитывает как бы текущее число циклов операций отождествления (всего в операции отождествления должно быть kmax циклов, где kmax - максимальное число обнаруженных целей).
Каждый из импульсов на выходе делителя (38) является началом текущего цикла операции отождествления.
В начале каждого k-го цикла операции отождествления счетчики импульсов (43), (44) и (45) обнуляются импульсом (см. осциллограмму 68 на фиг. 5), поступающим с выхода делителя частоты (38) на их обнуляющие входы, а затем подсчитывают тактовые импульсы, поступающие с выхода элемента И (60) через электронный ключ (35) на их счетные входы. Тем же импульсом с выхода делителя частоты (38) (см. осциллограмму 68 на фиг. 5) запускается также одновибратор (53), который формирует на своем выходе импульс (см. осциллограмму 69 на фиг. 5).
Этот импульс поступает на вход элемента И (57), на другой вход которого поступают тактовые импульсы. В результате этого на выходе элемента И (57), являющемся третьим выходом синхронизатора, формируются импульсы считывания (см. осциллограмму 70). Эти импульсы поступают на запоминающие устройства (27) и (29) заявляемой системы для считывания координат k-й обнаруженной цели.
Дешифратор (49) выделяет кодовую комбинацию, которая соответствует числу подсчитываемых счетчиком (43) тактовых импульсов, находящихся в интервале времени между импульсом на выходе делителя (38) и задним фронтом импульса на выходе одновибратора (53). Появляющийся при этом импульс на выходе дешифратора (49) (см. осциллограмму 71 на фиг. 5) запускает одновибратор (54), который формирует на своем выходе импульс (см. осциллограмму 72 на фиг. 5). Выходной импульс одновибратора (54) поступает на вход элемента И (58), на другой вход которого поступают тактовые импульсы. В результате этого на выходе элемента И (58), являющемся четвертым выходом синхронизатора, формируются импульсы считывания (см. осциллограмму 73 на фиг. 5). Эти импульсы поступают на запоминающие устройства (31) и (32) заявляемой системы для последовательного считывания координат всех отметок опознавания.
Дешифратор (50) выделяет кодовую комбинацию, которая соответствует числу подсчитываемых счетчиком (44) тактовых импульсов, находящихся в интервале времени между импульсом на выходе делителя (38) и задним фронтом выходного импульса одновибратора (54). Появляющийся при этом импульс на выходе дешифратора (50) (см. осциллограмму 74 на фиг. 5) запускает одновибратор (55), который формирует на своем выходе импульс (см. осциллограмму 75 на фиг. 5). Выходной импульс одновибратора (55) поступает на вход элемента И (59), на другой вход которого поступают тактовые импульсы. В результате этого на выходе элемента И (59), являющемся пятым выходом синхронизатора, формируются импульсы считывания (см. осциллограмму 76 на фиг. 5). Эти импульсы поступают на запоминающие устройства (28) и (30) заявляемой системы для считывания координат опознанной "чужой" цели.
Дешифратор (51) выделяет кодовую комбинацию, которая соответствует числу подсчитываемых счетчиком (45) тактовых импульсов, находящихся в интервале времени между импульсом на выходе делителя (38) и задним фронтом выходного импульса одновибратора (55). Появляющийся при этом на выходе дешифратор (51) импульс (см. осциллограмму 77 на фиг. 5) поступает на триггер (19) в качестве импульса сброса и переводит триггер (19) в состояние "0". Таким образом, выход дешифратора (51) является седьмым выходом синхронизатора.
Указанный импульс сброса (см. осциллограмму 77 на фиг. 5) свидетельствует об окончании текущего цикла операции отождествления.
С появлением следующего импульса на выходе делителя (38) начинается следующий (k + 1)-й цикл операции отождествления, в котором подвергается этой операции следующая из обнаруженных целей.
В конце kmax-го цикла операции отождествления дешифратор (48) выделяет поступающую с выхода счетчика (42) кодовую комбинацию, соответствующую числу kmax, и выдает со своего выхода импульс (см. осциллограмму 78 на фиг. 5), который поступает на вход одновибратора (52) и вход триггера (38). Триггер (39) под воздействием этого импульса переходит в состояние "1" и его выходной сигнал (см. осциллограмму 67 на фиг. 5) переводит электронный ключ (35) в состояние "ЗАКРЫТО", что обеспечивает исключение формирования импульсов считывания в (kmax + 1)-м цикле.
Одновибратор (52) формирует импульс (см. осциллограмму 79 на фиг. 5) длительностью, необходимой для стирания информации в запоминающих устройствах заявляемой системы, и подает его на вход элемента И (56), на другой вход которого поступают тактовые импульсы. На выходе элемента И (56), который является шестым выходом синхронизатора, формируются импульсы стирания информации (см. осциллограмму 80 на фиг. 5) и поступают в запоминающие устройства (27), (28), (29), (30), (31) и (32) заявляемой системы.
Таким образом, стирание информации производится сразу же после проведения kmax циклов операции отождествления в (kmax + 1)-м периоде повторения импульсной последовательности, снимаемой с выхода делителя частоты (38).
Дешифратор (47) выделяет поступающую на его вход кодовую комбинацию, соответствующую числу kmax + 1, и выдает импульс (см. осциллограмму 81 на фиг. 5), который поступает на вторые входы триггеров (39) и (40) и переводит их в состояние "0" (см. осциллограммы 65 и 67 на фиг. 5).
На этом синхронизатор заканчивает управление операцией отождествления и заявляемая система начинает осуществлять следующий цикл обзора пространства. По прошествии этого цикла обзора и с появлением следующего импульса на выходе дешифратора (46) (см. осциллограмму 64 на фиг. 4) повторяется уже описанная картина управления операцией отождествления с помощью синхронизатора.
Как видно из приведенного выше описания, вследствие указанного расположения диаграммы направленности АОП (2) по отношению к диаграмме направленности АОБ (1) и автоматизации включения запроса, отождествления обнаруженных целей и отметок опознавания и вынесения решения "цель своя - цель чужая":
- соблюдаются необходимые условия азимутальной пеленгации обнаруженной цели по каналу опознавания,
- регламентируется излучение запросного сигнала опознавания в азимутальном секторе минимально возможной ширины,
- в пределах одного и того же цикла обзора пространства обеспечивается совмещение операций обнаружения и опознавания целей.
Предлагаемая система радиолокационного обнаружения и опознавания реализована в экспериментальном и опытных образцах изделия ТОР, изготовленных для проведения заводских и государственных испытаний.
Та часть предлагаемого устройства, которая определяет его существенные отличительные от прототипа признаки, выполнена в виде специализированных цифровых вычислителей.
Применение предлагаемого изобретения позволяет совместить в одном и том же цикле обзора две операции: обнаружение целей и опознавание целей. За счет этого достигается уменьшение интервала времени от момента обнаружения цели до момента ее опознавания, что приводит к сокращению времени реакции ЗРК и, в конечном счете, к увеличению его боевой эффективности в борьбе с целями, обнаруженными на предельно малых дальностях.
Как известно, такие цели носят название "внезапно обнаруженных" и являются типовыми целями для ЗРК ближнего действия, поскольку тактика боевого применения тактической авиации вероятного противника основывается на преимущественном использовании предельно малых высот для полетов самолетов, где их обнаружение радиолокационными средствами ПВО весьма затруднено из-за негативного влияния подстилающей земной поверхности и ее рельефа на процесс радиолокационного наблюдения [4].
Оценку степени сокращения времени реакции ЗРК за счет реализации предлагаемой системы можно сделать по следующей формуле:
где
η - величина, характеризующая на сколько процентов сокращается время реакции ЗРК,
tо - время однократного просмотра зоны обзора, [с];
tр - время реакции ЗРК [с].
Ожидаемое сокращение времени реакции изделия 9А330 за счет реализации предлагаемой системы оценивается значениями величины η, находящимися в интервале от 12 до 16%.
Литература
1. Техническое описание боевой машины "Оса-АК", ГП "ИЭМЗ", 1979.
2. Пересада С.А. Зенитные ракетные комплексы. Воениздат, Москва, 1973.
3. Гитис Э.И., Пискулов Е.А. Аналого-цифровые преобразователи. Энергоиздат, Москва, 1981.
4. Суриков Б.Т. Ракетные средства борьбы с низколетящими целями. Воениздат, Москва, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВОЙСКОВОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА БЛИЖНЕГО ДЕЙСТВИЯ | 1985 |
|
RU2102772C1 |
| УСТРОЙСТВО ДЛЯ ПУСКА РАКЕТ | 1981 |
|
RU2121647C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2124221C1 |
| УСТРОЙСТВО СЧИТЫВАНИЯ ИНФОРМАЦИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2083411C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2037842C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ СУДОВ | 1991 |
|
RU2042212C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2131612C1 |

Устройство обнаружения и опознавания целей относится к радиолокационной технике и может быть использовано в радиоэлектронных системах управления оружием. Сущность изобретения заключается в том, что в одном и том же цикле обзора совмещаются две операции - обнаружение и опознавание целей, что приводит к сокращению времени реакции зенитного ракетного комплекса. 1 з.п. ф-лы, 5 ил.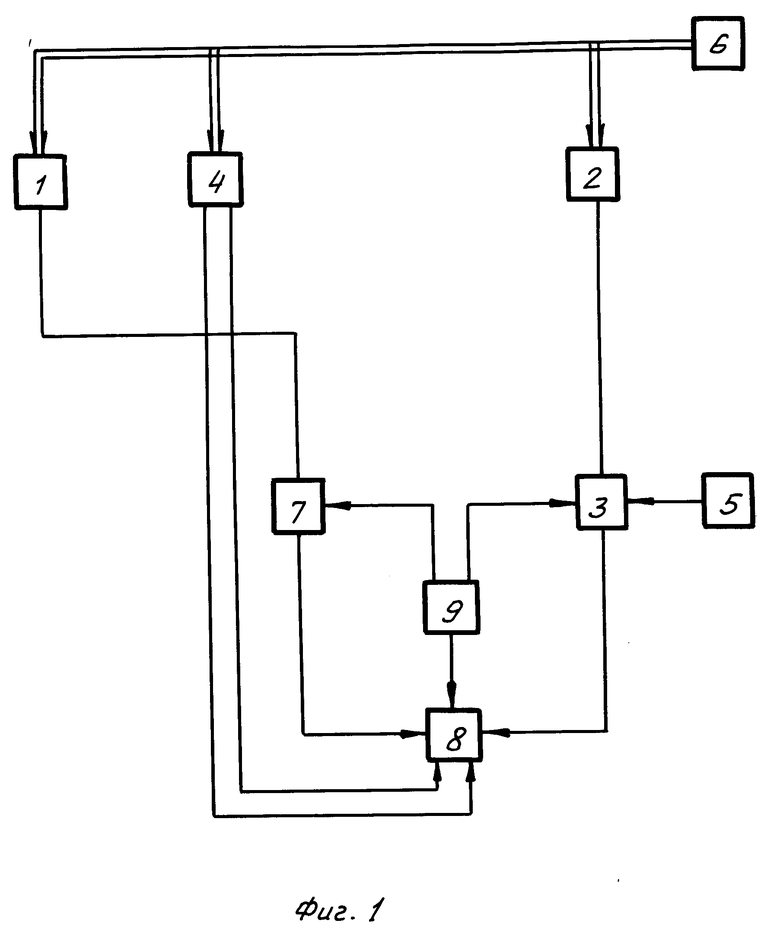
выход которого является первым выходом устройства обнаружения и опознавания целей, последовательно соединенные первый измеритель азимута, третий запоминающий блок и четвертый запоминающий блок, выход которого является вторым выходом устройства обнаружения и опознавания целей, прерыватель, включенный между пятым выходом синхронизатора и входами считывания второго и четвертого запоминающих блоков, последовательно соединенные первый блок вычитания, первый пороговый блок, первый элемент И и первый триггер, выход которого соединен с управляющим входом прерывателя, последовательно соединенные второй измеритель дальности, второй блок вычитания, пятый запоминающий блок, третий блок вычитания и второй пороговый блок, выход которого соединен с вторым входом первого элемента И, блок постоянной памяти, выход которого соединен с вторым входом второго блока вычитания, последовательно соединенные второй измеритель азимута и шестой запоминающий блок, последовательно соединенные счетчик импульсов, дешифратор, второй триггер и второй элемент И, выход которого соединен с обнуляющим входом счетчика импульсов, причем выход приемопередатчика обнаружения соединен с входами первого измерителя азимута и счетчика импульсов, с первым входом первого измерителя дальности и вторым входом второго триггера, выход которого соединен также с входом включения приемопередатчика опознавания, выход преобразователя напряжение-код соединен с третьим входом индикатора,
вторыми входами приемопередатчика обнаружения и опознавания и входом синхронизатора, выход первого запоминающего блока соединен с вторым входом третьего блока вычитания, выходы третьего-шестого запоминающих блоков соединены с входами первого блока вычитания, выход приемопередатчика опознавания соединен с первым входом второго измерителя дальности и входом второго измерителя азимута, первый выход синхронизатора соединен с синхронизирующими входами первых измерителя дальности и измерителя азимута, второй выход синхронизатора соединен с синхронизирующими входами вторых измерителя дальности и измерителя азимута, третий выход синхронизатора соединен с входами считывания первого и третьего запоминающих блоков, четвертый выход синхронизатора соединен с входами считывания пятого и шестого запоминающих блоков, шестой выход синхронизатора соединен с входами записи первого, второго, третьего, четвертого, пятого и шестого запоминающих блоков, седьмой выход синхронизатора соединен с вторым входом первого трггера и восьмой выход синхронизатора соединен с вторым входом второго элемента И, при этом электрическая ось антенны опознавания сдвинута по азимуту относительно электрической оси антенны обнаружения в направлении, противоположном направлению вращения антенны, на угол не менее половины ширины диаграммы направленности антенны опознавания.
| Техническое описание боевой машины комплекса "ОСА-АК" | |||
| - Ижевск, ГП "ИЭМЗ", 1979. |
