Изобретение относится к радиолокационной технике и может быть использовано в системах управляемого оружия противовоздушной обороны (ПВО).
Аналогами системы являются системы управления зарубежных зенитных ракетных комплексов (ЗРК) ближнего действия "Кроталь" и "Роланд".
В силу действия ряда объективных факторов войсковая ПВО имеет очень мало времени для наблюдения и перехвата низколетящих СВН противника.
В связи с этим система управления войскового ЗРК ближнего действия для обеспечения эффективной борьбы с низколетящими СВН должна иметь малое время реакции.
В отдельных тактических ситуациях время реакции перечисленных аналогов оказывается слишком большим, что приводит к существенному снижению их эффективности при борьбе, например, с внезапно обнаруженными СВН противника.
Этот факт следует отнести к недостаткам систем управления этих ЗРК.
Из известных технических решений в качестве прототипа выбрана система управления войскового ЗРК ближнего действия "Оса-АКМ", поскольку она наиболее близка к предлагаемой системе.
Функциональная схема прототипа представлена на фиг.1, где приняты следующие обозначения: 1 радиолокатор обзора, 2 радиозапросчик опознавания, 3 радиолокатор слежения, 4 антенна обзора, 5 передатчик радиолокатора обзора, 6 приемник радиолокатора обзора, 7 программный переключатель угломестных парциальных диаграмм направленности антенны радиолокатора обзора, 8 антенна опознавания, 9 устройство включения передатчика радиозапросчика, 10 дешифратор радиозапросчика, 11 антенна слежения. 12 приемник радиолокатора слежения, 13 следящая система дальности, 14 следящая система азимута, 15 следящая система угла места, 16 устройство механического сканирования луча антенны радиолокатора слежения по углу места, 17 устройство ручного управления дальностью, 18 устройство ручного управления азимутом, 19 устройство ручного управления углом места, 20 устройство автозахвата по углу места, 21 вычислитель времени входа цели в зону пуска, 22 аппаратура предстартовой подготовки ракеты и производства пуска, 23 индикатор кругового обзора, 24 пульт управления, 25 индикатор дальности, 26 индикатор "гол места-дальность".
Прототип функционирует следующим образом.
Радиолокатор 1 обзора производит радиолокационное зондирование заданной области пространства путем периодического кругового по азимуту обзора этой области различными парциальными угломестными лучами антенны 4, переключаемыми по жесткой программе программным переключателем 7.
Радиолокационная информация с выхода радиолокатора 1 поступает на индикатор 23 кругового обзора и воспринимается с последнего оператором обнаружения.
Электрическая ось антенны радиозапросчика 8 жестко совмещена по азимуту с электрической осью антенны 4 радиолокатора. Поэтому после обнаружения цели в i-том цикле обзора оператор обнаружения в следующем (i+1)-ом цикле обзора производит опознавание цели путем выдачи вручную с пульта 24 управления команды на включение передатчика радиозапросчика. Выдача названной команды производится на интервале времени, когда диаграмма направленности антенны 8 опознавания совпадает с направлением на обнаруженную цель.
Радиолокационная информация опознавания с выхода радиозапросчика 2 поступает на индикатор 23 кругового обзора и наблюдается оператором обнаружения. После выполнения операции опознавания и принятия решения об обстреле обнаруженной цели операторы приступают к выполнению операций по ее захвату и переходу на автослежение радиолокатором 3.
Для этого оператор обнаружения выдает с пульта 24 управления в следящую систему 15 угла места команду, указывающую на номер угломестной парциальной диаграммы направленности антенны 4 обзора, которой в данный момент лоцируется выбранная цель. При этом тот же оператор с помощью устройства 18 управляет вручную положением электрической оси антенны 11 слежения по азимуту таким образом, чтобы совместить на индикаторе 23 кругового обзора с отметкой цели отметку обратного контроля, отображающую положение указанной антенны по азимуту.
Одновременно с этим оператор дальности, управляя устройством 17, совмещает на экране индикатора 23 кругового обзора с отметкой цели отметку обратного контроля, отображающую положение строба следящей системы 13 дальности на интервале рабочей дальности.
Следящая система 15 угла места автоматически устанавливает такое значение угла места антенны 11 слежения, которое соответствует углу места электрической оси парциальной диаграммы направленности антенны 4, заданной с пульта 24. При этом устройство 16 производит непрерывное сканирование луча антенны 11 по углу места в секторе, совпадающем с парциальной диаграммой направленности антенны 4, которая задана с пульта 24.
Оператор дальности наблюдает на экране индикатора 25 дальности сигнал цели, периодически появляющийся из-за сканирования луча по углу места, и накладывает на него следящий строб, манипулируя вручную устройством 17.
При появлении сигнала цели в следящем стробе срабатывает устройство автозахвата по углу места 20 и переводит радиолокатор 2 в режим непрерывного автослежения цели по трем координатам дальности, азимуту и углу места.
С этого момента координаты цели поступают с выхода радиолокатора 3 в вычислитель 21, который определяет момент времени вхождения цели в зону пуска и выдает в аппаратуру 22 команду на включение предстартовой подготовки ракеты и команду на разрешение пуска.
Описанный войсковой ЗРК, выбранный за прототип, обладает недостаточно малым временем реакции, чтобы вести эффективную борьбу с перспективными скоростными и малоразмерными СВН нового класса.
Причинами недостаточно малого времени реакции прототипа, которые устранены в предлагаемой системе, являются следующие факторы:
1. Антенна обзора в каждый данный момент излучает зондирующий сигнал и принимает эхо-сигналы только в одном угловом (по углу места) направлении. Это обстоятельство вынуждает просматривать заданное пространство обзора несколькими последовательно переключаемыми от одного оборота антенны к другому угломестными парциальными диаграммами направленности антенны, что увеличивает время просмотра зоны до величины KTβ, где К число угломестных парциальных лепестков антенны, Tβ период одного оборота по азимуту антенны обзора, с.
2. Операция обнаружения и опознавания цели производятся оператором, что приводит к дополнительным временным затратам при принятии соответствующих решений.
3. Операция опознавания цели производится только в следующем цикле обзора после ее обнаружения, так как электрические оси антенн обзора и опознавания совмещены по азимуту. Это обстоятельство увеличивает время реакции системы на величину KTβ.
4. Операции захвата выбранной цели и перевода на ее автослежение производятся операторами вручную, что также требует больших затрат времени.
5. Решение задачи вычисления момента времени вхождения цели в зону пуска начинается только после начала ее автослежения радиолокатором 3, что также увеличивает время реакции системы.
Целью изобретения является повышение боевой эффективности войскового ЗРК ближнего действия при борьбе с малоразмерными и скоростными целями нового класса за счет уменьшения времени реакции его системы управления.
Поставленная цель достигается тем, что в систему управления войскового зенитного ракетного комплекса ближнего действия, размещенную на одном самоходном шасси, содержащую радиолокатор обзора, включающий в себя передатчик, приемник, антенну и программный переключатель парциальных лучей антенны, радиолокационный запросчик опознавания, содержащий антенну, устройство включения передатчика и дешифратор, радиолокатор слежения, содержащий антенну, приемник и следящие системы дальности, азимута и угла места, вычислитель времени входа цели в зону пуска, связанный с выходом радиолокатора слежения, аппаратуру предстартовой подготовки ракет и производства пуска, связанную с выходом вычислителя,дополнительно введены последовательно соединенные обнаружитель сигналов, устройство отождествления, устройство слежения по дальности и азимуту, второй вычислитель времени входа цели в зону пуска, подключенный выходом к аппаратуре предстартовой подготовки ракет и производства пуска, последовательно соединенные программное устройство радиолокационного поиска и трехкоординатный вычислитель энергетического центра, при этом передатчик радиолокатора обзора выполнен в виде последовательно включенных генератора зондирующего сигнала, преобразователя частоты, подключенного другими входами к гетеродинам приемника, имеющего n каналов, и усилителя высокой частоты, подключенного выходом к вновь введенному устройству фазосдвигающему высокочастотному многоступенчатому, соединенному последовательно с линейно расположенными излучателями антенны, выход приемника радиолокатора обзора связан через обнаружитель сигналов с устройством включения передатчика радиолокационного запросчика опознавания, у которого дешифратор подключен к входу устройства отождествления, антенна развернута по азимуту относительно антенны радиолокатора обзора в направлении, противоположном вращению последней, антенна радиолокатора слежения выполнена в виде малоэлементной фазированной решетки, снабженной устройством электронного управления лучом, подключенным к выходу программного устройства радиолокационного поиска, входы трехкоординатного вычислителя энергетического центра подключены к выходам приемника радиолокатора слежения программного устройства радиолокационного поиска, а выход к следящим системам дальности, азимута и угла места, из которых первая и вторая подключены входом к устройству слежения по дальности и азимуту, а третья входом к устройству отождествления.
Обнаружитель сигналов содержит последовательно соединенные запоминающее устройство, электронный ключ, пороговое устройство, накопитель и измеритель дальности, последовательно соединенные электронный ключ, сумматор и умножитель, измеритель азимута, измеритель угла места и датчик константы, при этом вход второго электронного ключа подключен к выходу запоминающего устройства, выход умножителя подключен к второму входу порогового устройства, входы измерителя азимута и измерителя угла места подключены к выходу критериального накопителя, датчик константы подключен к второму входу умножителя, вход запоминающего устройства и второй вход измерителя угла места являются входами обнаружителя сигналов, связанными с выходами соответственно приемника радиолокатора обзора и программного переключателя парциальных лучей антенны обзора, выходы накопителя и измерителей дальности, азимута и угла места являются выходами обнаружителя сигналов, связанными со входами соответственно устройства включения передатчика радиозапросчика и устройства отождествления.
Устройство отождествления содержит последовательно соединенные измеритель дальности, запоминающее устройство, сумматор, пороговое устройство и схему И, последовательно соединенные измеритель азимута, второе запоминающее устройство, второй сумматор и второе пороговое устройство, два датчика констант, последовательно соединенные третье и четвертое запоминающие устройства, последовательно соединенные пятое и шестое запоминающие устройства и последовательно соединенные седьмое и восьмое запоминающее устройства, при этом выход второго порогового устройства подключен к второму входу схемы И, датчики констант подключены своими выходами к вторым входам соответственно первого и второго пороговых устройств, вход измерителя дальности подключен к входу измерителя азимута, выход третьего запоминающего устройства подключен к второму входу первого сумматора, выход пятого запоминающего устройства подключен к второму входу второго сумматора, выход схемы И подключен к вторым входам четвертого, шестого и восьмого запоминающих устройств, входы измерителя дальности третьего, пятого и седьмого запоминающих устройств являются входами устройства отождествления, связанными с соответствующими выходами дешифратора радиозапросчика опознавания и обнаружителя сигналов, а выходы четвертого, шестого и восьмого запоминающих устройств его выходами, связанными с входами соответственно устройства слежения по дальности и азимуту и следящей системы угла места радиолокатора слежения.
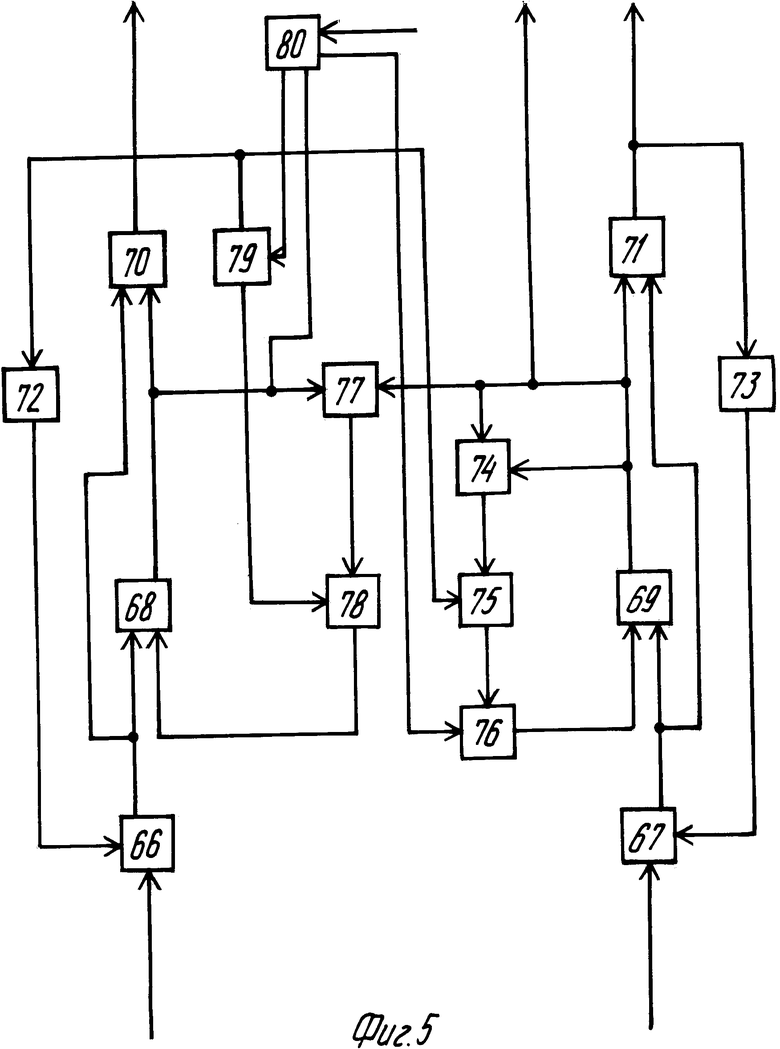
Устройство слежения по дальности и азимуту состоит из двух каналов, каждый из которых содержит последовательно соединенные дискриминатор, первый интегратор, второй интегратор, связанный входом с выходом дискриминатора и являющийся выходом канала, и формирователь строба, подключенный выходом к дискриминатору, соединенному вторым входом с соответствующим выходом устройства отождествления, при этом первый интегратор канала азимута через последовательно соединенные квадратор, первый умножитель и второй умножитель соединен выходом со своим входом, а через последовательно включенные третий умножитель и делитель со входом первого интегратора канала дальности, связанного выходом со входом третьего умножителя, и выход канала дальности соединен непосредственно со входом первого умножителя и через четвертый умножитель, связанный входом через косинусный элемент, подключенный выходом ко второму умножителю, с угломестным выходом устройства отождествления со входом делителя.
Вычислитель времени входа цели в зону пуска содержит последовательно включенные первый умножитель, первый делитель, сумматор и выходной делитель, связанный входом делителя с выходом построителя модуля вектора, соединенным через последовательно включенные второй делитель, второй умножитель и функциональный преобразователь двух аргументов, связанный вторым входом с выходом построителя модуля, ко второму входу сумматора, при этом вход делимого второго делителя и первый вход построителя модуля вектора через третий умножитель подключены к выходу первого интегратора канала азимута устройства слежения по дальности и азимуту, вход делителя первого делителя подключен к выходу построителя модуля вектора, входы первого, второго и третьего умножителей подключены к выходу второго интегратора канала дальности устройства слежения по дальности и азимуту, первый интегратор канала дальности которого подключен выходом ко входам первого умножителя и построителя вектора модуля.
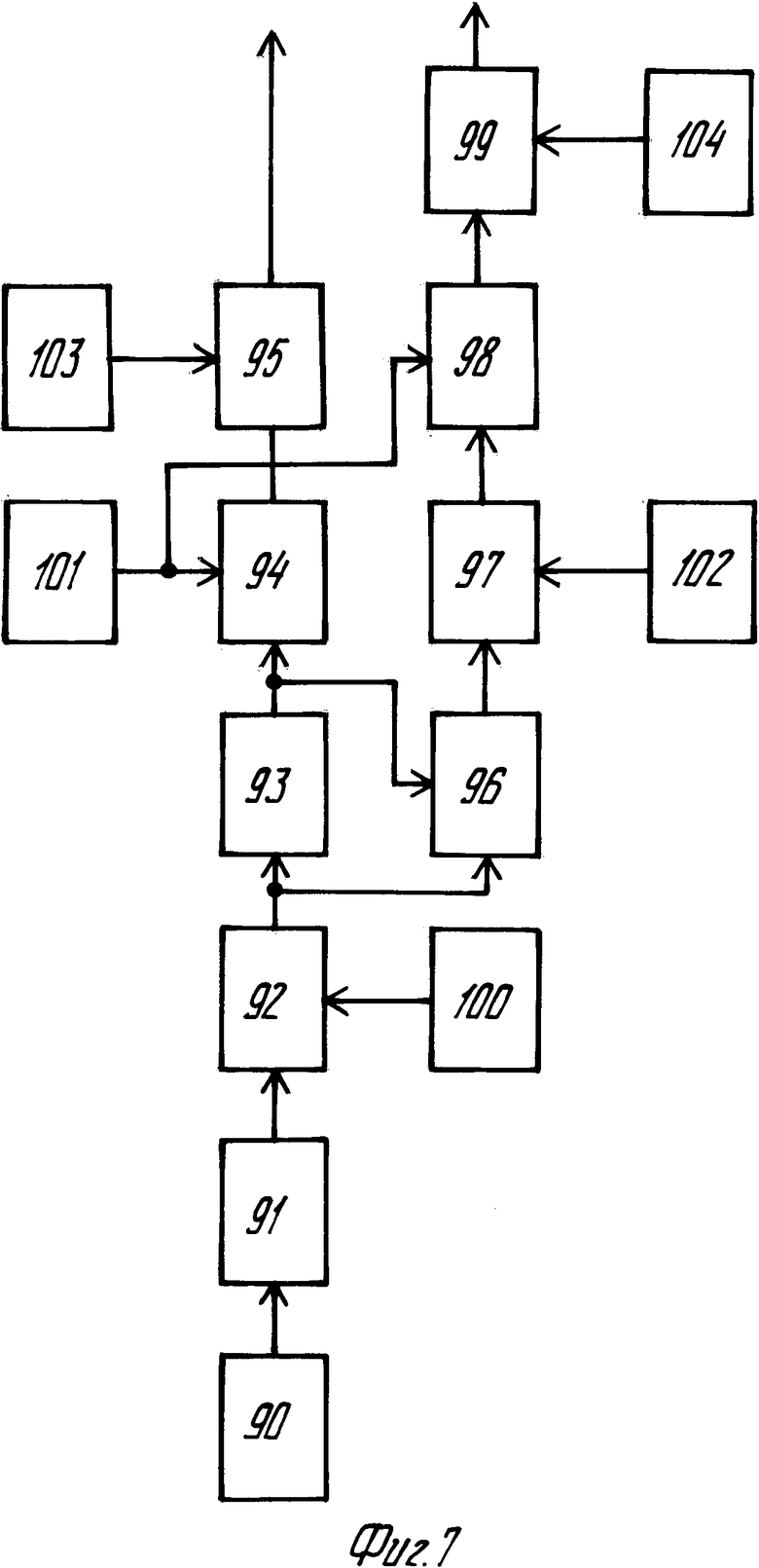
Программное устройство радиолокационного поиска состоит из пяти датчиков констант, последовательно соединенных генератора тактовой частоты, счетчика, умножителя, устройства выделения целой части числа, второго умножителя и сумматора, последовательно соединенных второго сумматора, третьего и четвертого умножителей и третьего сумматора, при этом второй вход первого умножителя соединен с первым датчиком константы, вторые входы второго и четвертого умножителей соединены со вторым датчиком константы, вход второго сумматора соединен с выходом первого умножителя, а второй вход второго сумматора соединен с выходом устройства выделения целой части числа, второй вход третьего умножителя соединен с третьим датчиком константы, вторые входы первого и третьего сумматоров соединены соответственно с четвертым и пятым датчиками констант, выходы первого и третьего сумматоров являются выходами программного устройства радиолокационного поиска, связанными с устройством управления лучом и трехкоординатным вычислителем энергетического центра.
Трехкоординатный вычислитель энергетического центра состоит из последовательно соединенных вычислителя быстрого преобразования Фурье, коммутатора, порогового устройства, измерителя дальности, умножителя, сумматора, делителя, второго умножителя и второго сумматора, последовательно соединенных третьего умножителя, третьего сумматора и второго делителя, последовательно соединенных четвертого умножителя, четвертого сумматора и третьего делителя, пятого, шестого и седьмого сумматоров, пятого умножителя и трех датчиков констант, причем входы пятого сумматора соединены с выходом вычислителя быстрого преобразования Фурье, выход пятого сумматора соединен со входом пятого умножителя, второй вход которого соединен с первым датчиком константы, выход пятого умножителя соединен со вторым входом порогового устройства, выход которого соединен со вторым входом первого умножителя и со входом шестого сумматора, выход которого соединен с делителем первого делителя, со входом седьмого сумматора и со вторыми входами третьего и четвертого умножителей, выход седьмого сумматора соединен с делителями второго и третьего делителей, второй вход второго умножителя соединен со вторым датчиком константы, второй вход второго сумматора соединен с третьим датчиком константы, входы вычислителя быстрого преобразования Фурье и третьего и четвертого умножителей являются входами трехкоординатного вычислителя энергетического центра, связанными с выходами соответственно приемника радиолокатора слежения и программного устройства радиолокационного поиска, а выходы второго и третьего делителя и второго сумматора его выходами, связанными с входами соответствующих следящих систем радиолокатора слежения.
Проведенные патентные исследования показали, что технические решения, содержащие отличительные признаки заявляемой системы и позволяющие достичь того же результата, не известны, что подтверждает наличие критерия "существенные отличия".
Функциональная схема заявляемой системы приведена на фиг.2, где приняты следующие обозначения: 1 15, 21 и 22 по прототипу, 27 устройство фазосдвигающее высокочастотное многоступенчатое, 28 усилитель высокой частоты, 29 преобразователь частоты, 30 генератор зондирующего сигнала, 31 обнаружитель сигналов, 32 устройство отождествления, 33 устройство слежения по дальности и азимуту, 34 вычислитель времени входа цели в зону пуска, 35 программное устройство радиолокационного поиска, 36 - трехкоординатный вычислитель энергетического центра, 37 устройство электронного управления лучом.
Функциональная схема обнаружителя сигналов представлена на фиг. 3, где приняты следующие обозначения: 38 запоминающее устройство, 39 электронный ключ, 40 пороговое устройство, 41 критериальный накопитель, 42 - измеритель дальности, 43 электронный ключ, 44 сумматор, 45 умножитель, 46 измеритель азимута, 47 измеритель угла места, 48 датчик константы.
Функциональная схема устройства отождествления представлена на фиг. 4, где приняты следующие обозначения: 49 измеритель дальности, 50 - запоминающее устройство, 51 сумматор, 52 пороговое устройство, 53 схема И, 54 измеритель азимута, 55 запоминающее устройство, 56 сумматор, 57 - пороговое устройство, 58,59,60,61,62 и 63 запоминающие устройства, 64 и 65 - датчики констант.
Функциональная схема устройства слежения по дальности и азимуту представлена на фиг. 5, где приняты следующие обозначения: 66 и 67 - дискриминаторы, 68,69,70 и 71 интеграторы, 72 и 73 формирователи стробов, 74 квадратор, 75,76,77 умножители, 78 делитель, 79 умножитель, 80 - косинусный элемент.
Функциональная схема вычислителя времени входа цели в зону пуска представлена на фиг. 6, где приняты следующие обозначения: 81 умножитель, 82 делитель, 83 сумматор, 84 делитель, 85 построитель модуля вектора, 86 делитель, 87 сумматор, 88 функциональный преобразователь двух аргументов, 89 умножитель.
Функциональная схема программного устройства радиолокационного поиска представлена на фиг.7 где приняты следующие обозначения: 90 генератор тактовой частоты, 91 счетчик, 92 умножитель, 93 устройство выделения целой части числа, 94 умножитель, 95 и 96 сумматоры, 97 и 98 умножители, 99 сумматор, 100, 101, 102, 103 и 104 датчики констант.
Функциональная схема трехкоординатного вычислителя энергетического центра представлена на фиг. 8, где приняты следующие обозначения: 105 вычислитель быстрого преобразования Фурье, 106 коммутатор, 107 пороговое устройство, 108 измеритель дальности, 109 умножитель, 110 сумматор, 111 делитель, 112 умножитель, 113 сумматор, 114 умножитель, 115 сумматор, 116 - делитель, 117 умножитель, 118 сумматор, 119 делитель, 120,121 и 122 - сумматор, 123 умножитель, 124,125 и 126 датчики констант.
Предлагаемая система функционирует следующим образом.
Передатчик 5 радиолокатора 1 обзора формирует зондирующий сигнал одновременно на нескольких несущих частотах. Благодаря наличию фазосдвигающего высокочастотного устройства 27 антенна 4 формирует луч, положение которого в угломестной плоскости зависит от несущей частоты.
В связи с этим зондирующий сигнал излучается одновременно в нескольких угловых по углу места направлениях.
Это обстоятельство позволяет выполнять радиолокационное зондирование пространства одновременно несколькими парциальными угломестными лепестками, что в конечном счете приводит к уменьшению времени просмотра заданного пространства обзора.
Радиолокационная информация с выхода радиолокатора 1 обзора поступает в обнаружитель 31 сигналов, который производит операции обнаружения сигналов и измерения координат обнаруженных целей, а также выдает в устройство 9 команду на включение передатчика радиозапросчика 3 опознавания для обеспечения автоматического опознавания обнаруженных целей.
Электрическая ось антенны 8 опознавания отклонена по азимуту от электрической оси антенны 4 обзора в направлении, противоположном направлению обзора по азимуту, на угол не меньший, чем половина потенциальной ширины луча антенны 8 опознавания в азимутальной плоскости.
Формирование указанной команды на включение передатчика опознавания начинается с момента обнаружения цели. Длительность этой команды равна интервалу времени, в течение которого происходит пересечение по азимуту обнаруженной цели лучом антенны 8 опознавания.
Благодаря всем перечисленным мерам производится автоматическое опознавание "на проходе" каждой обнаруженной цели, то есть опознавание в том же цикле обзора, в котором цель обнаружена.
Радиолокационная информация обнаружения и радиолокационная информация опознавания поступают в устройство 32 отождествления с выходом соответственно обнаружителя 31 сигналов и радиозапросчика 3.
Устройство 32 осуществляет отождествление обнаруженных целей и отметок опознавания, выносит решение о государственной принадлежности каждой из обнаруженных целей и выдает координаты "чужих" целей: координаты дальности и азимута в устройство 33, координата угла места в следящую систему 15 угла места радиолокатора 3 слежения.
Устройство 33, используя дискретный поток входной информации о координатах цели, которые поступают с темпом обзора, производит непрерывное слежение за этой целью по дальности и азимуту и вырабатывает для радиолокатора 3 слежения следующие данные целеуказания: сглаженные координаты дальности и азимута цели, первые производные сглаженных координат дальности и азимута цели.
Для вычислителя 34 вырабатывает следующие данные: сглаженную координату дальности цели, первые производные сглаженных координат дальности и азимута цели.
Вычислитель 34 по данным, получаемым от устройства 33, решает задачу оценки времени входа цели в зону пуска и оценки времени включения предстартовой подготовки ракеты.
Таким образом, эти задачи решаются еще до получения информации о координатах цели с выхода радиолокатора 3 слежения.
Данные целеуказания с выходов устройств 32 и 33 поступают на следящие системы соответственно 15, 13 и 14 и обрабатываются ими.
Для перехода на автоматическое слежение цели радиолокатором 3 слежения без участия оператора программное устройство 35 радиолокационного поиска организует поиск цели в пределах области пространства, обусловленной ошибками целеуказания. Устройство 35 последовательно вырабатывает координаты угловых положений ФАР 11, которые поступают в устройство 37 электронного управления лучом. В результате работы устройства 37 луч ФАР 11 направляется в заданное угловое направление.
В каждом угловом направлении радиолокатор 3 излучает зондирующий сигнал. Эхо-сигнал, принятый приемником 12, поступает в трехкоординатный вычислитель энергетического центра 36. Туда же поступают координаты луча ФАР из устройства 35.
Вычислитель 36 производит обнаружение сигнала цели и определение ее координат, используя при этом совместную обработку информации, полученной из нескольких угловых направлений и дискретов дальности.
Совместная обработка сводится к вычислению энергетического центра (центра тяжести пространственной фигуры). Координаты этого центра и являются уточненными координатами цели, которые поступают из вычислителя 36 в следящие системы 13, 14 и 15. Благодаря достаточной точности определения вычислителем 36 совместно с устройством 35 указанных координат цели, следящие системы 13, 14 и 15 переходят с этого момента на непрерывное автоматическое слежение цели.
Координаты цели с выхода радиолокатора 3 слежения поступают на вход вычислителя 21, который с этого момента решает те же задачи, что и вычислитель 34.
Примером конкретного выполнения заявляемой системы может служить система управления войскового ЗРК 9К330. В этой системе устройства 31, 32, 33, 34, 35, 36 и 37 согласно фиг. 2, составляющие ее существенную отличительную часть, выполнены в виде специализированных цифровых вычислителей.
Использование системы позволит уменьшить время реакции в 2-3 раза по сравнению с системой управления войскового ЗРК "Оса-АКМ", принятой за прототип, и тем самым повысить боевую эффективность ЗРК.
В настоящее время изготовлены 2 опытных образца заявляемой системы и проведены их натурные испытания путем реальных облетов и стрельб по реальным целям, в том числе и по малоразмерным в объеме программы Государственных испытаний ЗРК "Тор".
Испытания подтвердили, что система обеспечивает меньшее, чем у прототипа, время реакции, которое повышает боевую эффективность при борьбе с целями нового класса.
Система изготавливается серийно.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ОПОЗНАВАНИЯ ЦЕЛЕЙ | 1984 |
|
RU2121700C1 |
| УСТРОЙСТВО ДЛЯ ПУСКА РАКЕТ | 1981 |
|
RU2121647C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| УСТРОЙСТВО ОЦЕНКИ ДЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 2005 |
|
RU2304790C1 |
| Наземный радиолокационный обнаружитель | 2017 |
|
RU2714450C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2329454C2 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛЕЙ | 1988 |
|
RU2144202C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2540323C1 |





Изобретение относится к радиолокации и может использоваться в системах управляемого оружия противовоздушной обороны. Система управления содержит радиолокатор обзора, радиолокационный запросчик опознавания, радиолокатор слежения, вычислитель времени входа цели в зону, аппаратуру предстартовой подготовки ракеты и производства пуска, фазосдвигающее высокочастотное многоступенчатое устройство, обнаружитель сигналов, устройство отождествления, устройство слежения по дальности и азимуту, программное устройство радиолокационного поиска, трехкоординатный вычислитель энергетического центра и устройство электронного управления лучом. Данная система повышает боевую эффективность ракетных комплексов ближнего действия при борьбе с малоразмерными и скоростными целями нового класса за счет уменьшения времени реакции его системы управления. 8 ил.
Система управления войскового зенитного ракетного комплекса ближнего действия, размещенная на одном самоходном шасси, содержащая радиолокатор обзора, включающий в себя передатчик, приемник, антенну и программный переключатель парциальных лучей антенны, радиолокационный запросчик опознавания, содержащий антенну, устройство включения передатчика и дешифратор, радиолокатор слежения, содержащий антенну, приемник и следящие системы дальности, азимута и угла места, вычислитель времени входа цели в зону пуска, связанный с выходом радиолокатора слежения, аппаратуру предстартовой подготовки ракет и производства пуска, связанную с выходом вычислителя, отличающаяся тем, что, с целью повышения боевой эффективности зенитного ракетного комплекса за счет уменьшения времени реакции его системы управления, в нее дополнительно введены последовательно соединенные обнаружитель сигналов, устройство отождествления, устройство слежения по дальности и азимуту, второй вычислитель времени входа цели в зону пуска, подключенный выходом к аппаратуре предстартовой подготовки ракет и производства пуска, последовательно соединенные программное устройство радиолокационного поиска и трехкоординатный вычислитель энергетического центра, при этом передатчик радиолокатора обзора выполнен в виде последовательно включенных генератора зондирующих сигналов, преобразователя частоты, подключенного другими входами к гетеродинам приемника, имеющего n каналов, и усилителя высокой частоты, подключенного выходом к вновь введенному фазосдвигающему высокочастотному многоступенчатому устройству, соединенному последовательно с линейно расположенными излучателями антенны, выход приемника радиолокатора обзора связан через обнаружитель сигналов с устройством включения передатчика радиолокационного запросчика опознавания, у которого дешифратор подключен к входу устройства отождествления, антенна развернута по азимуту относительно антенны радиолокатора обзора в направлении, противоположном вращению последней, антенна радиолокатора слежения выполнена в виде малоэлементной фазированной решетки, снабженной устройством электронного управления лучом, подключенным к выходу программного устройства радиолокационного поиска, входы трехкоординатного вычислителя энергетического центра подключения к выходам приемника радиолокатора слежения и программного устройства радиолокационного поиска, а выход к следящим системам дальности, азимута и угла места, из которых первая и вторая подключены входом к устройству слежения по дальности и азимуту, а третья входом к устройству отождествления.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |

