Изобретение относится к области строительного производства и может быть использовано для определения местоположения рабочего органа, например пневмопробойника, в грунте при бестраншейной прокладке подземных коммуникаций.
Наиболее близким по технической сущности и достигаемому результату является способ определения положения рабочего органа в грунте, состоящий в том, что излучают в грунтовой массив радиосигнал и регистрируют сигнал, прошедший через массив приемным устройством с антенной, обрабатывают сигнал и определяют местоположение рабочего органа в плане и по вертикали (см. В.П. Честейшин. Малая механизация и приспособления при монтаже систем газоснабжения.- М.: Стройиздат, 1981, с. 91-92).
Недостатком способа по прототипу является его трудоемкость, обусловленная необходимостью периодического поиска рабочего органа, отсутствие непрерывной информации о положении рабочего органа, отсутствие непрерывной информации о положении рабочего органа, что усложняет управляемую проходку каналов в грунте, невозможность точного определения отклонения рабочего органа в плане и в вертикальной плоскости, а также невозможность задания требуемой траектории проходки каналов в грунте.
Известный способ обеспечивает получение только дискретной периодической информации о положении рабочего органа в грунте, в плане, т.к. излучения производятся каждые полчаса или при проходке 20 м.
В период между измерениями положение рабочего органа не контролируется, возможно его отклонение от необходимой траектории даже в пределах 1-1,5 м при разрешенном отклонении 0,20-0,5 м.
В основу изобретения поставлена задача усовершенствования способа определения положения рабочего органа в грунте, в котором за счет новой совокупности операций и условий их осуществления обеспечивается непрерывность определения местоположения рабочего органа как в плане, так и по вертикали при одновременном снижении погрешности измерений, повышение их точности и как следствие обеспечивается возможность задания траектории проходки в грунте со значительно меньшими потерями.
Поставленная задача решается тем, что в способе определения положения рабочего органа в грунте, состоящем в том, что в грунтовой массив излучают радиосигнал и регистрируют сигнал, прошедший через грунтовой массив приемным устройством с антенной, обрабатывают сигнал и определяют местоположение рабочего органа в плане и по вертикали, согласно изобретению новым является то, что вдоль траектории проходки симметрично горизонтальной проекции размещают не менее двух антенн, выполненных в виде однопроводных открытых линий, причем первая антенна запитана от генератора, формирующего синусоидальный сигнал, а вторая от генератора через управляемое фазосдвигающее устройство с обеспечением излучения сигнала в противофазе, при этом в вертикальной плоскости, проходящей через заданную траекторию движения рабочего органа, формируется зона нулевой напряженности суммарного радиосигнала, на рабочем органе устанавливают антенну приемного устройства, затем суммарный сигнал от двух антенн после прохождения через грунт регистрируют приемным устройством, по величине отличия суммарного сигнала от нуля определяют величину отклонения рабочего органа в плане, далее при помощи фазосдвигающего устройства изменяют сдвиг фаз до равенства нулю суммарного сигнала, а по величине сдвига фаз определяют направление отклонения рабочего органа от проектной траектории в плане.
Причинно-следственная связь между признаками заявляемого способа и достигаемым техническим результатом объясняется следующим.
Симметричное размещение антенн специальным образом выполненного передающего устройства обеспечивает в вертикальной плоскости формирование зоны нулевой напряженности суммарного радиосигнала, а одновременная установка на рабочем органе антенны приемного устройства, осуществляющего регистрацию отклонения суммарного сигнала от нулевого значения, позволяют непрерывно определять положение рабочего органа в плане. При этом передающие устройства выполнены так, что при измерении сдвига фаз до равенства нулю суммарного сигнала непрерывно определяют направления отклонения.
В результате применения предлагаемого способа отклонение рабочего органа от заданной траектории не выходит за пределы допустимого 0,1-0,3 м.
На чертеже приведена схема устройства для осуществления предлагаемого способа.
Способ реализуют с помощью устройства, которое состоит из однопроводных открытых антенн 1 и 2, приемной антенны 3, закрепленной на рабочем органе 4 и соединенной через перестраиваемый частотный фильтр 5 с приемным устройством 6. Выход приемного устройства 6 через усилитель 7 соединен с одним из входов устройства 8 сравнения, второй вход которого соединен через регулировочный резистор 9 с блоком опорного напряжения 10. Выход устройства 8 сравнения соединен с индикатором 11 отклонения рабочего органа в плане, со звуковым сигнализатором 12 и с электронным ключом 13, который через электромагнитный клапан 14 отключает привод рабочего органа 4. Питание антенны 1 осуществляется непосредственно от перестраиваемого по частоте генератора 15. Питание антенны 2 осуществляется от генератора 15 через фазосдвигающее устройство 16 регулируемой величиной сдвига фазы. На рабочем органе 4 установлен индуктивный трансформаторный датчик 17. Датчик 17 снабжен питающим генератором 18. Датчик 17 имеет два выхода, на первом из которых выходной сигнал появляется при отклонении рабочего органа 4 вверх, а на втором - при отклонении вниз. Выходы датчика 17 соединены с пороговыми усилителями 19 и 20, выходы которых соединены соответственно с индикаторами 21 и 22 отклонения рабочего органа 4 в вертикальной плоскости. Устройство снабжено управляющим ключом 23, который на период измерений включает генератор 18 и через электронный ключ 13 и электромагнитный клапан 14 отключает привод рабочего органа 4. На корпусе рабочего органа 4 закреплены якорь 24 индуктивного трансформаторного датчика 17 шарнирно в вертикальной плоскости и статор 25 жестко с возможностью регулировки.
Определение положения рабочего органа в грунте предлагаемым способом осуществляют следующим образом.
На поверхности грунта отмечают горизонтальную проекцию траектории проходки рабочего органа 4. Рабочий орган 4, например пневмопробойник, устанавливают в котлован на заданной отметке. При помощи кондуктора (на чертеже не показан) задают требуемое направление проходки. На дневной поверхности грунта устанавливают траектории движения рабочего органа 4 в грунте на расстоянии 1,1-1,25 от средней глубины проходки друг от друга. Включают привод (на чертеже не показан) и вводят рабочий орган 4 в стенку котлована на одну длину рабочего органа. Затем привод отключают и производят настройку измерительной системы, т.е. формируют зону нулевой напряженности суммарного радиосигнала. Для этого включают генератор 15 и настраивают его на необходимую частоту. Оптимальной является такая частота радиосигнала, при которой расстояние между антеннами 1 и 2 равно длине волны радиосигнала. На эту же частоту настраивают узкополосный частотный фильтр 5. Фазосдвигающее устройство 16 настраивают так, чтобы сдвиг фазы радиосигнала на антенне 2 относительно радиосигнала на антенне 1 равнялся 180o. При этом в вертикальной плоскости, проходящей через траектории движения рабочего органа 4 формируется зона нулевой суммарной амплитуды радиосигнала вследствие сложения двух противофазных сигналов. Поэтому электродвижущая сила, наводимая в приемной антенне 3, выполненной в виде рамочной антенны, суммарным радиосигналом от антенн 1 и 2, будет равна нулю при нахождении рабочего органа 4 на заданной траектории в плане. Регулировочным резистором 9 устанавливают на втором входе устройства 8 сравнения напряжение, соответствующее допустимому отклонению рабочего органа 4 от заданной траектории в плане.
Статор 25 датчика 17 устанавливают так, чтобы его ось в исходном положении совпала с вертикальной осью якоря 24.
После окончания настройки измерительной системы включают привод рабочего органа 4. При движении рабочего органа 4 по заданной траектории в плане антенна 3 будет находиться в зоне нулевой суммарной амплитуды радиосигналов, а значит, электродвижущая сила, индукцируемая в ней радиосигналами, будет равна нулю и на выходе приемного устройства 6 и усилителя 7 сигнал будет отсутствовать. Приемным устройством 6 с приемной антенной 3 регистрируют суммарный сигнал от двух антенн 1, 2 после прохождения через грунт. По величине отличия суммарного сигнала от нуля определяют величину отклонения рабочего органа в плане. При отклонении рабочего органа 4 от заданной траектории в плане приемная антенна 3 выйдет из зоны нулевой суммарной амплитуды радиосигналов и в ней будет индукцироваться электродвижущая сила тем большая, чем больше отклонение рабочего органа 4 от заданной траектории в плане. Сигнал от антенны 3 через частотный фильтр 5, приемное устройство 6 и усилитель 7 поступает на первый вход устройства 8 сравнения, на второй вход которого через резистор 9 подается напряжение, соответствующее величине допустимого отклонения рабочего органа 4 от заданной траектории в плане. Если напряжение сигнала на первом входе устройства 8 сравнения превысит напряжение на его втором входе, на выходе устройства 8 сравнения появится сигнал, который включит индикатор 11, звуковой сигнализатор 12 и посредством электронного ключа 13 и электромагнитного клапана 14 отключит привод рабочего органа 4. Далее при помощи фазосдвигающего устройства 16 изменяют сдвиг фаз до равенства нулю суммарного сигнала, а по величине сдвига фаз определяют направление отклонения рабочего органа 4 от проектной траектории в плане. Для этого регулировкой фазосдвигающего устройства 16 добиваются такого сдвига фаз радиосигналов на антеннах 1 и 2, при котором в месте расположения рабочего органа 4 опять возникает зона нулевой суммарной амплитуды радиосигнала. При этом уменьшение сдвига фаз радиосигналов будет свидетельствовать об отклонении рабочего органа 4 в сторону антенны 1, а увеличение сдвига фаз - об отклонении в сторону антенны 2.
Для определения отклонения рабочего органа 4 в вертикальной плоскости управляющим ключом 23 периодически включают генератор 18 и посредством электронного ключа 13 и электромагнитного клапана 14 отключают привод рабочего органа 4.
При наличии отклонения рабочего органа 4 в вертикальной плоскости якорь 24 индуктивного трансформаторного датчика 17 смещается относительно статора 25 и в зависимости от направления смещения на одном из выходов датчика 17 появляется сигнал, амплитуда которого тем больше, чем больше смещение рабочего органа 4. В зависимости от направления смещения сигнал от датчика 17 появится на входе одного из пороговых усилителей 19 или 20 и, если амплитуда сигнала выше порога срабатывания усилителя, включается один из индикаторов 21 или 22. Порог срабатывания усилителей 19 и 20 устанавливается в зависимости от допустимой величины отклонения рабочего органа 4 в вертикальной плоскости.
После окончания измерений при отсутствии отклонений управляющим ключом 23 через ключ 13 и клапан 14 включают привод рабочего органа 4 и выключают генератор 18.
Последующие измерения отклонений в вертикальной плоскости производят аналогично. Определения положения рабочего органа в плане производят непрерывно. Измерения отклонения рабочего органа в вертикальной плоскости производят периодически, в зависимости от требуемой точности.
Таким образом, предлагаемый способ позволяет снизить трудоемкость определения положения рабочего органа за счет исключения операции поиска рабочего органа на поверхности грунта, повысить информативность за счет определения смещения рабочего органа в плане и в вертикальной плоскости, а также обеспечить возможность задания траектории движения рабочего органа в грунте.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ НЕФТЕСОДЕРЖАЩИХ СТОЧНЫХ ВОД | 1996 |
|
RU2116975C1 |
| СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДОВ И СБОРОЧНО-МОНТАЖНАЯ ОСНАСТКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2123630C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА И ГИДРОИСПЫТАНИЙ ТРУБОПРОВОДОВ | 1996 |
|
RU2122078C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА И ДЕМОНТАЖА РАСТРУБНЫХ ТРУБ | 1996 |
|
RU2122077C1 |
| Селективное по направлению антенное устройство для приема радиосигналов | 1985 |
|
SU1252841A1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ И УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ПОЛНОГО ВЕКТОРА СКОРОСТИ МЕТЕОРОЛОГИЧЕСКОГО ОБЪЕКТА | 2014 |
|
RU2602274C1 |
| СПОСОБ НАВИГАЦИИ ТРАНСПОРТНОЙ И ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ ПО ОДНОПРОВОДНОЙ ЛИНИИ РАДИОПЕРЕДАЧИ | 2023 |
|
RU2814649C1 |
| СПОСОБ СТРЕЛЬБЫ ИЗ АРТИЛЛЕРИЙСКОГО ОРУДИЯ И АРТИЛЛЕРИЙСКАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2319100C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ АНТЕННЫХ ХАРАКТЕРИСТИК НА ИЗМЕРИТЕЛЬНОЙ ПЛОЩАДКЕ | 2023 |
|
RU2804836C1 |
| Буксируемое плавучее кабельное антенное устройство | 2023 |
|
RU2813857C1 |
Изобретение относится к строительному производству и предназначено для определения местоположения рабочего органа, например пневмопробойника, в грунте при бестраншейной прокладке подземных коммуникаций. Задачей изобретения является снижение погрешности измерений, повышение их точности, обеспечение возможности задания траектории проходки в грунте с минимальными потерями. Для осуществления способа на поверхности грунта отмечают горизонтальную проекцию траектории движения рабочего органа. Симметрично ей размещают не менее двух антенн, выполненных в виде однопроводных открытых линий. Первая антенна запитана от генератора, формирующего синусоидальный сигнал, вторая антенна запитана от генератора через управляемое фазосдвигающее устройство с обеспечением излучения сигнала в противофазе. В вертикальной плоскости, проходящей через заданную траекторию движения рабочего органа, формируется зона нулевой напряженности суммарного радиосигнала. На рабочем органе устанавливают антенну приемного устройства, приводят в движение рабочий орган и излучают в грунтовый массив радиосигнал. Суммарный сигнал от двух антенн после прохождения через грунт регистрируют приемным устройством. По величине отличия суммарного сигнала от нуля определяют величину отклонения рабочего органа в плане. При помощи управляемого фазосдвигающего устройства изменяют сдвиг фаз до равенства нулю суммарного сигнала. По величине сдвига фаз определяют направление отклонения рабочего органа от проектной траектории в плане. 1 ил.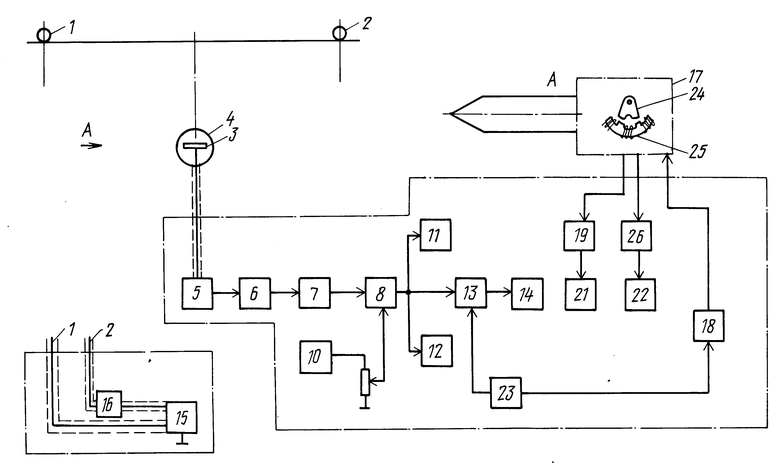
Способ определения положения рабочего органа в грунте, состоящий в том, что излучают в грунтовой массив радиосигнал и регистрируют сигнал, прошедший через грунтовой массив приемным устройством с антенной, обрабатывают сигнал и определяют местоположение рабочего органа в плане и по вертикали, отличающийся тем, что вдоль траектории проходки симметрично горизонтальной проекции размещают не менее двух антенн, выполненных в виде однопроводных открытых линий, причем первая антенна запитана от генератора, формирующего синусоидальный сигнал, а вторая - от генератора через управляемое фазосдвигающее устройство с обеспечением излучения сигнала в противофазе, при этом в вертикальной плоскости, проходящей через заданную траекторию движения рабочего органа, формируется зона нулевой напряженности суммарного радиосигнала, на рабочем органе устанавливают антенну приемного устройства, затем суммарный сигнал от двух антенн после прохождения через грунт регистрируют приемным устройством, по величине отличия суммарного сигнала от нуля определяют величину отклонения рабочего органа в плане, далее при помощи фазосдвигающего устройства изменяют сдвиг фаз до равенства нулю суммарного сигнала, а по величине сдвига определяют направление отклонения рабочего органа от проектной траектории в плане.
| Честейшин В.П | |||
| Малая механизация и приспособления при монтаже систем газоснабжения | |||
| - М.: Стройиздат, 1981, с | |||
| Огнетушитель | 0 |
|
SU91A1 |
| Кабелеукладчик | 1980 |
|
SU861501A1 |
| SU 1146383 A, 23.03.85 | |||
| Способ автоматического управления положением рабочего органа землеройной машины | 1985 |
|
SU1328450A1 |
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| RU 94006653 A1, 10.01.96. | |||
