Изобретение относится к механи зации и автоматизации технологических процессов гидромелиоративного .строительства.
Цель изобретения - повьппение точности управления путем поддержания оптимального угла резания рабочего органа.
Из пучка оптического излучения до- полнительно формируют плоскость, сканируемую в вертикальном направлении
соосно с трассой движения землеройной машины. С помощью чувствительных элементов фотоприемного устройства измеряют временные интервалы между моментами контакта сканируемой в вертикальном направлении плоскости с первым по ходу сканирования и вторым чувствительными элементами, вторым и третьим чувствительными элементами, сравнивает эти временные интервалы и на основании сравнения фор мируют управляющий сигнал на изменение углового положения рабочего органа .
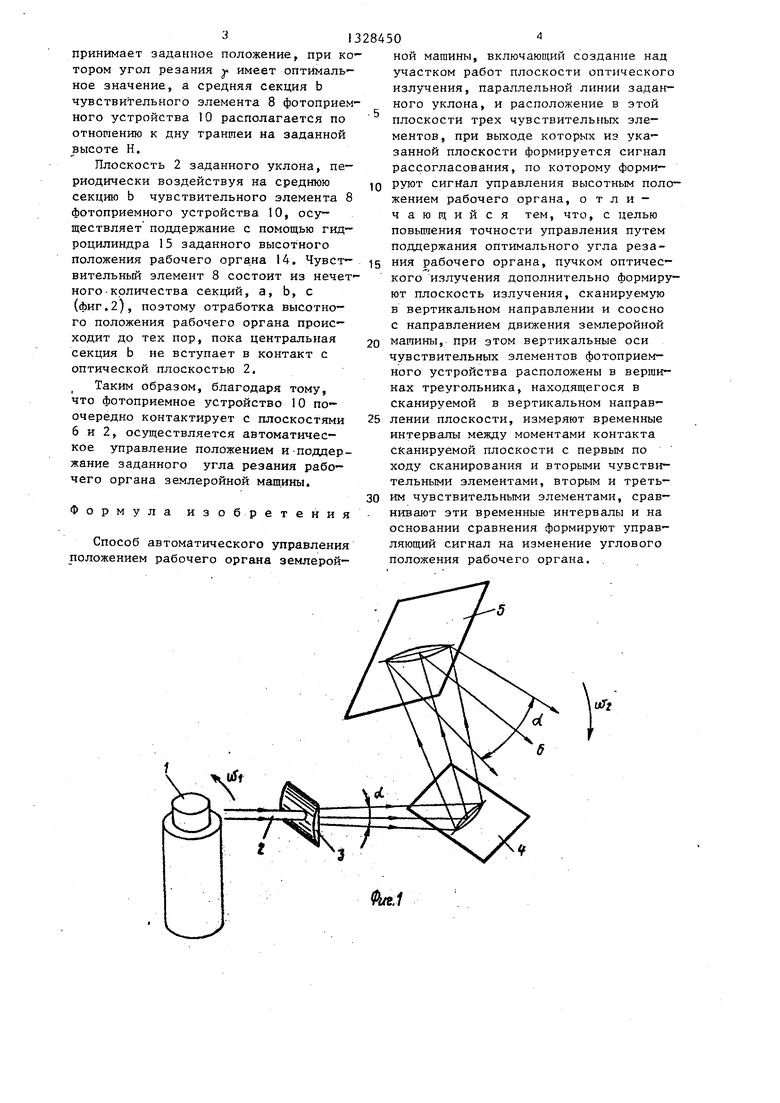
На фиг.1 показано формирование плоскости излучения, сканируемой в вертикальном направлении; на фиг. 2 - фотоприемное устройство с чувствительными элементами; на фиг.З схема устройства,, реализующего предлагаемый способ.
Устройство, реализующее способ автоматического управления высотным положением и поддержания оптимального угла резания рабочего органа землеройной машины, состоит из передатчика оптического излучения {фиг.1) содержащего вращающуюся вокруг вертикальной оси головку 1, плоскости 2 излучения, параллельной линии заданного уклона, цилиндрической линзы 3 и двух плоских зеркал 4 и 5, плоскости 6 оптического излучения, сканируемой в верт -шальном направлении чувствительных элементов 7-9, расположенных в вершинах равностороннего треугольника, являющегося фотоприемным устройством 10, при этом вертикальные оси чувствительных элементов находятся в плоскости треугольника.
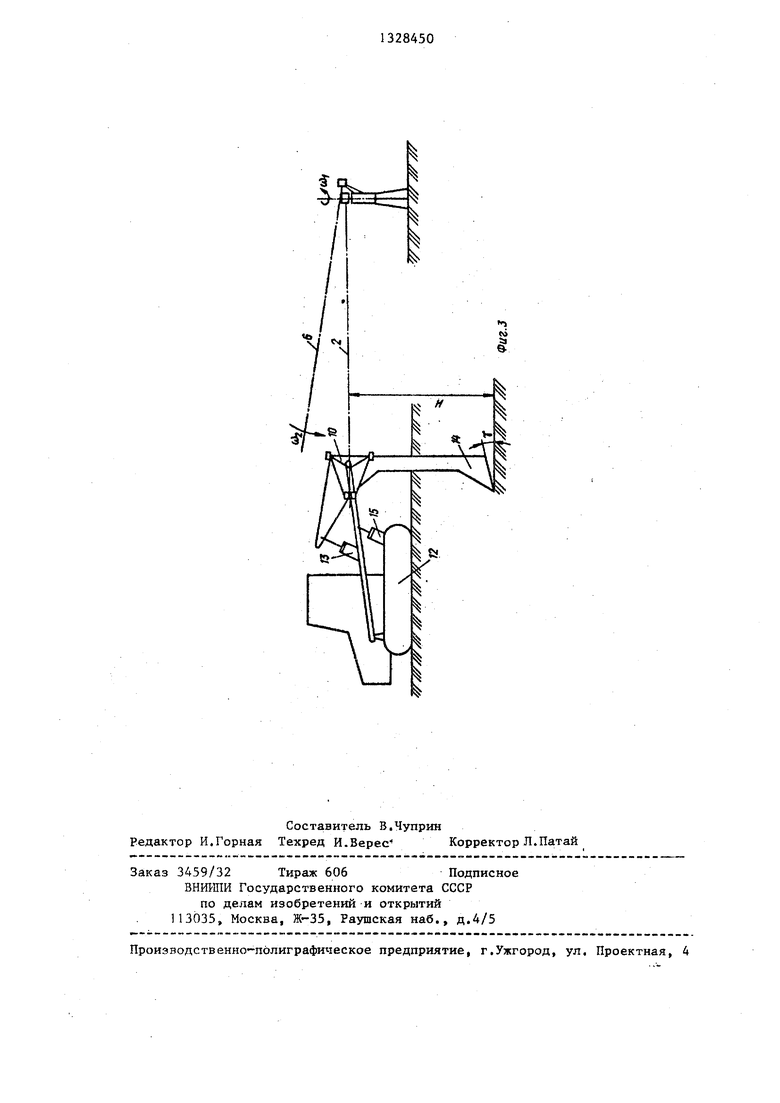
Фотоприемное устройство 10 кинематически связано с рабочим органом землеройной машины (фиг.З) так, что при изменении углового положения рабочего органа на угол /i, устройство 10 так же поворачивается по отноше
5
0
нию к горизонту на угол /} . Плоскость фотоприемного устройства 1 О перпендикулярна плоскости 2 оптического излучения и параллельна продольной оси землеройной машины.
Первый . 7 и третий 9 по ходу оптического излучения плоскости 6 чувствительные элементы фотоприемни- ка 10 состоят лишь из одной секции, а чувствительный элемент содержит как минимум три секции, собранные в вертикальную матрицу (например,секции а,Ь и с на фиг.2а). Электрические сигналы, образованные в результате воздействия оптической вертикальной плоскости 6 на чувствительные элементы 7-9, поступают на узел 11 обработки и сравнения (фиг.2б).
Устройство работает следующим образом.
При вращении головки 1 источника оптического излучения (фиг.) вок5 руг вертикальной оси в пространстве над участком работ создается плоскость 2, параллельная дну отрьшаемой траншеи, а с помощью цилиндрической линзы 3 и двух плоских зеркал 4 и 5 .-
0 оптическая плоскость 6, сканированная в вертикальном направлении, распространяющаяся вдоль трассы движения землеройной машины 12 (фиг.З). При сканировании в вертикальном.
5 .направлении оптическая плоскость 6 поочередно пересекает чувствительные элементы 7-9 фотоприемного устройства 1 О (фиг.2), и электрические импульсы, сформированные в результа-
0 те контакта оптического излучения с секциями чувствительных элементов фотоприемника, поступают на узел 11 обработки и сравнения, в котором производится измерение временных ин45 тервалов между моментами контакта оптического излучения с чувствительными элементами 7 и 8, 8 и 9 и фор- мирование сигнала для управления угловым положением рабочего органа.
50 В случае равенства временных интервалов f и f. команда на измене - ние углового положения рабочего органа не формируется, Ьри неравенстве этих интервалов (f 2 формируggBTCя управляющее воздействие на гидросистему 13 с целью изменения углового положения рабочего органа так, чтобы интервалы f и f. стали равны. В результате рабочий орган 14
принимает заданное положение, при котором угол резания имеет оптимальное значение, а средняя секция Ь чувствительного элемента 8 фотоприемного устройства 10 располагается по отношению к дну траншеи на заданной высоте Н.
Плоскость 2 заданного уклона, периодически воздействуя на среднюю секцию b чувствительного элемента 8 фотоприемного устройства 10, осуществляет поддержание с помощью гидроцилиндра 15 заданного высотного положения рабочего орга.на 14. Чувст- вительньй элемент 8 состоит из нечетного -количества секций, а, Ь, с (фиг.2), поэтому отработка высотного положения рабочего органа происходит до тех пор, пока центральная секция Ь не вступает в контакт с оптической плоскостью 2,
Таким образом, благодаря тому, что фотоприемное устройство 10 поочередно контактирует с плоскостями 6 и 2, осуществляется автоматическое управление положением и-поддержание заданного угла резания рабочего органа землеройной машины.
Формула изобретения
Способ автоматического управления положением рабочего органа землерой5
0
ной машины, включающий создание над участком работ плоскости оптического излучения, параллельной линии заданного уклона, и расположение в этой плоскости трех чувствительных элементов , при выходе которых из указанной плоскости формируется сигнал рассогласования, по которому формируют сигнал управления высотным положением рабочего органа, отличающийся тем, что, с целью повышения точности управления путем поддержания оптимального угла реза5 ния рабочего органа, пучком оптического излучения дополнительно формируют плоскость излучения, сканируемую в вертикальном направлении и соосно с направлением движения землеройной
0 машины, при этом вертикальные оси чувствительных элементов фотоприемного устройства расположены в вершинах треугольника, находящегося в сканируемой в вертикальном направ-
5 лении плоскости, измеряют временные интервалы между моментами контакта сканируемой плоскости с первым по ходу сканирования и вторыми чувствительными элементами, вторым и треть-
0 им чувствительными элементами, сравнивают эти временные интервалы и на основании сравнения формируют управляющий сигнал на изменение углового положения рабочего органа. .
lUT
:
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| Система дистанционного управления положением рабочего органа землеройной машины | 1984 |
|
SU1305540A1 |
| Устройство для управления рабочим органом землеройной машины | 1979 |
|
SU941941A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ С ПОМОЩЬЮ СПУТНИКОВЫХ СИСТЕМ НАВИГАЦИИ GPS/ГЛОНАСС ИЛИ СВЕТОВЫХ, НАПРИМЕР ЛАЗЕРНЫХ, ИЗЛУЧАТЕЛЕЙ | 2011 |
|
RU2465410C1 |
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| Система автоматизации планировочных работ | 1983 |
|
SU1099014A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ | 2014 |
|
RU2566153C1 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
| Устройство для управления движущимися объектами | 1980 |
|
SU906268A1 |
| Система управления курсом движения землеройных машин | 1989 |
|
SU1647092A1 |
Изобретение относится к области механизации и автоматизации технологических процессов гидромелиоративного строительства. Цель изобретения - повышение точности управления путем поддержания оптимального угла резания рабочего органа (РО). Для этого из пучка оптического излуче- ния дополнительно формируют плоскость 6, сканируемую в вертикальном направлении соосно с трассой землеройной машины. С помощью чувствительных элементов (ЧЭ) 7-9 фотоприемного устройства 10 измеряют временные интервалы между моментами контакта плоскости 6 с первым по ходу сканирования и вторым ЧЭ, вторым и третьим ЧЭ. При этом вертикальные оси ЧЭ 7-9 расположены в вершинах треугольника, находящегося в плоскости 6. Сравнивают измеренные интервалы в узле 11 обработки и сравнения и по сигналу рассогласования формируют управляющий сигнал на изменение углового положения РО. Плоскость заданного уклона, воздействуя на средний ЧЭ 8, поддерживает заданное . высотное положение РО. Т.обр., устр- во 10 поочередно контактирует с плоскостью 6 и плоскостью заданного уклона, осуществляя автоматическое управление положением РО и поддержание заданного угла резания. 3 ил. I (Л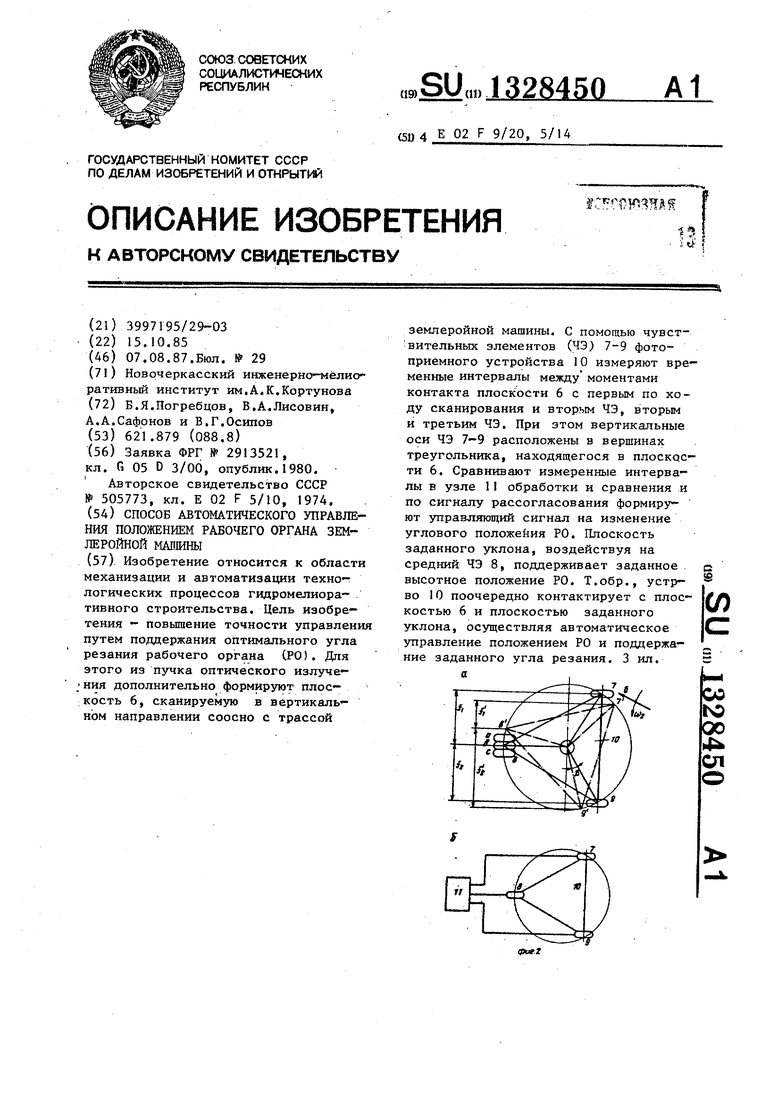
Составитель В.Чуприн Редактор И.Горная Техред И.Верес Корректор Л.Патай
Заказ 3459/32 Тираж 606Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж -35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
| Заявка ФРГ № 2913521, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для регулирования глубины копания траншей | 1974 |
|
SU505773A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
