Область техники
Изобретение относится к области радиолокации метеорологических объектов, в частности к способам и устройствам для измерения направления и скорости их перемещения, например для обеспечения безопасности полетов авиации.
Предшествующий уровень техники
Необходимость измерения направления и скорости движения метеорологических объектов (далее МО) вызвана требованиями обеспечения безопасности полетов, что особенно важно в зонах посадки летательных аппаратов, при полетах на малых высотах, для метеорологического обеспечения воздухоплавания.
Известны методы дистанционного измерения скорости МО, основанные на применении радаров, использующих измерители доплеровского сдвига частоты отраженного от МО сигнала для оценки радиальной составляющей скорости движения МО. Повышение требований к безопасности полетов приводит к необходимости повышения функциональных возможностей метеорологических радаров путем обеспечения измерения полного вектора скорости движения МО.
При радиолокационном наблюдении МО направление и величина полного вектора скорости движения МО в пространстве определяются направлением и величиной его трех ортогональных составляющих, из которых радиальная составляющая совпадает с направлением излучения метеорологического радара, а две другие - вертикальная и горизонтальная составляющие - лежат в плоскости, ортогональной к направлению излучения. Особенностью измерения полного вектора скорости движения МО с помощью радара является практическая сложность непосредственного измерения его составляющих, ортогональных к направлению излучения.
Как правило, с помощью когерентных метеорологических радаров непосредственно измеряют доплеровский сдвиг частоты отраженного радиосигнала, по величине этого сдвига вычисляют значение радиальной составляющей полного вектора скорости МО.
Для измерения ортогональных к направлению излучения составляющих вектора скорости используют многопозиционные метеорологические радары, либо методы расчета по результатам последовательных измерений в большой области пространства, что требует повышения материальных и/или временных затрат и не обеспечивает точности измерений, достаточной для метеорологического обеспечения авиации.
В известных способах дистанционного измерения скорости и направления ветра (RU 2017169, C1; RU 2449311, С1), в радаре слежения за дождем (GB 2320830, А) и в бортовом доплеровском метеорологическом радаре системы обнаружения сдвига ветра (WO 94/24582) по результатам наблюдения МО одним метеорологическим радаром с помощью многократных измерений строят траекторию движения МО и по параметрам траектории рассчитывают полный вектор скорости, при этом полное время измерения достигает десятков минут.
В способе обнаружения и определения атмосферных аномалий на расстоянии (US 2011/0291879, А1) по результатам наблюдения МО с помощью одного подвижного метеорологического радара многократно измеряют радиальные составляющие скорости в различных точках некоторой области пространства и по ним вычисляют средние значения ортогональных составляющих вектора скорости для этой области.
Полный вектор скорости определяют по результатам наблюдения МО комплексом расположенных определенным образом стационарных многопозиционных метеорологических радаров за один интервал наблюдения (US 2012/0086596, A1; US, 6070461, В1). Частным случаем таких систем являются системы с использованием одного передатчика и множества приемников радиолокационного сигнала (US 5471211, В1), или многолучевой антенны (US 2011/0172920, A1).
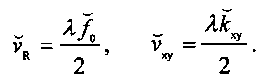
Наиболее близкими к настоящему изобретению являются известные способ и устройство для обработки отраженного радиолокационного сигнала (US 2011/0304501, A1), обеспечивающие определение скорости МО на основе обработки результатов измерений доплеровского сдвига частоты отраженного от МО сигнала. Конфигурация известного устройства представлена на Фиг. 1.
Согласно описанной в этом патенте технологии, импульсный сигнал, созданный генератором импульсных сигналов 1, модулирует несущую частоту передатчика 2. После усиления мощности в передатчике 2 полученный радиолокационный зондирующий сигнал излучается в пространство антенной 3 через циркулятор 4.
Отраженный от МО сигнал, полученный антенной 3, посылают через циркулятор 4 на приемник 5. Приемник 5 усиливает сигнал, полученный антенной 3, и осуществляет преобразование его несущей частоты в базовую частоту, а также разрешает принимаемые отраженные от МО сигналы по дальности (разделяют по времени их задержки), выделяя в пространстве элементы разрешения МО, ограниченные диаграммой направленности антенны и разрешенными участками по дальности. Выходные данные из приемника 5 поступают в устройство обработки сигнала 6, которое преобразует входной сигнал в цифровую форму с помощью аналого-цифрового преобразователя 7. Эти цифровые данные в формирователе данных 8 форматируются в цифровой пакет данных, который поступает в процессор наблюдений 9. В процессоре наблюдений 9 вычисляется спектр частот принимаемого сигнала для каждого элемента разрешения по дальности и для интервала накопления сигнала во времени длительностью Т. Для этого спектра рассчитывают его средний доплеровский сдвиг частоты. Из значения среднего доплеровского сдвига частоты рассчитывают значение радиальной составляющей скорости движения МО, находящегося в элементе разрешения. При этом длительность интервала времени накопления сигнала Т определяет разрешающую способность устройства по частоте и, следовательно, точность измерения радиальной составляющей скорости.
Недостатком указанного технического решения является невозможность измерения полного вектора скорости МО, находящегося в элементе разрешения.
Раскрытие изобретения
Целью настоящего изобретения является повышение точности дистанционной оценки скорости МО, обнаруживаемого радаром в разрешенной по дальности области пространства, и получение значений трех составляющих полного вектора скорости МО с помощью только одного радиолокатора без сканирования диаграммой направленности антенны.
При создании изобретения была поставлена техническая задача разработки способа дистанционного радиолокационного измерения полного вектора скорости МО на основе измерения пространственного распределения радиальной составляющей скорости отражающих участков МО в пределах луча диаграммы направленности без сканирования, с получением значений трех составляющих полного вектора скорости МО с помощью только одного устройства для его осуществления.
Ожидаемым техническим результатом изобретения являлась высокая точность и малое время измерения составляющих полного вектора скорости движения МО.
Поставленная задача была решена разработкой радиолокационного способа дистанционного измерения полного вектора скорости метеорологического объекта, в котором:
- излучают в пространство когерентный зондирующий импульсный радиолокационный сигнал;
- принимают, усиливают и когерентно детектируют радиосигналы, отраженные от метеорологического объекта, выделяют в них канал разрешения по дальности в соответствии с временем их задержки и преобразуют сигналы в канале разрешения по дальности в цифровую форму данных;
- определяют полный вектор скорости метеорологического объекта путем обработки полученных данных,
отличающегося тем, что:
- прием отраженных радиосигналов производят одновременно в суммарной диаграмме направленности антенны и в двух разностных диаграммах направленности антенны, в вертикальной и горизонтальной плоскостях, в течение заданного времени накопления отраженных радиосигналов;
- направляют принятые радиосигналы раздельно в соответствующие диаграммам направленности антенны разностный вертикальный, разностный горизонтальный и суммарный приемные каналы, в которых обеспечивают их усиление, когерентное детектирование, выделение канала разрешения по дальности в соответствии с временем задержки приема радиосигналов в каждом указанном приемном канале, и осуществляют цифровое преобразование указанных принятых радиосигналов в массивы исходных данных в каждом соответствующем приемном канале для выделенного канала разрешения по дальности;
- осуществляют узкополосную фильтрацию указанных массивов исходных данных в М каналах фильтрации, имеющих в указанных трех приемных каналах одинаковый набор центральных частот настройки фильтров, при этом для выделенного канала разрешения по дальности в каждом приемном канале определяют спектры частот сигналов в виде М значений амплитуд спектра частот в каждом из указанных каналов фильтрации;
- сравнивают средние значения указанных амплитуд спектров частот сигналов в указанных разностных вертикальном и горизонтальном приемных каналах для выделенного канала разрешения по дальности и производят поворот всех диаграмм направленности антенны вокруг оси излучения до достижения максимальной разности средних значений амплитуд указанных спектров в разностном вертикальном и разностном горизонтальном каналах, осуществляя при этом непрерывно указанные действия по излучению зондирующего сигнала, раздельному приему отраженных сигналов в приемных каналах в соответствии с диаграммами направленности антенны в течение указанного интервала времени накопления, по выделению в них канала разрешения по дальности в соответствии с временем задержки их приема, по цифровому преобразованию указанных принятых радиосигналов в массивы исходных данных и по указанной фильтрации;
- определяют значение угла поворота диаграмм направленности антенны при достигнутой указанной максимальной разнице средних значений амплитуд указанных спектров в указанных разностном вертикальном и разностном горизонтальном каналах и из указанных двух разностных приемных каналов один разностный приемный канал, имеющий большее среднее значение амплитуд спектра частот, выбирают в качестве измерительного канала, в отношении которого производят следующие действия:
- в указанных суммарном и измерительном приемных каналах, для каждой из М пар фильтров, имеющих одинаковую центральную частоту настройки, для выделенного канала разрешения по дальности, определяют М значений угла прихода сигнала путем совместной обработки амплитуд спектров частот сигналов суммарного и измерительного каналов моноимпульсным методом;
- определяют значения модуля радиальной составляющей скорости и модуля ортогональной к ней тангенциальной составляющей скорости метеорологического объекта путем совместной обработки М полученных значений угла прихода сигнала с применением метода линейного регрессионного анализа;
- определяют полный вектор скорости метеорологического объекта путем расчета значений модулей векторов вертикальной и горизонтальной составляющих его скорости на основе тригонометрических соотношений полученных значений модуля тангенциальной составляющей скорости метеорологического объекта и указанного угла поворота антенны.
Поставленная задача была также решена созданием устройства для дистанционного измерения полного вектора скорости метеорологического объекта, выполненного в виде метеорологического радара, содержащего:
- генератор импульсного сигнала, модулирующий сигнал передатчика;
- передатчик, обеспечивающий формирование когерентного зондирующего сигнала;
- антенну, излучающую зондирующий радиолокационный сигнал в пространство и принимающую радиосигналы, отраженные от метеорологического объекта;
- приемное устройство, обеспечивающее усиление, когерентное детектирование принятых радиосигналов, выделение в них канала разрешения по дальности в соответствии с временем их задержки и цифровое преобразование указанных отраженных радиосигналов в массивы исходных данных в каждом соответствующем приемном канале для выделенного канала разрешения по дальности;
- устройство обработки полученных данных для определения полного вектора скорости метеорологического объекта,
отличающегося тем, что:
- в качестве антенны содержит моноимпульсную угломерную антенну, обеспечивающую прием отраженных от метеорологических объектов сигналов одновременно в суммарной диаграмме направленности антенны и в двух разностных диаграммах направленности антенны, в вертикальной и горизонтальной плоскостях, и снабженную устройством поворота указанных трех диаграмм направленности антенны вокруг оси излучения зондирующего сигнала;
- приемное устройство содержит три идентичных приемных канала, обеспечивающих раздельное усиление, когерентное детектирование сигналов, принятых, соответственно, по указанным суммарной и разностным диаграммам направленности антенны, выделение в них канала разрешения по дальности в соответствии с временем их задержки, и цифровое преобразование указанных принятых радиосигналов в массивы исходных данных в каждом соответствующем приемном канале для выделенного канала разрешения по дальности;
- устройство обработки данных содержит:
- блок цифровых фильтров, включающий М фильтров в каждом суммарном, разностном вертикальном и разностном горизонтальном каналах, обеспечивающих узкополосную фильтрацию каждого указанного массива исходных данных в соответствующем приемном канале с получением М значений амплитуд спектров частот радиосигналов для выделенного канала разрешения по дальности;
- блок управления антенной, обеспечивающий:
- сравнение средних значений М амплитуд указанных спектров частот сигналов в фильтрах разностных вертикального и горизонтального каналов и подачу на устройство поворота диаграмм направленности антенны управляющего сигнала, обеспечивающего поворот диаграмм направленности антенны вокруг оси излучения зондирующего сигнала до достижения максимальной разности средних значений амплитуд указанных спектров частот сигналов в фильтрах разностного вертикального и разностного горизонтального каналов;
- выбор из указанных двух разностных каналов одного разностного канала, имеющего большее значение средней амплитуды спектра частот в фильтрах, в качестве измерительного канала;
- определение значения угла поворота диаграмм направленности антенны;
- вычислитель, обеспечивающий последовательно:
- определение М значений угла прихода сигнала путем совместной обработки амплитуд спектров частот сигналов суммарного и измерительного каналов моноимпульсным методом, для каждой из М пар фильтров в каналах фильтрации в указанных суммарном и измерительном приемных каналах, имеющих одинаковую центральную частоту настройки, для выделенного канала разрешения по дальности;
- определение значения модуля радиальной составляющей и модуля ортогональной к ней тангенциальной составляющей скорости метеорологического объекта путем совместной обработки М полученных значений угла прихода сигнала с применением метода линейного регрессионного анализа;
- определение полного вектора скорости метеорологического объекта путем расчета значений модулей векторов вертикальной и горизонтальной составляющих его скорости на основе тригонометрических соотношений для полученных значений модуля тангенциальной составляющей скорости метеорологического объекта и для указанного угла поворота антенны.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием осуществления радиолокационного способа дистанционного измерения полного вектора скорости метеорологического объекта согласно изобретению и устройства для его осуществления согласно изобретению, выполненного в виде метеорологического радара, и прилагаемыми чертежами, на которых:
Фиг. 1 - схема известного метеорологического радара (предшествующий уровень техники);
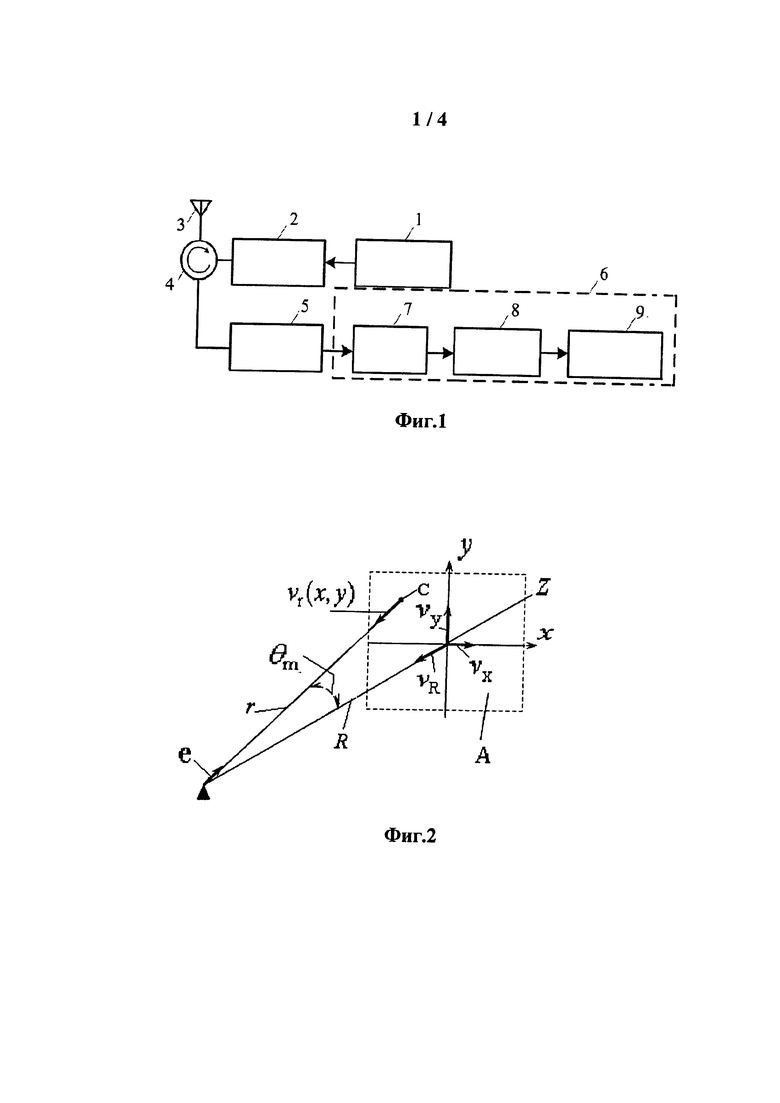
Фиг. 2 - схема наблюдения объекта согласно изобретению, система координат и составляющие вектора скорости МО согласно изобретению;
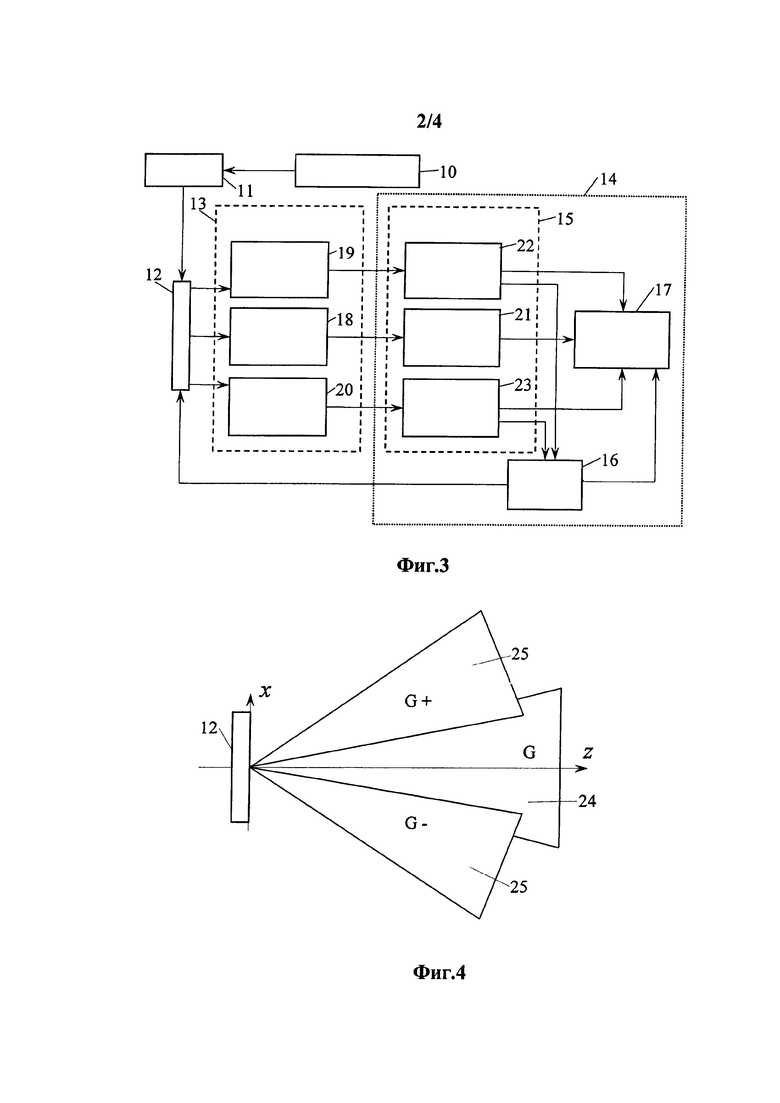
Фиг. 3 - схема метеорологического радара согласно изобретению;
Фиг. 4 - сечения суммарной и разностной диаграмм направленности антенны в горизонтальной плоскости;
Фиг. 5 - схема поворота диаграмм направленности антенны;
Фиг. 6 - пространственное распределение значений доплеровского сдвига частоты сигнала, отраженного от МО, имеющего вид плоской поверхности, нормальной к оси излучения;
Фиг. 7 - пример выходных сигналов цифровых фильтров;
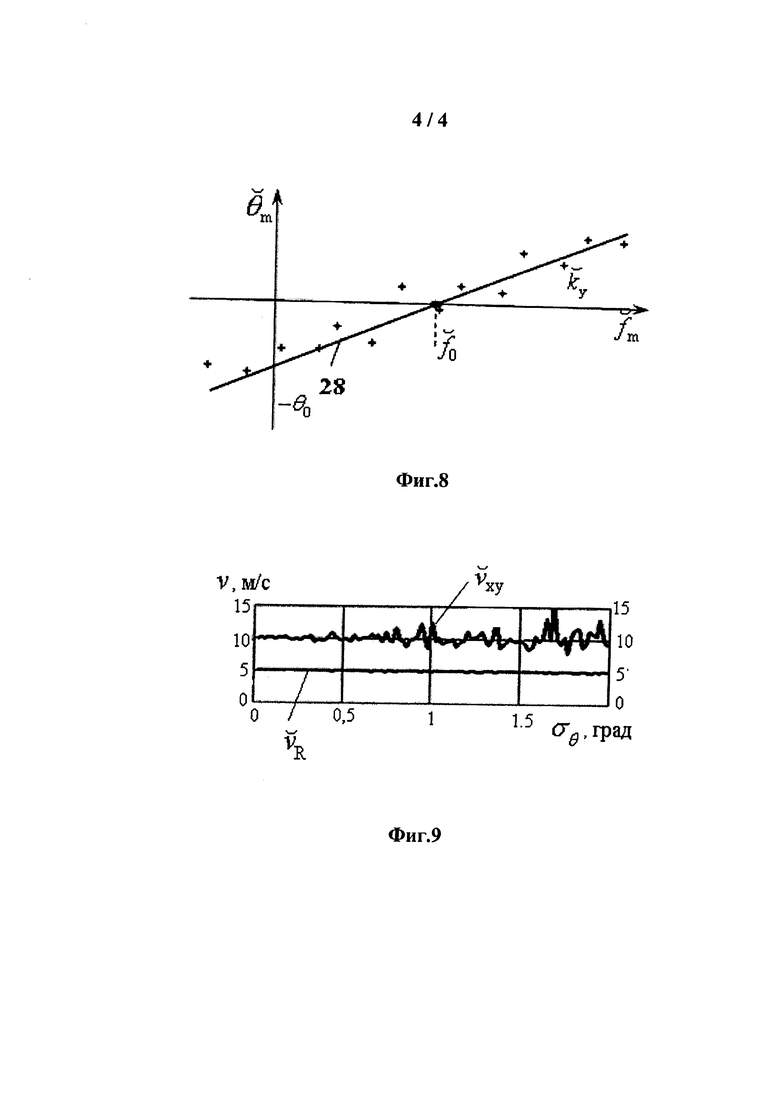
Фиг. 8 - схема применения метода линейного регрессионного анализа для аппроксимации зависимости измеренных значений углов прихода сигналов от их частоты;
Фиг. 9 - рассчитанные значения составляющих вектора скорости движения МО в зависимости от точности измерения угла прихода сигналов (имитационное моделирование).
При этом приведенные примеры осуществления способа и примеры выполнения метеорологического радара для его осуществления не являются исчерпывающими, не ограничивают возможностей изобретения и не выходят за рамки формулы изобретения.
Наилучший вариант осуществления изобретения
Радиолокационный способ дистанционного измерения полного вектора скорости метеорологического объекта согласно изобретению предназначен для определения скорости метеорологического объекта, схема наблюдения которого в соответствии со способом согласно изобретению, представлена на Фиг. 2.
В качестве модели метеорологического объекта была выбрана плоскость А, нормальная к оси z излучения, что является справедливым для достаточно распространенных случаев, когда характер движения МО неизменен по глубине в пределах относительно небольшого элемента разрешения метеорологического радара по дальности. Плоскость А была расположена на расстоянии R от антенны метеорологического радара. Направление и величина полного вектора скорости плоскости А определяются его тремя ортогональными составляющими νR, νx, νy, из которых радиальная составляющая νR совпадает с осью z, а вертикальная νy и горизонтальная νx составляющие лежат в плоскости, ортогональной к оси z излучения.
В когерентных метеорологических радарах измеряют доплеровский сдвиг частоты отраженного радиосигнала. По величине этого сдвига вычисляют значение радиальной составляющей скорости движения νR. Для измерения вертикальной νy и горизонтальной νx составляющих полного вектора скорости используют многопозиционные метеорологические радары, что требует значительных материальных затрат, либо используют методы расчета по результатам последовательных измерений в большой области пространства, что не обеспечивает измерений в небольшой области пространства, ограниченной размерами элемента разрешения метеорологического радара.
В способе дистанционного измерения полного вектора скорости МО согласно изобретению использован принцип пространственно-временной обработки сигналов, отраженных от МО, в активном радаре с моноимпульсной в двух плоскостях приемной антенной. При этом пространственно-временная обработка включала измерения моноимпульсным методом углового положения элементов МО, разделенных по признаку равных доплеровских сдвигов частоты отраженного сигнала. По построенной таким образом зависимости «угол-частота» методом линейного регрессионного анализа вычисляли радиальную составляющую и две ортогональные к ней составляющие полного вектора скорости.
Для обеспечения требуемой точности измерений использована система вращения диаграмм направленности антенны вокруг оси излучения зондирующего сигнала по критерию максимизации интенсивности сигнала в одном из приемных каналов, принятом за измерительный.
Способ дистанционного измерения полного вектора скорости МО согласно изобретению может быть реализован с помощью устройства согласно изобретению, выполненного в виде метеорологического радара, схема которого представлена на Фиг. 3.
При этом метеорологический радар согласно изобретению (Фиг. 3) содержит: генератор 10 импульсного сигнала, передатчик 11, антенну 12, приемное устройство 13, устройство 14 обработки данных, включающее блок 15 цифровых фильтров, блок 16 управления антенной 12, вычислитель 17.
При этом генератор 10 обеспечивает формирование импульсного сигнала, модулирующего сигнал передатчика 11, передатчик 11 обеспечивает формирование когерентного зондирующего сигнала. В качестве генератора импульсных сигналов 10 и передатчика 11 могут быть использованы известные твердотельные импульсные когерентные генераторы и усилители мощности.
Антенна 12 приспособлена для излучения зондирующего радиолокационного сигнала в пространство и, в отличие от прототипа, для приема отраженных от МО радиосигналов тремя диаграммами направленности: суммарной диаграммой направленности, разностной вертикальной и разностной горизонтальной диаграммами направленности, и снабжена устройством поворота антенны 12 (не показано), обеспечивающем поворот всех диаграмм направленности антенны 12 вокруг оси z излучения зондирующего сигнала (Фиг. 2) в произвольно выбранном направлении.
В качестве антенны 12 может быть использована моноимпульсная угломерная антенна типа фазированной антенной решетки с электронным управлением лучами диаграмм направленности.
Приемное устройство 13 содержит приемник 18 суммарного приемного канала, приемник 19 разностного вертикального приемного канала и приемник 20 разностного горизонтального приемного канала, обеспечивающих усиление, когерентное детектирование принимаемых сигналов, выделение в этих сигналах канала разрешения по дальности (по времени задержки их приема) и цифровое преобразование указанных принятых радиосигналов в массивы исходных данных в каждом соответствующем приемном канале для выделенного канала разрешения по дальности.
В качестве приемников 18, 19 и 20 могут быть использованы усилители промежуточной частоты с устройствами стробирования сигналов по времени задержки и аналогово-цифровыми преобразователями сигналов на выходе.
Блок 15 цифровых фильтров содержит фильтры 21 суммарного приемного канала, фильтры 22 разностного вертикального приемного канала и фильтры 23 разностного горизонтального канала, обеспечивавшие узкополосную фильтрацию каждого массива цифровых данных в соответствующем приемном канале с получением спектров частот сигналов в виде М значений амплитуд спектров частот.
В качестве блока 15 цифровых фильтров может быть использовано вычислительное устройство, обеспечивающее выполнение вычислительных операций в соответствии с алгоритмами операций способа согласно изобретению.
Блок 16 управления антенной 12 приспособлен для осуществления следующих операций:
- сравнения средних значений М амплитуд указанных спектров частот сигналов в разностных вертикальном и горизонтальном приемных каналах и подачи на устройство поворота диаграмм направленности антенны 12 управляющего сигнала, обеспечивающего поворот антенны 12 вокруг оси z излучения зондирующего сигнала до достижения максимальной разности средних значений амплитуд указанных спектров частот сигналов в разностном вертикальном приемном канале и в разностном горизонтальном приемном канале;
- выбора из указанных двух разностных приемных каналов одного разностного приемного канала, имеющего большее значение средней амплитуды спектра частот, в качестве измерительного канала;
- определения значения угла поворота диаграмм направленности антенны 12.
Вычислитель 17, в качестве которого использовали вычислительное устройство, приспособлено для осуществления последовательно следующих операций:
- определения М значений угла прихода сигнала путем совместной обработки амплитуд спектров частот сигналов суммарного и измерительного каналов моноимпульсным методом, для каждой из М пар фильтров в каналах фильтрации в указанных суммарном и измерительном приемных каналах, имеющих одинаковую центральную частоту настройки, для выделенного канала разрешения по дальности;
- определения значения модуля радиальной составляющей νR (Фиг. 2) и модуля ортогональной к ней тангенциальной составляющей скорости метеорологического объекта путем совместной обработки М полученных значений угла прихода сигнала с применением метода линейного регрессионного анализа;
- определения полного вектора скорости метеорологического объекта путем расчета значений модулей векторов вертикальной νy и горизонтальной νx составляющих его скорости на основе тригонометрических соотношений для полученных значений модуля тангенциальной составляющей скорости метеорологического объекта и для указанного угла поворота антенны.
Радиолокационный способ дистанционного измерения полного вектора скорости МО согласно изобретению осуществляли по схеме, показанной на Фиг. 3, следующим образом.
Генерируемый генератором 10 и модулированный в передатчике 11 радиолокационный импульсный когерентный зондирующий сигнал излучали в пространство с помощью антенны 12 и принимали отраженные от МО радиосигналы раздельно тремя диаграммами направленности антенны 12: суммарной диаграммой направленности, разностной вертикальной и разностной горизонтальной диаграммами направленности.
На Фиг. 4 показаны сечения суммарной (G) 24 и разностной горизонтальной 25 диаграмм направленности антенны 12 горизонтальной плоскостью (x, z). Для разностной горизонтальной диаграммы направленности 25 показаны сечения ее положительного G+ и отрицательного G- лепестков. Сечения вертикальной плоскостью (y, z) суммарной диаграммы направленности и разностной вертикальной диаграмм направленности (на чертеже не показаны) выглядели идентично сечениям, показанным на Фиг. 4. При этом, согласно изобретению, с помощью устройства поворота антенны 12 возможен поворот всех ее диаграмм направленности вокруг оси z излучения зондирующего сигнала.
В приемном устройстве 13 осуществляли раздельно в приемниках 18, 19, 20 усиление, когерентное детектирование принятых по указанным трем диаграммам направленности отраженных сигналов, выделение в этих сигналах канала разрешения по дальности путем стробирования принимаемых сигналов по времени задержки их приема, и преобразование сигналов в массивы цифровых данных для каждого приемного канала в канале разрешения по дальности.
В блоке 15 цифровых фильтров для участка сигнала длительностью Т раздельно в фильтрах 21, 22, 23 из массива цифровых данных рассчитывали М значений амплитуд спектра частот сигнала в указанном канале разрешения по дальности.
В блоке 16 управления антенной 12 осуществляли сравнение средних значений амплитуд спектров частот сигналов на выходе цифровых фильтров 22 и 23 разностных вертикального и горизонтального каналов и подавали на устройство поворота антенны 12 управляющий сигнал, обеспечивавший поворот всех трех диаграмм направленности антенны 12 вокруг оси z излучения зондирующего сигнала, как показано на Фиг. 5. Это приводило к изменению положения вертикального 26 и горизонтального 27 равносигнальных направлений диаграмм направленности антенны 12.
При этом в течение времени поворота антенны 12 для каждого ее положения повторяли описанные выше операции способа согласно изобретению: по излучению зондирующего сигнала антенной 12; по приему отраженных от МО радиосигналов тремя диаграммами направленности антенны 12: суммарной, разностной вертикальной и разностной горизонтальной; по усилению и когерентному детектированию принятых сигналов, по выделению в этих сигналах канала разрешения дальности (по времени задержки приема сигналов), и цифровому преобразованию сигналов, принятых каждым приемным каналом, в приемниках 18, 19 и 20 в массивы цифровых данных для канала разрешения дальности, а также в блоке 15 цифровых фильтров определяли М значений амплитуд спектров частот этих сигналов. При этом для каждого положения антенны 12 повторяли операцию сравнения средних значений амплитуд спектров частот сигналов на выходе цифровых фильтров 22 и 23 разностных вертикального и горизонтального каналов. Поворот антенны 12 вокруг оси излучения z производили до достижения максимальной разности средних значений амплитуд указанных спектров. По завершении поворота антенны 12 из двух разностных приемных каналов - вертикального и горизонтального - выбирали в качестве измерительного канала один разностный приемный канал, в котором среднее значение амплитуд спектра было наибольшим: например, в показанном на Фиг. 5 примере в качестве измерительного канала был выбран разностный горизонтальный канал 23, и определяли значение угла θxy поворота антенны 12, при котором была достигнута указанная максимальная разница средних значений амплитуд указанных спектров. Для дальнейших вычислений равносигнальное направление измерительного канала 27 обозначали осью ξ, направление которой совпадало с направлением вектора vxy - составляющей вектора скорости МО в плоскости, ортогональной к оси z излучения зондирующего сигнала.
Для определения полного вектора скорости МО в вычислителе 17 использовали связь значений доплеровского сдвига частоты сигнала, отраженного от точки С на поверхности А, между ее координатами (R, x, y) и вектором скорости МО v={νR, νx, νy} (Фиг. 2).
Как следует из схемы наблюдения, показанной на Фиг. 2, когда угловой размер отражающей поверхности А невелик - не превышает нескольких градусов, каждая отражающая точка МО на плоскости А с координатами x={R, x, y} имеет одинаковый вектор скорости v={νR, νx, νy}, неизменный за время наблюдения Т, т.е. v=const(f, x).
Направление «радар - отражающая точка С, находящаяся на расстоянии r», задавали вектором e={eR, ex, ey}, определенном направляющими косинусами:

Значение радиальной составляющей νr(x, y) скорости отражающей точки С определяли векторным произведением вектора v на вектор e:
Такому значению радиальной составляющей νr(x, y) скорости отражающей точки С соответствовало значение доплеровского сдвига частоты  сигнала, отраженного от точки С
сигнала, отраженного от точки С
где λ - длина волны излучения радиолокационной станции.
На Фиг. 6 в качестве примера связи значений доплеровского сдвига частоты сигнала , отраженного от точки C на поверхности A, с ее координатами (x, y), приведено изображение пространственного распределения значений доплеровского сдвига частоты  - так называемой «частотной поверхности» - при наблюдении МО с помощью метеорологического радара согласно схеме, показанной на Фиг. 2, при R=10 км, длине волны зондирующего сигнала λ=0.03 м, при размере зоны обзора 700×700 м, что соответствует ширине суммарной диаграммы направленности антенны θ0≈4° в горизонтальном и вертикальном направлении. При этом составляющие полного вектора скорости МО были: νR=5 м/с, νx=10 м/с, νy=20 м/с.
- так называемой «частотной поверхности» - при наблюдении МО с помощью метеорологического радара согласно схеме, показанной на Фиг. 2, при R=10 км, длине волны зондирующего сигнала λ=0.03 м, при размере зоны обзора 700×700 м, что соответствует ширине суммарной диаграммы направленности антенны θ0≈4° в горизонтальном и вертикальном направлении. При этом составляющие полного вектора скорости МО были: νR=5 м/с, νx=10 м/с, νy=20 м/с.
Как показано на Фиг. 6, пространственное распределение значений доплеровского сдвига частоты имело вид несколько искривленной (почти плоской) частотной поверхности, поднятой по оси частот на 333 Гц и наклоненной относительно осей x и y.
Диапазон изменения доплеровского сдвига частоты принятого сигнала составлял 99 Гц. При заданном времени накопления сигнала Т=0.5 с разрешающая способность фильтров по частоте в блоке 15 цифровых фильтров составляла 2 Гц, что позволяло получать 50 независимых значений такого спектра на выходе каждого из цифровых фильтров 21, 22 и 23.
Таким образом, вид пространственного распределения значений доплеровского сдвига частот чувствителен ко всем составляющим вектора скорости МО. При этом диапазон изменения частот составлял десятки герц при скорости движения МО, составлявшей единицы метров в секунду, что позволяло реализовать радиолокационное измерение полного вектора скорости.
На Фиг. 7 приведен пример значений амплитуд SΣ спектров сигналов на выходе цифровых фильтров 21 суммарного приемного канала, значений SΔv амплитуд спектров сигналов на выходе цифровых фильтров 22 разностного вертикального приемного канала и значений амплитуд SΔh спектров сигналов на выходе цифровых фильтров 23 разностного горизонтального приемного канала в зависимости от частоты  настройки фильтров, где m=1…M. При этом были использованы значения составляющих скорости движения МО: νR=5 м/с, νx=10 м/c, νy=0 м/с. Значения амплитуд спектра приведены в относительных единицах в одинаковом масштабе.
настройки фильтров, где m=1…M. При этом были использованы значения составляющих скорости движения МО: νR=5 м/с, νx=10 м/c, νy=0 м/с. Значения амплитуд спектра приведены в относительных единицах в одинаковом масштабе.
В этом примере на выходе фильтра 22 разностного вертикального приемного канала, где значение вертикальной составляющей вектора скорости МО νy=0 м/с, среднее значение SΔv амплитуд спектра сигнала было равно нулю. Крутизна наклона графика SΔh для разностного горизонтального приемного канала была пропорциональна величине модуля вектора тангенциальной составляющей νxy скорости МО.
В вычислителе 17 на основе совместной обработки спектров сигналов SΣ суммарного приемного канала 21 и цифровых фильтров измерительного канала (в данном примере - фильтров разностного горизонтального приемного канала 23) моноимпульсным методом определяли углы  прихода отраженных от МО сигналов для каждой пары фильтров с одинаковой частотой настройки
прихода отраженных от МО сигналов для каждой пары фильтров с одинаковой частотой настройки  .
.
На Фиг. 8 приведен пример зависимости значений угла как функции от - частоты настройки фильтра измерительного канала. Звездочками отмечены измеренные с некоторой ошибкой значения углов , которые образовывали М - размерный вектор  оценок углов, называемый «облако оценок углов». Облако оценок углов аппроксимировалось частотной линией 28 (Фиг. 8), образованной сечением частотной поверхности плоскостью, проходящей через оси (ξ, z).
оценок углов, называемый «облако оценок углов». Облако оценок углов аппроксимировалось частотной линией 28 (Фиг. 8), образованной сечением частотной поверхности плоскостью, проходящей через оси (ξ, z).
Затем на основе значений углов определяли значение νxy - модуля вектора составляющей вектора скорости МО в плоскости, ортогональной к направлению излучения vxy, и значение νR - модуля вектора радиальной составляющей скорости МО, а также вертикальную νy и горизонтальную νx составляющие полного вектора скорости МО.
При определении модулей векторов νxy и νR использовали линейное приближение формы частотного распределения на отражающей поверхности А. За оценку частоты  сигналов принимали центральную частоту настройки соответствующих m-ных фильтров в цифровых фильтрах суммарного канала и разностного измерительного канала, так что формировали М - размерный вектор
сигналов принимали центральную частоту настройки соответствующих m-ных фильтров в цифровых фильтрах суммарного канала и разностного измерительного канала, так что формировали М - размерный вектор  оценок частоты.
оценок частоты.
При принятом условии линейного приближения формы частотного распределения оценки угла и частоты связаны с измеряемыми параметрами радиальной составляющей νR скорости МО и тангенциальной составляющей νxy вектора скорости МО линейным уравнением

где символ  означает неизвестную (рассчитываемую) величину. При дальнейших расчетах, исходя из линейного характера частотной поверхности , облако оценок углов аппроксимировали частотной линией 28 (Фиг. 8), образованной сечением частотной поверхности плоскостью, проходящей через оси (ξ, z) (Фиг. 5). Частотную линию определяли параметрами:
означает неизвестную (рассчитываемую) величину. При дальнейших расчетах, исходя из линейного характера частотной поверхности , облако оценок углов аппроксимировали частотной линией 28 (Фиг. 8), образованной сечением частотной поверхности плоскостью, проходящей через оси (ξ, z) (Фиг. 5). Частотную линию определяли параметрами:
где  являлся сдвигом частотной линии по оси
являлся сдвигом частотной линии по оси  , а
, а  являлся коэффициентом наклона частотной линии. При подстановке значений этих параметров в выражение (1) система линейных уравнений приобретала вид:
являлся коэффициентом наклона частотной линии. При подстановке значений этих параметров в выражение (1) система линейных уравнений приобретала вид:
Аппроксимацию облака оценок углов частотной линией 28 выполняли методом регрессионного линейного анализа по критерию минимума среднеквадратичного отклонения. Значения  и
и  определяли по формулам:
определяли по формулам:
Исходя из полученных значений оценок и вычисляли значения векторов радиальной νR и тангенциальной νxy составляющих вектора скорости движения МО:
На основе значения тангенциальной составляющей  скорости и значения угла θxy поворота антенны определяли значения вертикальной νy и горизонтальной νx составляющих полного вектора скорости МО по формулам:
скорости и значения угла θxy поворота антенны определяли значения вертикальной νy и горизонтальной νx составляющих полного вектора скорости МО по формулам:

На Фиг. 9 приведены полученные методом имитационного моделирования примеры зависимости значений  ,
,  , определенные способом согласно изобретению, от точности измерения углов , для метеорологического радара согласно изобретению, накапливающего сигнал в течение интервала времени Т=1 с. При этом истинные значения скоростей, заданные в модели, составляли: νR=5 м/с, νxy=10 м/с. Ошибки измерения углов были заданы распределенными по нормальному закону с нулевым средним и среднеквадратическим отклонением σθ.
, определенные способом согласно изобретению, от точности измерения углов , для метеорологического радара согласно изобретению, накапливающего сигнал в течение интервала времени Т=1 с. При этом истинные значения скоростей, заданные в модели, составляли: νR=5 м/с, νxy=10 м/с. Ошибки измерения углов были заданы распределенными по нормальному закону с нулевым средним и среднеквадратическим отклонением σθ.
Из результатов моделирования следовало, что в диапазоне заданных значений σθ ошибка измерения радиальной составляющей νR скорости мала и составляет единицы сантиметров в секунду, она мало зависит от точности угловых измерений. Ошибка измерения тангенциальной составляющей νxy скорости возрастала при увеличении ошибки σθ измерения угла и могла достигать единиц метров в секунду, однако оставалась вполне приемлемой для метеорологических наблюдений, если ошибки измерения углов составляли σθ<1°.
Таким образом, радиолокационный способ и устройство для дистанционного измерения полного вектора скорости МО согласно изобретению позволяют с точностью, достаточной для метеорологических наблюдений и более высокой, чем в ранее известных метеорологических радарах, измерять составляющие полного вектора скорости в ограниченной области пространства, определяемой шириной суммарной диаграммы направленности антенны метеорологического радара, за относительно короткое время без сканирования диаграмм направленности антенны, с получением значений трех составляющих полного вектора скорости МО с помощью только одного устройства для его осуществления.
Промышленная применимость
Радиолокационный способ дистанционного измерения полного вектора скорости МО согласно изобретению может быть реализован с использованием устройства для его осуществления согласно изобретению, выполненного в виде метеорологического радара, с использованием известных приемлемых аппаратных вычислительных устройств и оборудования, с помощью применения моноимпульсного угломерного метода и применения регрессионного метода анализа для определения составляющих вектора скорости метеорологического объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости полёта воздушного объекта и РЛС для его осуществления | 2015 |
|
RU2608748C1 |
| АКТИВНАЯ РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2006 |
|
RU2313054C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ИОНОСФЕРНЫХ НЕОДНОРОДНОСТЕЙ | 2013 |
|
RU2529355C2 |
| РАДИОЛОКАЦИОННО-ТОМОГРАФИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРОВЫХ ПОТОКОВ | 2023 |
|
RU2805031C1 |
| Приёмо-передающее устройство гомодинного радиолокатора | 2021 |
|
RU2787976C1 |
| СПОСОБ ЧАСТОТНО-ВРЕМЕННОЙ ОБРАБОТКИ СИГНАЛОВ ОТ НЕСКОЛЬКИХ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2023 |
|
RU2824754C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДЫХАНИЯ И СЕРДЦЕБИЕНИЯ | 2008 |
|
RU2392853C1 |
| РАДИОЛОКАТОР ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРА | 2023 |
|
RU2811547C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И РАДИАЛЬНОЙ СКОРОСТИ | 2024 |
|
RU2840790C1 |
Изобретение представляет собой способ и устройство для радиолокационного измерения полного вектора скорости движения метеорологического объекта на основе измерения составляющих этого вектора скорости в ограниченной области пространства, определяемой шириной диаграмм направленности антенны, за короткое время без сканирования. Достигаемый технический результат - повышение точности измерений. Указанный результат достигается за счет того, что способ основан на пространственно-временной обработке отраженных от метеорологического объекта сигналов в активном когерентном радаре с моноимпульсной в двух плоскостях приемной антенной, при этом измеряют угловое положение областей метеорологического объекта, разделенных по признаку равной доплеровской частоты, определяют радиальную и две ортогональные к ней составляющие полного вектора скорости метеорологического объекта, при этом используется система вращения диаграмм направленности антенны вокруг оси излучения зондирующего сигнала по критерию максимизации интенсивности сигнала в одном из приемных каналов. 2 н.п. ф-лы, 9 ил.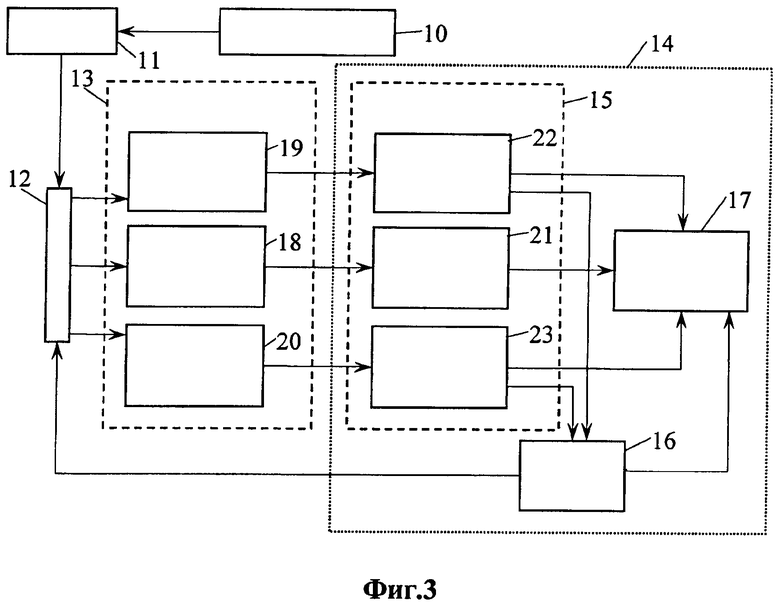
1. Радиолокационный способ дистанционного измерения полного вектора скорости метеорологического объекта, в котором:
- излучают в пространство когерентный зондирующий импульсный радиолокационный сигнал;
- принимают, усиливают и когерентно детектируют радиосигналы, отраженные от метеорологического объекта, выделяют в них канал разрешения по дальности в соответствии с временем их задержки и преобразуют сигналы в канале разрешения по дальности в цифровую форму данных;
- определяют полный вектор скорости метеорологического объекта путем обработки полученных данных,
отличающийся тем, что:
- прием отраженных радиосигналов производят одновременно в суммарной диаграмме направленности антенны и в двух разностных диаграммах направленности антенны в вертикальной и горизонтальной плоскостях в течение заданного времени накопления отраженных радиосигналов;
- направляют принятые радиосигналы раздельно в соответствующие диаграммам направленности антенны разностный вертикальный, разностный горизонтальный и суммарный приемные каналы, в которых обеспечивают их усиление, когерентное детектирование, выделение канала разрешения по дальности в соответствии с временем задержки приема радиосигналов в каждом указанном приемном канале, и осуществляют цифровое преобразование указанных принятых радиосигналов в массивы исходных данных в каждом соответствующем приемном канале для вьщеленного канала разрешения по дальности;
- осуществляют узкополосную фильтрацию указанных массивов исходных данных в М каналах фильтрации, имеющих в указанных трех приемных каналах одинаковый набор центральных частот настройки фильтров, при этом для выделенного канала разрешения по дальности в каждом приемном канале определяют спектры частот сигналов в виде М значений амплитуд спектра частот в каждом из указанных каналов фильтрации;
- сравнивают средние значения указанных амплитуд спектров частот сигналов в указанных разностных вертикальном и горизонтальном приемных каналах для одного ранее выделенного канала разрешения по дальности и производят поворот всех диаграмм направленности антенны вокруг оси излучения до достижения максимальной разности средних значений амплитуд указанных спектров в разностном вертикальном и разностном горизонтальном каналах, осуществляя при этом непрерывно указанные действия по излучению зондирующего сигнала, раздельному приему отраженных сигналов в приемных каналах в соответствии с диаграммами направленности антенны в течение указанного интервала времени накопления, по выделению в них каналов разрешения по дальности в соответствии с временем задержки их приема, по цифровому преобразованию указанных принятых радиосигналов в массивы исходных данных и по указанной фильтрации;
- определяют значение угла поворота диаграмм направленности антенны при достигнутой указанной максимальной разнице средних значений амплитуд указанных спектров в указанных разностном вертикальном и разностном горизонтальном каналах и из указанных двух разностных приемных каналов один разностный приемный канал, имеющий большее среднее значение амплитуд спектра частот, выбирают в качестве измерительного канала, в отношении которого производят следующие действия:
- в указанных суммарном и измерительном приемных каналах, для каждой из М пар фильтров, имеющих одинаковую центральную частоту настройки, для выделенного канала разрешения дальности определяют М значений угла прихода сигнала путем совместной обработки амплитуд спектров частот сигналов суммарного и измерительного каналов моноимпульсным методом;
- определяют значения модуля радиальной составляющей скорости и модуля ортогональной к ней тангенциальной составляющей скорости метеорологического объекта путем совместной обработки М полученных значений угла прихода сигнала с применением метода линейного регрессионного анализа;
- определяют полный вектор скорости метеорологического объекта путем расчета значений модулей векторов вертикальной и горизонтальной составляющих его скорости на основе тригонометрических соотношений полученных значений модуля тангенциальной составляющей скорости метеорологического объекта и указанного угла поворота антенны.
2. Устройство для дистанционного измерения полного вектора скорости метеорологического объекта, выполненное в виде метеорологического радара, содержащего:
- генератор импульсного сигнала, модулирующий сигнал передатчика;
- передатчик, обеспечивающий формирование когерентного зондирующего сигнала;
- антенну, излучающую зондирующий радиолокационный сигнал в пространство и принимающую радиосигналы, отраженные от метеорологического объекта;
- приемное устройство, обеспечивающее усиление, когерентное детектирование принятых радиосигналов, выделение в них канала разрешения по дальности в соответствии с временем их задержки и цифровое преобразование указанных отраженных радиосигналов в массивы исходных данных в каждом соответствующем приемном канале для выделенного канала разрешения по дальности;
- устройство обработки полученных данных для определения полного вектора скорости метеорологического объекта,
отличающейся тем, что:
- в качестве антенны содержит моноимпульсную угломерную антенну (12), обеспечивающую прием сигналов, отраженных от метеорологических объектов, одновременно в суммарной диаграмме направленности антенны и в двух разностных диаграммах направленности антенны в вертикальной и горизонтальной плоскостях, и снабженную устройством поворота указанных трех диаграмм направленности антенны вокруг оси (z) излучения зондирующего сигнала;
- приемное устройство (13) содержит три идентичных приемных канала (18, 19, 20), обеспечивающих раздельное усиление, когерентное детектирование сигналов, принятых, соответственно, по указанным суммарной и разностным диаграммам направленности антенны, выделение в них канала разрешения по дальности в соответствии с временем их задержки, и цифровое преобразование указанных принятых радиосигналов в массивы исходных данных в каждом соответствующем приемном канале для выделенного канала разрешения по дальности;
- устройство (14) обработки данных содержит:
- блок (15) цифровых фильтров (21, 22, 23), включающий М фильтров в каждом суммарном, разностном вертикальном и разностном горизонтальном каналах, обеспечивающих узкополосную фильтрацию каждого указанного массива исходных данных в соответствующем приемном канале с получением М значений амплитуд спектров частот радиосигналов для выделенного канала разрешения по дальности;
- блок (16) управления антенной, обеспечивающий:
- сравнение средних значений М амплитуд указанных спектров частот сигналов в фильтрах (22, 23) разностных вертикального и горизонтального каналов и подачу на устройство поворота диаграмм направленности антенны (12) управляющего сигнала, обеспечивающего поворот диаграмм направленности антенны (12) вокруг оси (z) излучения зондирующего сигнала до достижения максимальной разности средних значений амплитуд указанных спектров частот сигналов в фильтрах (22, 23) разностного вертикального и разностного горизонтального каналов;
- выбор из указанных двух разностных каналов одного разностного канала, имеющего большее значение средней амплитуды спектра частот в фильтрах (22, 23), в качестве измерительного канала;
- определение значения угла поворота диаграмм направленности антенны (12);
- вычислитель (17) обработки данных сигналов, обеспечивающий последовательно:
- определение М значений угла прихода сигнала путем совместной обработки амплитуд спектров частот сигналов суммарного и измерительного каналов моноимпульсным методом, для каждой из М пар фильтров в каналах фильтрации в указанных суммарном и измерительном приемных каналах, имеющих одинаковую центральную частоту настройки, для выделенного канала разрешения по дальности;
- определение значения модуля радиальной составляющей и модуля ортогональной к ней тангенциальной составляющей скорости метеорологического объекта путем совместной обработки М полученных значений угла прихода сигнала с применением метода линейного регрессионного анализа;
- определение полного вектора скорости метеорологического объекта путем расчета значений модулей векторов вертикальной и горизонтальной составляющих его скорости на основе тригонометрических соотношений для полученных значений модуля тангенциальной составляющей скорости метеорологического объекта и для указанного угла поворота антенны.
| US 20110304501 A1,15.12.2011 | |||
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ ВЕТРА | 2011 |
|
RU2469361C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛЯ СКОРОСТЕЙ ВОЗДУШНОЙ МАССЫ ПОСРЕДСТВОМ ВЫСОКОРАЗРЕШАЮЩЕГО ДОПЛЕРОВСКОГО АНАЛИЗА | 2006 |
|
RU2421754C2 |
| Предохранительное приспособление к станам для холодной прокатки металлов | 1928 |
|
SU23317A1 |
| US 6140954 A, 31.10.2000 | |||
| WO 2005040853 A1, 06.05.2005 | |||
| US 5442359 A, 15.08.1995. | |||

