(54) СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЗЕМЛЕРОЙНОЙ МАШИНЫ
1
Изобретение относится к области строительного, дорожного и мелиоративного машиностроения, а именно к автоматизированным машинам с регулируемым положением рабочего оборудования относительно копира, в качестве которого используется лазерный луч.
Известна лазерная система управления рабочим органом дреноукладчика, включаюш,ая лазерный излучатель, фотоприемник, усилитель, преобразователь и исполнительный гидроцилиндр 1.
Недостатком этой лазерной системы является то, что она не может быть использована для регулирования нескольких координат рабочего органа относительно одного лазерного луча, поскольку включает только один фотоприемник и,, соответственно, один усилитель, преобразователь и один исполнительный механизм.
Известно устройство для управления рабочими органами дреноукладчиков типа МД-4 и ЭТЦ-406,в котором в продол,ьной вертикальной плоскости используются два контура: контур регулирования высотного положения относительно копира и контур угловой стабилизации рабочего органа с задатчиком в виде маятникового датчика угла 2.
Однако вследствие низкой помехозашишенности применение маятниковых датчиков в системах управления землеройных
5 машин нежелательно.
Известна лазерная система управления рабочим оборудованием землеройной машины, позволяющая исключить маятниковый датчик, включающая два контура регулиро1Q вания, каждый из которых состоит из фотоприемного блока, который подключен к своему исполнительному механизму через усилитель и преобразователь. Это устройство позволяет независимо регулировать высотное положение двух точек рабочего органа землеройной мащины относительно лазерного луча и тем самым стабилизировать высотное и угловое положение его в продольной вертикальной плоскости 3.
2Q Однако регулирование высотного положения двух точек рабочего органа в ряде случаев не обеспечивает требуемого качества процесса несмотря на то, что конечные результаты процесса управления могут оказаться одинаковыми как при применении маятникового датчика угла, так и при использовании двух датчиков высоты - фотоприемников.
Качество регулирования существенно зависит от расстояния между фотоприемниками и от выбора места их расположения на машине, причем, последнее зависит как от кинематической схемы рабочего оборудования, так и от характера возмущений.
Известно, что установка первого фотоприемника, который управляет высотным положением рабочего органа, а также его режущей кромки, должна быть выполнена так, чтобы он находился на вертикали над этой кромкой. Такое положение измерительного элемента устанавливает простейшую связь между измеренным отклонением и величиной перемещения регулируемой точки, требуемой для компенсации этого отклонения: они практически равны. Этим обеспечивается высокое качество регулирования по этой первой координате - высоте. Что касается расположения второго фотоприемника; включенного во второй контур регулирования, например в контур угловой стабилизации рабочего органа, то легко понять, что чувствительность, а следовательно точность управления, тем выше, чем больше расстояние между приемниками и чем дальше этот второй приемник расположен от шарнира поворота рабочего органа относительно рамы. Однако конструкция и габариты управляемого объекта (машины) не позволяют увеличивать это расстояние до значительного. Кроме того, в зависимости от того, какой характер движения рабочего органа под действием возмущений, наивыгоднейшее размещение второго фотоприемника должно быть разным. Если отклонение рабочего органа является результатом его поворота относительно мнимого центра, расположенного впереди, второй фотоприемник наиболее выгодно расположить позади шарнира поворота рабочего органа относительно рамы. Наоборот, если отклонение является результатом поворота относительно мнимого центра, расположенного позади, или, если отклонение произошло вследствие плоско-параллельного перемещения рабочего органа, наиболее радионально разместить второй фотоприемник впереди шарнира поворота рабочего органа относительно рамы. Поскольку движения рабочего органа под действием возмущений являются случайными, и их характер предсказать невозможно, выбор одного определенного расположения второго фотоприемника относительно шарнира поворота (впереди или сзади) при определенных условиях может оказаться нерациональным с точки зрения качества регулирования, т.е. скорости и точности возвращения рабочего органа в требуемое положение. Если же к этому прибавляется труднореализуемое требование увеличения расстояния между фотоприемниками, то выбор оптимального
расположения второго фотоприемника относительно первого и относительно щарнира поворота рабочего органа с точки зрения обеспечения высокого качества регулирования приводит к необходимости реализ(жать требования. Поэтому управление положением рабочего органа землеройной машины в продольной вертикальной плоскости путем независимого регулирования положения двух точек относительно луча лазера на практике может привести к весьма низкому качеству переходных процессов. Рабочий орган приходит в требуемое положение после перемещения некратчайщим по характеру самих перемещений и по времени путем. Это снижает точность управления и, например, при укладке дренажа, приводит к появлению местных отклонений положения укладываемой линии по высоте выходящих за пределы допустимых.
Целью изобретения является повыщение качества переходных процессов в системе управления и уменьшения динамических ошибок двухконтурной системы управления относительно лазерного луча.
Поставленная цель достигается тем, что система снабжена последовательно соединенными инверторо.м и сумматором, вход инвертора подключен к выходу усилителя одного контура регулирования, а второй вход сумматора соединен с выходом усилителя второго контура регулирования, ко входу преобразователя которого подключен выход сумматора.
Такая связь между контурами существенно снижает отрицательные последствия, вызванные тем, что принятое в конструкции машины положение одного из фотоприемников скажется неоптимальным при каком-либо случайном перемещении рабочего органа под действием возмущающих воздействий. Повышается также чувствительность системы, т.е. уменьшается влияние расстояния между фотоприемниками и расстояния от шарнира поворота рабочего органа относительно рамы до второго фотоприемника на точность управления.
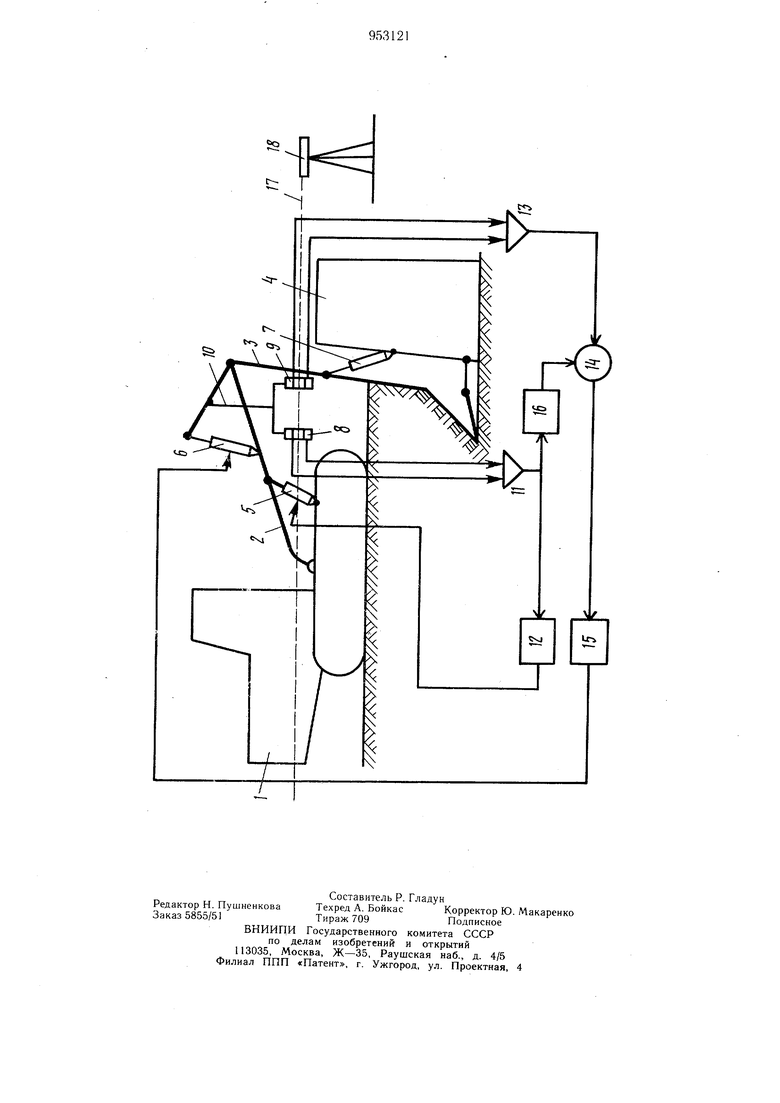
На чертеже приведена блок-схема системы, установленная на дреноукладчике.
Дреноукладчик, оборудованный системой управления, включает трактор 1, раму 2 рабочего органа, рабочий орган 3, трубоукладчик 4, гидроцилиндр 5 подъема рабочего органа, гидроцилиндр 6 изменения углового положения рабочего органа, гидроцилиндр 7 трубоукладчика, фотоприемники 8 и 9, устанавливаемые на маятниковой подвеске 10, исклк)чающей ошибки от поперечных на клонов рабочего органа. Фотоприемник 8 через дифференциальный усилитель 11 и электрогидравлический преобразователь 12 подключен к гидроцилиндру 5 подъема рабочего органа относительно тягача. На грунтах с высокой несущей способностью вместо гидроцилиндра 5 может быть использован
гидроцилиндр 7 подъема рабочего органа относительно трубоукладчика.
Фотоприемник 9 через дифференциальный усилитель 13, сумматор 14 и электрогидравлический преобразователь 15 подключен к гидроцилиндрам 6 поворота рабочего органа.
Между выходом усилителя 11 и вторым входом сумматора 14 включен инвертор 16 для изменения полярности сигнала, поступающего с усилителя 11 на сумматор 14. Фотоприемники 8 и 9 взаимодействуют с опорным лучом 17, генерируемым лазером 18.
Система работает следующим образом.
При отклонении любого из фотоприемников 8 и 9 относительно лазерного луча изменяется освещенность фотодиодов фотоприемника и соответственно разность потенциалов между ними, в результате чего на выходе дифференциального усилителя 11 или 13 появляется сигнал, полярность которого зависит от направления перемещения фотоприемника.
В зависимости от полярности сигнала преобразователь 12 или 15 обеспечивает включение исполнительного гидроцилиндра 5 или 6 в направлении устранения отклонения фотоприемника относительно лазерного луча. В качестве преобразователя может быть, например, использовано поляризованное реле в сочетании с золотником, имеющим электрогидравлическое управление. В зависимости от полярности подаваемого на такое реле напряжения оно замыкает цепь соответствующего электромагнита золотника, обеспечивая срабатывание исполнительного гидроцилиндра в нужную сторону.
Поскольку преобразователь 15 подключен не только к фотоприемнику 9, но и к фотоприемнику 8, причем так, что на выходе сумматора 14 возникает сигнал только в том случае, когда имеет место относительное перемещение фотоприемников 8 и 9, то включение гидроцилиндров 5 происходит только при изменении углового положения рабочего органа, которое в данном случае будет регулируемым параметром.
Такая связь между двумя контурами регулирования позволяет управлять положением рабочего органа при достаточно высоком качестве переходных процессов независимо от того, где расположен второй фотоприемник - впереди или позади первого, а также впереди или позади шарнира поворота рабочего органа относительно рамы. Снижается также влияние величины базы (расстояния между фотоприемниками) на точность управления.
Исключение из системы маятникового датчика угла позволит повысить скорость
дреноукладчика и скорости отработки исполнительных гидроцилиндров без ущерба для устойчивости системы. Улучшение динамики системы позволит, кроме того, снизить динамические ошибки и за счет этого повысить точность выполнения операций землеройными машинами.
Формула изобретения
Система управления рабочим оборудованием землеройной машины относительно лазерного луча, включающая два контура регулирования, каждый из которых состоит из фотоприемного блока, усилителя, преобразователя и исполнительного механизма, отличающаяся тем, что, с целью повышения качества переходных процессов в системе и уменьшения динамических ощибок, она снабжена последовательно соединенными инвертором и сумматором, вход инвертора подключен к выходу усилителя одного контура регулирования, а второй вход сумматора соединен с выходом усилителя второго контура регулирования, к входу преобразователя которого подключен выход сумматора. Источники информации,
принятые во внимание при экспертизе
1.Ефремов и др. Применение лазера при строительстве закрытого дренажа. - «Гидротехника и мелиорация. 1977, № 2, с. 69- 76.
2.Кузин Э. Н. и др. Дреноукладчик МД-4 и тягач МД-5. - «Строительные и дорожные мащины, 1977, № 10, с. 7.
3.Патент ФРГ № 2009360, кл. 42 d 1/15, опублик. 1975.
50


| название | год | авторы | номер документа |
|---|---|---|---|
| Полуприцепной дреноукладчик и система регулирования пространственного положения его рабочего органа | 1990 |
|
SU1789614A1 |
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |
| Автоматический регулятор землеройной машины | 1982 |
|
SU1120073A1 |
| Устройство управления рабочим органом дреноукладчика | 1983 |
|
SU1151647A1 |
| Датчик пути | 1990 |
|
SU1788164A1 |
| Устройство для управления положением рабочего органа землеройных машин | 1976 |
|
SU726277A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| Устройство автоматического управления бестраншейного дреноукладчика | 1982 |
|
SU1063949A2 |