Изобретение относится к оборудованию для производства погрузочных работ в подземных условиях, а именно к погрузочным машинам с боковой разгрузкой.
Известна погрузочная машина, погрузочный орган которой состоит из рукояти, ковша с механизмом, обеспечивающим боковую разгрузку и гидроцилиндров зачерпывания и подъема (см. Проспект машины L513 фирмы Delmann - Hamel YmbH, ФРГ, выставка "Уголь-90" г. Донецк). Рукоять выполнена в виде рычага, закрепленного одним концом на раме машины. На другом конце рычага с помощью оси поворота и гидроцилиндра зачерпывания закреплен ковш. Подъем рукояти с ковшом осуществляется другим гидроцилиндром, установленным вертикально между рамой машины и рычагом рукояти.
Такая кинематическая схема погрузочного органа имеет следующий недостаток. Механизмы зачерпывания ковша и подъема рукояти представляют собой два независимых силовых треугольника, одно из звеньев которого (гидроцилиндр) имеет переменную длину. При зачерпывании и подъеме ковш совершает вращательное движение относительно соответствующей оси. Поэтому для предотвращения высыпания груза во время подъема ковша необходимо одновременно включать гидроцилиндр зачерпывания таким образом, чтобы ковш совершал плоскопараллельное движение в вертикальной плоскости. Это усложняет гидравлическую схему машины и затрудняет работу оператора, т.к. положение ковша в пространстве определяется визуально и зависит от соотношения перемещений двух независимых гидроцилиндров, управляемых вручную.
Известны также погрузочные машины с боковой разгрузкой ковша, подъемный механизм которого выполнен в виде четырехзвенника, включающего зет-образную рукоять, гидроцилиндры черпания и подъема (см. а.с. СССР N 1694883, E 21 C 11/02, 1991, а также "Машины и оборудование для очистных и проходческих работ. Отраслевой каталог. Часть II. Оборудование для проходческих работ". М., 1991, с. 60 - 65).
Рукоять и гидроцилиндр черпания закреплены одним концом на раме машины, а другим концом на опоре ковша. На рукояти имеется дополнительная ось закрепления штока подъемного гидроцилиндра, установленного вкрест гидроцилиндру зачерпывания, вертикально между рамой машины и рукоятью. Ось поворота ковша относительно рукояти максимально опущена в горизонтальной плоскости и находится практически на уровне рабочей кромки ковша, а гидроцилиндр зачерпывания, работающий штоковой полостью, закреплен в верхней части опоры ковша.
Кинематический анализ показывает, что при зачерпывании породы рабочая кромка ковша, поднимаясь вверх, не только не внедряется, но практически сразу начинает выходить из погружаемой массы, что делает процесс загрузки ковша неэффективным и требует постоянной подачи машины на штабель породы с помощью ходовых гусениц. Кроме усложнения гидросхемы машины и затруднения работы оператора это может привести к пробуксовке гусениц, что особенно опасно на слабых обводненных почвах. Вертикальное расположение подъемного гидроцилиндра уменьшает клиренс машины ввиду низкого расположения точки крепления гидроцилиндра к раме машины.
В основу изобретения поставлена задача создания погрузочной машины, в которой за счет обеспечения одновременного внедрения рабочей кромки ковша в штабель породы и ее подъема при зачерпывании путем изменения кинематической схемы погрузочного органа повышается производительность, уменьшаются габариты и масса, упрощается работа оператора.
Поставленная задача решается следующим образом.
В известной погрузочной машине, включающей ходовую тележку с электро- и гидрооборудованием и погрузочный орган, состоящий из ковша с опорой и гидроцилиндром боковой разгрузки, рукояти и гидроцилиндров подъема и черпания, образующих четырехзвенный механизм подъема ковша, рукоять выполнена в виде Г-образного рычага, в прямом углу которого размещена ось поворота ковша, длинный конец рукояти осью, а короткий гидроцилиндром подъема соединены с рамой ходовой тележки, при этом гидроцилиндры подъема и черпания установлены симметрично относительно продольной оси машины, шарнирные пальцы, соединяющие гидроцилиндры с рамой ходовой тележки, находятся на одной оси.
Размещение оси поворота ковша в прямом углу Г-образного рычага и верхней точке опоры ковша повышает эффективность погрузки, т.к. траектория движения ковша при зачерпывании породы обеспечивает одновременное внедрение рабочей кромки в штабель породы и ее подъем.
Установка гидроцилиндров подъема и черпания симметрично относительно продольной оси машины в горизонтальной плоскости с закреплением шарнирных пальцев, соединяющих гидроцилиндры с рамой ходовой тележки на одной оси, позволяет унифицировать гидроцилиндры подъема и черпания, поднять точки крепления гидроцилиндров к раме и увеличить клиренс. Предлагаемые конструктивные решения в комплексе обеспечивают уменьшение габаритов и массы машины, а кинематика погрузочного органа упрощает работу оператора, т.к. не требует дополнительных включений гусеничного хода при зачерпывании породы и совместной работы гидроцилиндров подъема и черпания при подъеме ковша.
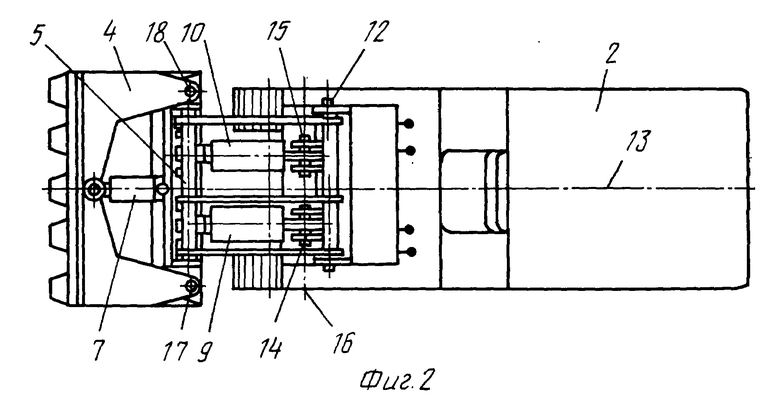
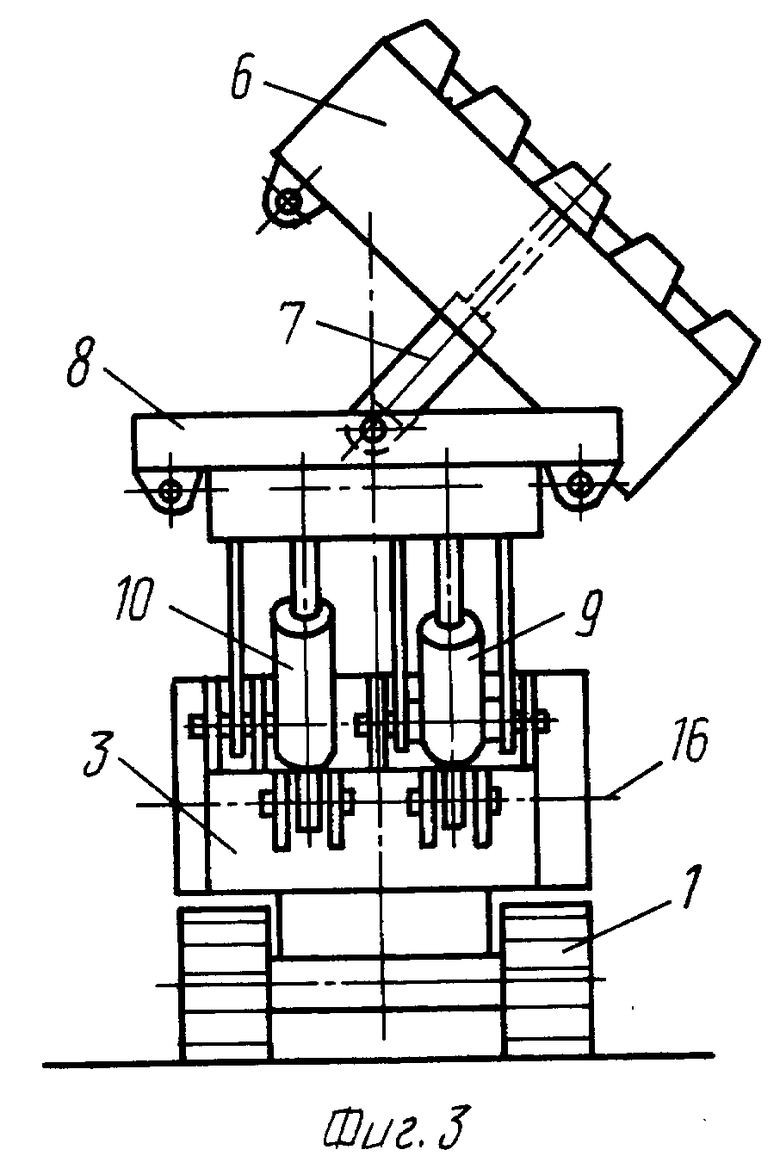
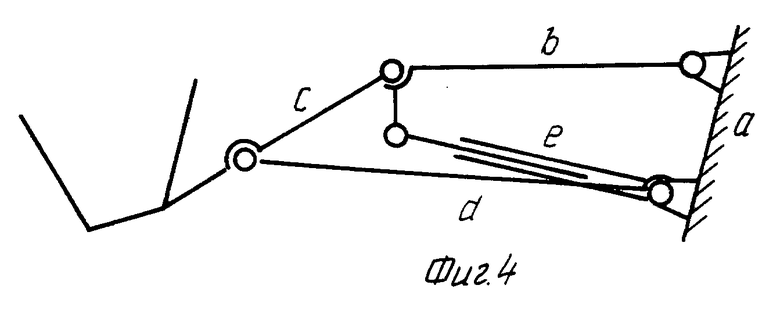
На фиг. 1 изображена погрузочная машина, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - вид сбоку в положении разгрузки, на фиг. 4 - кинематическая схема подъемного механизма.
Погрузочная машина состоит из ходовой тележки 1 с электро- и гидрооборудованием 2, рамой 3 и погрузочного органа 4, который включает рукоять 5, ковш 6 с гидроцилиндром боковой разгрузки 7, опору ковша 8, гидроцилиндры подъема 9 и черпания 10. Рукоять 5, опора ковша 8, рама 3 и гидроцилиндр черпания 10 образуют четырехзвенный механизм подъема ковша, кинематическая схема которого приведена на фиг. 4. Звено "a" соответствует раме 3, звено "b" - рукояти 5, звено "c" - опоре ковша 8 и звено "d" - гидроцилиндру 10 в раздвинутом состоянии. Приводное звено "b" механизма - гидроцилиндр 9.
Подъемный механизм представляет собой двухкривошипный четырехзвенный механизм, у которого звено "a" - неподвижно, звенья "b" и "d" - кривошипы, звено "c" - шатун. Для предотвращения высыпания породы из ковша при его подъеме необходимо, чтобы движение шатуна было плоско-параллельным или приближалось к нему. Математический анализ показал, что этого можно добиться, выдержав отношение длин звеньев /c и b/ в диапазоне от 1,0 до 1,3.
Рукоять 5 выполнена в виде пространственного Г-образного рычага, в прямом углу которого находится ось поворота 11 опоры ковша 8. Длинный конец рукояти 5 осью 12 соединен с рамой 3. Короткий конец Г-образного рычага соединен с рамой 3 гидроцилиндром подъема 9. Опора ковша 8 связана с рамой 3 гидроцилиндром черпания 10. Гидроцилиндры 9 и 10 установлены симметрично относительно продольной оси машины 13. Шарнирные пальцы 14 и 15, соединяющие гидроцилиндры с рамой 3, находятся на одной оси 16. В зависимости от направления разгрузки ковш 6 соединяется с опорой 8 осью, установленной в отверстие 17 или 18.
Погрузочная машина работает следующим образом.
За счет движения ходовой тележки 1 машина опущенным на почву выработки ковшом 6 внедряется в породу. После остановки тележки 1 включают гидроцилиндр 10 и заполняют ковш 6 породой, при этом ковш 6 вместе с опорой 8 поворачивается вокруг оси 11 в положение 19. Подъем ковша 6 производится включением гидроцилиндра 9, который, воздействуя на рукоять 5, приводит в действие четырехзвенный механизм подъема и переводит ковш 6 в положение 20.
Загруженная в ковш 6 порода включением ходовой тележки 1 отвозится к месту разгрузки. При этом ковш 6 может находиться в положении 19 при разгрузке на конвейер или 20 - при разгрузке в вагонетки. Разгрузка породы производится включением гидроцилиндра 7, при котором ковш 6 поворачивается относительно опоры 8 вокруг оси, установленной в одно из отверстий 17 или 18.
Выполнив указанные выше операции в обратном порядке, машина приводится в исходное положение и цикл погрузки повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОРНОПРОХОДЧЕСКИЙ КОМБАЙН | 1994 |
|
RU2069747C1 |
| Проходческий комбайн | 1980 |
|
SU981614A1 |
| Устройство для установки штанг в буровой станок | 1982 |
|
SU1102884A1 |
| Опорное устройство бурового станка | 1979 |
|
SU870700A1 |
| МАШИНА ДЛЯ ПОДДИРКИ ГОРНЫХ ВЫРАБОТОК | 2000 |
|
RU2176735C2 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН ПРОХОДЧЕСКОГО КОМБАЙНА | 1995 |
|
RU2122635C1 |
| Рабочий орган нагрузочно-транспортной машины | 1990 |
|
SU1795006A1 |
| Устройство для соединения проходческого комбайна с конвейером | 1987 |
|
SU1476141A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ СОПРЯЖЕНИЯ | 1996 |
|
RU2141032C1 |
| ПОГРУЗОЧНЫЙ ОРГАН ПРЕИМУЩЕСТВЕННО | 1967 |
|
SU194721A1 |
Погрузочная машина содержит ходовую тележку с электро-и гидрооборудованием, погрузочный орган, состоящий из ковша с опорой и гидроцилиндром боковой разгрузки, рукоятки и гидроцилиндров подъема и черпания, образующих четырехзвенный механизм подъема ковша. Рукоять погрузочного органа выполнена в виде пространственного Г-образного рычага, в прямом углу которого размещена ось поворота опоры ковша. Длинный конец рукояти осью, а короткий гидроцилиндром подъема соединены с рамой ходовой тележки. Гидроцилиндры подъема и черпания установлены симметрично относительно продольной оси машины. Шарнирные пальцы, соединяющие эти гидроцилиндры с рамой ходовой тележки, находятся на одной оси. Отношения длин противоположных звеньев четырехзвенного механизма равны 1,0 - 1,3. Это позволяет обеспечить одновременное внедрение рабочей кромки ковша в штабель породы и ее подъем при зачерпывании, повысить производительность, уменьшить габариты и массу. 1 з.п.ф-лы, 4 ил.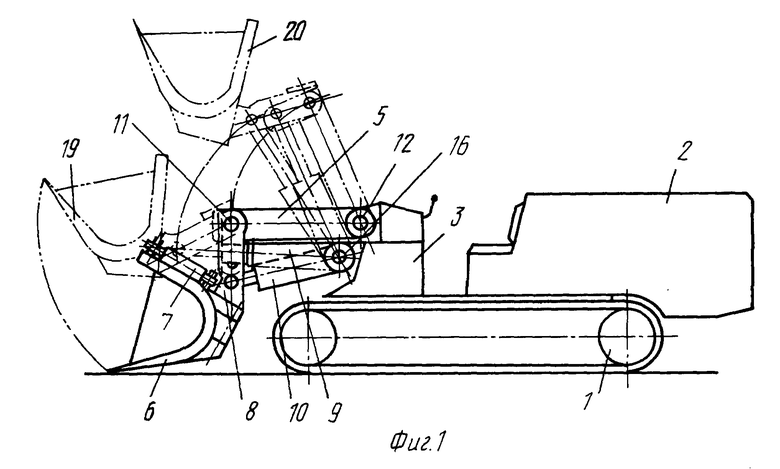
| Отраслевой каталог "Машины и оборудование для очистных и проходческих работ" | |||
| Ч.II | |||
| Оборудование для проходческих работ | |||
| - М., 1991, с.60-65. |
