Изобретение относится к области компьютерной техники, робототехники и может быть использовано в тренажерах, в интерактивных компьютерных играх для дистанционного ввода трехмерной информации в компьютер, а также для управления роботом, манипулятором или иным управляемым объектом.
Известен способ ввода информации в компьютер [1], при котором на голове и плечах оператора закрепляют оптические маркеры выполненные в виде активных или пассивных источников света. С помощью установленных у потолка и образующих многоугольник фотоэлектрических ячеек, непрерывно измеряют интенсивность света, исходящего от оптических маркеров. По изменению интенсивности света определяют текущие значения координат оптических маркеров, а следовательно и оператора в плане. Вводят текущие значения координат оператора в плане в качестве информации в компьютер.
Недостатком известного технического решения является невозможность ввода в компьютер информации о пространственных координатах отдельных частей управляющего объекта (оператора).
Наиболее близким по технической сущности, достигаемому эффекту и выбранным за прототип является способ ввода информации в компьютер [2], при котором осуществляют оптическое сканирование области расположения не перемещающегося в пространстве испытателя передающими камерами с взаимоперпендикулярными строительными осями, получают действительные оптические изображения сканируемой области, изменяют пространственные координаты отдельных частей тела испытателя с закрепленными на нем двумя источниками света, по проекциям источников света на действительных оптических изображениях определяют значения пространственных координат частей тела испытателя, вводят значения пространственных координат частей тела испытателя в качестве информации в компьютер. При осуществлении способами один источник света выполнен стационарным, а другой подвижным, при этом, используя разность координат между стационарным и подвижным источниками света, определяют функциональные возможности тела человека.
Прототип позволяет ввести в компьютер информацию о пространственных координатах отдельных частей тела испытателя, но не одновременно, а поочередно.
Недостатком прототипа является невозможность единовременного ввода в компьютер информации о пространственных координатах всех частей тела испытателя, которое в данном случае выполняет роль управляющего объекта.
Целью изобретения является осуществление возможности единовременного ввода в компьютер информации о пространственных координатах, выполненного в виде объемного тела управляющего объекта как в целом, так и отдельных его частей.
При реализации способа ввода информации в компьютер осуществляют сканирование пространства вероятного расположения управляющего передающими камерами, строительные оси которых параллельны осям ортогональной системы координат, причем строительные оси по крайней мере двух передающих камер перпендикулярны друг другу, получают действительные оптические изображения сканируемого пространства, изменяют пространственные координаты управляющего объекта, по проекциям управляющего объекта на действительных оптических изображениях определяют значения его пространственных координат, вводят значения пространственных координат управляющего объекта в качестве информации в компьютер.
В отличие от прототипа в процессе осуществления способа выделяют области управляющего объекта, соответствующие опорным точкам его графического изображения, присваивают каждой из выделенных областей управляющего объекта отдельный выбранный для нее цвет, не совпадающий с цветами, выбранными для других выделенных областей управляющего объекта, и цветами фона, вводят информацию "выделенная область управляющего объекта - выбранный для нее цвет" в компьютер, обозначают выделение области управляющего объекта метками выбранных для них цветов, при сканировании пространства вероятного расположения управляющего объекта передающими камерами используют цветные передающие камеры, действительные оптические изображения сканируемого пространства получают с проекциями на них цветных меток, определяют плоские координаты на приемниках цветных передающих камер для каждой из цветных меток и вводят их в компьютер, формируют по плоским координатам цветных меток от нескольких цветных передающих камер пространственные координаты каждой их цветных меток, определяют по информации "выбранная область управляющего объекта - выбранный для нее цвет" и по пространственным координатам каждой из цветных меток пространственные координаты выделенных областей управляющего объекта.
Термин "управляющий объект" обозначает объекты, пространственное перемещение которых управляет перемещением объектов ими управляемых, например, изображением этих объектов на экране дисплея или на проекционном экране.
В качестве управляющего объекта могут быть использованы как тела, отдельные части которых жестко зафиксированы друг относительно друга, так и тела, отдельные части которых имеют друг относительно друга некоторую степень свободы, например имеющие шарнирные соединения. В качестве первых может быть использована рапира фехтовальщика, а в качестве вторых - тело самого спортсмена.
Опорными точками графического изображения рапиры, т.е. такими точками, по которым, зная ее размеры, можно всегда определить ее пространственное расположение, могут быть любые две расположенные на клинике и достаточно удаленные друг от друга точки, или две точки, одна из которых расположена на острие, а другая на рукоятке.
В качестве выделенных областей для определения пространственного расположения как фехтовальщика в целом, так и отдельных частей его тела могут быть использованы верхняя часть головы, кисти рук и ступни ног, области локтевых, плечевых, коленных и тазобедренных суставов. Подобный выбор выделенных областей дает возможность, зная пространственные координаты этих областей, определить расположение тела фехтовальщика в пространстве при любых его перемещениях.
Цветные метки могут быть выполнены из материалов, обладающих диффузным отражением. Это позволит исключить влияние помех, характерных для зеркального отражения.
На фиг. 1 изображена блок-схема устройства, реализующего способ ввода информации в компьютер.
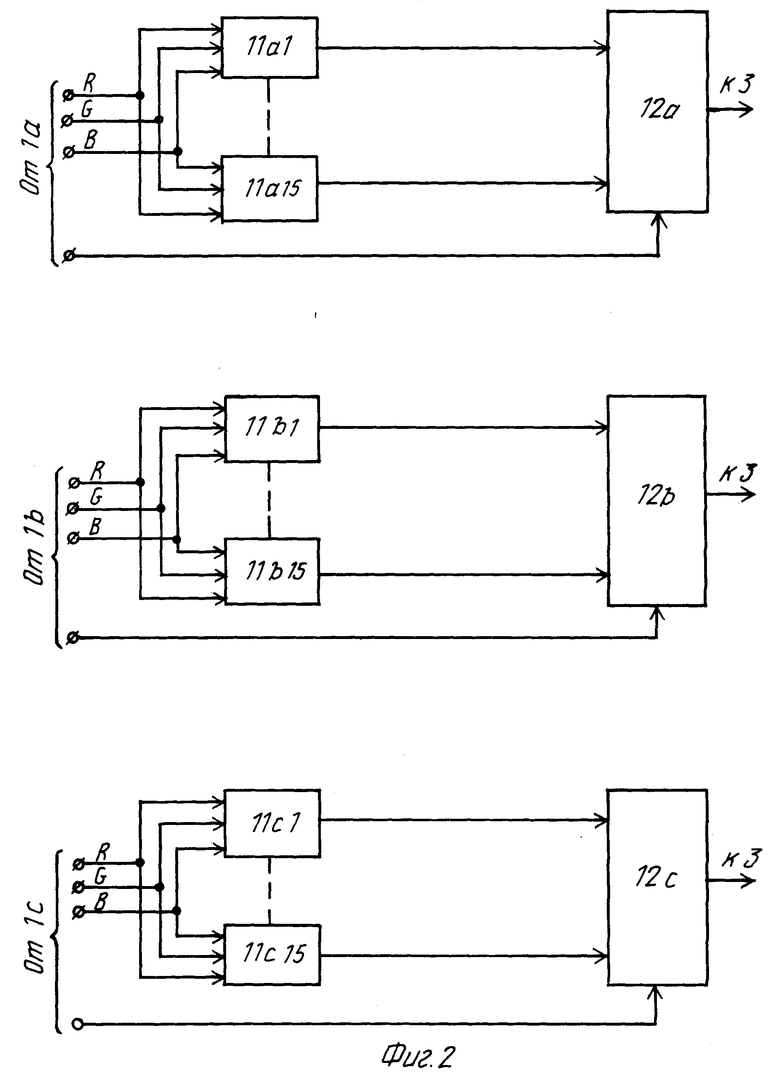
На фиг.2 изображены схемы обработки цветных сигналов.
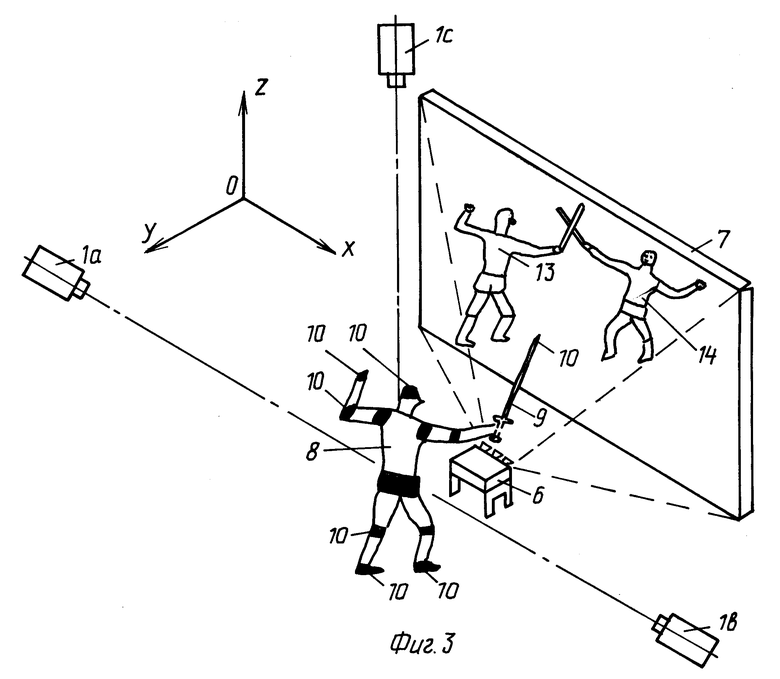
На фиг.3 иллюстрируется реализация способа вводы информации в компьютер.
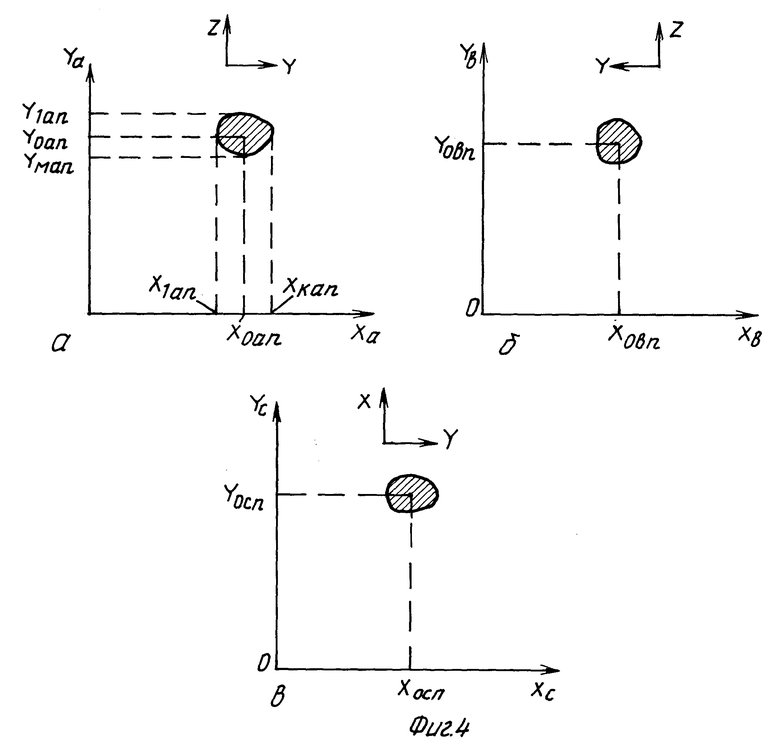
На фиг. 4 иллюстрируется определение плоских координат центров цветных меток несколькими цветными передающими камерами.
Способ ввода информации в компьютер может быть реализован с помощью устройства, блок схема которого изображена на фиг. 1.
Устройство содержит цветные передающие камеры 1a, 1b, 1c, которые располагают таким образом (фиг.3), что строительные оси камеры 1a и 1b параллельны оси OX ортогональной системы координат, а строительная ось камеры 1c параллельна оси OZ. Кроме того, устройство содержит схемы обработки цветных сигналов 2a, 2b, 2c, вычислитель пространственных координат 3, интерфейс связи 4, компьютер 5 и видеопроектор 6 с проекционным экраном 7.
Выходы цветных передающих камер 1a, 1b, 1c электрически соединены с входами соответственно схем обработки цветных сигналов 2a, 2b, 2c, выходы схем обработки цветных сигналов 2a, 2b, 2c электрически соединены соответственно с первым, вторым и третьим входами вычислителя пространственных координат 3, четвертый вход-выход вычислителя пространственных координат 3 электрически соединен с первым входом-выходом интерфейса 4. Второй вход-выход интерфейса 4 электрически соединен с первым входом-выходом компьютера 5, второй выход которого электрически соединен с входом видеопроектора 6.
В качестве управляющего объекта используют тело спортсмена 8 и рапиру 9, на которых закреплены, выполненные из материала, обладающего диффузным отражением, цветные метки 10.
Каждая их схем обработки цветных сигналов 2a, 2b, 2c содержит параллельно включенные друг относительно друга компараторы 111-1115, число которых равно числу цветных меток 10 (в нашем случае 15). Выходы компараторов 111-1115 электрически соединены с входами схемы фиксации момента обнаружения 12 цветных меток 10. Выход схемы фиксации момента обнаружения 12 цветных меток 10 является выходом схемы обработки цветных сигналов 2. В процессе осуществления способа с помощью видеопроектора 6 на проекционном экране 7 получают видеоизображение с управляемой виртуальной фигурой 13 спортсмена 8 и виртуальной фигурой противника 14. Видеопроектор 6 установлен перед проекционным экраном 7, не затрудняя визуального контакта спортсмена 8 с проекционным экраном 7.
Способ ввода информации в компьютер 5 осуществляется следующим образом.
В качестве выделенных областей управляющего объекта, соответствующих опорным точкам их графических изображений, принимают верхнюю часть головы, кисти рук и ступни ног, области локтевых, плечевых, коленных и тазобедренных суставов спортсменов 8. Вышеуказанные области тела спортсмена 8 выбраны потому, что по пространственным координатам этих областей всегда можно определить не только пространственное положение спортсмена 8 в целом, но и пространственное положение отдельных частей тела спортсмена 8 друг относительно друга. Цветные метки 10 закреплены на острие и рукоятке рапиры 8, а также на верхней части головы, кистях рук и ступнях ног, на областях локтевых, плечевых, коленных и тазобедренных суставов (15 цветных меток).
Каждой из выделенных областей тела спортсмена 8 присваивают отдельный выбранный только для нее цвет, не совпадающий с цветами выбранными для других выделенных областей тела спортсмена 8 и цветами фона.
Например, принимают что верхняя часть головы будет обозначена красным цветом, левое плечо - оранжевым цветом, правое плечо - желтым цветом, левый локоть - зеленым цветом, правый локоть - голубым цветом и т.д.
Затем вводят информацию "голова - красный цвет, левое плечо - оранжевый цвет, правое плечо - желтый цвет, левый локоть - зеленый цвет, правый локоть - голубой цвет и т.д." в компьютер 5.
Обозначают выделенные области тела спортсмена 8 цветными метками 10, выбранных для них цветов, для чего используют элементы одежды и нашивки (наклейки) на костюме спортсмена 8. Для обозначения верхней части головы спортсмена 8 используют шапочку, для обозначения кистей рук - перчатки, ступней ног - спортивные тапочки, локтевых, плечевых и тазобедренных суставов - нашивки или наклейки соответствующих цветов в соответствующих зонах костюма спортсмена 8. Цвет фона, т.е. цвет стен помещения и находящихся в помещении предметов, цвет костюма спортсмена 8 выбирается не совпадающим с цветами цветных меток 10.
При осуществлении способа пространство вероятного расположения спортсмена 8 сканируют цветными передающими камерами 1a, 1b, 1c. В процессе ввода информации спортсмен 8 свободно перемещается в зоне действия цветных передающих камер 1a, 1b, 1c.
В процессе сканирования пространства вероятного расположения спортсмена 8 на приемниках цветных передающих камер 1a, 1b, 1c получают плоские проекции сканируемого пространства с проекциями на них цветных меток 10 в виде крупных цветовых пятен.
Видеосигнал с цветной передающей камеры 1a передается на вход схемы обработки цветного сигнала 2a, т.е. на входы компараторов 11a1-11a15, видеосигнал с цветной передающей камеры 1b передается на вход схемы обработки цветного сигнала 2b, т.е. на входы компараторов 11b1-11b15, а видеосигнал с цветной передающей камеры 1 c передается на вход схемы обработки цветного сигнала 2c, т.е. входы компараторов 11c1-11c15.
Каждый из компараторов 11an. 11bn. в цепях цветных передающих камер 1a, 1b, 1c настроен на срабатывание при одном определенном соотношении R, G и B цветов, т. е. на пропускание сигналов цветности элементов разложения отображающих n-ую цветную метку 10. Отношение R : G : B для срабатывающих компараторов 11an. 11bn. 11cn. должно укладываться в пределы (r
При несовпадении сигналов цветности элементов разложения с настройкой одного из компараторов 11a1-11a15, 11b1-11b15, 11c1-11c15 (случай, когда элементы разложения кадра отображают фон, цвет которого не совпадает с цветом ни одной из цветных меток 10) на входах схем фиксации момента обнаружения 12a, 12b и 12c цветных меток 10 нет сигналов.
При совпадении сигналов цветности элементов разложения с настройкой n-х компараторов 11an. 11bn. 11cn. (случай, когда элементы разложения отображают n-ю цветную метку 10) сигналы проходят на входы схем фиксации момента обнаружения 12a, 12b и 12c цветных меток 10.
Схемы фиксации момента обнаружения 12a, 12b и 12c цветных меток 10 фиксируют номер (n) компараторов 11an. 11bn. 11cn., с которых пришел сигнал и время t прихода сигнала относительно строчного и кадрового синхроимпульсов и по времени t и номеру n вырабатывают сигналы, несущие информацию о плоских координатах, на приемниках цветных передающих камер 1a, 1b, 1c, например, i-го элемента разложения кадра (Xain, Yain, Xbin, Ybin, Xcin, Ycin), отображающего элемент проекции конкретной n-ой цветной метки 10. Сигналы со схем фиксации момента обнаружения 12a, 12b и 12c передаются на первый, второй и третий входы вычислителя пространственных координат 3.
Вычислитель пространственных координат 3 по координатам первого (Xlan, Ylan) и последнего (XKan, YMan) элементов разложения кадра, относящихся к проекциями n-ой из цветных меток 10 (фиг.4а) на приемнике передающей камеры 1a определяет плоские координаты центра (XOan, YOan) для каждой из цветных меток 10 по следующему алгоритму
XOan = (Xlan + XKan)/2, (1)
YOan = (Ylan + YMan)/2, (2)
Аналогичным образом определяются плоские координаты центров для каждой из цветных меток 10 (XObn, YObn, XOcn, YOcn) на приемниках передающих камер 1b и 1c (фиг.4б и фиг.4в).
По плоским координатам центров цветных меток 10 от нескольких цветных передающих камер 1a, 1b, 1c (XOan, YOan, XObn, YObn, XOcn, YOcn) вычислитель пространственных координат 3 формирует пространственные координаты центра каждой из цветных меток 10 (XOn, YOn, ZOn).
Для случая изображенного на фиг.3 и 4, когда строительные оси передающих камер 1a и 1b параллельны оси OX, а строительная ось передающей камеры 1c параллельна оси OZ: XOn = YOcn, YOn = XOan = -XObn, ZOn = YOan = YObn.
Сформированные пространственные координаты центра каждой из цветных меток 10 (XOn, YOn, ZOn) с вычислителя пространственных координат 3 через интерфейс 4 передаются в компьютер 5.
Сопоставляя ранее введенную информацию "выбранная область управляющего объекта - выбранный для нее цвет" и полученные пространственные координаты центра каждой из цветных меток 9, компьютер 5 формирует пространственные координаты каждой из выделенных частей тела спортсмена 8.
По полученным пространственным координатам центра каждой из выделенных частей тела спортсмена 8 на проекционном экране 7 программируемым образом формируется изображение управляемой виртуальной фигуры 13 спортсмена 8, перемещающейся синхронно с перемещением спортсмена 8. Программируемым образом сформированная управляемая виртуальная фигура 13 спортсмена 8 может взаимодействовать со средой, сформированной также программно на проекционном экране 7, например, с виртуальной фигурой противника 14.
Таким образом, из вышесказанного следует, что данное изобретение позволит ввести в компьютер информацию о пространственных координатах частей управляющего объекта отдельно друг от друга, что значительно расширяет возможности оператора, например, в интерактивных компьютерных играх.
Применение изобретения.
Следует иметь в виду, что вариант реализации изобретения, описанный выше и представленный на чертежах, не является единственным. Могут быть использованы и другие вариации выполнения изобретения в отношении исполнения способа ввода информации в компьютер.
Источники информации
1. Патент США N 5086404, МКИ G 06 G 7/48, НКИ 364/559, публ. 04.02.1992.
2. Патент США N 4375674, МКИ A 61 B 5/05, НКИ 364/559, публ. 01.03.1983.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ | 1996 |
|
RU2099775C1 |
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ | 1996 |
|
RU2099774C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ | 1995 |
|
RU2101753C1 |
| Спортивный хронометраж на основе системы камер | 2020 |
|
RU2813497C1 |
| СПОСОБ ОТОБРАЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2006 |
|
RU2340915C2 |
| УСТРОЙСТВО ДЛЯ ХРОНОГРАФИЧЕСКОЙ РЕГИСТРАЦИИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2485566C1 |
| УСТРОЙСТВО СОДЕЙСТВИЯ ОТСЛЕЖИВАНИЮ, СИСТЕМА СОДЕЙСТВИЯ ОТСЛЕЖИВАНИЮ И СПОСОБ СОДЕЙСТВИЯ ОТСЛЕЖИВАНИЮ | 2014 |
|
RU2566680C1 |
| УСТРОЙСТВО СОДЕЙСТВИЯ ОТСЛЕЖИВАНИЮ, СИСТЕМА СОДЕЙСТВИЯ ОТСЛЕЖИВАНИЮ И СПОСОБ СОДЕЙСТВИЯ ОТСЛЕЖИВАНИЮ | 2014 |
|
RU2565243C1 |
| СПОСОБ КОНТРОЛЯ И АНАЛИЗА ДВИЖЕНИЙ СПОРТСМЕНА | 2007 |
|
RU2361637C2 |
| ПЕРЕДАЮЩЕЕ УСТРОЙСТВО, СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ, ПРОГРАММА И ПЕРЕДАЮЩАЯ СИСТЕМА | 2012 |
|
RU2575870C2 |
Изобретение относится к области компьютерной техники, робототехники и может быть использовано в тренажерах, в интерактивных компьютерных играх для дистанционного ввода трехмерной информации в компьютер, а также для управления роботом, манипулятором или иным управляемым объектом. Изобретение решает задачу осуществления возможности единовременного ввода в компьютер информации о пространственных координатах, выполненного в виде объемного тела управляющего объекта как в целом, так и отдельных его частей, при реализации способа ввода информации в компьютер осуществляют сканирование пространства вероятного расположения управляющего объекта цветными передающими камерами, получают действительные оптические изображения сканируемого пространства, изменяют пространственные координаты управляющего объекта, определяют значения его пространственных координат, вводят значения пространственных координат управляющего объекта в качестве информации в компьютер. В процессе осуществления способа выделяют области управляющего объекта, соответствующие опорным точкам его графического изображения, присваивают каждой из выделенных областей управляющего объекта отдельный выбранный для нее цвет, не совпадающий с цветами, выбранными для других выделенных областей управляющего объекта, и цветами фона, вводят информацию в компьютер, обозначают выделенные области управляющего объекта метками с выбранными для данных областей цветами. 2 з.п.ф-лы, 4 ил.
| US, патент, 4375674, A 61 B 5/05, 1983 | |||
| US, патент, 5086404, G 06 G 7/48, 1992 | |||
| EP, патент, 0526015, G 06 K 11/18, 1993 | |||
| RU, заявка, 94001424, G 06 F 3/033, 27.02.96 | |||
| RU, патент, 2022335, G 06 K 11/18, 1994 | |||
| RU, патент, 2004930, G 06 K 11/18, 1993. |
