Изобретение относится к автоматике и компьютерной технике и может использоваться в телевидении и робототехнике для дистанционного ввода информации в компьютер или иной управляемый объект.
Известен способ ввода информации в объект управления (компьютер), в котором управляют изображением или его фрагментом посредством, например, специального приспособления типа "мышь" [1]
В традиционном варианте мышь перемещается по горизонтальной поверхности, например, стола и ее положение определяет положение курсора на экране компьютера. Таким образом, вводимая информация оказывается принципиально двумерной. Это ограничивает применение мыши при управлении параметрами компьютерного объемного, стереоскопического или квазиобъемного (т.е. обычного плоского, но учитывающего перспективу) изображения, а также при управлении через компьютер трехмерными роботами, манипуляторами и иными управляемыми объектами.
Кроме того, наличие кабеля затрудняет управление и ограничивает возможности оператора. Поэтому предпринимаются усилия по созданию способов для ввода информации в объект управления, например компьютер, использующих устройства, не связанные с объектом управления кабелем, проводами и т.д. Эти устройства могут применяться и для эффективного дистанционного беспроводного ввода двумерной или любой иной информации в телевизоры или иные электронные приборы бытового или промышленного назначения, использующие, например, принципы "меню", "окна" и др.
Известен бесконтактный дистанционный способ ввода информации в объект управления, включающий задание характера и степени управляющих воздействий путем кодирования сигнала пакетами импульсов с заданными параметрами, который используется, например, в радиоуправляемых моделях [2]
Однако данный способ вследствие радиопомех сложно реализовать в производственных условиях. Более того, этот метод сам может создавать радиопомехи, препятствующие работе различных устройств, например компьютеров. Кроме того, он не позволяет вводить информацию, зависящую от пространственных координат руки оператора, что необходимо при выполнении различных производственных операций и ограничивает возможности применения метода.
Наиболее близким по технической сущности и достигаемому эффекту является принимаемый нами за прототип способ ввода информации в управляемый объект, включающий ввод в объект управления текущих значений пространственных координат связанного с телом оператора источника излучения [3] При использовании акустического излучения в качестве носителя информации положение источника излучения в пространстве, являющегося управляющим воздействием, определяется путем сравнения абсолютных значений сигналов, принимаемых по крайней мере тремя приемниками излучения. При использовании электромагнитного (в том числе оптического) излучения в качестве носителя информации положение источника излучения в пространстве определяется путем анализа сигналов по крайней мере трех координатно-чувствительных приемников электромагнитного излучения, каждый из которых выполнен на основе линейки фотоприемников, и расположенной над ним прозрачной для излучения щели, ось которой перпендикулярна оси линейки приемников.
Известный способ ввода информации не требует проводной связи с объектом управления. Однако в качестве вводимой информации используется только один параметр величина пространственных координат источника излучения, что ограничивает возможности оператора при управлении объектом.
Целью изобретения является расширение числа управляющих воздействий при вводе информации в объект управления, зависящей от пространственных координат управляющего органа, например руки оператора.
Другой целью изобретения является обеспечение возможности последовательного ввода в объект управления нескольких управляющих воздействий.
Кроме того, целью изобретения является обеспечение возможности корректировки величины введенных управляющих воздействий.
Для решения поставленной задачи способ ввода информации в объект управления включает задание характера управляющих воздействий и их степени.
В отличие от прототипа, в процессе ввода информации определяют параметры излучения и текущие значения пространственных координат связанного с телом оператора источника излучения, вводят значения параметров излучения и пространственных координат источника излучения в объект управления. Характер управляющих воздействий (перемещение, вращение, изменение масштаба, цвета и т. д. объекта или его выделенного фрагмента) задается параметрами излучения. Степень воздействия (величина перемещения, скорость и направление вращения, степень изменения масштаба, спектрального состава цвета) задается векторной величиной разности пространственных координат источника излучения в момент начала ввода параметра излучения и в текущий момент.
Величина степени воздействия может быть зафиксирована в момент окончания ввода параметра излучения.
Корректировка фиксированного значения степени воздействия может быть осуществлена путем повторного ввода в объект управления соответствующего параметра излучения и изменения пространственных координат источника излучения.
При этом векторную величину разности пространственных координат источника излучения в момент начала повторного ввода параметра излучения и в момент начала предыдущего ввода суммируют с векторной величиной разности пространственных координат источника излучения в момент начала повторного ввода и окончания предыдущего ввода параметров излучения.
В качестве источника излучения может быть использован активный источник модулированного или кодированного излучения.
Изобретение может быть осуществлено на основе использования, например, оптической или акустической, пассивной (на основе анализа собственного излучения зондируемой поверхности) или активной (на основе анализа отраженного излучения, вырабатываемого приемопередатчиком) локации. Пример конкретного выполнения изобретения основан на использовании метода оптической локации и активного источника модулированного излучения.
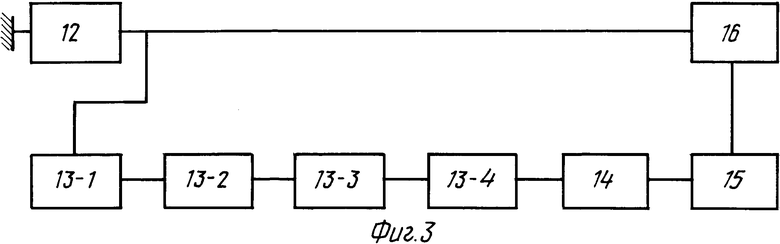
На фиг.1 изображена блок-схема устройства ввода информации в объект управления (компьютер); на фиг.2 принципиальная схема реализации способа ввода информации в объект управления; на фиг.3 блок-схема пульта управления.
Способ ввода информации в объект управления может быть реализован с помощью устройства, блок-схема которого изображена на фиг.1.
Устройство ввода информации в объект управления (фиг.1) содержит пульт управления 1 с источником излучения 2 и приемный блок 3. Приемный блок 3 содержит оптический локатор 4 и блок связи 5 оптического локатора 4 с объектом управления. В качестве объекта управления используется компьютер 6 с дисплеем 7. Оптический локатор 4 имеет оптико-механический сканер 8, блок определения мощности излучения 9, блок определения частоты модуляции 10 и блок определения азимутальных и угломестных координат 11.
Источник излучения 2 выполнен в виде источника инфракрасного излучения и имеет с оптико-механическим сканером 8 оптическую связь. Пульт управления 1 выполнен с возможностью регулирования частоты модуляции инфракрасного излучения.
Пульт управления 1 представляет собой обычную электромеханическую кнопочную конструкцию, каждая из кнопок которой предназначена для задания определенного режима работы, определенного вида управляющих воздействий. Пульт управления 1 содержит источник постоянного тока 12, четыре последовательно соединенных друг с другом электромеханических ключа 13-1 13-4, управляемый генератор 14 (например микросхема КР531ГГ1), электронный ключ 15 (например транзистор КТ603Б) и источник 2 (например светодиод на инфракрасных лучах АЛ107Г). Вход электромеханических ключей 13 соединен с одним из полюсов источника постоянного тока 12, а выход с управляющим входом управляемого генератора 14. Выход управляемого генератора 14 электрически соединен с управляющим входом электронного ключа 15. Между выходом электронного ключа 15 и полюсом источника постоянного тока 12, который соединен с входом электромеханических ключей 13, последовательно подсоединен источник излучения 2. Другой полюс источника постоянного тока 12 заземлен.
Оптический локатор 4, блок связи 5, компьютер 6 и дисплей 7 последовательно электрически соединены друг с другом. Положение оптического локатора 4 зафиксировано в пространстве относительно дисплея 7 (фиг.2).
Пульт управления 1 находится в руке оператора 16, расположенного перед экраном 17 дисплея 7.
Способ ввода информации в объект управления реализуется следующим образом.
Оператор 16 с пультом управления 1 в руке располагается перед оптическим локатором 4 и дисплеем 7. Затем оператор 16 включает в работу приемный блок 3, блок связи 5, компьютер 6 и дисплей 7. После этого оператор 16, воздействуя на пульт управления 1, включает источник излучения 2, находящийся в точке О, излучение которого модулировано с некоторой частотой fi (фиг.2).
Частота модуляции оптического излучения источника излучения 2 задается электромеханическими ключами 13-1 13-4. Путем замыкания того или иного электромеханического ключа 13-1 13-4 меняют на фиксированную величину напряжение на управляющем электроде управляемого генератора 14. Частота работы управляемого генератора 14 определяет частоту модулированного оптического излучения источника излучения 2 fi. В принципе, 4 электромеханических ключа 13 могут создать 16 фиксированных напряжений, и, следовательно, 16 фиксированных частот fi, т.е. пульт управления 1 позволяет вводить поочередно 16 различных функций.
Переменное напряжение на выходе управляемого генератора 14 с частотой fi подается на вход электронного ключа 15, который модулирует ток с этой же частотой в цепи источника излучения 2. Таким образом получается модулированный на одной из частот fi световой поток. Пространственное положение источника излучения 2, совпадающее с пространственным положением пульта управления 1, как его неотъемлемой части, фиксируется оптическим локатором 5.
Оптико-механический сканер 8 производит поэлементное зондирование пространства перед собой узким инфракрасным лучом на частоте fz. Приемная и передающие диаграммы направленности оптико-механического сканера 8 совпадают своими максимумами и примерно равны по ширине.
В процессе сканирования зондирующий луч оптико-механического сканера 8 попадет на источник излучения 2. В этот момент оптический локатор 4 зафиксирует сигнал на частоте fi, отличной от частоты зондирующего луча fz, и передаст его в компьютер, который, зафиксировав выделение, перейдет в режим ожидания величины конкретного управляющего воздействия.
При легко достижимом у оптико-механического сканера 8 угловом разрешении 1o, при секторе обзора 70•40o по азимуту и углу места соответственно и при разрешении по дальности порядка 10 см можно получить не менее 64•32•16 32 тыс. различимых положений источника излучения 2, что в сочетании, например, с набором из 5-6 функций позволяет осуществить плавный характер и многофункциональность управляющих воздействий.
Оператор 16 нажатием одной или комбинации из нескольких кнопок на пульте управления 1 устанавливает частоту модуляции излучения fi, которая определяет характер управляющих воздействий. К таким воздействиям для компьютера 6 могут относиться, например,
пространственное перемещение курсора по трем координатам;
выделение некоторого объема (фрагмента) из трехмерного изображения;
пространственное перемещение границы "окна" или выбранного фрагмента изображения;
задание вектора скорости движения метки или выделенного фрагмента изображения;
задание вектора скорости вращения выделенного фрагмента изображения;
изменение масштаба изображения или его фрагмента независимо по каждой из координат;
изменение яркости и цвета изображения или его фрагмента;
изменение интенсивности и темпа игры, управления игровым оружием;
изменение силы звука и тембра звукового сопровождения.
Сигнал от источника излучения 2, принятый оптико-механическим сканером 8, передается в блок определения азимутальных и угломестных координат 11, блок определения мощности излучения 9 и блок определения частоты модуляции 10. По частоте модуляции fi определяется характер управляющего воздействия (например f1 выделение фрагмента, f2 перемещение выделенного фрагмента в пространстве). По величине мощности принятого сигнала определяется величина дальности до источника излучения 2. По пространственному положению зондирующего луча в момент приема сигнала от источника излучения 2 определяют азимутальную и угломестную координаты источника излучения 2.
Выполнение того или иного управляющего воздействия компьютер 6 осуществляет программируемым образом.
Пусть, например, оператор 16, подведя курсор, к фрагменту изображения, например, одному из нескольких кубиков, расположенных в пространстве, установил частоту модуляции f1, соответствующую выделению некоторого объема (фрагмента) из трехмерного изображения.
Перемещая в пространстве пульт управления 1, оператор 16 выделяет фрагмент объема, в котором находится выбранный им кубик. Перемещение фиксируется приемным блоком 3 с оптическим локатором 4 и через блок связи 5 передается в компьютер 6.
Пусть, например, далее, после выполнения операции "выделение" оператор 16 установил частоту модуляции f2, соответствующую регулированию пространственного перемещения выделенного кубика по трем координатам на экране 17 дисплея 7.
Полученные пространственные координаты источника излучения 2, расположенного в момент установки частоты модуляции f2 в точке О(XO, YO, ZO) вводится в память компьютера 6. Если затем оператор 16, переместит пульт управления 1 с источником излучения 2 из точки O в точку A (Xа, Yа, Zа), то приемный блок 3 определит эти координаты и введет их в компьютер 6. По найденным координатам точек О и А определяют вектор OA(X1, Y1, Z1) пространственного перемещения источника излучения 2 из точки О в точку A (X1=XO-Xа, Y1=YO-Yа, Z1= ZO-Zа). Сигналы о величине и направлении этого вектора вводятся в компьютер 6, который выдает управляющий сигнал на дисплей 7 для перемещения кубика на величину вектора OA.
При работе в непрерывном режиме (источник излучения 2 работает непрерывно с частотой модуляции f2) перемещение кубика будет непрерывно отслеживать перемещение источника излучения 2.
Для фиксации степени воздействия (т.е. например фиксации положения кубика в пространстве) источник излучения 2 может быть выключен и с прекращением излучения разность координат в моменты начала и окончания работы источника излучения программируемым способом фиксируется и кубик останавливается в той точке пространства, которая соответствует этой разности координат.
Фиксация величины степени воздействия может быть осуществлена и без выключения источника излучения при смене характера воздействия. Например, после введения частоты модуляции f2 и перемещения кубика в какую-либо точку пространства, изменяют частоту модуляции на f4 (изменение цвета выделенного фрагмента). С вводом новой частоты (f4) величина степени воздействия ранее установленного параметра (f2) программируемым способом фиксируется.
Точно также можно вводить и другие оговоренные выше воздействия, управляющие как параметрами изображения (размером, яркостью кубика), так и параметрами его движения в пространстве.
Для того, чтобы после работы с другими выделенными предметами скорректировать ранее установленное и зафиксированное положение кубика в пространстве, необходимо на пульте управления вновь установить частоту модуляций f1, выделить кубик, затем установить частоту модуляции f2. В этом случае точкой отсчета для определения степени воздействия будет, например, точка В (Xв, Yв, Zв) нового нахождения пульта управления 1 в пространстве.
В случае, если оператор 16 решил, заканчивая подбор цвета кубика (частота f4), скорректировать затем его положение в пространстве, то в этом случае ему необходимо повторно ввести частоту f2. При смене частоты f4 на частоту f2 в момент нахождения пульта управления 1 в точке В(Xв, Yв, Zв) окраска предмета фиксируется, а для определения новой скорректированной степени воздействия вектор BA суммируется с вектором OB.
При перемещении (для корректировки положения кубика) источника излучения 2 в точку С(Xc, Yc, Zc) суммарная степень управляющего воздействия будет соответствовать сумме векторов OA и AC.
Если оператор 12, вернувшись в исходное положение (точка О), изменит характер управляющего воздействия, установив частоту модуляций f5, соответствующую, например, возможности вращения изображения кубика вокруг любой из пространственных осей, то теперь перемещение источника излучения 2 из точки О в точку А позволит задать ту или иную скорость вращения, вокруг этой оси вращения, пропорциональную соответствующей составляющей разности пространственных координат X1, Y1, Z1.
Разумеется, для передачи каждой функции нужна своя частота fi и соответствующий канал фильтрации сигнала и обработки информации в оптическом локаторе 4.
В качестве объекта управления может быть использован также, например, робот-манипулятор. В этом случае выбор той или иной частоты модуляции fi может соответствовать:
перемещению робота-манипулятора по рабочей площадке;
перемещение в пространстве отдельных его частей;
захват роботом-манипулятором обрабатываемых деталей и т.п.
Следует иметь в виду, что форма выполнения изобретения, описанная выше и показанная на чертежах, представляет собой только возможный предпочтительный вариант его осуществления. Могут быть использованы различные вариации выполнения изобретения в отношении характера управляющий воздействия и их осуществления.
Источник информации.
1. Заявка Японии N 2-18723, кл. G 06 F 3/033.
2. Войцеховский Я. Дистанционное управление моделями. Пер. с польск. М. Связь, 1977, с. 16-26.
3. Заявка РСТ (WO) N 88-05942, кл. G 06 F 3/033.

Изобретение относится к автоматике и компьютерной технике и может использоваться в телевидении и робототехнике для дистанционного ввода информации в компьютер или иной управляемый объект. Способ ввода информации в объект управления включает задание характера управляющих воздействий и их степени. В данном способе в процессе ввода информации определяют и вводят в объект управления параметры излучения и текущие значения пространственных координат связанного с телом оператора источника излучения. Характер управляющих воздействий задается параметрами излучения, а степень воздействия задается векторной величиной разности пространственных координат источника излучения в момент начала ввода параметра излучения и в текущий момент. 2 з.п. ф-лы, 3 ил.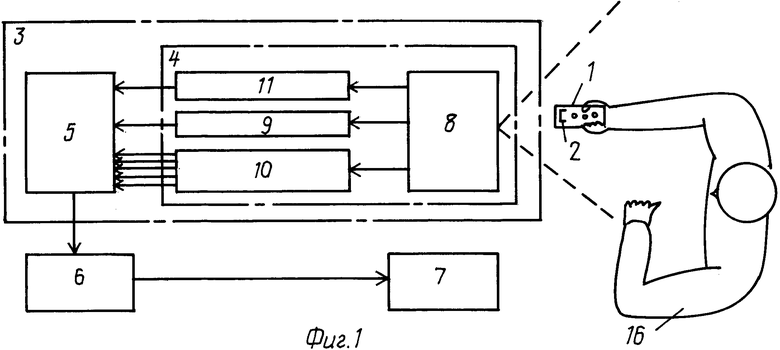
| WO, заявка, 88/05942, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
