Изобретение относится к области автоматики, компьютерной техники, телевидения и может использоваться в робототехнике, телемеханике, объемных и стереоскопических телевизорах, интерактивных компьютерных играх для дистанционного ввода двумерной или трехмерной информации в компьютер, робот, манипулятор, телевизор или иной управляемый объект.
Известно устройство ввода информации в компьютер, выполненное в виде механической трехмерной мыши [1] Ввод информации основан на ее взаимно однозначном соответствии как с двумерными координатами мыши (ее положением на плоскости), так и с положением особой кнопки, перемещаемой вертикально.
Недостатком известного технического решения является то, что перемещение кнопки в вертикальном направлении ограничено высотой мыши, что в свою очередь ограничивает точность ввода информации, определяемой вертикальной координатой.
Наиболее близким к изобретению по технической сущности и достигаемому эффекту является принимаемое за прототип устройство ввода информации в управляемый объект, реализованное для получения объемного изображения [2] Работа устройства основана на обнаружении в пространстве и последующем определении по состоянию сканирующей системы в момент обнаружения пространственных координат геометрического центра излучающей панели (в прототипе ее функции выполняют два контррефлектора) в плоскости XY, параллельной входному окну оптической сканирующей системы, причем Z-координата (расстояние до упомянутой плоскости) определяется по величине параллакса при визировании крайних точек упомянутой излучающей панели (в прототипе каждого из контррефлекторов). Работа устройства отличается высокой точностью при определении X- и Y-координат, а также приемлемой точностью определения Z-координаты в том случае, когда ось, соединяющая контррефлекторы, направлена нормально линии, проведенной от объектива оптической сканирующей системы к центру упомянутой оси. Если же упомянутая ось ориентирована в пространстве произвольно, то ошибка определения расстояния до излучающей панели пропорциональна косинусу угла между осью, соединяющей контррефлекторы, и нормалью к линии, проведенной от объектива оптической сканирующей системы к центру упомянутой оси.
Целью изобретения является уменьшение погрешности ввода информации в объект управления путем повышения точности определения координаты дальности бесконтактной оптической мыши.
Другой целью изобретения является расширение функциональных возможностей устройства ввода информации.
Сущность изобретения.
Устройство ввода информации в объект управления включает бесконтактную оптическую мышь с закрепленными на ней оптическими излучателями и стационарный приемопередающий блок, содержащий стационарный источник зондирующего излучения, оптическую сканирующую систему, процессор сигналов и интерфейс связи процессора сигналов с объектом управления.
Бесконтактная оптическая мышь имеет оптическую связь с оптически изолированными друг от друга входом оптической сканирующей системы и стационарным источником зондирующего излучения. Выход оптической сканирующей системы электрически соединен с первым входом процессора сигналов, второй вход-выход процессора сигналов с первым входом-выходом интерфейса, а второй вход-выход интерфейса с входом-выходом объекта управления.
В отличие от прототипа бесконтактная оптическая мышь содержит корпус и панель, соединенную с корпусом шарнирно с возможностью поворота вокруг взаимно перпендикулярных горизонтальных осей, одна из которых перпендикулярна фронтальной плоскости корпуса, при этом центр тяжести панели расположен ниже точки пересечения горизонтальных осей вращения, а оптические излучатели закреплены на панели на заданном расстоянии друг от друга.
Панель может иметь цилиндрическую форму и соединена о корпусом таким образом, что ее вогнутая поверхность обращена к корпусу, а прямая, соединяющая центр тяжести панели и точку пересечения горизонтальных осей вращения, параллельна образующим цилиндра, при этом оптические излучатели на панели закреплены попарно по образующим цилиндра вдоль окружностей верхнего и нижнего его оснований.
Соединение панели и корпуса может быть выполнено в виде шарового шарнира.
Соединение панели и корпуса может быть выполнено о помощью трех цилиндрических шарниров, оси вращения которых взаимно перпендикулярны.
Устройство может быть снабжено дополнительными оптическими излучателями, расположенными на корпусе бесконтактной оптической мыши таким образом, что их проекции и проекции оптических излучателей на фронтальную плоскость бесконтактной оптической мыши не перекрывают друг друга.
Корпус бесконтактной оптической мыши может быть выполнен в виде пистолета, а панель шарнирно соединена с передней частью ствола, при этом дополнительные оптические излучатели закреплены на стволе в плоскости, перпендикулярной его продольной оси.
Оптические излучатели и дополнительные оптические излучатели могут быть выполнены как вторичные излучатели, т.е. не являясь собственно источниками излучения, могут испускать только отраженное излучение, в частности они могут быть выполнены в виде контррефлекторов.
Дополнительные оптические излучатели могут быть выполнены первичными.
Бесконтактная оптическая мышь может содержать последовательно электрически соединенные друг с другом приемник зондирующего излучения, генератор импульсов и усилитель мощности, при этом выход усилителя мощности электрически соединен с входами дополнительных оптических излучателей.
Бесконтактная оптическая мышь может содержать последовательно электрически соединенные кнопочный переключатель и модулятор командного сигнала, выход которого электрически соединен с вторым входом усилителя мощности, при этом стационарный приемопередающий блок содержит последовательно электрически соединенные приемник командного сигнала и демодулятор командного сигнала, при этом выход демодулятора командного сигнала электрически соединен с третьим входом процессора сигналов.
Сканирующая система может быть выполнена в виде оптико-механической сканирующей системы.
Для уменьшения габаритов приемопередающего блока сканирующая система может быть выполнена
на основе передающей телевизионной трубки, чувствительной в инфракрасном диапазоне длин волн,
в виде матрицы полупроводниковых приемников излучения,
в виде матрицы полупроводниковых приемников излучения на основе приборов с зарядовой связью (ПЗС).
На фиг. 1 изображена блок-схема устройства ввода информации в объект управления (компьютер); на фиг.2 изображена блок-схема блока формирования командного сигнала; на фиг.3 изображена бесконтактная оптическая мышь в трех прямоугольных проекциях; на фиг.4 изображена система координат, используемая при определении положения и ориентации в пространстве бесконтактной оптической мыши; на фиг.5 изображена иллюстрация получения проекций контррефлекторов и дополнительных контррефлекторов на плоскую двумерную матрицу оптических приемников при произвольном повороте корпуса бесконтактной оптической мыши вокруг осей X1, Y1, Z1; на фиг.6 изображен вариант крепления панели к корпусу бесконтактной оптической мыши.
Пример осуществления изобретения.
Устройство ввода информации в объект управления, например в компьютер, 1 состоит из стационарного приемопередающего блока 2 и бесконтактной оптической мыши 3.
Стационарный приемопередающий блок 2 содержит стационарный источник зондирующего излучения 4, оптическую сканирующую систему 5, блок приема и обработки командного сигнала 6, процессор сигналов 7 и интерфейс 8 связи с компьютером 1. Процессор сигналов 7 может быть выполнен, например, на основе микросхемы "Motorolla" DSP56002. Стационарный источник зондирующего излучения 4 может быть выполнен на основе светоизлучающего диода, например светодиода АЛ107Г, излучающего в инфракрасной области спектра.
Оптическая сканирующая система 5 содержит первый объектив 9, плоскую двумерную матрицу оптических приемников 10, а также блок опроса 11. Плоская двумерная матрица оптических приемников 10 выполнена в виде матрицы полупроводниковых приемников излучения на основе приборов с зарядовой связью (ПЗС), например, марки А-1157 с числом элементов по горизонтали и вертикали соответственно 500 и 582 и размерами элемента 17х11 мкм.
Стационарный источник зондирующего излучения 4 расположен в непосредственной близости от первого объектива 9.
Блок приема и обработки командного сигнала 6 содержит второй объектив 12 и последовательно электрически соединенные фотоприемник 13 и декодер 14, при этом выход декодера 14 электрически соединен с третьим входом процессора сигналов 7.
Бесконтактная оптическая мышь 3 содержит корпус 15 и цилиндрическую панель 16, соединенную с корпусом 15 с помощью шарового шарнира 17.
Корпус 15 изготовлен таким образом, чтобы обеспечить удобство размещения бесконтактной оптической мыши 3 в руке оператора (например, в виде пистолета).
Цилиндрическая панель 16 имеет груз 18, прикрепленный к ней в области нижнего основания цилиндра. Груз 18, выполненный, например, в виде свинцовой пластины, позволяет расположить центр тяжести цилиндрической панели 16 ниже геометрического центра шарового шарнира 17.
Корпус 15 имеет левый 19 и правый 20 упоры, фиксирующие положение цилиндрической панели 16 относительно корпуса 15 при его повороте относительно вертикальной оси Y1.
На цилиндрической панели 16 попарно на расстоянии В друг от друга на прямых линиях, параллельных прямой, соединяющей центр тяжести цилиндрической панели 16 и центр шарнира, закреплены оптические излучатели.
Бесконтактная оптическая мышь 3 содержит также дополнительные оптические излучатели.
Оптические излучатели и дополнительные оптические излучатели могут быть вторичными и выполненными в виде контррефлекторов (пассивная мышь) или первичными и выполненными в виде инфракрасных оптических излучателей (активная мышь).
В примере конкретного выполнения изобретения представлен вариант, когда оптические излучатели выполнены в виде контррефлекторов 21, а дополнительные оптические излучатели выполнены в виде источников инфракрасного излучения 22. Источники инфракрасного излучения 22 закреплены на левой 23 и правой 24 планках.
Левая 23 и правая 24 планки, в свою очередь, закреплены на хомуте 25, надетом на ствол пистолета (корпус 15) и расположенном на определенном расстоянии от центра шарнира. Хомут 25 выполнен с возможностью регулировки его положения на корпусе 15.
Для подачи команд бесконтактная оптическая мышь 3 содержит блок формирования командного сигнала 26, включающий последовательно электрически соединенные кнопочный переключатель 27, кодер 28, усилитель мощности 29, при этом выход усилителя мощности 29 электрически соединен с входами источников инфракрасного излучения 22.
Для осуществления работы источников инфракрасного излучения 22 в режиме зондирования бесконтактная оптическая мышь 3 содержит последовательно электрически соединенные друг с другом приемник зондирующего излучения 30 и генератор импульсов 31, при этом выход генератора импульсов 31 электрически соединен с входом усилителя мощности 29.
Электропитание электрической схемы бесконтактной оптической мыши 3 осуществляется от стандартного миниатюрного аккумулятора или батарейки (на фигурах не показано).
Контррефлекторы 21 и источники инфракрасного излучения 22 имеют с первым объективом 9 оптическую связь, выход оптической сканирующей системы 5 электрически соединен с первым входом процессора сигналов 7, второй вход-выход процессора сигналов 7 электрически соединен с первым входом-выходом интерфейса 8, а второй вход-выход интерфейса 8 электрически соединен с входом-выходом компьютера 1.
Стационарный приемопередающий блок 2 подключен к внешнему источнику питания (на фигурах не показано).
Цилиндрическая панель 16 может быть соединена с корпусом 15 с помощью шарикоподшипника 32 (фиг. 6), к внутренней обойме которого диаметрально противоположно относительно друг друга прикреплены цилиндрические гнезда 33. В цилиндрических гнездах 33 двумя противоположными концами одной из своих поперечин с возможностью поворота в цилиндрических гнездах установлена крестовина 34. На концах другой поперечины крестовины 34 установлена с возможностью поворота вокруг ее оси жестко связанная с корпусом 15 консоль 35. Это один из вариантов шарнирного соединения цилиндрической панели 16 с корпусом 15.
Устройство ввода информации в объект управления работает следующим образом.
В процессе осуществления ввода информации в компьютер 1 оператор (на фигурах не показан), воздействуя на ту или иную кнопку 27а кнопочного переключателя 27 блока формирования командного сигнала 26, с помощью кодера 28 задает тот или иной код сигнальной посылки для источников инфракрасного излучения 22.
Распространяясь в широком телесном угле, кодированный командный сигнал попадает через второй объектив 12 на фотоприемник 13. Превратившись в фотоприемнике 13 из оптической формы в электрическую, командный сигнал поступает на декодер 14. С декодера 14 декодированный командный сигнал поступает в процессор сигналов 7, который и устанавливает тот или иной характер управляющего воздействия.
Управляющие воздействия могут, например, обеспечивать
задание режима клавиши "Enter" ("Ввод") на клавиатуре компьютера 1,
задание режима выделения некоторого объема (фрагмента) из трехмерного изображения,
задание режима пространственного перемещения курсора или выбранного фрагмента изображения по трем координатам,
задание режима изменения скорости движения выделенного фрагмента изображения вдоль по любой из координат или в произвольном направлении,
задание режима вращения выделенного фрагмента изображения вокруг любой из трех осей или их комбинации,
задание режима изменения масштаба изображения или его фрагмента независимо по каждой из координат,
задание режима изменения яркости и цвета изображения или его фрагмента,
задание режима изменения силы звука и тембра звукового сопровождения, а также осуществлять другие управляющие воздействия.
Степень воздействия (например, направление и величина смещения, направление вращения и величина угла поворота, величина масштаба по каждой из координат, степень насыщенности по каждой из трех цветовых компонент и т.д.) определяют по векторной величине разности пространственных координат контррефлекторов 21 и инфракрасных оптических излучателей 22 в момент приема командного сигнала и в текущий момент.
Для определения пространственных координат контррефлекторов 21 и источников инфракрасного излучения 22 производят оптическое зондирование области предполагаемого нахождения бесконтактной оптической мыши 3.
В процессе зондирования стационарный источник зондирующего излучения 4 испускает инфракрасное излучение в направлении бесконтактной оптической мыши 3. Это излучение принимается контррефлекторами 21 и приемником зондирующего излучения 30 бесконтактной оптической мыши 3. От контррефлекторов 21 это излучение отражается в сторону оптической сканирующей системы 5. Сигнал с приемника зондирующего излучения 30 поступает на вход генератора импульсов 31, ответный импульс с которого, пройдя через усилитель 29, активизирует источники инфракрасного излучения 22, которые посылают в сторону оптической сканирующей системы 5 ответный сигнал, отличающийся по своим характеристикам от сигнала, вырабатываемого этими источниками инфракрасного излучения 22 при подаче той или иной команды.
Сформированное первым объективом 9 изображение контррефлекторов 21 и источников инфракрасного излучения 22 проецируется на плоскую двумерную матрицу оптических приемников 10.
Сигналы, полученные с плоской двумерной матрицы 10, блоком опроса 11 подаются на процессор сигналов 7, который по координатам контррефлекторов 21 и источников инфракрасного излучения 22 определяет пространственное положение бесконтактной оптической мыши 3 следующим образом:
по координатам верхнего Q (Xq, Yq) и нижнего W(Xw, Yw) из освещенных элементов плоской двумерной матрицы оптических приемников 10 (фиг.5) (при условии Xq Xw), сигнал от которых выше некоторой заданной пороговой величины, (т. е. по номерам их строк и столбцов) рассчитывает X- и Y-координаты проекции геометрического центра R(Xr, Yr) цилиндрической панели 16, которые являются также X- и Y- координатами (Xm и Ym) бесконтактной оптической мыши 3 на основе формул
Xr=Xm=(Xq + Xw)/2, (1а)
Yr=Ym=(Yq + Yw)/2; (1б)
используя известные значения фокусного расстояния F первого объектива 9, расстояние В между верхними и нижними контррефлекторами 21 цилиндрической панели 16, разность M Yq Yw по формуле
L=(F•B)/M
рассчитывает Z-координату, т.е. расстояние L от оптической сканирующей системы 5 до бесконтактной оптической мыши 3.
Поскольку при любом угле поворота корпуса 15 вокруг какой-либо из осей X1, Y1, Z1 цилиндрическая панель 16 под действием груза 18 будет занимать строго вертикальное положение (Xq=Xr=Xw), то величина M не будет зависеть от величины угла поворота, что и позволит уменьшить погрешность при определении координаты дальности.
Функциональные возможности устройства позволяют не только определить пространственные координаты бесконтактной оптической мыши 3, но и углы поворота α, β и γ вокруг соответственно осей X1, Y1 и Z1 (фиг.4, 5). Углы поворота a, β и γ бесконтактной оптической мыши 3 находятся следующим образом:
определяются координаты (Xs, Ys) и (Xt, Yt) проекций источников инфракрасного излучения 22 на плоской двумерной матрице оптических приемников 10 (фиг.5),
вычисляется угол поворота g (фиг.4, 5) бесконтактной оптической мыши 3 вокруг оси Z1 по формуле
g = arctg[(Yt- Ys)/(Xt- Xs)], (3)
рассчитывается угол поворотам α (фиг.4, 5) бесконтактной оптической мыши 3 вокруг горизонтальной координатной оси X1 по формуле
a = K1•(Yt+ Ys- Yq- Yw)/2 (4)
где K1- коэффициент пропорциональности,
рассчитывается угол поворота β (фиг.4, 5) бесконтактной оптической мыши 3 вокруг вертикальной координатной оси Y1 по формуле
b = K2•(Xt+ Xs- Xq- Xw)/2 (5)
где K2- коэффициент пропорциональности.
Значения углов поворота α, β и γ бесконтактной оптической мыши 3 в качестве информации подаются на вход компьютера 1.
Таким образом, из вышесказанного следует, что данное изобретение позволит уменьшить погрешность ввода информации в объект управления путем повышения точности определения координаты дальности бесконтактной оптической мыши, а также расширить функциональные возможности устройства путем обеспечения возможности ввода в объект управления информации о пространственном положении бесконтактной оптической мыши по всем ее шести степеням свободы.
Следует иметь в виду, что форма выполнения изобретения, описанная выше и показанная на фигурах, представляет собой только возможный предпочтительный вариант его осуществления. Могут быть использованы различные вариации выполнения изобретения в отношении пополнения отдельных его узлов и последовательности проведения вычислений.
Источники информации.
1. EP N 0403782, кл. G 06K 11/18, G 06F 3/033, G 06K 11/06, опубл. 27.12.90.
2. Заявка на изобретение N 4944631/09 от 25.06.1991, кл. H 04N 13/04.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ | 1996 |
|
RU2099775C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2101754C1 |
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ | 1996 |
|
RU2096821C1 |
| СПОСОБ ДИСТАНЦИОННОГО ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2108617C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2103723C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 1996 |
|
RU2105344C1 |
| КОСМИЧЕСКИЙ МНОГОРЕЖИМНЫЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ СО СКАНИРУЮЩЕЙ ГИБРИДНО-ЗЕРКАЛЬНОЙ АНТЕННОЙ | 2023 |
|
RU2826709C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В КОМПЬЮТЕР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2087029C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В КОМПЬЮТЕР | 1996 |
|
RU2123718C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МАНИПУЛЯТОРА НА СЕНСОРНОЙ ПАНЕЛИ | 2009 |
|
RU2399949C1 |





Изобретение относится к области автоматики, компьютерной техники, телевидения и может использоваться в робототехнике, телемеханике, объемных и стереоскопических телевизорах, интерактивных компьютерных играх для дистанционного ввода двумерной или трехмерной информации в компьютер, робот, манипулятор, телевизор или иной управляемый объект. Устройство ввода информации в объект управления включает бесконтактную оптическую мышь с закрепленными на ней оптическими излучателями и стационарный приемопередающий блок, содержащий стационарный источник зондирующего излучения, оптическую сканирующую систему, процессор сигналов и интерфейс связи процессора сигналов с объектом управления. Бесконтактная оптическая мышь имеет оптическую связь с оптически изолированными друг от друга входом оптической сканирующей системы и стационарным источником зондирующего излучения. Выход оптической сканирующей системы электрически соединен с первым входом процессора сигналов, второй вход-выход процессора сигналов - с первым входом-выходом интерфейса, а второй вход-выход интерфейса - с входом-выходом объекта управления. В отличие от прототипа бесконтактная оптическая мышь содержит корпус и панель, соединенную с корпусом шарнирно с возможностью поворота вокруг взаимно перпендикулярных горизонтальных осей, одна из которых перпендикулярна фронтальной плоскости корпуса, при этом центр тяжести панели расположен ниже точки пересечения горизонтальных осей вращения, а оптические излучатели закреплены на панели на заданном расстоянии друг от друга. Панель может иметь цилиндрическую форму и соединена с корпусом таким образом, что ее вогнутая поверхность обращена к корпусу, а прямая, соединяющая центр тяжести панели и точку пересечения горизонтальных осей вращения, параллельна образующим цилиндра, при этом оптические излучатели на панели закреплены попарно по образующим цилиндра вдоль окружностей верхнего и нижнего его оснований. 10 з. п. ф-лы, 6 ил.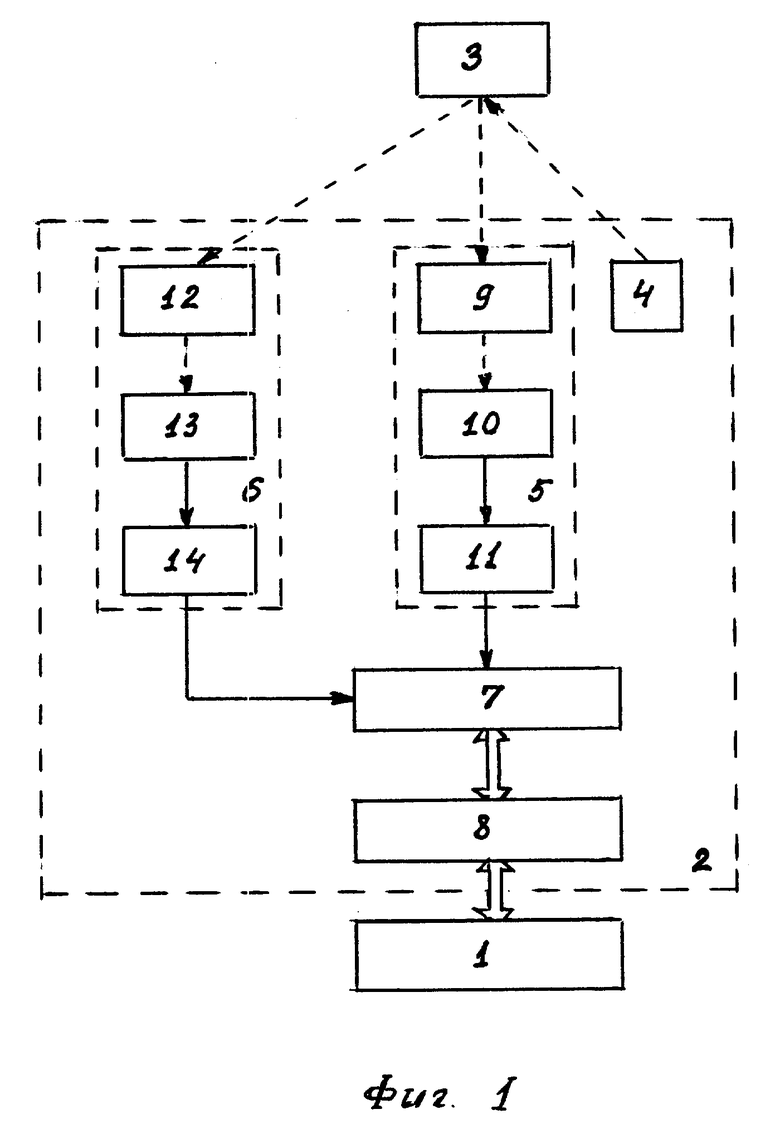
| EP, патент, 0403782, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| EP, патент, 0526015, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
