Способ определения координат точек местности.
Заявленное изобретение относится к фототопографии и фотограмметрии, может быть использовано при дистанционном зондировании Земли для определения координат объектов местности и ее картографирования, а также для создания фотограмметрических моделей объектов.
Известен способ RU 2152625 С2 (Научно-производственное объединение прикладной механики), 10.07.2000. Способ позволяет определять ориентацию объектов по навигационным радиосигналам космических аппаратов спутниковых радионавигационных систем, при котором каждые из четырех (пяти) антенноприемных устройств двухбазового интерферометра со взаимно ортогональными базами, установленными на объектах, принимают навигационные радиосигналы.
Указанный способ включает сложную математическую обработку данных от космических аппаратов спутниковых радионавигационных систем (СРНС), принятых четырьмя (пятью) антенно-приемными устройствами, что усложняет реализацию способа и одновременно снижает оперативность определения элементов внешнего ориентирования.
Также известен способ RU 2597024 С1 (Андронов В.Г., Емельянов С.Г.), 10.09.2016, состоящий в измерении на интервале съемки значений углов тангажа, крена и рыскания и составляющих угловой скорости космического аппарата гироинерциальными датчиками и получения значений координат и составляющих скорости движения космического аппарата в моменты бортовых измерений.
Наличие сложного математического аппарата и необходимости получения совместных гироскопических и координатных определений снижает оперативность определения элементов внешнего ориентирования, одновременно усложняет реализацию способа.
Наиболее близким по существу заявляемого изобретения является способ определения угловых элементов внешнего ориентирования снимка [Способ определения элементов внешнего ориентирования снимка по изображениям летательных аппаратов: пат. 2789986 Рос. Федерация: МПК G01C 21/00 (2006.01); G01C 11/06 (2006.01) / Чернов И.В.; заявитель и патентообладатель Чернов И.В. - №2022106972; заявл. 16.03.2022; опубл. 14.02.2023, Бюл. №5] (далее - способ-прототип), включающий: размещение летательных аппаратов-марок (ЛАМ) между фотографируемой местностью и летательным аппаратом дистанционного зондирования Земли (ЛАДЗЗ); фотографирование местности и ЛАМ на фоне этой местности с одновременной фиксацией момента времени фотографирования, приемом и записью данных от радионавигационных систем (РНС) на ЛАДЗ и каждом ЛАМ; передача на устройство обработки изображения местности, данных о моменте фотографирования, данных от РНС; преобразование данных от РНС в данные местоположения (координаты) ЛАДЗ в момент фотографирования и в данные местоположения (координаты) не менее трех ЛАМ в момент фотографирования; вычисление элементов внешнего ориентирования снимка (целесообразно пользоваться терминами - элементы внешнего ориентирования съемочной камеры [Чибуничев А.Г. Фотограмметрия: учебник для вузов. М.: Изд-во МИИГАиК. - 2022. - 328 с.; с. 11]).
Элементы внешнего ориентирования (ЭВО) камеры позволяют выполнить определения координат местности для ее картографирования. Для повышения точности реализации способа-прототипа необходимо увеличивать расстояние между ЛАДЗЗ и ЛАМ. Чем больше будет расстояние между ЛАДЗЗ и ЛАМ, тем точнее будут определены элементы внешнего ориентирования камеры и, как следствие, точнее будет выполнено определение координат местности (объектов).
Способ-прототип имеет существенные недостатки, состоящие в том, что:
диапазон размещения ЛАМ ограничивается пространством между фотографируемой местностью (объектом съемки) и ЛАДЗЗ;
проекции ЛАМ на снимке закрывают часть фотографируемой местности;
затруднена (ограничена) одновременная фокусировка съемочного оборудования ЛАДЗЗ на фотографируемой местности и ЛАМ;
затруднено обеспечение нахождения ЛАМ в кадре.
Заявленное изобретение предназначено для определения координат объектов местности, в отличие от способа-прототипа, по изображениям ЛАМ, полученным вспомогательной камерой, ЛАМ находятся вне зоны фотографирования объектов местности, что позволяет получить технический результат, состоящий в повышении точности определения координат объектов местности.
Технический результат достигается тем, что:
Съемочное оборудование включает две камеры, одна из них выполняет фотографирование местности (объекта) - топографическая камера, другая камера выполняет фотографирование группы ЛАМ - вспомогательная камера; фотографирование ЛАМ и местности (объекта) выполняется одновременно (ЛАМ не находятся между ЛАДЗЗ и фотографируемой местностью (объектом)); используя сигналы РНС, определяют момент времени фотографирования, координаты местоположения ЛАМ и ЛАДЗЗ в момент фотографирования.
Данные о положениях ЛАМ в момент фотографирования и их изображения на снимке, полученном вспомогательной камерой, ЛАМ используются как опорные точки, по которым определяются ЭВО вспомогательной камеры (для последующего перехода к системе координат (СК) объекта местности; для картографирования обычно в качестве СК объекта используется референцная СК [Чибуничев А.Г. Фотограмметрия: учебник для вузов. М.: Изд-во МИИГАиК, 2022. 328 с.; стр. 11]).
Используя параметры перехода от СК топографической камеры к СК вспомогательной камеры и координаты положения объекта местности в СК топографической камеры, вычисляются координаты положения объекта местности в СК вспомогательной камеры.
Далее, используя ЭВО вспомогательной камеры, определяются координаты объекта местности в СК объекта.
В итоге способ позволяет повысить точность определения координат точек местности, создавать планы и карты без использования полевой ПВП (определение ЭВО по опорным точкам полевой ПВП включает определение путем инструментальных измерений на местности координат этих точек (путем проведения полевых работ на местности, это трудоемкие и не всегда реализуемые работы)).
Реализация способа.
ЛАДЗЗ и ЛАМ оборудуются приемниками сигналов РНС; хронографами (часами) с возможностью коррекции по сигналам РНС; устройствами обработки, хранения и передачи данных сигналов РНС, моментов фотографирования и изображений местности. Кроме того, ЛАДЗЗ оборудуется камерами: одной топографической и одной вспомогательной с возможностью ориентации друг относительно друга так, чтобы их зоны обзора не пересекались.
Если топографические и вспомогательные камеры взаимно неподвижны, то предварительно определяются параметры перехода между СК топографической и вспомогательной камер, в противном случае необходимо оборудовать ЛАДЗЗ устройством определения параметров перехода между СК топографической камеры и вспомогательной камеры.
Для реализации способа предлагается следующая последовательность действий:
- Размещение ЛАДЗЗ так, чтобы объект местности находился в поле видимости топографической камеры и размещение ЛАМ в поле видимости вспомогательной камеры.
- Одновременное фотографирование местности и ЛАМ с регистрацией момента времени фотографирования, приемом и записью данных от РНС на ЛАДЗ и каждом ЛАМ, а также регистрацией параметров перехода между СК топографической камеры и СК вспомогательной камеры.
- Передача на устройство обработки изображений местности и ЛАМ данных о моменте фотографирования, данных от РНС, параметров перехода между СК топографической камеры и СК вспомогательной камеры.
- Преобразование данных от РНС в данные местоположения ЛАМ и ЛАДЗ в момент фотографирования.
- Вычисление элементов внешнего ориентирования вспомогательной камеры.
Вычисление элементов внешнего ориентирования камеры выполняется по формулам обратной фотограмметрической засечки (ОФЗ)

где х и у - измеренные координаты изображения ЛАМ на снимке (плоские координаты);
ƒ - фокусное расстояние снимка;
X, Y, Z - координаты ЛАМ в момент фотографирования в геодезической системе координат;
Xs, Ys, Zs - координаты точки фотографирования в геодезической системе координат;
ai, bi, ci - элементы матрицы направляющих косинусов, зависящие от угловых элементов внешнего ориентирования снимка: ω - поперечный угол наклона снимка, α - продольный угол наклона снимка, κ - угол поворота снимка [А.Н. Лобанов, Фототопография. Аэрофототопографическая съемка. М.: изд. ВИА. - 1971. - 535 с.].
Для приведения уравнений вида (1) к линейному виду пользуются известным приемом разложения их в ряд Тейлора с сохранением только членов первого порядка малости. Для разложения зависимостей (1) в ряд Тейлора необходимы приближенные значения ЭВО фотоснимка. Обозначим их через (XS)0, (YS)0, (ZS)0, (α)0, (ω)0, (κ)0. В процессе решения ОФЗ ищут поправки к приближенным значениям ЭВО фотоснимка, которые обозначают как δXS, δYS, δZS, δα, δω, δκ.
В результате разложения зависимостей (1) в ряд Тейлора получают линейные уравнения:

где (х) и (у) - вычисленные координаты изображения ЛАМ на снимке с использованием приближенных значений ЭВО. Вычисленные координаты (х) и (у) будут отличаться от измеренных х и у.
Обозначают:
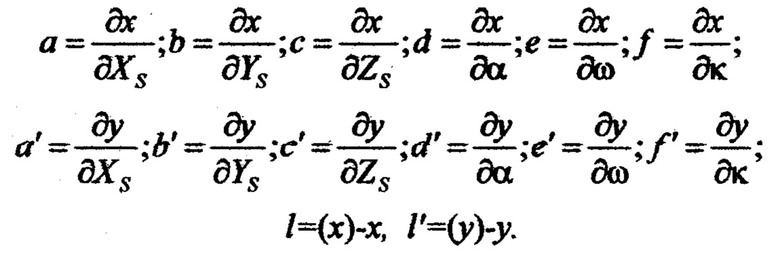
С учетом принятых обозначений составляют уравнения поправок:

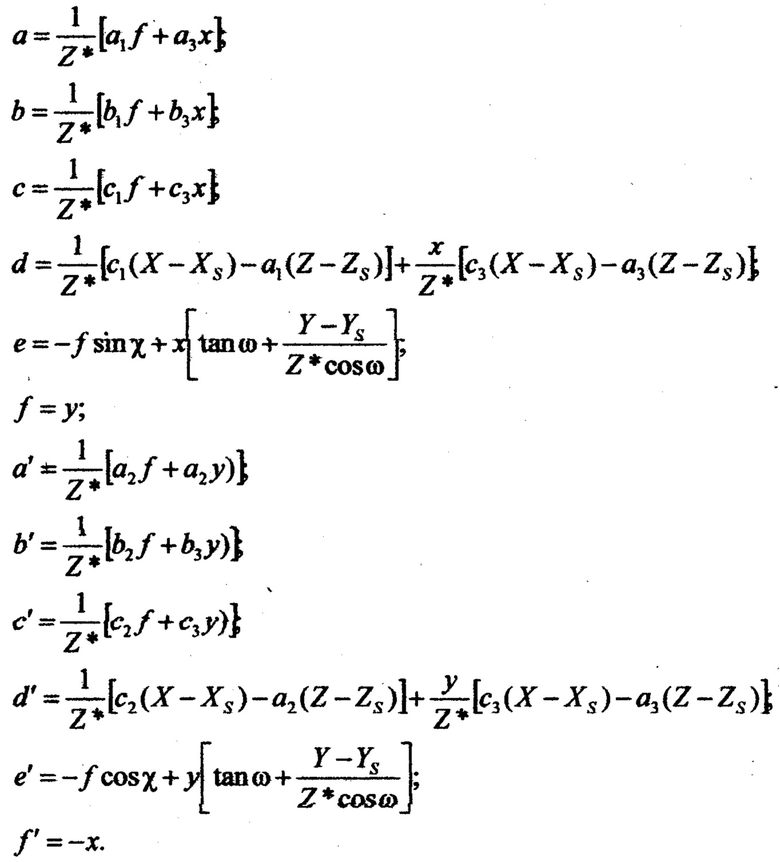
где значения коэффициентов уравнений поправок, являются частными производными зависимостей (1) по соответствующим аргументам (ЭВО фотоснимка):
Одна опорная точка позволяет составить два уравнения с весами px и py и шестью неизвестными. Для решения задачи необходимы 3 опорные точки (если необходимо обеспечить избыточность измерений, то необходимо использовать не мене 4-х опорных точек).
Систему уравнений (3) решают под основным условием метода наименьших квадратов:

- Перевычисление координат изображения объекта местности из СК топографической камеры в СК вспомогательной камеры [Пеллинен Л.П. Высшая геодезия (Теоретическая геодезия). М.: Нера. - 1978. - 264 с.; с. 11]:
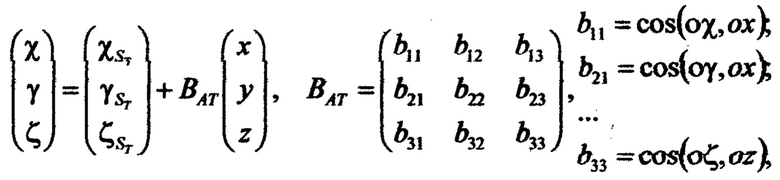
где oxyz - СК топографической камеры,  - СК вспомогательной камеры, ST - центр проекции (передняя узловая точка объектива) топографической камеры, ВАТ - ортогональная матрица направляющих косинусов, bij - направляющие косинусы пространственных углов поворота осей СК топографической камеры к осям СК вспомогательной камеры или соответствующие параметры на основе кватернионов;
- СК вспомогательной камеры, ST - центр проекции (передняя узловая точка объектива) топографической камеры, ВАТ - ортогональная матрица направляющих косинусов, bij - направляющие косинусы пространственных углов поворота осей СК топографической камеры к осям СК вспомогательной камеры или соответствующие параметры на основе кватернионов;
- Перевычисление координат изображения объекта местности из СК вспомогательной камеры в координаты: объекта в СК объекта [Чибуничев A.Г. Фотограмметрия: учебник для вузов. М.: Изд-во МИИГАиК. - 2022. - 328 с.; с. 17]:
 ,
,
где OXYZ - СК объекта или референцная СК, SA - центр проекции вспомогательной камеры, AGA - ортогональная матрица направляющих косинусов, aij - направляющие косинусы пространственных углов между осями СК OXYZ и СК вспомогательной камеры (определены в процессе решения ОФЗ); NGA - скаляр; Z'=(N+Н-Ne2)sin В [Пеллинен Л.П. Высшая геодезия (Теоретическая геодезия). М.: Нера, 1978. 264 с.; с. 10], Н - примерная высота объекта, В - примерная широта объекта, N - радиус кривизны первого вертикала объекта, е - эксцентриситет референц-эллипсоида.
Таким образом, будут получены уточненные координаты точек недоступной местности (объекта), отображенных на топографическом снимке, и будут устранены несовершенства способа прототипа.
Изобретение относится к способам определения координат объекта. Предлагаемый способ включает: размещение летательного аппарата дистанционного зондирования Земли (ЛАДЗЗ) так, чтобы объект местности находился в поле видимости топографической камеры, и размещение летательных аппаратов-марок (ЛАМ) в поле видимости вспомогательной камеры; одновременное фотографирование местности и ЛАМ с регистрацией момента времени фотографирования, приемом и записью данных от радионавигационных систем (РНС) на ЛАДЗЗ и каждом ЛАМ, а также регистрацией параметров перехода между системой координат (СК) топографической камеры и СК вспомогательной камеры; передачу на устройство обработки изображений местности и ЛАМ данных о моменте фотографирования, данных от РНС, параметров перехода между СК топографической и вспомогательной камер; преобразование данных от РНС в данные местоположения ЛАМ и ЛАДЗЗ в момент фотографирования; определение элементов внешнего ориентирования вспомогательной камеры; преобразование координат изображения объекта местности из СК топографической камеры в СК вспомогательной камеры; преобразование координат объекта местности из СК вспомогательной камеры в координаты объекта в СК объекта. Технический результат заключается в повышении точности определения координат объекта.
Способ определения координат точек местности, включающий следующие этапы: установка на летательном аппарате дистанционного зондирования Земли (ЛАДЗЗ) двух камер, одна из которых предназначена для топографической съёмки объектов местности, а другая – для вспомогательной съёмки летательных аппаратов-марок (ЛАМ), при этом установку производят таким образом, чтобы зоны обзора топографической и вспомогательной камер не пересекались; размещение ЛАДЗЗ таким образом, чтобы объект местности находился в поле видимости топографической камеры; размещение летательных аппаратов-марок (ЛАМ) в поле видимости вспомогательной камеры; фотографирование местности топографической камерой, а также фотографирование ЛАМ вспомогательной камерой с регистрацией момента времени фотографирования, приемом и записью данных от радионавигационных систем (РНС), установленных на ЛАДЗЗ и на каждом ЛАМ, а также регистрацией параметров перехода между системой координат (СК) топографической камеры и СК вспомогательной камеры; передача на устройство обработки изображений местности, полученных топографической камерой, и изображений ЛАМ, полученных вспомогательной камерой, данных о моменте фотографирования, данных от РНС, параметров перехода между СК топографической камеры и СК вспомогательной камеры; преобразование данных от РНС в данные местоположения ЛАДЗЗ и каждого ЛАМ в момент фотографирования; вычисление элементов внешнего ориентирования вспомогательной камеры; определение координат объекта местности путём пересчёта из СК топографической камеры в СК вспомогательной камеры; определение координат объекта местности путём пересчёта из СК вспомогательной камеры в координаты объекта в СК объекта.
| Способ определения элементов внешнего ориентирования снимка по изображениям летательных аппаратов | 2022 |
|
RU2789986C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТОВ В ПРОСТРАНСТВЕ, ДАЛЬНОСТИ, ПЕЛЕНГА, КООРДИНАТ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152625C1 |
| СПОСОБ ОПЕРАТИВНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ КОСМИЧЕСКОГО СКАНЕРНОГО СНИМКА | 2015 |
|
RU2597024C1 |
| US 10578434 B2, 03.03.2020. | |||

