Изобретение относится к области автоматического управления и может быть применено в станках в ЧПУ.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является интерполятор, построенный на цифровых дифференциальных анализаторах (ЦДА) [1] . Недостатком прототипа является отсутствие возможности помимо расчета основной траектории вести расчет пространственной эквидистанты к ней. При управлении станком это обстоятельство не позволяет добиться высокой точности обрабатываемой детали, т.к. невозможен ввод коррекции на размер инструмента.
Задачей, на решение которой направлено заявляемое изобретение, является расширение функциональных возможностей сферического интерполятора за счет введения в его состав блока расчета пространственной эквидистанты.
Поставленная задача достигается тем, что в сферический интерполятор, построенный на цифровых дифференциальных анализаторах с первого по десятый и сумматорах с первого по третий, причем выход первого цифрового дифференциального анализатора связан с входами интегрирующей функции второго, третьего и четвертого цифровых дифференциальных анализаторов, выход второго цифрового дифференциального анализатора связан с входами интегрирующей функции пятого и шестого цифровых дифференциальных анализаторов, выход третьего цифрового дифференциального анализатора связан с входами интегрирующей функции седьмого и восьмого цифровых дифференциальных анализаторов, выход четвертого цифрового дифференциального анализатора связан с входами интегрирующей функции девятого и десятого цифровых дифференциальных анализаторов, выходы шестого и седьмого цифровых дифференциальных анализаторов связаны с входами первого сумматора, выход которого является первым выходом сферического интерполятора, выходы восьмого и девятого цифровых дифференциальных анализаторов связаны с входами второго сумматора, выход которого является вторым выходом сферического интерполятора, выходы пятого и десятого цифровых дифференциальных анализаторов связаны с входами третьего сумматора, выход которого является третьим выходом сферического интерполятора, в отличие от прототипа введены три дополнительных цифровых дифференциальных анализатора, подключенные параллельно выходам сферического интерполятора, блок расчета пространственной эквидистанты и три дополнительных сумматора, причем выходы дополнительных цифровых дифференциальных анализаторов связаны со входами блока расчета пространственной эквидистанты, выходы сферического интерполятора и блока расчета пространственной эквидистанты связаны со входами дополнительных сумматоров, выходы дополнительных сумматоров являются новыми выходами сферического интерполятора.
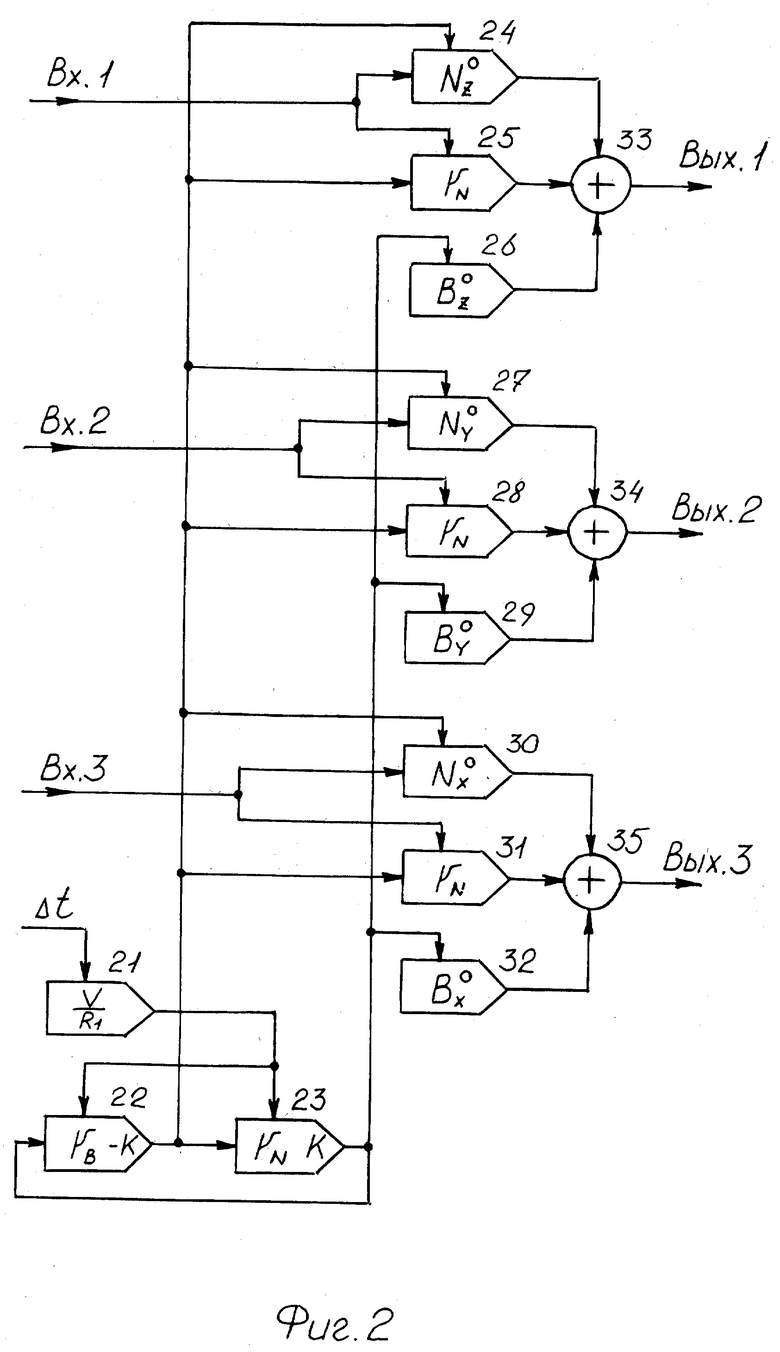
Блок расчета пространственной эквидистанты содержит цифровые дифференциальные анализаторы с первого по двенадцатый и сумматоры с первого по третий, причем вход четвертого цифрового дифференциального анализатора и вход интегрирующей функции пятого цифрового дифференциального анализатора связаны с первым входом блока расчета пространственной эквидистанты, вход седьмого цифрового дифференциального анализатора и вход интегрирующей функции восьмого цифрового дифференциального анализатора связаны со вторым входом блока расчета пространственной эквидистанты, вход десятого цифрового дифференциального анализатора и вход интегрирующей функции одинадцатого цифрового дифференциального анализатора связаны с третьим входом блока расчета пространственной эквидистанты, выход первого цифрового дифференциального анализатора связан со входами интегрирующей функции второго и третьего цифровых дифференциальных анализаторов, выход второго цифрового дифференциального анализатора связан со входами третьего, пятого, восьмого, одиннадцатого цифровых дифференциальных анализаторов и входами интегрирующей функции четвертого, седьмого, десятого цифровых дифференциальных анализаторов, выход третьего цифрового дифференциального анализатора связан со входами интегрирующей функции шестого, десятого и двенадцатого цифровых дифференциальных анализаторов, выходы четвертого, пятого и шестого цифровых дифференциальных анализаторов связаны со входами первого сумматора, выход которого является первым выходом блока расчета пространственной эквидистанты, выходы седьмого, восьмого и девятого цифровых дифференциальных анализаторов связаны со входами второго сумматора, выход которого является вторым выходом блока расчета пространственной эквидистанты, выходы десятого, одиннадцатого и двенадцатого цифровых дифференциальных анализаторов связаны со входами третьего сумматора, выход которого является третьим выходом блока расчета пространственной эквидистанты.
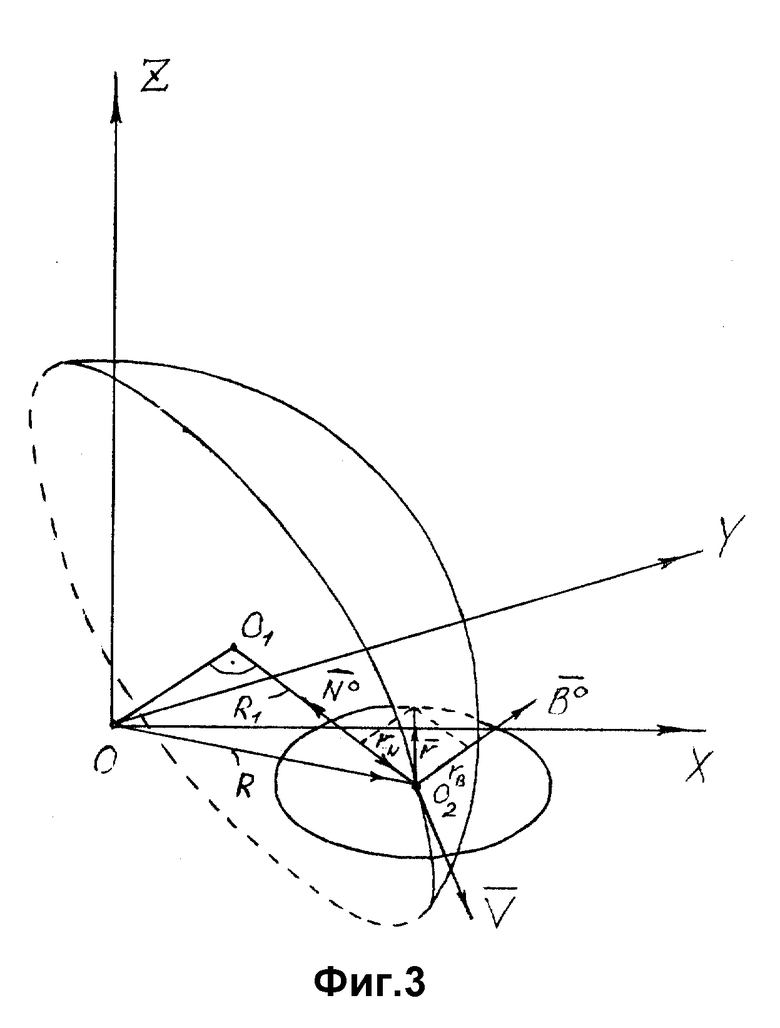
Существо устройства поясняется чертежами. На фиг.1 представлена структурная схема заявляемого сферического интерполятора. На фиг.2 представлена структурная схема блока расчета пространственной эквидистанты. На фиг.3 представлено взаимное расположение векторов, определяющих место точек эквидистанты в пространстве.
Устройство включает в себя: интерполятор [1] на ЦДА с первого по десятый (1-10) и сумматорах с первого по третий (11-13) с тремя дополнительными ЦДА 14-16, блок расчета пространственной эквидистанты 17 и три дополнительных сумматора 18-20.
Выход ЦДА 1 связан со входами интегрирующей функции ЦДА 2, 3 и 4. Выход ЦДА 2 связан со входами интегрирующей функции ЦДА 5 и 6. Выход ЦДА 3 связан со входами интегрирующей функции ЦДА 7 и 8. Выход ЦДА 4 связан со входами интегрирующей функции ЦДА 9 и 10. Выходы ЦДА 5 и 10 связаны со входами сумматора 13, выход последнего связан с входами ЦДА 3 и 15. Выходы ЦДА 6 и 7 связаны со входами сумматора 11, выход последнего связан со входами ЦДА 4 и 14. Выходы ЦДА 8 и 9 связаны со входами сумматора 12, выход последнего связан со входами ЦДА 2 и 16. Выход ЦДА 14 связан с первым входом блока расчета пространственной эквидистанты 17. Выход ЦДА 15 связан со вторым входом блока расчета пространственной эквидистанты 17. Выход ЦДА 16 связан с третьим входом блока расчета пространственной эквидистанты 17.
Выход сумматора 11 устройства и первый выход блока расчета пространственной эквидистанты 17 связаны со входами первого дополнительного сумматора 18, выход которого является первым выходом заявляемого устройства. Выход сумматора 13 устройства и второй выход блока расчета пространственной эквидистанты 17 связаны со входами второго дополнительного сумматора 19, выход которого является вторым выходом заявляемого устройства. Выход сумматора 12 устройства и третий выход блока расчета пространственной эквидистанты 17 связан со входами третьего дополнительного сумматора 20, выход которого является выходом заявляемого устройства.
Блок расчета пространственной эквидистанты 17 содержит ЦДА с первого по двенадцатый (21-23) и сумматоры с первого по третий (33-35). Вход четвертого ЦДА 24 и вход интегрирующий функции пятого ЦДА 25 связаны с первым входом блока расчета пространственной эквидистанты, вход седьмого ЦДА 27 и вход интегрирующей функции восьмого ЦДА 28 связаны со вторым входом блока расчета пространственной эквидистанты, вход десятого ЦДА 30 и вход интегрирующей функции одиннадцатого ЦДА 31 связаны с третьим входом блока расчета пространственной эквидистанты, выход первого ЦДА 21 связан со входами интегрирующей функции второго и третьего ЦДА 22 и 23, выход второго ЦДА 22 связан со входами третьего, пятого и восьмого ЦДА 23, 25 и 28, входами интегрирующей функции четвертого, седьмого и десятого ЦДА 24, 27 и 30, выход третьего ЦДА 23 связан со входами интегрирующей функции шестого, девятого и двенадцатого ЦДА 26, 29 и 32, выходы четвертого, пятого и шестого ЦДА 24, 25 и 26 связаны со входами первого сумматора 33, выход которого является первым выходом блока расчета пространственной эквидистанты, выходы седьмого, восьмого и девятого ЦДА 27, 28 и 29 связаны со входами второго сумматора 34, выход которого является вторым выходом блока расчета пространственной эквидистанты, выходы десятого, одиннадцатого и двенадцатого ЦДА 30, 31 и 32 связаны со входами третьего сумматора 35, выход которого является третьим выходом блока расчета пространственной эквидистанты.
Все входящие в состав устройства сумматоры построены по схеме следящего интегратора в режиме суммирования, частота импульсов на входе интегрирующей функции которого должна быть минимум в n раз больше частоты импульсов Δt, где n - число входов сумматора [2].
Для понимания взаимного расположения векторов, определяющих место точек эквидистанты в пространстве, обратимся к фиг.3. Обозначения: - единичный вектор нормали к плоскости окружности,
- единичный вектор нормали к плоскости окружности, - единичный вектор нормали к точке O2 окружности,
- единичный вектор нормали к точке O2 окружности, - радиус-вектор окружности с центром в точке O1,
- радиус-вектор окружности с центром в точке O1, - вектор, направленный от точки O к точке O2,
- вектор, направленный от точки O к точке O2, - радиус-вектор эквидистанты,
- радиус-вектор эквидистанты,
rn, rb - проекции радиус-вектора эквидистанты на оси N и B.
Точка любой эквидистанты к окружности с центром O1 и радиусом R1 в точке O2 принадлежит окружности с центром O2 и радиусом r, лежащей в плоскости N, B. При движении точки O2 изменяются координаты вектора  , а также возможно задание вращения вектора
, а также возможно задание вращения вектора  в координатах N и B.
в координатах N и B.
Проекции радиуса-вектора эквидистанты  на оси базовой системы координат:
на оси базовой системы координат:
rx= rnN
ry= rnN
rz= rnN
где rx, ry, rz - проекции радиуса-вектора эквидистанты на оси X, Y, Z;
rn, rb - проекции радиуса-вектора эквидистанты на оси N и B;
B
N
Вектор  определяет положение плоскости окружности в пространстве и является константой. Для вектора
определяет положение плоскости окружности в пространстве и является константой. Для вектора  справедливо:
справедливо:
В координатной форме:
N
N
N
Запишем систему (1) в виде полных дифференциалов.
drx= N
dry= N
drz= N
Вращение радиуса-вектора  в координатах N и B описывается уравнениями:
в координатах N и B описывается уравнениями:
drn= -K•V/R1•rb dt,
drb= K•V/R1•rn dt, (3)
где отношение угла поворота радиуса-вектора эквидистанты
отношение угла поворота радиуса-вектора эквидистанты  к углу поворота радиуса-вектора интерполирующей окружности
к углу поворота радиуса-вектора интерполирующей окружности  за время одного кадра.
за время одного кадра.
На основе уравнений (2), (3), переходя от дифференциалов к приращениям, строим блок расчета пространственной эквидистанты (фиг.2).
Приращения единичного вектора нормали ΔN
Устройство работает следующим образом. В начальный момент времени во все ЦДА записываются начальные значения всех подынтегральных функций и коэффициентов. Работа устройства начинается с момента прихода импульсов Δt, частота которых определяется требуемой скоростью движения. С выходов сумматоров 13, 12 и 11 сферического интерполятора [1] на входы ЦДА 16, 15 и 14 поступают импульсы приращений по координатам X, Y и Z соответственно. С выходов ЦДА 16, 15 и 14 устройства в блок расчета пространственной эквидистанты 17 передаются импульсы приращений проекций единичного вектора нормали  на координаты X, Y и Z соответственно. Сумматоры 20, 19 и 18 суммируют числа импульсов приращений ΔX, ΔY и ΔZ с числами импульсов приращений Δrx, Δry и Δrz, в результате чего на выход устройства поступают импульсы приращений координат X, Y и Z точки, движущейся по эквидистанте к окружности в пространстве.
на координаты X, Y и Z соответственно. Сумматоры 20, 19 и 18 суммируют числа импульсов приращений ΔX, ΔY и ΔZ с числами импульсов приращений Δrx, Δry и Δrz, в результате чего на выход устройства поступают импульсы приращений координат X, Y и Z точки, движущейся по эквидистанте к окружности в пространстве.
Итак, заявляемое изобретение позволяет значительно расширить функциональные возможности устройства за счет введения в его состав блока расчета пространственной эквидистанты. При управлении станком это позволит вводить коррекцию на размер шарового инструмента непосредственно с пульта оператора без пересчета управляющей программы.
Источники информации.
1. Ратмиров В.А. Основы программного управления станками. - М.: Машиностроение, 1978, с. 117-119.
2. Неслуховский К.С. Цифровые дифференциальные анализаторы. - М.: Машиностроение, 1968, с. 89.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПЛАЙНОВЫЙ ИНТЕРПОЛЯТОР | 2002 |
|
RU2228536C1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Устройство для коррекции эквидистанты | 1986 |
|
SU1318992A1 |
| Устройство для коррекции эквидистанты в системах числового программного управления | 1985 |
|
SU1282083A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2054349C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1998 |
|
RU2129953C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1997 |
|
RU2120850C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ЭЛЕКТРОКАРДИОСИГНАЛОВ | 2004 |
|
RU2269290C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1999 |
|
RU2148492C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2000 |
|
RU2181660C2 |
Изобретение относится к области автоматического управления и может быть применено в станках с числовым программным управлением. Техническим результатом является расширение функциональных возможностей сферического интерполятора за счет расчета пространственной эквидистанты. Интерполятор содержит цифровые дифференциальные анализаторы, блок расчета пространственной эквидистанты и сумматоры. 1 з.п.ф-лы, 3 ил.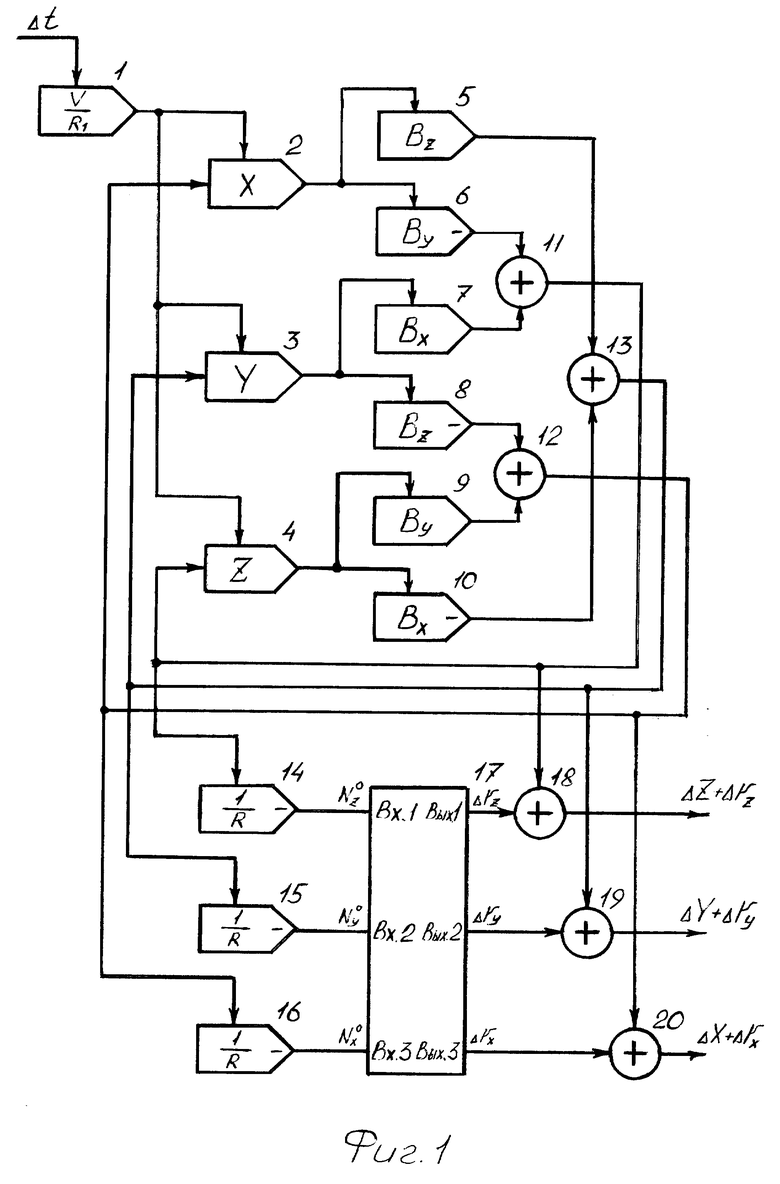
| Ратмиров В.Н | |||
| Основы программного управления станками | |||
| - М.: Машиностроение, 1978, с | |||
| Аппарат для испытания прессованных хлебопекарных дрожжей | 1921 |
|
SU117A1 |
| Неслуховский К.С | |||
| Цифровые дифференциальные анализаторы | |||
| - М.: Машиностроение, 1968, с | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
