Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления станками.
Цель изобретения - повышение точности коррекции.
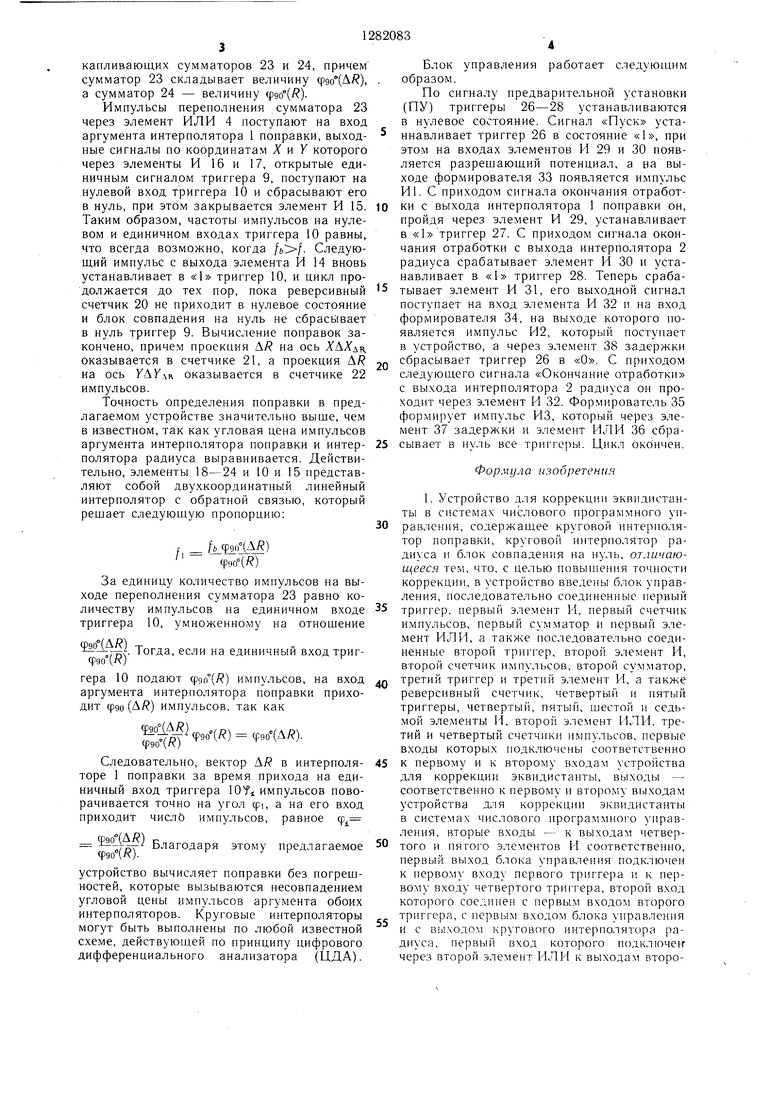
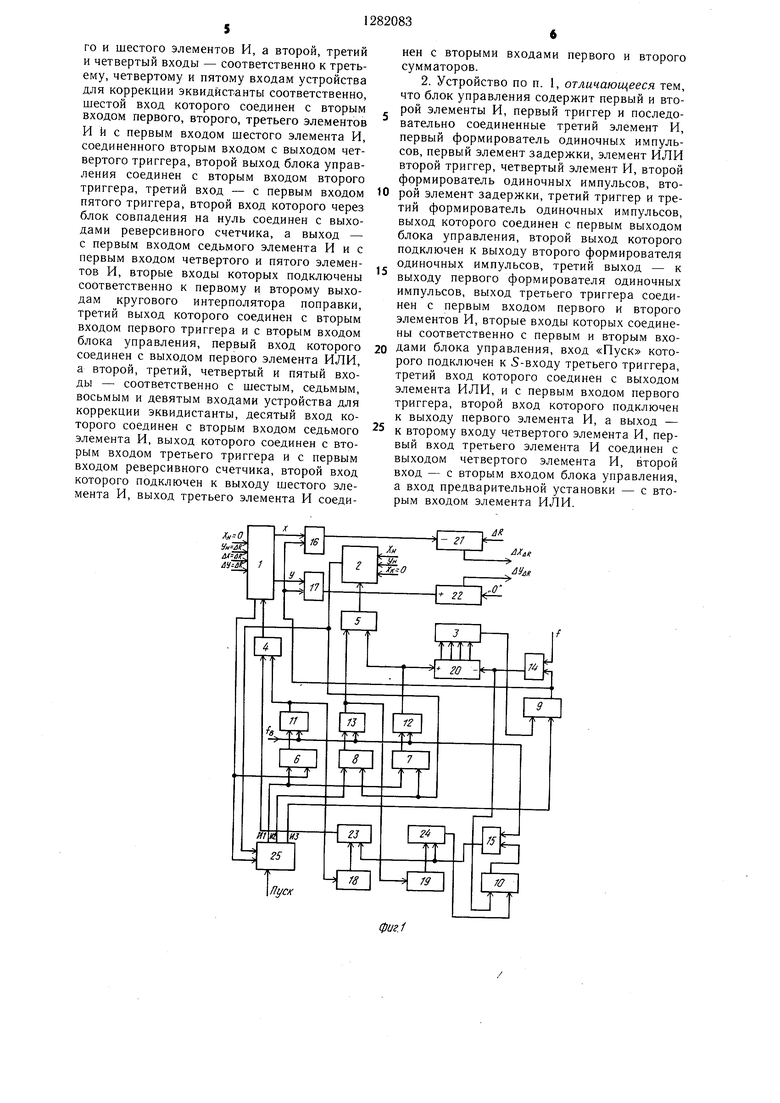
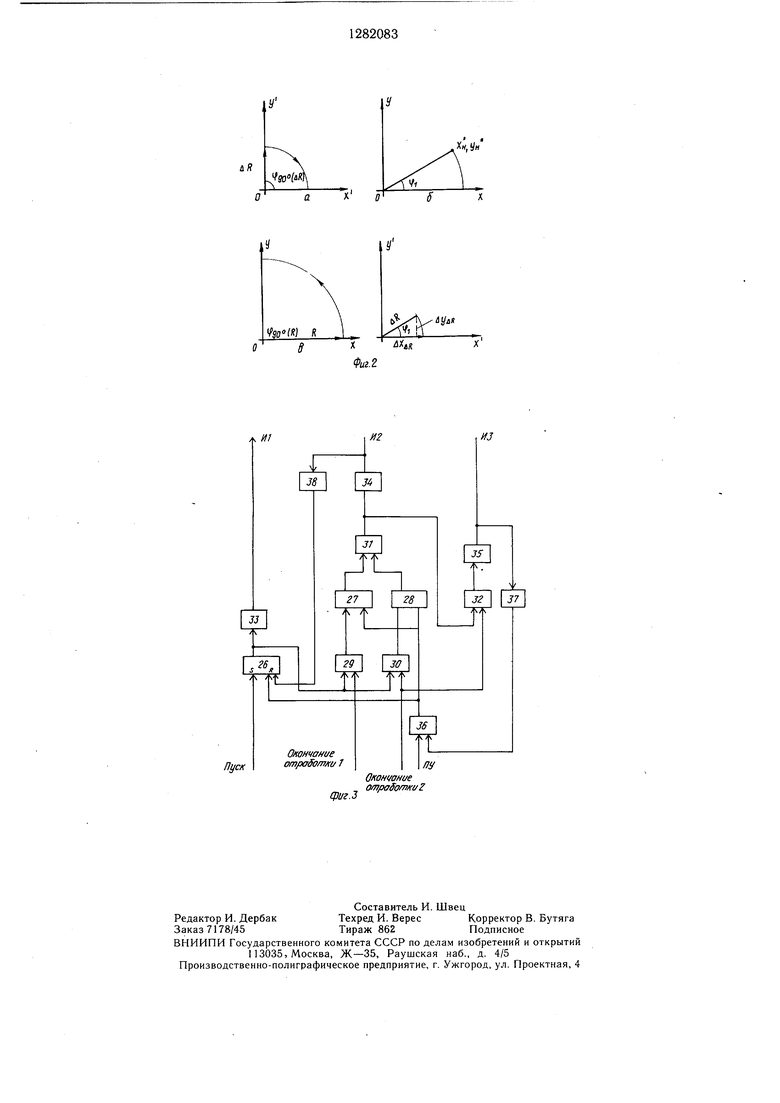
На фиг. 1 изображена структурная схема устройства; на фиг. 2 - графики, поясняющие ее работу; на фиг. 3 - блок управления.
Устройство состоит из кругового интерполятора 1 поправки (Д/), построенного по принципу цифрового дифференциального анализатора (ЦДЛ), кругового интерполятора 2 радиуса, построенного также по принципу ЦДЛ, блока 3 совпадения на ноль, элементов ИЛИ 4 и 5, триггеров 6-10, элементов И II -17, счетчиков 18-22 импульсов, накапливающих сумматоров 23 и 24 блока 25 управления. Причем иптерполято- ры могут быть построены по любой известной схеме круговых интерполяторов на ЦДЛ. Блок 3 совпадения на ноль представляет собой многовходовую схему совпадения, подключенную к счетчику 20 импульсов таким образом, что на ее выходе сигнал возникает при нулевом состоянии.счетчика. Счетчик 20 импульсов для простоты выполняют реверсивным, а счетчик 21 импульсов- вычитающим.
Блок 25 управления (фиг. 3) состоит из триггеров 26-28, элементов И 29-32, формирователей 33-35 одиночных импульсов (в простейшем случае дифференцирую- щие цепочки), элемента ИЛИ 36, элементов 37 и 38 задержки.
Перед началом работы в круговой ия- терполятор 1 (фиг. 1) поправки заносятся в качестве начальных данных Х 0, Y« Д, ДА ДК Д/. В круговой интерполятор 2 радиуса заносятся следующие начальные данные Х Х н , У , Y YH , а величина Х не заносится, так как она получается автоматически, поскольку при отработке перемещения по координате У на величину ДК Ун радиус / оказывается совмещенным с осью X. Счетчики 18-22 импульсов сбрасываются в ноль. После этого внещним сигналом включают блок 25 управления, сигналы с первого выхода устанавливает в «1 триггеры 6 и 7.
Триггер 6, устанавливаясь в «Ь, открывает элемент И 11, и импульсы высокой частоты /6 через элемент И 11 и элемент ИЛИ 4 начинают поступать на вход аргумента кругового интерполятора 1 поправки и на вход счетчика 18 импульсов, который подсчитывает их количество. Когда радиус- вектор поворачивается на 90° и совмещается с осью X (фиг. 2а), в счетчике 18 импульсов оказывается число, соответствующее углу 90° для конкретного значения поправки Д/. При этом вырабатывается в интерполяторе 1 сигнал окопчания отработки, который сбрасывает в «О триггер 6. Одновременно
0
5
0
5
0
5
с выхода элемента И 12, открытого единичным сигналом триггера 7, импульсы частоты fb начинают поступать на вход реверсивного счетчика 20 и через элемент ИЛИ 5 - на вход аргумента кругового интерполятора 2 радиуса. Круговой интерполятор 2 радиуса начинает осуществлять интерполяцию в сторону ближайщей оси (для случая, изображенного на фиг. 26, в сторону оси X).
Интерполяция продолжается до тех пор, пока радиус-вектор R не совпадет с осью X, что определяется по нулевому состоянию регистра подынтегральной функции координаты X интерполятора 2 или по числу шагов, выданных по координате У, которая в этом случае равна . Когда радиус-вектор R совмещается с осью X, в интерполяторе 2 вырабатывается сигнал окончания отработки, который сбрасывает триггер 7 в нулевое состояние. К этому моменту в реверсивном счетчике 20 код численно равен фь но угловая величина единицы этого кода в общем случае не совпадает с угловой величиной единицы кода ф9о (Д/) в счетчике 18. После получения обоих сигналов окончания блок 25 управления формирует импульс на втором выходе, который устанавливает в состояние «1 триггер 8. В результате открывается элемент И 13, и с его выхода импульсы частоты fb поступают на вход счетчика 19 импульсов и через элемент ИЛИ 5 - на вход аргумента интерполятора радиуса, в котором после поворота радиуса-вектора / (Х н , ) на величину ф| получаются следующие данные: Х« R, Y« О, ДА AY R.
Таким образом импульсы аргумента, поступая на вход интерполятора, заставляют его отрабатывать дугу 90° радиуса R. Направление поворота радиуса-вектора при этом значения не имеет (на фиг. 2в показан поворот радиуса R против часовой стрелки). Когда радиус R совмещается с осью У, отработка его заканчивается, подобно предыдущему случаю, в счетчике 19 импульсов оказывается число ф9о (), равное 90° для данного значения радиуса, причем в общем случае число (fso i (Ю, что означает что угловая цена импульсов аргумента интерполятора поправки и интерполятора 2 радиуса не одинакова и зависит от соотношения величин Д/ и R. Интерполятор 2 радиуса вырабатывает сигнал «Окончание отработки, который выключает триггер 8, и поступает на вход блока 25 управления, который вырабатывает сигнал на третьем выходе. Этот сигнал устанавливает в «1 триггер 9, в результате чего частота / с выхода элемента И 14 начинает поступать на вычитающий вход реверсивного счетчика 20 и на единичный вход триггер 10. Триггер 10 переключается в состояние «1 и открывает своим единичным входом элемент И 15. В результате импульсы высокой частоты fb начинают поступать на суммирующие входы на
капливающих сумматоров 23 и 24, причем сумматор 23 складывает величину ф9о°(Д), а сумматор 24 - величину (f9o°(R).
Импульсы переполнения сумматора 23 через элемент ИЛИ 4 поступают на вход аргумента интерполятора 1 поправки, выход- ные сигналы по координатам Л и У которого через элементы И 16 и 17, открытые единичным сигналом триггера 9, поступают на нулевой вход триггера 10 и сбрасывают его в нуль, при этом закрывается элемент И 15. Таким образом, частоты импульсов на нулевом и единичном входах триггера 10 равны, что всегда возможно, когда . Следующий импульс с выхода элемента И 14 вновь устанавливает в «1 триггер 10, и цикл продолжается до тех пор, пока реверсивный счетчик 20 не приходит в нулевое состояние и блок совпадения на нуль не сбрасывает в нуль триггер 9. Вычисление поправок закончено, причем проекция А/ на ось Л АХдк оказывается в счетчике 21, а проекция Д/ на ось УДУдн оказывается в счетчике 22 импульсов.
Точность определения поправки в предлагаемом устройстве значительно выше, чем в известном, так как угловая цена импульсов аргумента интерполятора поправки и интер- полятора радиуса выравнивается. Действительно, элементы 18-24 и 10 и 15 представляют собой двухкоординатный линейный интерполятор с обратной связью, который решает следуюшую пропорцию:
с ) Ф90Ч)
За единицу количество импульсов на выходе переполнения сумматора 23 равно количеству импульсов на единичном входе триггера 10, умноженному на отношение
Ф90°(ДЛ) -г
ri.- 1огда, если на единичный вход тригф90°()
гера 10 подают ф9о°(/) импульсов, на вход аргумента интерполятора поправки приходит ф9о (Д) импульсов, так как
5)(/г)-Ф..-(д«)Следовательно, вектор Д/ в интерполя- торе 1 поправки за время прихода на единичный вход триггера lOf импульсов поворачивается точно на угол ф, а на его вход приходит числб импульсов, равное (f
-- Благодаря этому предлагаемое
устройство вычисляет поправки без погрешностей, которые вызываются несовпадением угловой цены импульсов аргумента обоих интерполяторов. Круговые интерполяторы могут быть выполнены по любой известной схеме, действующей по принципу цифрового дифференциального анализатора (ЦДА).
5
0
0
5
0
5
0
5
0
Блок управления работает следующим образом.
По сигналу предварительной установки (ПУ) триггеры 26-28 устанавливаются в нулевое состояние. Сигнал «Пуск уста- ннавливает триггер 26 в состояние «1, при этом на входах элементов И 29 и 30 появляется разрешающий потенциал, а на выходе формирователя 33 появляется импульс И1. С приходом сигнала окончания отработки с выхода интерполятора 1 поправки он, пройдя через элемент И 29, устанавливает в «1 триггер 27. С приходом сигнала окончания отработки с выхода интерполятора 2 радиуса срабатывает элемент И 30 и устанавливает в «1 триггер 28. Теперь срабатывает элемент И 31, его выходной сигнал поступает на вход элемента И 32 и на вход формирователя 34, на выходе которого появляется импульс И2, который поступает в устройство, а через элемент 38 задержки сбрасывает триггер 26 в «О. С приходом следующего сигнала «Окончание отработки с выхода интерполятора 2 радиуса он проходит через элемент И 32. Формирователь 35 формирует импульс ИЗ, который через элемент 37 задержки и элемент ИЛИ 36 сбрасывает в пуль все триггеры. Цикл окончен.
Формула изобретения
1. Устройство для коррекции эквидистан- ты в системах числового программного управления, содержащее круговой интерполятор поправ.ки, круговой интерполятор радиуса п блок совпадения на нуль, отличающееся тем, что. с целью повьиления точности коррекции, в устройство введены блок управления, последовательно соединенные первый триггер, первый элемент И, первый счетчик импульсов, первый сумматор и первый элемент ИЛИ, а также последовательно соединенные второй триггер, второй элемент И, второй счетчик импульсов, второй сумматор, третий триггер и третий элемент И, а также реверсивный счетчик, четвертый и пятый триггеры, четвертый, пятый, шестой и седьмой элементы И, второй элемент ИЛИ. третий и четвертый счетчики и.мпульсов, первые входы которых подключены соответственно к первому и к второму входам устройства для коррекции эквидистанты, выходы - соответственно к первому и BTOpoNiy выходам устройства для коррекции эквидистанты в системах числового программного управления, вторые входы - к выходам четвертого и пятого элементов И соответственно, первый выход блока управления подключен к первому входу первого триггера и к первому входу четвертого три1тера, второй вход которого соединен с первым входом второго триггера, с первым входом блока управления и с выходом кругового интерполятора радиуса, первый вход которого подключен через второй элемент ИЛИ к выходам второго и шестого элементов И, а второй, третий и четвертый входы - соответственно к третьему, четвертому и пятому входам устройства для коррекции эквидйстанты соответственно, шестой вход которого соединен с вторым входом первого, второго, третьего элементов И и с первым входом шестого элемента И, соединенного вторым входом с выходом четвертого триггера, второй выход блока управления соединен с вторым входом второго
нен с вторыми входами первого и второго сумматоров.
2. Устройство по п. 1, отличающееся тем, что блок управления содержит первый и второй элементы И, первый триггер и последовательно соединенные третий элемент И, первый формирователь одиночных импульсов, первый элемент задержки, элемент ИЛИ второй триггер, четвертый элемент И, второй формирователь одиночных импульсов, втотриггера, третий вход - с первым входом Ю рой элемент задержки, третий триггер и третий формирователь одиночных импульсов, выход которого соединен с первым выходом блока управления, второй выход которого подключен к выходу второго формирователя одиночных импульсов, третий выход - к выходу первого формирователя одиночных импульсов, выход третьего триггера соединен с первым входом первого и второго элементов И, вторые входы которых соединены соответственно с первым и вторым вхопятого триггера, второй вход которого через блок совпадения на нуль соединен с выходами реверсивного счетчика, а выход - с первым входом седьмого элемента И и с первым входом четвертого и пятого элементов И, вторые входы которых подключены соответственно к первому и второму выходам кругового интерполятора поправки, третий выход которого соединен с вторым входом первого триггера и с вторым входом
15
тий формирователь одиночных импульсов, выход которого соединен с первым выходом блока управления, второй выход которого подключен к выходу второго формирователя одиночных импульсов, третий выход - к выходу первого формирователя одиночных импульсов, выход третьего триггера соединен с первым входом первого и второго элементов И, вторые входы которых соединены соответственно с первым и вторым вхоблока управления, первый вход которого 20 Дами блока управления, вход «Пуск котосоединен с выходом первого элемента ИЛИ, а второй, третий, четвертый и пятый входы - соответственно с шестым, седьмым, восьмым и девятым входами устройства для коррекции эквидйстанты, десятый вход которого соединен с вторым входом седьмого элемента И, выход которого соединен с вторым входом третьего триггера и с первым входом реверсивного счетчика, второй вход которого подключен к выходу шестого элемента И, выход третьего элемента И соеди25
рого подключен к S-входу третьего триггера, третий вход которого соединен с выходом элемента ИЛИ, и с первым входом первого триггера, второй вход которого подключен к выходу первого элемента И, а выход - к второму входу четвертого элемента И, первый вход третьего элемента И соединен с выходом четвертого элемента И, второй вход - с вторым входом блока управления, а вход предварительной установки - с вторым входом элемента ИЛИ.
нен с вторыми входами первого и второго сумматоров.
2. Устройство по п. 1, отличающееся тем, что блок управления содержит первый и второй элементы И, первый триггер и последовательно соединенные третий элемент И, первый формирователь одиночных импульсов, первый элемент задержки, элемент ИЛИ второй триггер, четвертый элемент И, второй формирователь одиночных импульсов, второй элемент задержки, третий триггер и тре
тий формирователь одиночных импульсов, выход которого соединен с первым выходом блока управления, второй выход которого подключен к выходу второго формирователя одиночных импульсов, третий выход - к выходу первого формирователя одиночных импульсов, выход третьего триггера соединен с первым входом первого и второго элементов И, вторые входы которых соединены соответственно с первым и вторым вхоДами блока управления, вход «Пуск кото
рого подключен к S-входу третьего триггера, третий вход которого соединен с выходом элемента ИЛИ, и с первым входом первого триггера, второй вход которого подключен к выходу первого элемента И, а выход - к второму входу четвертого элемента И, первый вход третьего элемента И соединен с выходом четвертого элемента И, второй вход - с вторым входом блока управления, а вход предварительной установки - с вторым входом элемента ИЛИ.
л/
ЧУ«
fi
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции эквидистанты | 1986 |
|
SU1318992A1 |
| Интерполятор | 1978 |
|
SU813365A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1282082A1 |
| Система для программного управления | 1986 |
|
SU1327063A1 |
| Устройство для задания угла в системах числового программного управления станками | 1987 |
|
SU1495747A1 |
| Система для программного управления | 1986 |
|
SU1324011A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU807236A1 |
| Устройство для измерения угла в системах числового программного управления | 1991 |
|
SU1837257A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Система для программного управления | 1985 |
|
SU1325410A1 |
Изобретение относится к области автоматики и вычислительной техники, в частности к системам ЧПУ станками. Цель - повышение точности коррекции. Устройство содержит круговые интерполяторы поправки и радиуса и схему совпадения. Оба интерполятора построены по принципу цифрового дифференциального анализатора. В устройство введены два элемента ИЛИ, пять триггеров, семь элементов И, пять счетчиков, два накапливающих сумматора, схема управления и связи между элементами. Интерполятор радиуса работает по импульсам частоты, а интерполятор поправки - по импульсам высокой частоты. В данном устройстве повышается точность расчета эквидистанты, упрощается программирование, поскольку отпадает необходимость учета ошибок и их компенсации. 1 з. п. ф-лы, 3 ил. Ф (Л 1чЭ ОС Ю 00 00
fa ffl К
В
ft
L
J8
27 ге
29so
/ у
Ули
иг
ИЗ
зг 37
| Левин Б | |||
| К | |||
| и Мальчик А | |||
| Ю | |||
| Методы автоматического расчета эквидистанты.- Сб | |||
| статей «Способы подготовки программ и интерполяторы для контурных систем числового управления станками.-М.: Машиностроение, 1970, с | |||
| Реверсивный дисковый культиватор для тросовой тяги | 1923 |
|
SU130A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU746431A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ коррекции эквидистанты в системах числового программного управления | 1974 |
|
SU591822A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
