Изобретение относится к области транспорта, преимущественно к движителям транспортного средства, и может быть использовано в транспортных средствах высокой проходимости: вездеходах, снегоходах и болотоходах, сельскохозяйственных машинах, строительно-дорожных машинах и т.д., а также в амфибиях. Кроме того, оно может быть использовано для быстрого преобразования транспортных средств нормальной проходимости /преимущественно, содержащих активную подвеску/ в транспортные средства повышенной и даже высокой проходимости, а при наличии водоизмещающего корпуса или поплавков - также и в амфибии.
Известен движитель транспортного средства /пат. Франции N 713978, кл. 1, гр. 10, опубл. 1931/, содержащий многозвенное опорное на грунт устройство из четного количества шарнирно соединенных между собой опорных секций с одинаковым расстоянием между геометрическими осями шарниров каждой из них /далее: гусеничный обвод/, ступицу и четное количество соединительных между ними устройств прямолинейного движения, расположенных с равным угловым шагом относительно геометрической оси ступицы в плоскости вращения движителя или в параллельной ей плоскости, и своими обращенными к обводу концами шарнирно соединенных с ним в местах, равномерно разнесенных по его длине.
Известен также движитель транспортного средства /заявка Японии N 52 - 24281, кл. МКИ2: B 60 B 9/12, опубл. 30.06.77/, содержащий гусеничный обвод, ступицу и четное количество соединительных между ними устройств прямолинейного движения, расположенных в плоскости вращения движителя или в параллельной ей плоскости и своими обращенными к ступице концами соединенных с ней в местах, расположенных с равным угловым шагом относительно ее геометрической оси, а обращенными к обводу концами шарнирно соединенных с ним в местах, равномерно разнесенных по его длине. Обращенные к ступице концы соединительных устройств соединены с ней шарнирно и одновременно могут перемещаться по имеющимся в ней прорезям.
Наиболее близким по технической сущности и по достигаемому техническому результату /прототип/ является движитель транспортного средства по пат. РФ N 2031039, кл. МКИ5: B 62 D 57/02, опубл. 1995 г, содержащий ступицу, гусеничный обвод в виде четырех шарнирно соединенных между собой опорных секций одинаковой длины и четыре радиальных соединительных между ступицей и гусеничным обводом устройства прямолинейного движения, расположенных в плоскости вращения движителя или в параллельной ей плоскости и своими обращенными к ступице концами жестко с ней соединенных или конструктивно с ней объединенных и расположенных в местах, ориентированных с одинаковым угловым шагом относительно ее геометрической оси, а обращенными к гусеничному обводу концами соединенных с ним по его шарнирам.
Приведенное выше выражение: ". ..своими обращенными к ступице концами жестко с ней соединенных или конструктивно с ней объединенных..." означает, что узел такого соединения /объединения/ выполнен таким образом, что поступательное /напр., вертикальное/ перемещение ступицы под действием приложенной к ней нагрузки приводит к принудительному опусканию шарниров обвода и к изменению его конфигурации.
Общий недостаток данного движителя состоит в ограниченности его функциональных возможностей.
Первый конкретный недостаток данного движителя состоит в том, что при движении по местности он с трудом идет по песку и/или преодолевает ямы.
Второй конкретный недостаток данного движителя состоит в том, что при движении по дороге он имеет недостаточную скорость.
Третий конкретный недостаток данного движителя состоит в том, что при движении по местности он не создает достаточного большого клиренса, а при движении на плаву он не создает достаточного упорного давления.
Общими достигаемым техническим результатом изобретения является устранение указанного общего недостатка и разработка движителя с расширенными функциональными возможностями.
Первым конкретным достигаемым техническим результатом изобретения является устранения первого конкретного недостатка и разработка движителя, при движении по местности легко идущего по песку и/или преодолевающего ямы.
Вторым конкретным достигаемым техническим результатом является устранение второго конкретного недостатка и разработка движителя, имеющего при движении по дороге высокую скорость.
Третьим конкретным достигаемым техническим результатом является устранение третьего конкретного недостатка и разработка движителя, обеспечивающего при движении по местности достаточно большой клиренс, а при движении на плаву создающего высокое упорное давление.
Согласно изобретению общий технический результат достигается благодаря тому, что в движителе транспортного средства, содержащем ступицу, гусеничный обвод в виде четырех шарнирно соединенных между собой опорных секций одинаковой длины и четыре радиальных соединительных между ступицей и гусеничным обводом устройства прямолинейного движения, расположенных в плоскости вращения движителя или в параллельной ее плоскости и своими обращенными к ступице концами жестко с ней соединенных или конструктивно с ней объединенных и расположенных в местах, ориентированных с одинаковым угловым шагом относительно ее геометрической оси, а своими обращенными к гусеничному обводу концами соединенных с ним по его шарнирам, по меньшей мере одно соединительное устройство снабжено по меньшей мере одним фиксатором.
Для достижения первого конкретного технического результата изобретения фиксатор предназначен для фиксирования соединительного устройства в тот момент, когда расстояния между геометрической осью ступицы и геометрическими осями шарниров всех опорных секций взаимно равны. Длина соединительных устройств в течение одного оборота движителя несколько раз изменяется, что приводит к непрерывному изменению конфигурации гусеничного обвода. В момент, когда длины всех соединительных устройств взаимно равны, обвод имеет квадратную конфигурацию, а движитель, если зафиксировано хотя бы одно из его соединительных устройств, превращается в квадратное колесо. Такое колесо хорошо идет по песку и/или преодолевает ямы /см. напр. "Вокруг колеса", Изобретатель и рационализатор, 1975, N 12, с. 20/.
Для достижения второго конкретного технического результата изобретения секции движителя, зафиксированного в квадратной конфигурации, снабжены асфальтоходными башмаками, беговая дорожка которых скруглена по радиусу образуемого круглого колеса. При движении по дороге такой движитель работает как обычное круглое колесо и потому обеспечивает высокую скорость.
Для достижения третьего конкретного технического результата изобретения фиксатор предназначен для фиксирования соединительного устройства в момент, когда расстояния между геометрической осью ступицы и геометрическими осями шарниров одной пары взаимно оппозитных соединительных устройств отличаются от аналогичных расстояний другой пары таких устройств. В этот момент обвод имеет ромбическую конфигурацию, а движитель, если зафиксировано хотя бы одно из его соединительных устройств, превращается в ромбическое колесо. При движении по местности, в момент постановки на конец большой диагонали ромба, движитель обеспечивает большой клиренс, а при движении на плаву, работая в режиме двухлопастного колеса значительного радиуса, создает достаточно большое упорное давление.
Как видим, указанные отличия обеспечивают достижение заявленных технических результатов. При этом решение удовлетворяет требованию изобретательского уровня, т.к. ни известная совокупность ограничительных признаков, ни известные отличительные признаки сами по себе, по-отдельности, не обеспечивают достижения заявленных технических результатов. Эти результаты достигаются только в результате взаимодействия указанных признаков.
Сущность изобретения поясняется прилагаемыми чертежами, на которых изображено:
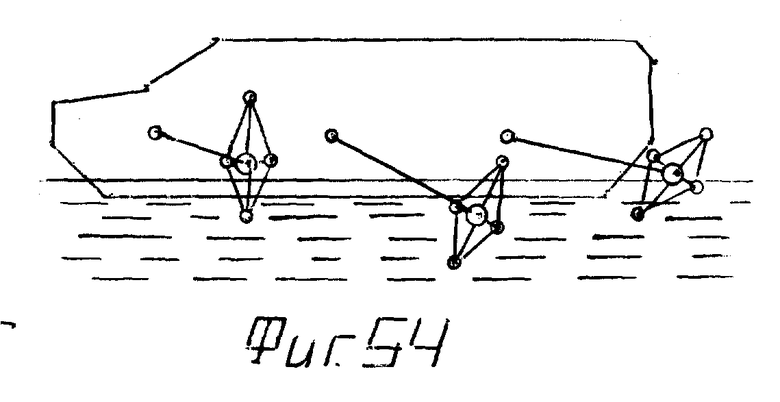
Фиг. 1 - Движитель, общий вид; вид спереди.
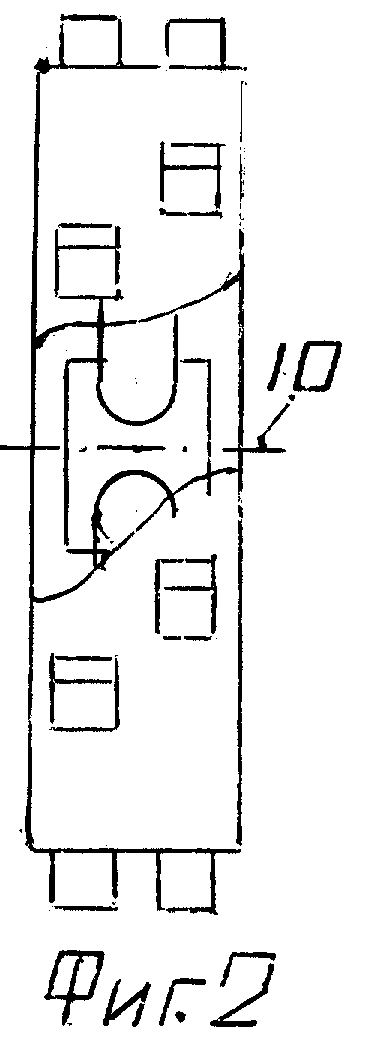
Фиг. 2 - То же; вид сбоку.
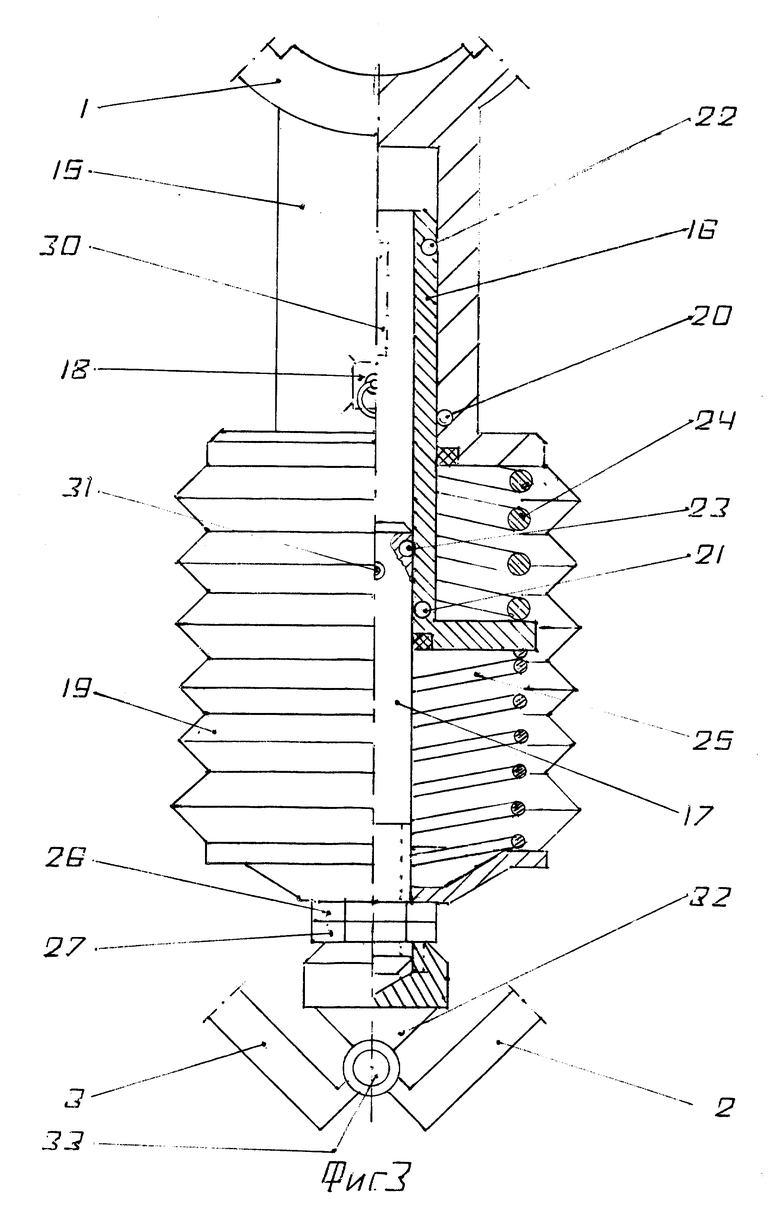
Фиг. 3 - Соединительное между ступицей и гусеничным обводом устройство, снабженное фиксатором для стопорения его колен в одном, заранее заданном положении.
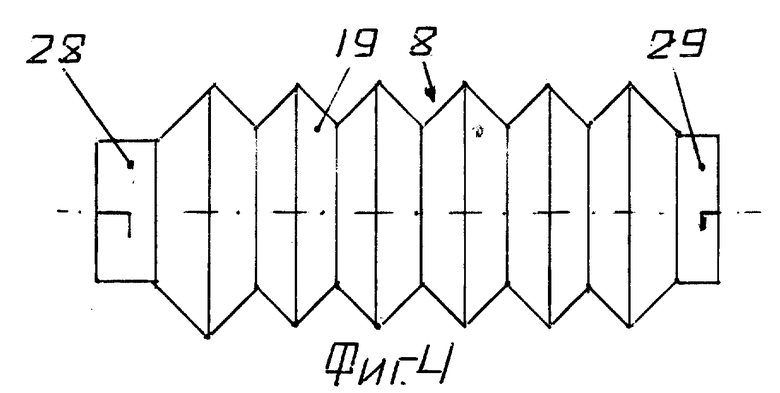
Фиг. 4 - Защитное устройство /сильфон/ для соединительного между ступицей и гусеничным обводом устройства.
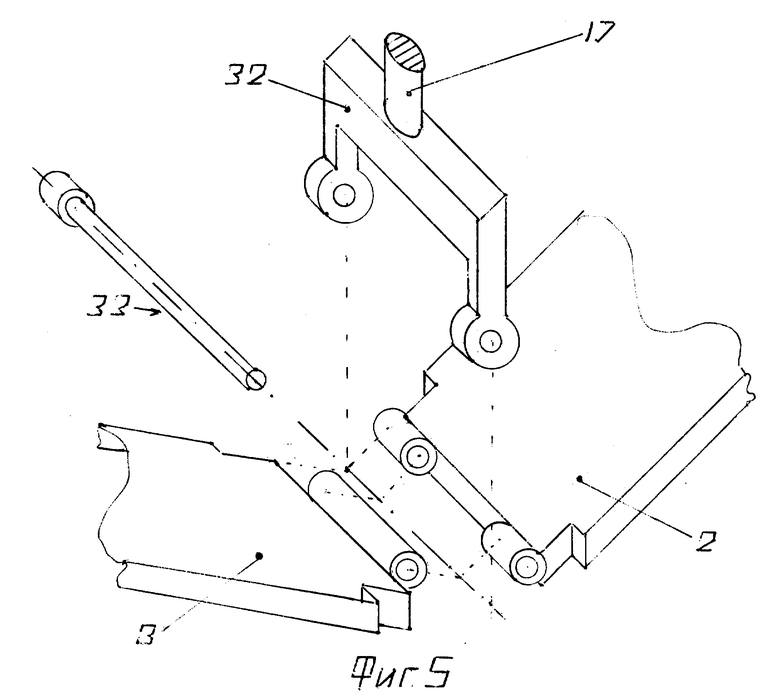
Фиг. 5 - Узел шарнирного соединения оконечной части соединительного устройства со смежными секциями гусеничного обвода; общий вид.
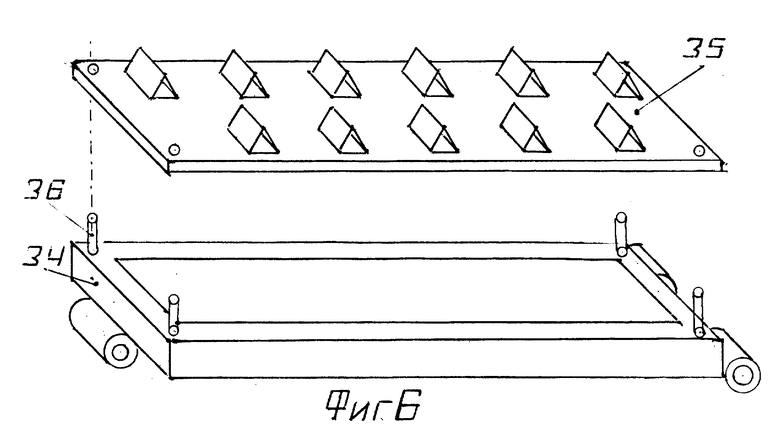
Фиг. 6 - Плоская рама секции гусеничного обвода и опорная к ней поверхность; общий вид.
Фиг. 7 - Дугообразная рама опорной секции гусеничного обвода; схема.
Фиг. 8 - Угловатая рама опорной секции гусеничного обвода; схема.
Фиг. 9 - Волнообразная рама опорной секции гусеничного обвода; схема.
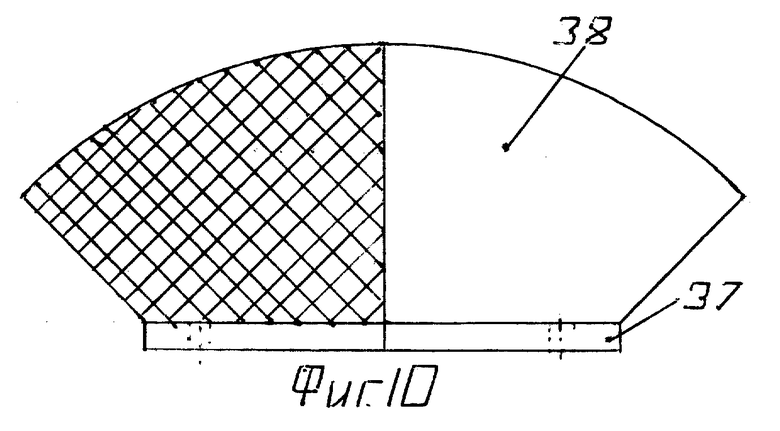
Фиг. 10 - Асфальтоходный башмак с беговой дорожкой, скругленной по требуемому радиусу качения; вид спереди.
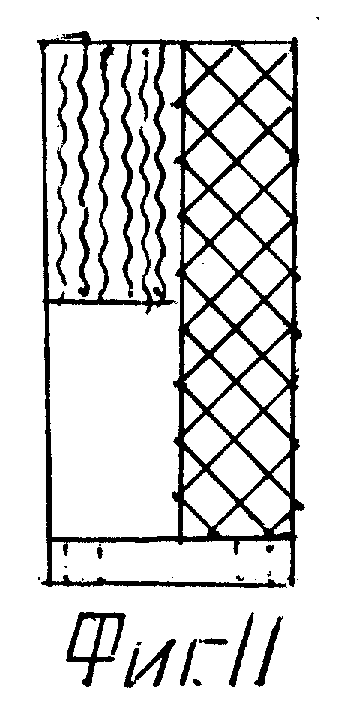
Фиг. 11 - То же, вид сбоку.
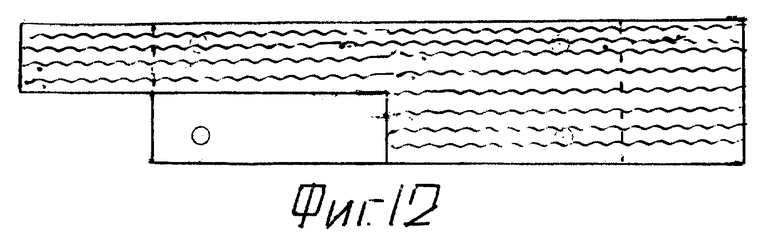
Фиг. 12 - То же, вид сверху.
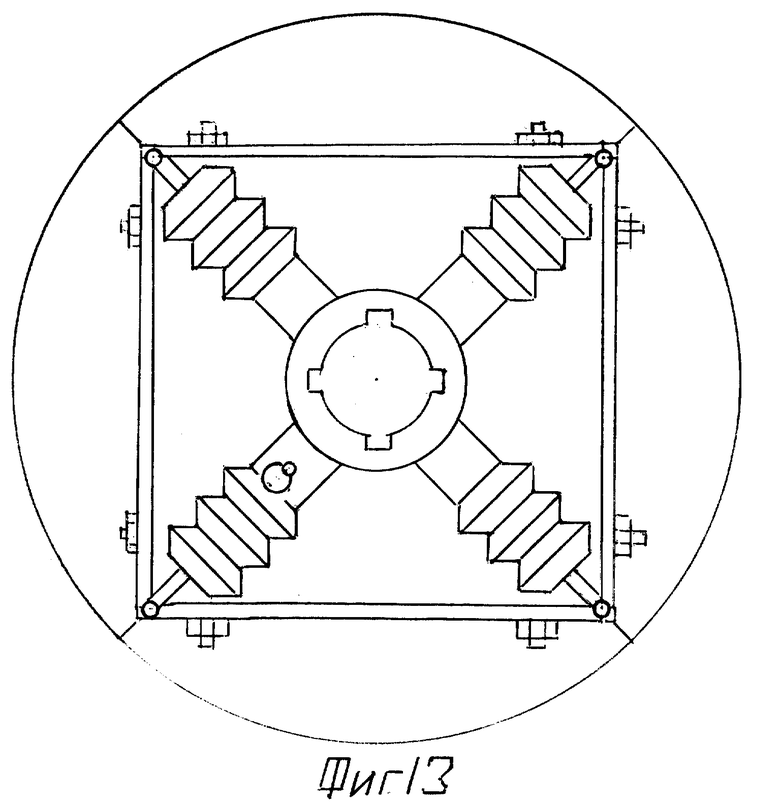
Фиг. 13 - Движитель с надетыми асфальтоходными башмаками, превратившими его в круглое колесо; общий вид.
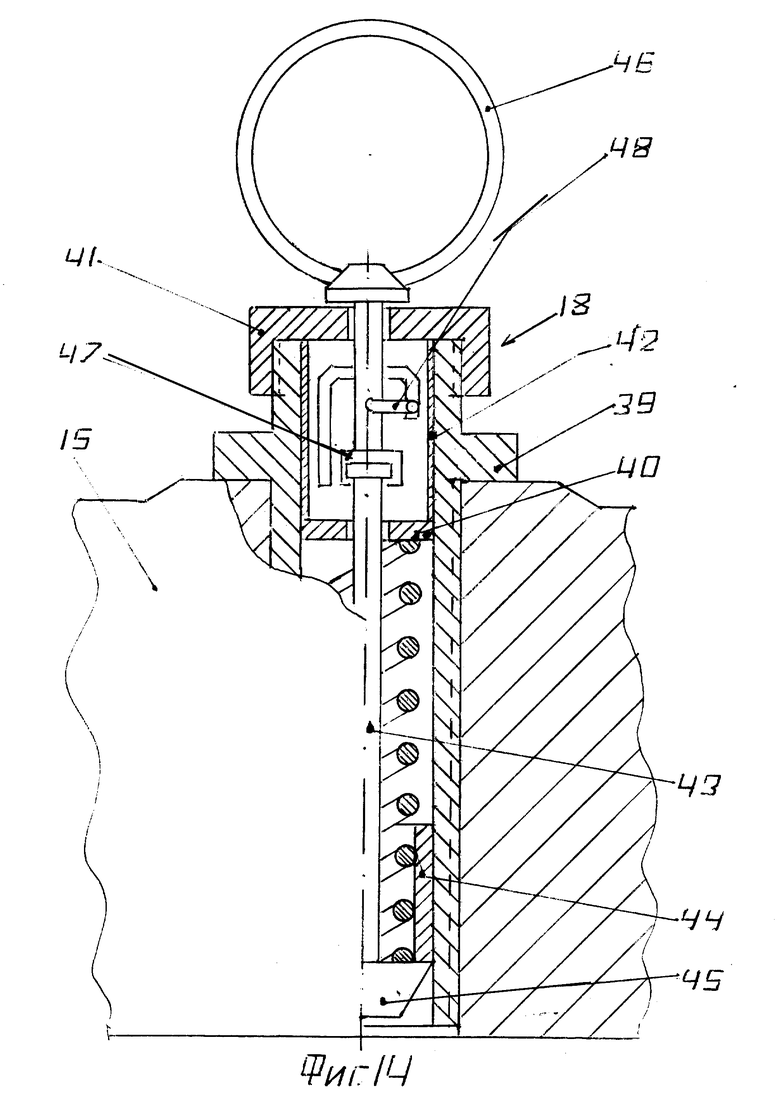
Фиг. 14 - Фиксатор для стопорения колен соединительного между ступицей и гусеничным обводом устройства в одном, заранее заданном положении; схема.
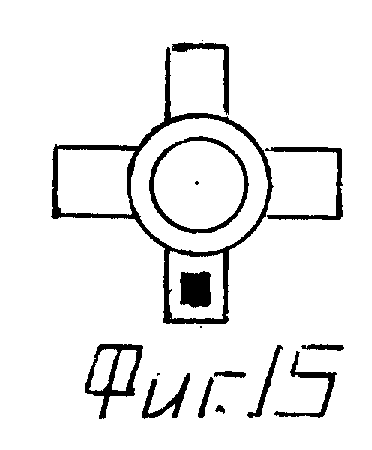
Фиг. 15 - Схема расположения на корневом колене соединительного устройства фиксатора квадратной конфигурации движителя.
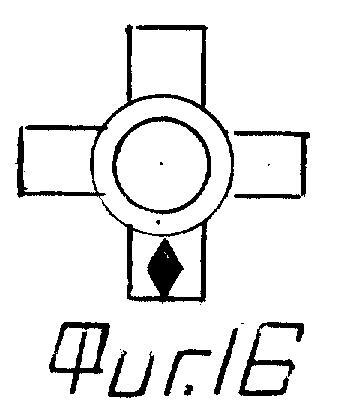
Фиг. 16 - То же, но для фиксатора его ромбической конфигурации.
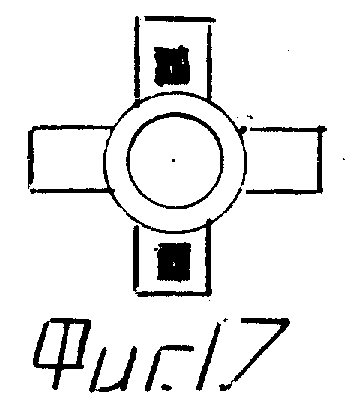
Фиг. 17 - Схема расположения на корневых коленах соединительных устройств двух фиксаторов квадратной конфигурации движителя.
Фиг. 18 - То же, но для двух фиксаторов его ромбической конфигурации.
Фиг. 19 - Схема расположения на корневых коленах соединительных устройств фиксаторов квадратной и ромбической конфигурации движителя.
Фиг. 20 - Схема расположения на корневых коленах соединительных устройств двух фиксаторов квадратной конфигурации движителя и двух фиксаторов его ромбической конфигурации.
Фиг. 21 - Соединительное между ступицей и гусеничным обводом устройство с фиксатором для стопорения его колен в любом положении.
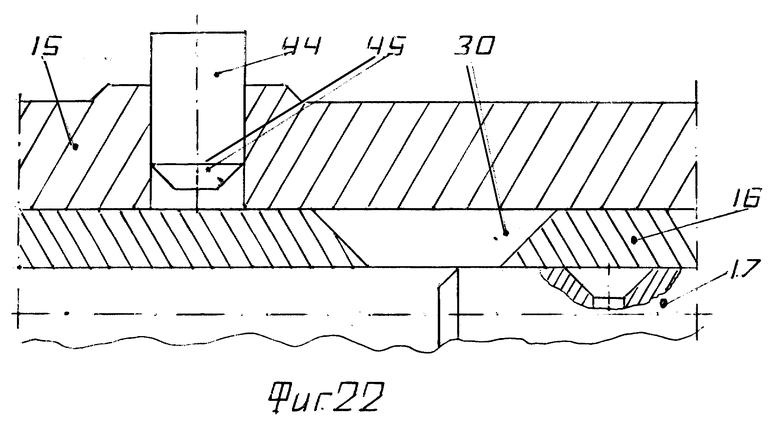
Фиг. 22 - Взаимное расположение отверстий в коленах соединительного между ступицей и гусеничным обводом устройства и фиксирующим конусом фиксатора при выключенном состоянии последнего; схема.
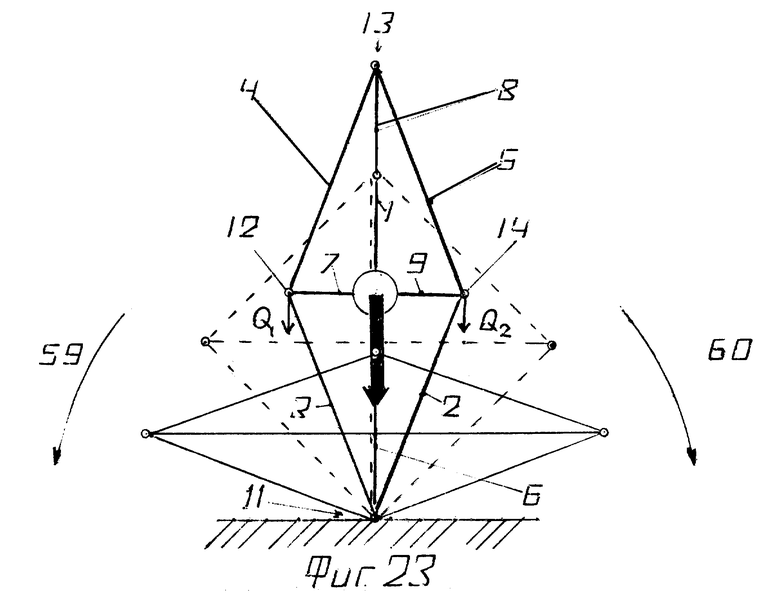
Фиг. 23 - Система сил, действующих на движитель с выключенным фиксатором при нахождении его в конфигурации "вертикальный ромб".
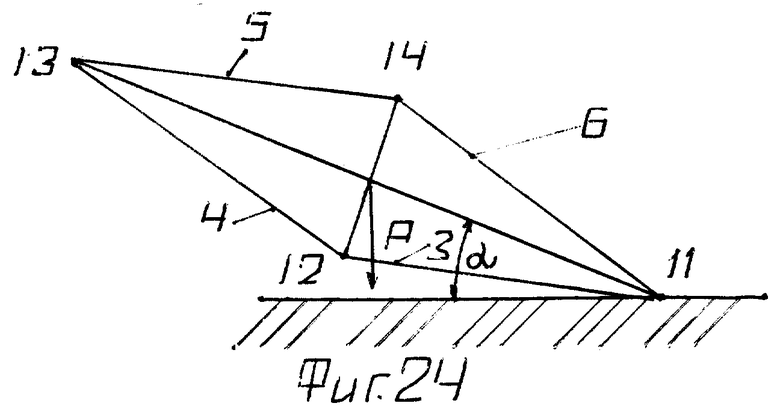
Фиг. 24 - Движитель в конфигурации "наклонный ромб".
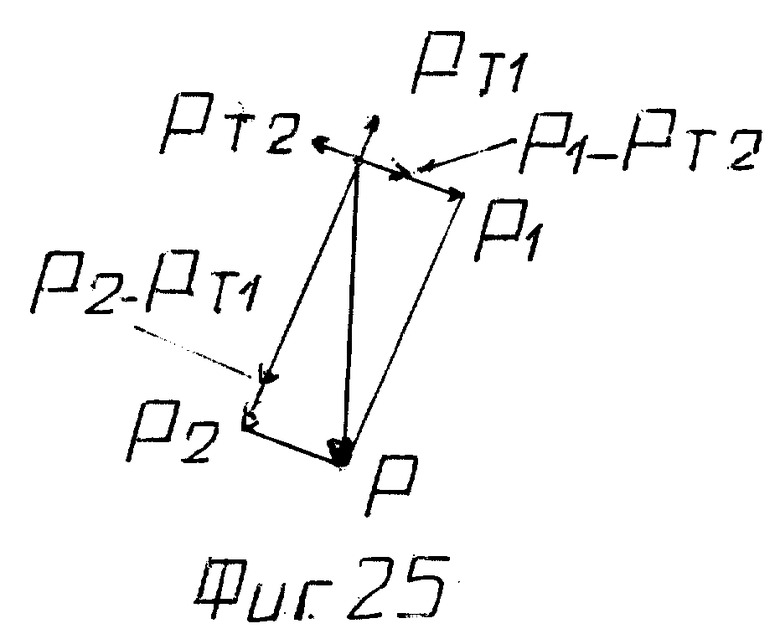
Фиг. 25 - Система сил, действующих на движитель в конфигурации "наклонный ромб".
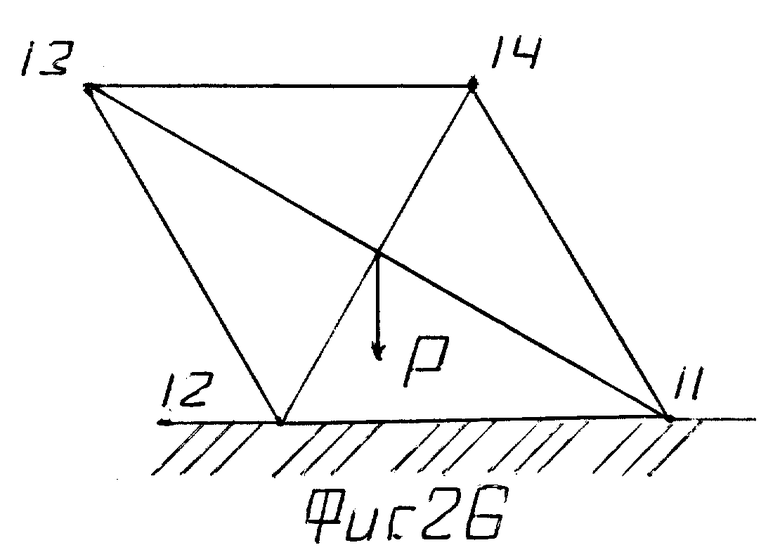
Фиг. 26 - Движитель в конфигурации "ромб с горизонтальным основанием, обращенный влево".
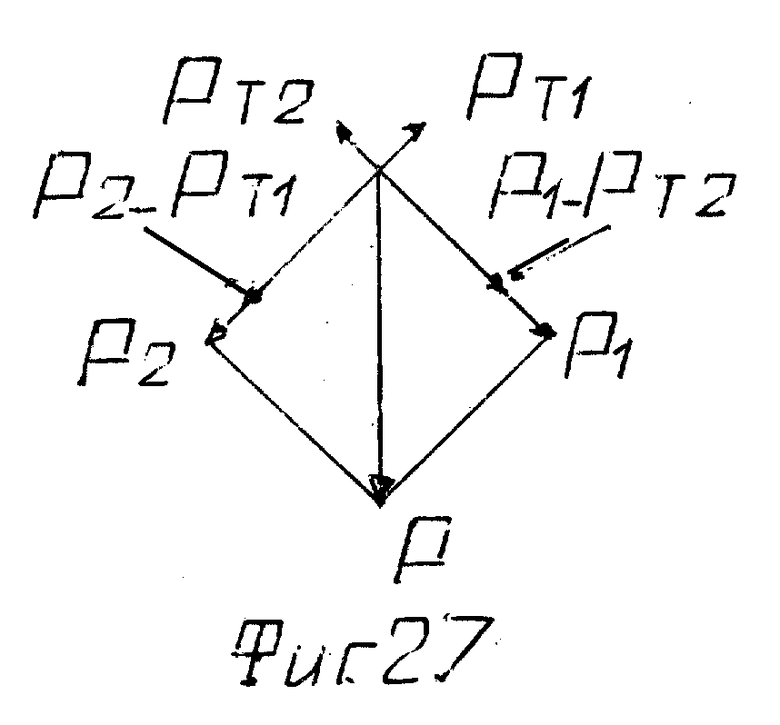
Фиг. 27 - Система сил, действующих на движитель в конфигурации "квадрат с горизонтальным основанием".
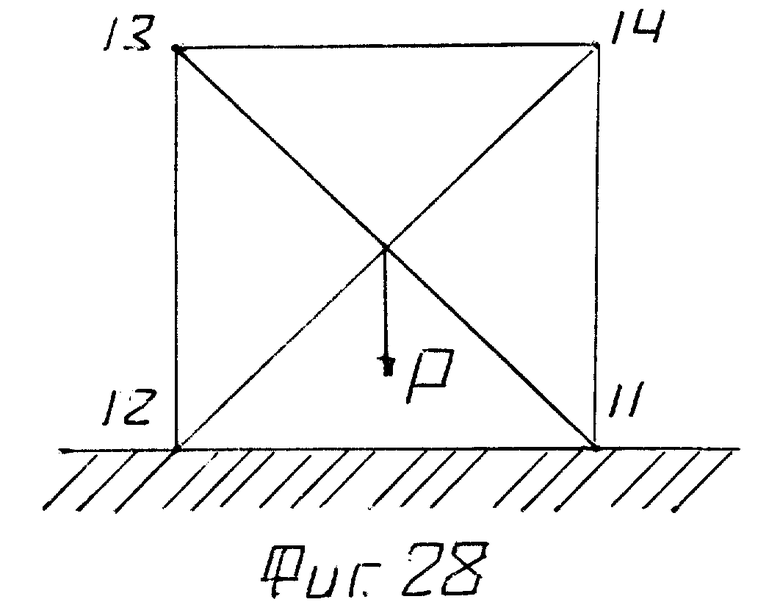
Фиг. 28 - Движитель в конфигурации "квадрат с горизонтальным основанием".
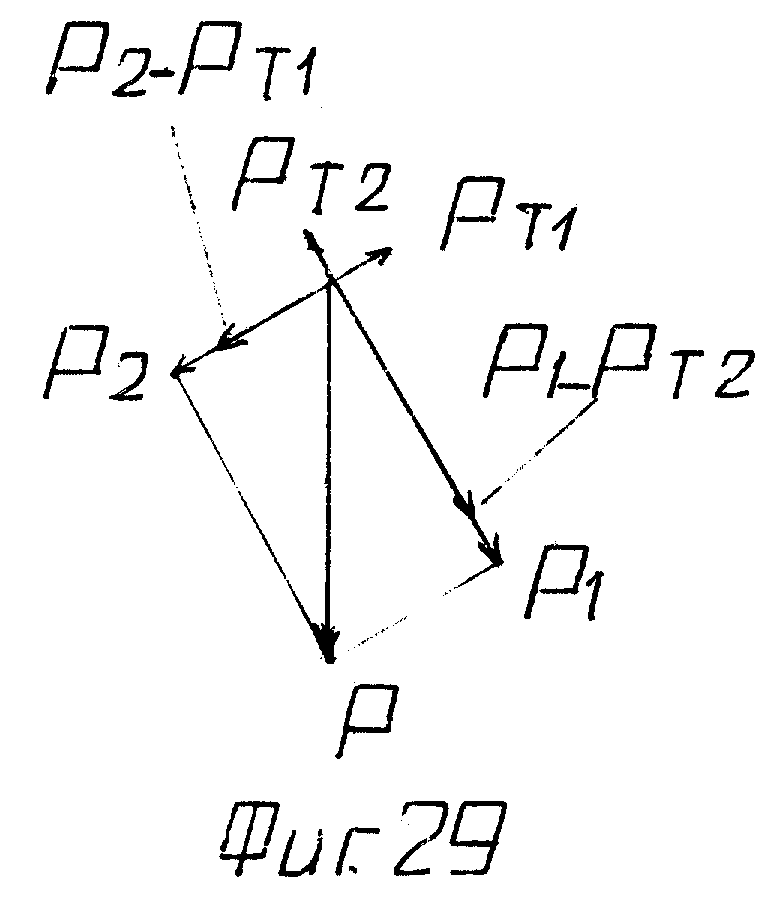
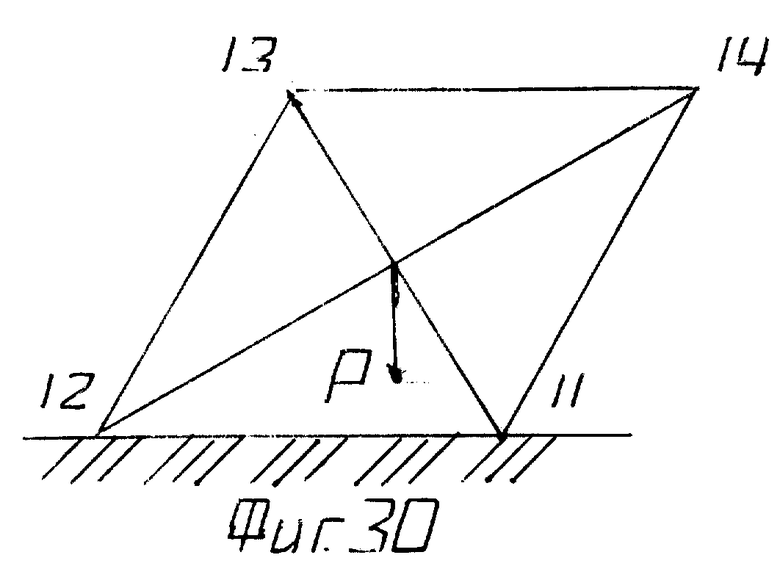
Фиг. 29 - Система сил, действующих на движитель в конфигурации "ромб с горизонтальным основанием, обращенный вправо".
Фиг. 30 - Движитель в конфигурации "ромб с горизонтальным основанием, обращенный вправо".
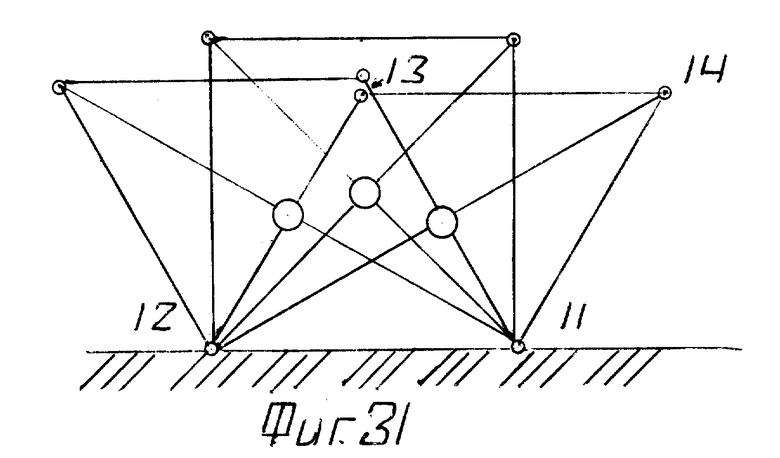
Фиг. 31 - Свободное изображение фаз перехода движителя из конфигурации "ромб с горизонтальным основанием, обращенный влево", через конфигурацию "квадрат с горизонтальным основанием", в конфигурацию "ромб с горизонтальным основанием, обращенный вправо".
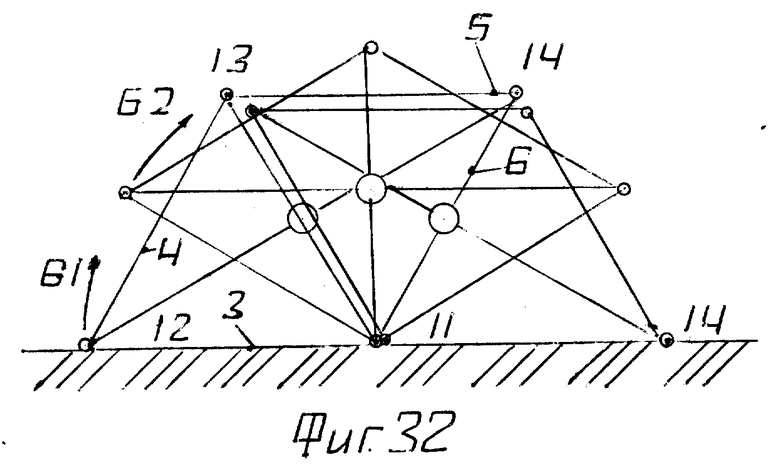
Фиг. 32 - Основные фазы перекатывания движителя в конфигурации "ромб".
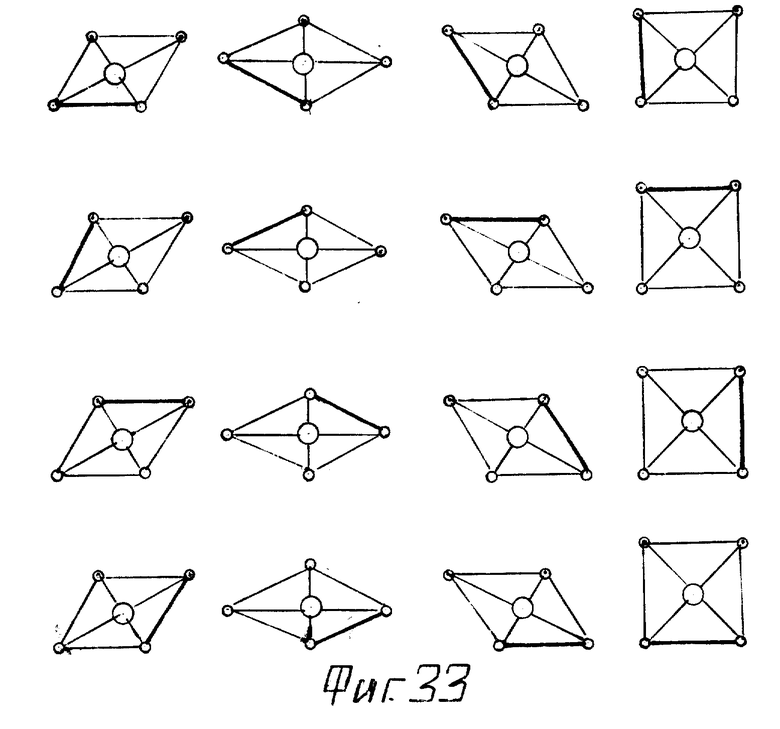
Фиг. 33 - Основные фазы рабочего цикла движителя на суше.
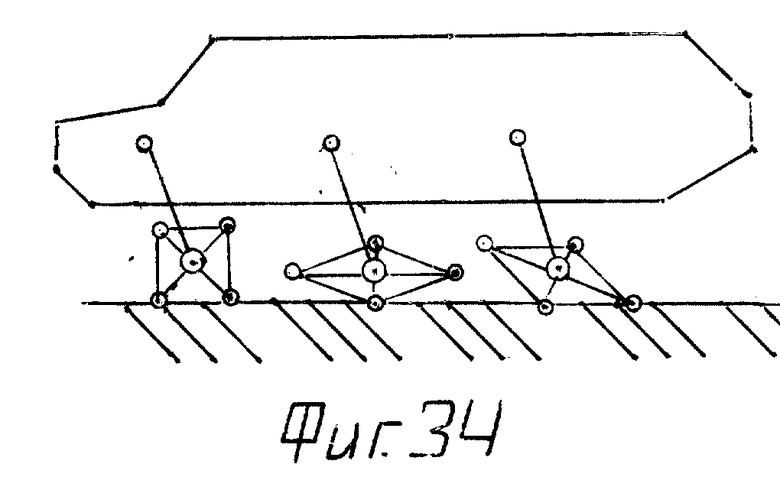
Фиг. 34 - Транспортное средство с данным движителем при движении по дороге.
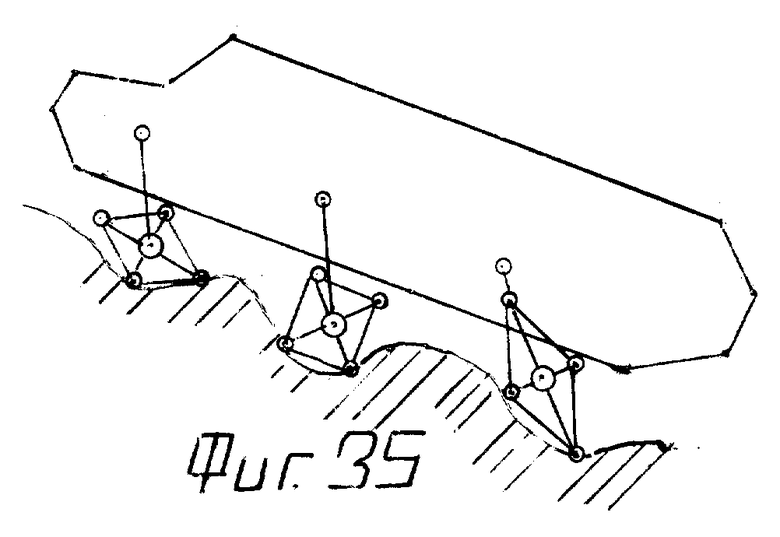
Фиг. 35 - То же, но при движении по пересеченной местности.
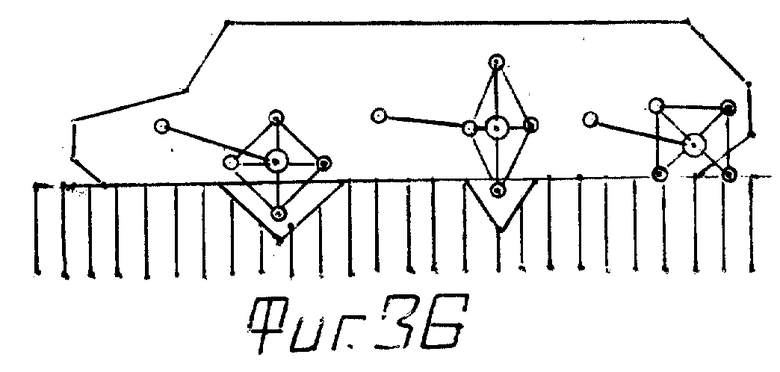
Фиг. 36 - То же, но при движении по снегу.
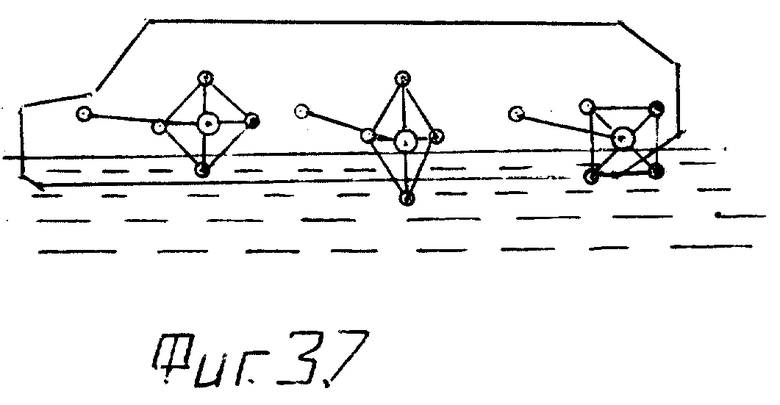
Фиг. 37 - То же, но при движении на плаву.
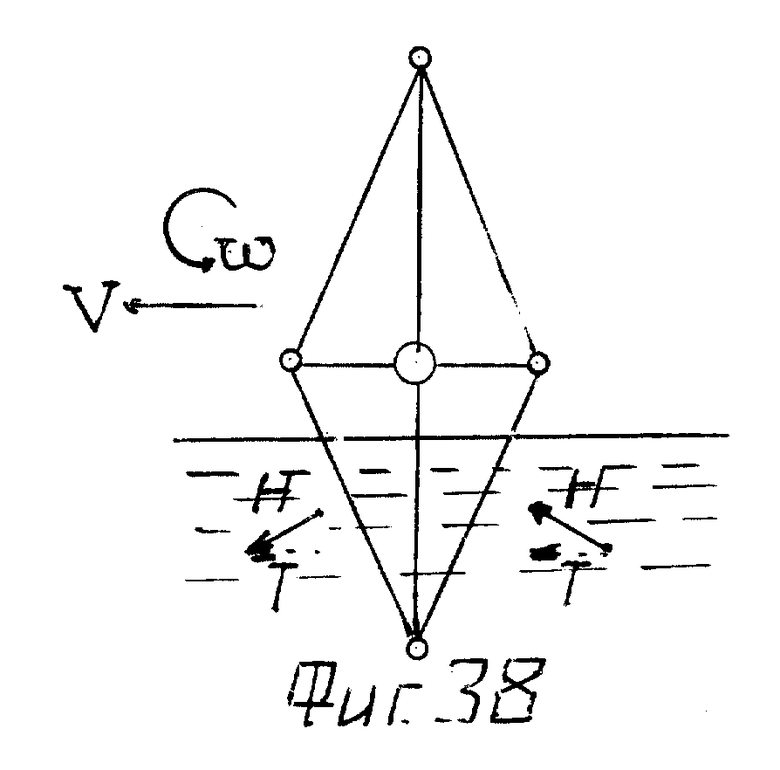
Фиг. 38 - Схема образования упорной силы в движителе на плаву в конфигурации "вертикальный ромб".
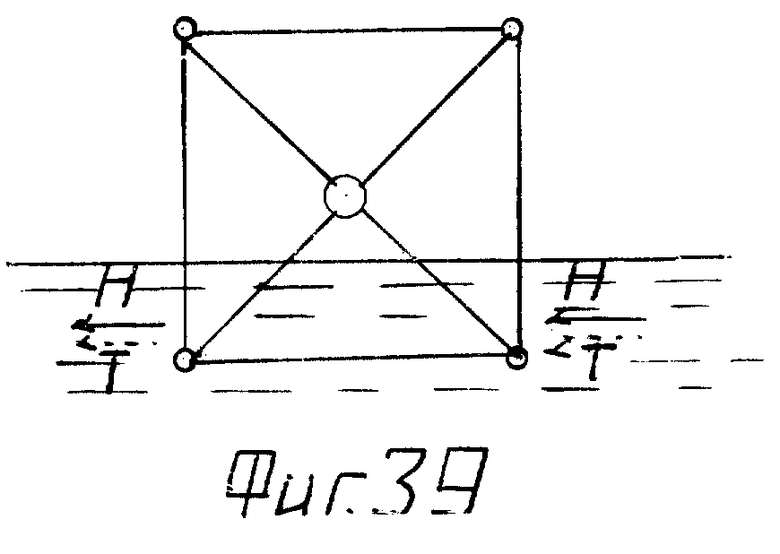
Фиг. 39 - То же, но в конфигурации "квадрат с горизонтальным основанием".
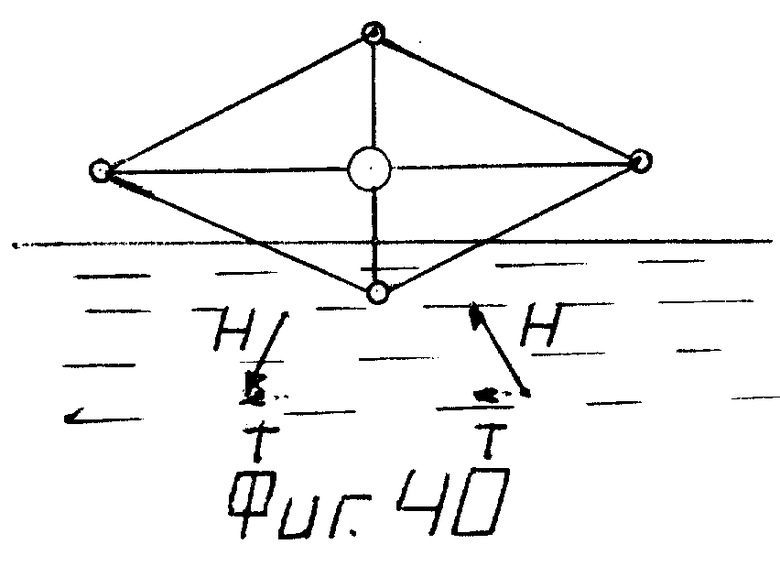
Фиг. 40 - То же, но в конфигурации "горизонтальный ромб".
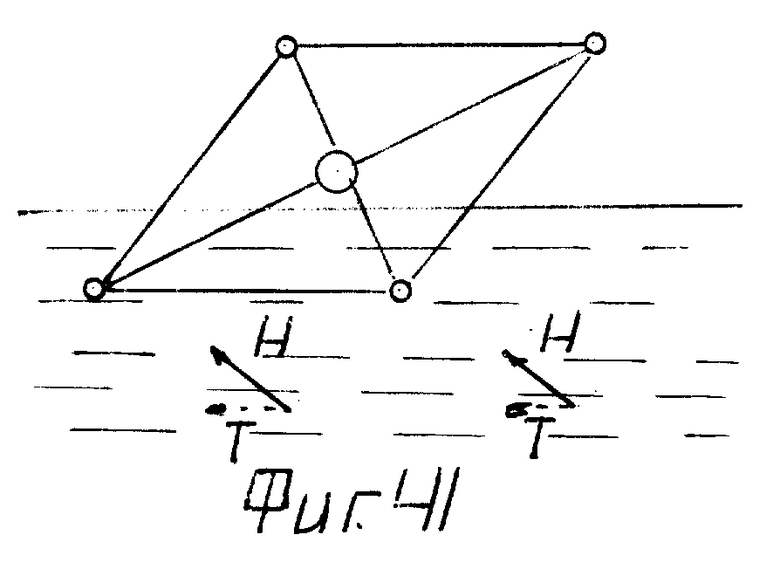
Фиг. 41 - То же, но в конфигурации "ромб с горизонтальным основанием, обращенный вправо".
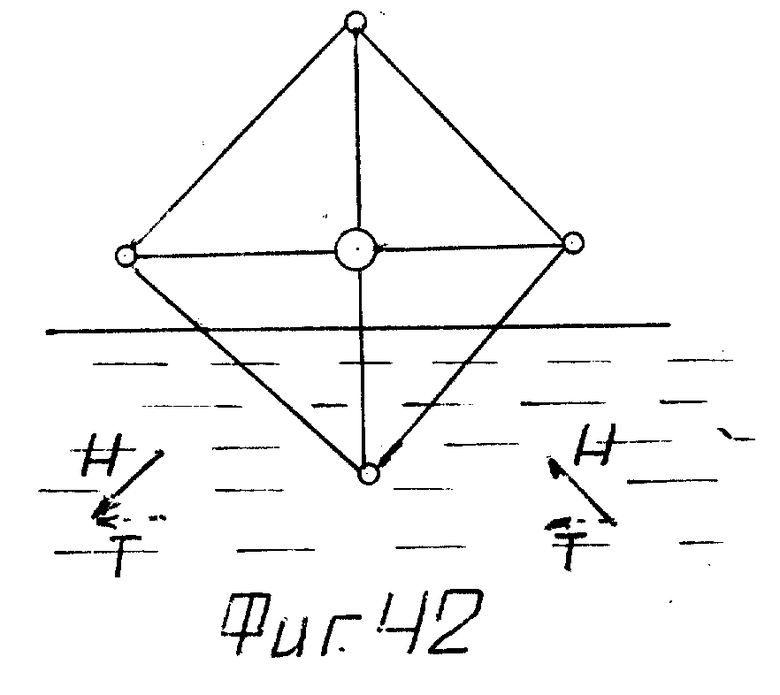
Фиг. 42 - То же, но в конфигурации "квадрат с вертикальной диагональю".
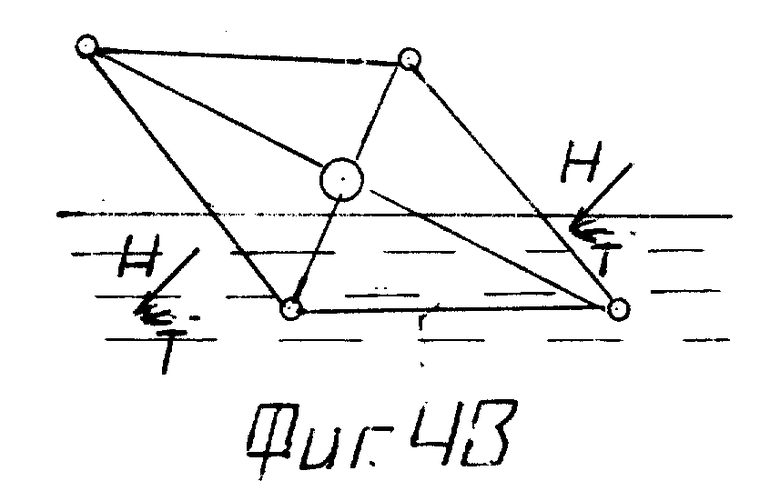
Фиг. 43 - То же, но в конфигурации "ромб с горизонтальным основанием, обращенный влево".
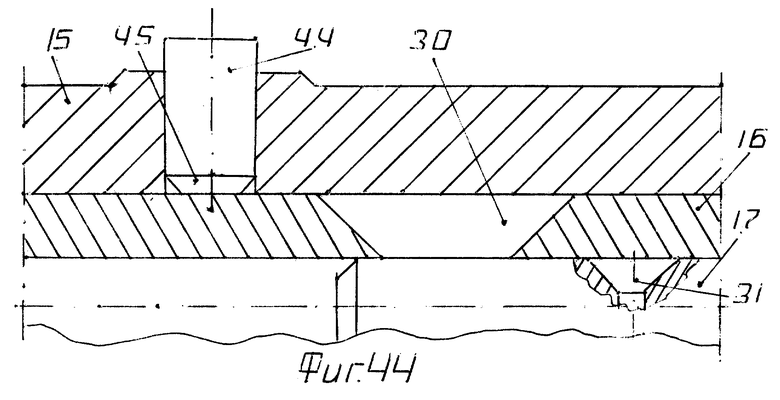
Фиг. 44 - Взаимное расположение отверстий в коленах соединительного между ступицей и обводом устройства и фиксирующего конуса при включенном фиксаторе в начальной фазе фиксирования; схема.
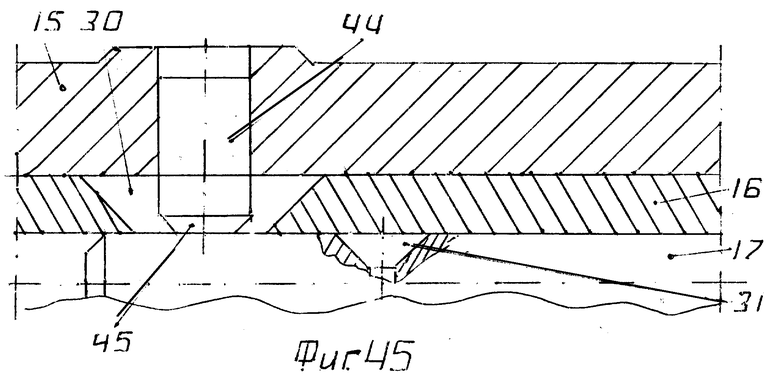
Фиг. 45 - То же, но в промежуточной фазе фиксирования.
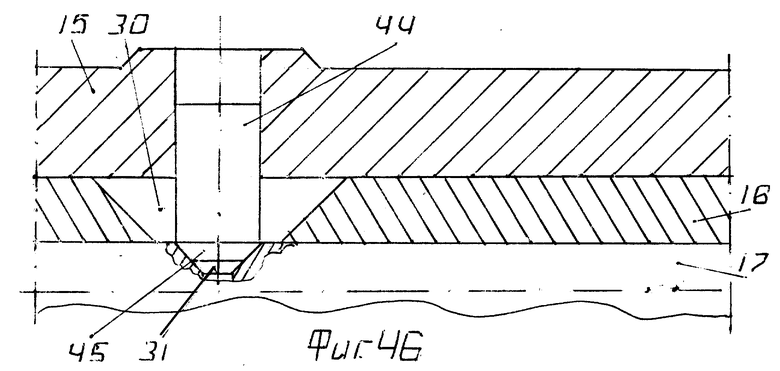
Фиг. 46 - То же, но в оконечной фазе фиксирования.
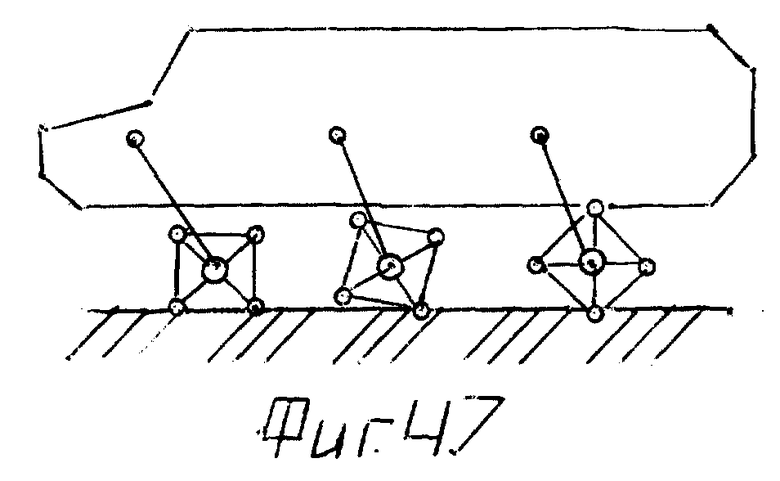
Фиг. 47 - Транспортное средство с данным движителем при движении по дороге или по песку.
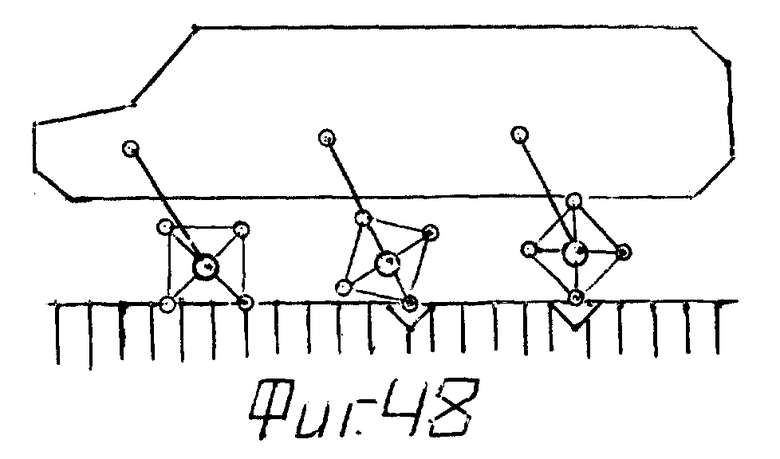
Фиг. 48 - То же, но при движении по снегу или по льду.
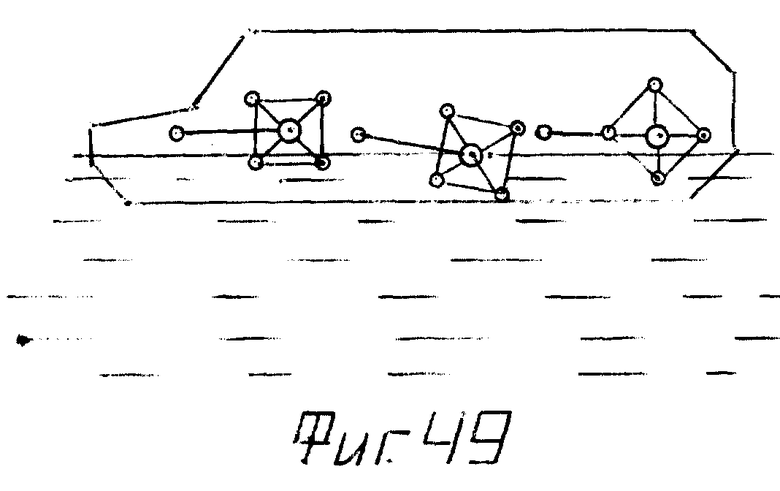
Фиг. 49 - То же, но при движении на плаву.
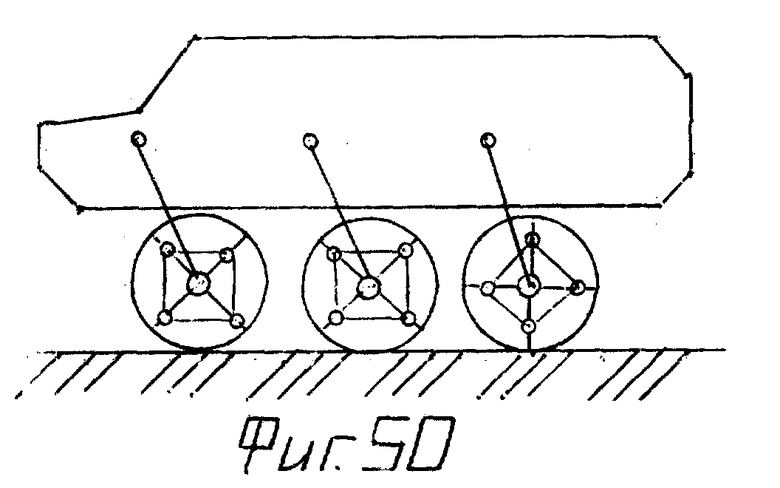
Фиг. 50 - То же, но с надетыми скругленными асфальтоходными башмаками, при движении по дороге.
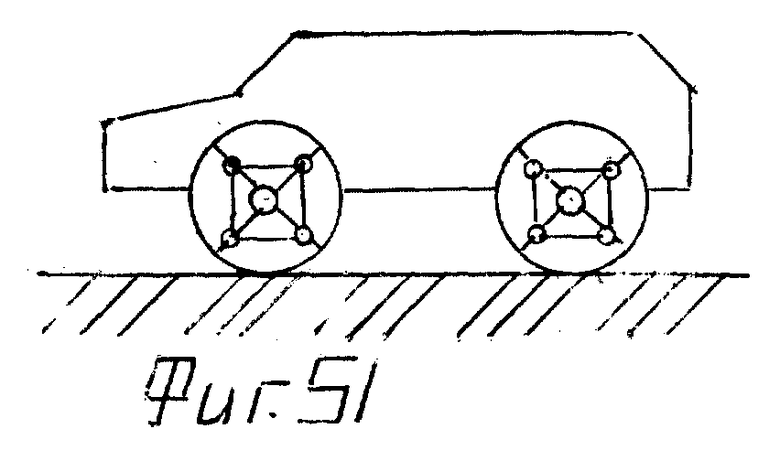
Фиг. 51 - Городской автомобиль на штатной рессорной подвеске, с движителем, зафиксированным в квадратной конфигурации и с надетыми скругленными асфальтоходными башмаками, при движении по дороге.
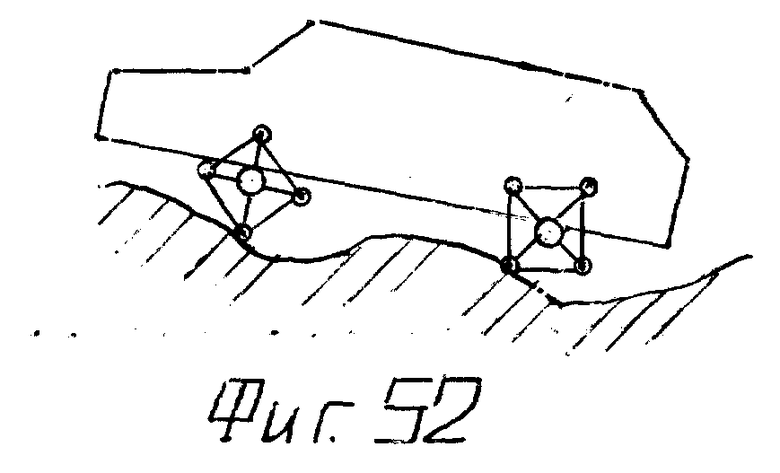
Фиг. 52 - То же, но со снятыми башмаками, при движении по пересеченной местности.
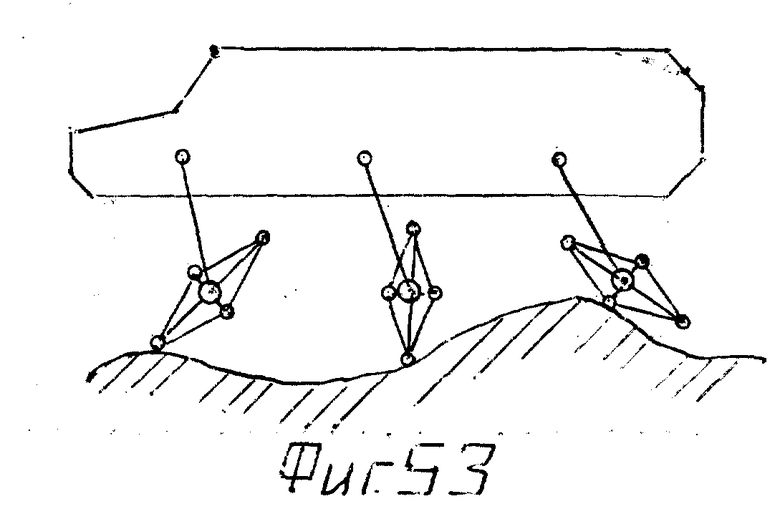
Фиг. 53 - Транспортное средство на балансирной подвеске, с движителем при включенном фиксаторе, при движении в шагающем режиме с увеличенным клиренсом по пересеченной местности.
Фиг. 54 - То же, но при движении на плаву, с образованием гребного профиля большой высоты.
Предлагаемый движитель может быть использован в разнообразных транспортных средствах, от автомобиля до обыкновенной телеги. Для кратности далее вместо термина "транспортное средство" используется термин "машина".
В примере практического осуществления данного изобретения /фиг. 1 и 2/ движитель содержит ступицу 1, гусеничный обвод в составе четырех опорных секций 2, 3, 4 и 5 и четыре соединительных между ступицей и обводом устройства прямолинейного движения 6, 7, 8, и 9, напр., телескопических /далее - телескопы/. Эти телескопы радиально расположены с равномерным угловым шагом около 90o относительно геометрической оси 10 ступицы 1 в плоскости вращения движителя /или параллельно ей/ и жестко соединены со ступицей обращенными к ней своими концами /или конструктивно с ней объединены/. Своими обращенными к гусеничному обводу концами телескопы шарнирно соединены с ним шарнирно в местах 11, 12, 13 и 14, равномерно разнесенных по его длине. Телескоп содержит колена корневое 15, промежуточное 16 и оконечное 17. Колена снабжены устройством /не показано/, напр. , скользящим шпоночным или шлицевым, для предотвращения их взаимного осевого проворачивания. На одном из колен телескопа, напр., корневом 15, расположен фиксатор 18. Корневое колено 15 телескопа жестко соединено со ступицей 1 неразъемно /напр., приварено/ или разъемно /напр., на шпильках/, либо конструктивно с ней объединено /напр., отлито ли отковано/. Каждый телескоп защищен от механических повреждений, влаги и т. п. раздвижным кожухом /напр., сильфоном/ 19, который на одном из телескопов условно не показан, чтобы не затемнять чертежа. Секции обвода снабжены шпорами /не обозначены/.
Каждое колено телескопа /фиг. 3/ выполнено в виде трубы с кольцевой отбортовкой /не обозначена/ на удаленном от ступицы 1 конце. В зоне отбортовки расположены грязесъемные и уплотнительные кольца с сальниковой гайкой /не показаны/, а также тела качения, из которых показаны только два: 20 и 21, напр. , два в плоскости вращения движителя и два в плоскости, ей перпендикулярной. Тела качения служат для уменьшения трения, что необходимо для предотвращения перекосов колен, и взаимного заедания и т.д. в контакте между смежными поверхностями колен. На обращенных к ступице концах колен расположены другие тела качения, напр., 22 и 23 аналогичного назначения. Тела качения расположены в углублениях в стенках колен. Между отбортовками колен расположены пружины сжатия 24 и 25. Пружина 25, охватывающая оконечное колено 17 телескопа, одним своим концом опирается на отбортовку на промежуточном колене 16 телескопа, а другим - на чашку /не обозначена/ на удаленном от ступицы участке этого колена. Этот участок снабжен нарезкой для гайки 26 и контргайки 27, предназначенных для регулирования положения чашки и тем самым степени предварительного поджатия пружины при эксплуатации движителя. Пружины на всех четырех телескопах имеют практически одинаковые рабочие характеристики. Длина нарезанного участка выбирается с запасом, достаточным для полного разжатия пружины, напр., на период длительного складского хранения движителя. Это участок соединен с вилкой, шарнирно связанной со смежными секциями 2 и 3 гусеничного обвода. Как показано на фиг. 4, по концам сильфона 19 расположены соосные с ним металлические патрубки 28 и 29 для надевания на отбортовки корневого и оконечного колен 15 и 17. На каждом патрубке имеется Г-образная прорезь /не обозначена/, а на отбортовках - радиальные штифты /не показаны/ для взаимодействия с ними. Прорезь и штифт образуют байонетный замок. Благодаря двум таким замкам сильфон /при необходимости доступа к телескопу для включения и выключения фиксатора/ можно отсоединить от отбортовки или чашки и сжимать его как в сторону ступицы, так и в сторону чашки.
Хотя на фиг. 1 и 3 показан телескоп в составе трех колен, их может быть меньше, т.е. два, или больше, напр., четыре, что зависит от требуемой максимальной степени сжатия гусеничного обвода. Как показано далее при вращении движителя конфигурация его обвода непрерывно изменяется в диапазоне от сжатого ромба до квадрата и далее снова до такого же ромба, но сжатого уже в направлении другой его диагонали. Степенью сжатия называется отношение длин его диагоналей в данный момент. Для квадратной конфигурации степень сжатия равна единице. Для двухколенного телескопа в случае ромбической конфигурации она отличается от единицы, но немного. При увеличении числа колен она возрастает, но ценой усложнения и утяжеления движителя. Поэтому для объяснения его работы выбран трехколенный телескоп.
Как видно из фиг. 3, в корневом колене 15 телескопа установлен фиксатор 18 /см. также фиг. 1/ для взаимодействия с отверстиями в расположенных под ним участках промежуточного колена 15 и оконечного колена 17. Этими отверстиями являются продольная прорезь 30 в колене 16 и коническое гнездо 31 в колене 17. Это гнездо расположено в точке, которая должна находиться точно под фиксатором в момент достижения телескопом заданной длины /считая от геометрической оси 10 ступицы 1 до геометрической оси соответствующего шарнира/, а прорезь - в районе над ней. Указанные прорезь и гнездо несколько ослабляют колена телескопа вследствие уменьшения рабочих сечений и концентрации напряжений. Поэтому колена должны быть изготовлены из прочной концентрационно нечувствительной стали /напр., из спокойной стали, раскисленной алюминием, или из стали вакуумной плавки/. Боковая поверхность прорези и конического гнезда должна быть подвергнута микрошлифованию, а их рабочая зона - упрочняющей обработке, напр., токами высокой частоты. По концам прорези должны быть выполнены отверстия - деконцентраторы напряжений /не показаны/.
Как это видно из фиг. 5, расположенная на оконечном колене 17 телескопа вилка 32 своими проушинами сориентирована соосно с проушинами шарнира /не обозначен/ на смежных секциях 2 и 3 гусеничного обвода и соединены с ним посредством пальца 33 со стопором от выпадания /не показан/. При этом образуется шарнирный узел, который в зависимости от конкретных условий может быть снабжен смазочным устройством или антифрикционными элементами и/или герметизирован /см. напр., а.с. СССР N 1066874, кл. МКИ B 62 D 55/20, 1981/.
Каждая опорная секция гусеничного обвода /фиг. 6/ выполнена в виде рамы 34, перекрытой опорной поверхностью 35, напр., металлическим листом, к которому прикреплены или в котором выштампованы грунтозацепы, напр., шпоры. По концам рамы предусмотрены проушины /не обозначены/. Для крепления опорного листа служат шпильки и гайки с контргайками или упругими /напр. разрезными/ шайбами. Для ускорения процесса крепления могут быть использованы быстродействующие соединительные устройства, напр., шарнирно-рычажные захваты /т. н. "лягушки"/. Рама снабжена шпильками, напр., 36.
Рама может быть не только прямолинейной, но также дугообразной /фиг. 7/, угловатой /фиг. 8/, волнообразной /фиг. 9/ и др. На одном и том же движителе могут быть одновременно закреплены рамы неодинаковых конфигураций. Но при этом длины всех рам, т.е. расстояния между геометрическими осями их шарниров, должны быть одинаковыми. Конфигурация опорных поверхностей должна соответствовать конфигурации относящихся к ним рам.
На плоской раме может быть установлен асфальтоходный башмак /фиг. 10/, содержащий несущую пластину 37 с отверстиями /не обозначены/ для шпилек 36 на раме 34 с прикрепленной к ней /напр., привулканизированной/ резиновой подушкой 38. Беговая дорожка этой подушки изогнута по требуемому радиусу качения и снабжена протекторным рисунком. Хотя здесь показан участок цилиндрической беговой дорожки, он может быть участком тороидальной беговой дорожки. Подушка может быть изготовлена не только из сплошной резины, но также из пористой, она может быть снабжена углублениями, каналами и т.п. для повышения упругости, а также может быть выполнена в виде бескамерной пневматической конструкции. Торцы подушки могут быть не плоскими, а волнообразными, с тем чтобы предотвратить случайное попадание между смежными торцами посторонних предметов. Торцы подушки наклонены к опорной пластине под углом 45o. По ее бокам предусмотрены вертикальные выемки /не обозначены/ под шпильки 36. Вместо шпилек может быть использован быстродействующий шарнирно-рычажный захват /напр., по а.с. СССР N 1152859, кл. МКИ B 62 D 52/28, 1982/.
На фиг. 13 показан предлагаемый движитель с таким асфальтоходным башмаком, превратившим его в обычное круглое колесо.
В данной заявке фиксатором именуется устройство для стопорения детали, прямолинейно движущейся относительно другой детали.
Предусмотрено использование порознь или совместно фиксаторов двух типов: для фиксирования колен телескопа в одном, заранее заданном положении /соответствующем квадратной или ромбической конфигурации гусеничного обвода с заранее заданной степенью его сжатия/ и для фиксирования колен телескопа в любом положении /и соответственно в любой конфигурации с любой степенью сжатия.
На фиг. 14 показан фиксатор первого типа. В корпусе 39 с внутренней поперечной перегородкой 40 и крышкой 41 закреплен стакан 42 с Г-образной байонетной прорезью. Внутри корпуса 39 расположен подпружиненный вытяжной стержень 43, на нижнем конце которого закреплен полый направляющий цилиндр 44 с фиксирующим конусом 45, а на верхнем - вытяжное кольцо 46. Этот стержень выполнен из двух соосных частей, соединенных посредством шарнира 47 с возможностью их взаимного осевого поворота. В верхней части этого стержня закреплен поперечный штифт 48, заведенный в указанную Г-образную прорезь. Корпус 39 ввинчен в соответствующее отверстие /не обозначено/ в стенке корневого колена 15 телескопа.
На фиг. 15 - 20 показаны различные варианты размещения фиксаторов на движителе. При этом условно изображен не весь движитель, а только его четыре корневых колена; фиксатор квадратной конфигурации обозначен значком ▪ /квадрат/, а фиксатор ромбической конфигурации - значком  /ромб/. Согласно фиг. 15 движитель снабжен одним фиксатором квадратной конфигурации, а согласно фиг. 16 - одним фиксатором ромбической конфигурации. Как было показано выше, для закрепления соответствующей конфигурации достаточно одного фиксатора. Но, как это показано на фиг. 17 и фиг. 18, на движителе лучше иметь два фиксатора одного и того же типа, расположенных на взаимно оппозитных коленах телескопа. Благодаря этому повышается надежность фиксирования и одновременно обеспечивается балансировка движителя, что особенно важно при его квадратной конфигурации с надетыми скругленными асфальтоходными башмаками при быстром движении по дороге. При необходимости в двух разнотипных фиксаторах их целесообразно разместить на взаимно оппозитных коленах движителя /фиг. 19/. Хотя надежность при этом не превышает надежности одного фиксатора, все же обеспечивается некоторая балансировка. Разность балансировочных моментов можно компенсировать путем использования балансировочных грузиков, изменением длины соответствующей продольной прорези 30 в промежуточном колене телескопа и т.д. Оптимальным является попарное размещение однотипных фиксаторов на взаимно оппозитных коленах всех четырех телескопов /фиг. 20/; при этом повышается надежность фиксирования и одновременно обеспечивается балансировка.
/ромб/. Согласно фиг. 15 движитель снабжен одним фиксатором квадратной конфигурации, а согласно фиг. 16 - одним фиксатором ромбической конфигурации. Как было показано выше, для закрепления соответствующей конфигурации достаточно одного фиксатора. Но, как это показано на фиг. 17 и фиг. 18, на движителе лучше иметь два фиксатора одного и того же типа, расположенных на взаимно оппозитных коленах телескопа. Благодаря этому повышается надежность фиксирования и одновременно обеспечивается балансировка движителя, что особенно важно при его квадратной конфигурации с надетыми скругленными асфальтоходными башмаками при быстром движении по дороге. При необходимости в двух разнотипных фиксаторах их целесообразно разместить на взаимно оппозитных коленах движителя /фиг. 19/. Хотя надежность при этом не превышает надежности одного фиксатора, все же обеспечивается некоторая балансировка. Разность балансировочных моментов можно компенсировать путем использования балансировочных грузиков, изменением длины соответствующей продольной прорези 30 в промежуточном колене телескопа и т.д. Оптимальным является попарное размещение однотипных фиксаторов на взаимно оппозитных коленах всех четырех телескопов /фиг. 20/; при этом повышается надежность фиксирования и одновременно обеспечивается балансировка.
На фиг. 21 показан телескоп с фиксатором второго вида, т.е. предназначенным для удержания движителя в любой конфигурации, т.е. для ее бесступенчатого регулирования. Отбортовка корневого колена 15 выполнена в виде плоского кольца 49 с приваренной к нему навинтованной втулкой 50. На наружной поверхности последней выполнены лыски, в результате чего она превращается в гайку 51. В зазоре между торцом корневого колена 15 телескопа и плоским кольцом 49 соосно расположены два конических затяжных кольца 52 и 53 из пружинной стали, с обращенными друг к другу коническими поверхностями, одна из которых является охватывающей, а другая охватываемой. Между плоским кольцом 49 и пружиной 24 расположено другое плоское кольцо 54 с антифрикционным покрытием /напр., фторопластовым/, условно показанным утолщенной линией. Это кольцо предназначено для предотвращения скручивания пружины 24 при закручивании гайки 51.
Фрикционный узел на отбортовке промежуточного колена 16 телескопа устроен аналогично и содержит кольцо-гайку 55 и конические кольца 56 и 57. Вдоль образующей оконечного колена 17 нанесена линейная шкала 58 для визуального взаимодействия со свободной кромкой кольца-гайки 55 /оцифровка не показана, чтобы не затемнять чертеж/, содержащая условный значок ▪ /квадрат/, соответствующий квадратной конфигурации движителя. Эта шкала позволяет наглядно судить о длине колена телескопа, а значит и о степени сжатия движителя в каждый данный момент. Условный значок ▪ позволяет быстро определить требуемую длину телескопа при задавании квадратной конфигурации, имея в виду последующее придавание ему круглой конфигурации путем надевания скругленных асфальтоходных башмаков. Ромбическую конфигурацию, как не столь критическую, можно задавать более или менее приближенно. Наиболее эффективное максимальное сжатие телескопа легко определяется визуально. Аналогичная шкала для взаимодействия со свободной кромкой кольца 54 может быть нанесена также на образующую промежуточного колена 16 телескопа /эта шкала на чертеже не показана/.
Движитель может работать как с выключенным, так и с включенным фиксатором.
При выключенном фиксаторе первого типа /фиг. 14/ его поперечный штифт 48 расположен в коротком вертикальном участке Г-образной прорези в стакане 47, препятствуя опусканию вытяжного стержня 43, а вместе с ним полого направляющего цилиндра 44 и фиксирующего конуса 45. Как видно из фиг. 14 и фиг. 22, вершина конуса при этом удалена от выходного среза корпуса фиксатора 39, а значит и от наружной поверхности промежуточного колена 16 и оконечного колена 17, не препятствуя их свободному перемещению и тем самым непрерывному изменению конфигурации движителя.
При выключенном фиксаторе второго типа /фиг. 21/ гайки 51 и 55, а также 56 и 57 полностью отпущены и не сжимают конических колец 52, 53 и 56, 57. Последние не прижаты к соответствующим коленам телескопа, не препятствуют их свободному взаимному перемещению и потому не мешают изменению конфигурации движителя. Хотя это и не показано на чертежах, на одном и том же телескопе могут быть одновременно установлены фиксаторы обоих типов: первого /западающего/ типа - для автоматического фиксирования движителя в одной, заранее заданной /напр., квадратной/ конфигурации, и второго /фрикционного/ типа - для его фиксирования в любой конфигурации.
Работа движителя при выключенном фиксаторе любого типа иллюстрируется дальнейшими фигурами, на которых телескопы для простоты условно изображены обычными прямыми линиями, без выделения колен. При работе движителя его части в процессе вращения ступицы непрерывно взаимно перемещаются, а сам он принимает множество циклически изменяющихся конфигураций, среди которых можно выделить несколько типовых.
Предположим, что в некоторый момент времени /фиг. 23/ движитель при движении по ровной твердой поверхности имеет конфигурацию "вертикальный ромб" /показано сплошной толстой линией/ и к его ступице приложена нагрузка Р. Поскольку каждый телескоп является однонаправленным, а его корневое колено 15 /фиг. 1/ жестко соединено со ступицей или конструктивно с ней объединено, то при этом к боковым вершинам 12 и 14 ромба приложены силы Q1 и Q2, причем соблюдается условие
Q1=Q2=P/2. Под действием этих двух сил нижние стороны 2 и 3 ромба отклоняются книзу, поворачиваясь /относительно точки опоры 11 на грунт/ по направлению дуговых стрелок 59 и 60, а вершины 12 и 14 описывают дуги с радиусом, равным длине секций 2 и 5. Это приводит к принудительному опусканию и удлинению горизонтальных телескопов 7 и 9. Их опускание приводит к укорачиванию нижнего телескопа 5 и сжатию его пружин. Их удлинение приводит к принудительному разжатию их пружин, опусканию вершины 13, укорачиванию верхнего телескопа 8 и сжатию его пружин. В результате ромб сплющивается по вертикали, приобретая конфигурацию "квадрат с вертикальной диагональю" /показан штриховой линией/. При дальнейшем опускании ступицы указанный процесс продолжается, движитель сплющивается все больше и в конце процесса приобретает конфигурацию "горизонтальный ромб" /показан тонкой сплошной линией/. Ромб сплющивается до тех пор, пока процесс не будет приостановлен, напр., сжатыми до предела пружинами. Максимальная допустимая степень сжатия ромба регулируется гайками на оконечных коленах телескопов, резиновыми буферами и т.д.
Приведенные в формуле изобретения термины "устройство прямолинейного движения" и "жестко прикреплены или конструктивно объединены" использованы не в идеализированном, а в чисто техническом смысле. Имеется в виду, что признаки, указанные в формуле изобретения, во взаимодействии обеспечивают принудительное перемещения боковых шарниров 12 и 14 /фиг. 23/ в стороны и вниз, а верхнего шарнира 13 - вниз, когда к ступице приложена вертикальная нагрузка. В реальном движителе ступица, соединительные устройства и шарниры могут быть расположены не на одной геометрической прямой, а на некоторой линии /напр. , ломаной/ с определенной стрелой прогиба. Допустимую величину прогиба можно задать лишь функционально. Важно, чтобы при приложении нагрузки к ступице остальные конструктивные элементы движителя вели себя в указанном выше порядке. Поэтому, если в реальном движителе геометрические центры ступицы, соединительных устройств и шарниров расположены не на одной прямой, т.е. соединительные устройства обеспечивают "примерно" прямолинейное движение, ступица соединена с ним "практически" жестко и т.д., но движитель оказывается работоспособным, то он подпадает под действие указанной формулы. То же относится и к длине опорных секций, под которой подразумевается расстояние между геометрическими осями шарниров каждой секции.
Продолжая рассмотрение работы движителя, предположим, что вращаясь по часовой стрелке, он в некоторый момент времени находится в конфигурации "наклонный ромб" /фиг. 24/, при которой его большая диагональ 11, 13 расположена не вертикально, а наклонно под некоторым углом α к дороге. При этом к ступице по-прежнему приложена нагрузка P. Силу P можно разложить на две составляющие P1 и P2 /фиг. 25/, направленные и по большой и малой диагоналям ромба. При этом в результате взаимодействия с телескопами к ступице приложены также силы трения Pт1 и Pт2, условно показанные в увеличенном масштабе. Поэтому по большой диагонали к ступице приложена разность сил P1 - Pт2, а по малой диагонали - разность сил P2 - Pт2, а по малой диагонали - разность сил P2 - Pт1. При этом P2 - Pт1 > P1 - Pт2. Разность сил P1 - Pт2 действует аналогично приложенной вертикальной силе P /фиг. 23/, вызывая сжатие ромба по направлению его большой диагонали, в результате чего он сплющивается, а его нижнее основание 3 приближается к грунту. Пружины на длинной диагонали ромба препятствуют его сжатию, а пружины на короткой его диагонали - помогают.
Одновременно с этим разность двух других сил P2 - Pт1 создает некоторый вращающий момент, поворачивающий ромб относительно опорной вершины 11 против часовой стрелки и тем самым также приближает основание 3 ромба к грунту. Таким образом, основание ромба приближается к грунту сразу по двум причинам: вследствие сжатия ромба и вследствие его поворота.
Когда основание ромба приходит в контакт с грунтом, то возникает реакция опоры, обеспечивающая сжатие ромба также и вдоль малой его диагонали. Поскольку P2-Pт1 > P1-Pт2, то сжатие по малой диагонали оказывается сильнее сжатия по большой диагонали и основание ромба прочно прижимается к грунту /фиг. 26/. При этом движитель приобретает устойчивую конфигурацию "ромб с горизонтальным основанием". Верхний острый угол ромба /при вершине 13/ обращен влево.
При дальнейшем вращении ступицы по часовой стрелке ромб под действием большей разности сил P2-Pт1 сначала остается сжатым больше по малой диагонали, чем по большой. Но по мере поворота ступицы крутизна малой диагонали уменьшается, а крутизна большой - увеличивается. Поэтому происходит перераспределение указанных сил и наступает момент, когда P2-Pт1=P1-Pт2. При этом движитель приобретает конфигурацию "квадрат с горизонтальным основанием /фиг. 27 и 28/.
При дальнейшем вращении ступицы в том же направлении происходит дальнейшее перераспределение указанных сил, в результате чего движитель снова приобретает конфигурацию "ромб с горизонтальным основанием", но уже с остроугольной вершиной, обращенной вправо /фиг. 29 и 30/.
В результате оказывается, что при фазах движения, показанных на фиг. 26 - 30, секция 3 гусеничного обвода практически не отрывается от грунта, т.е. движитель работает в гусеничном режиме. Эти фазы движения в совмещенном виде показаны на фиг. 31.
Процесс изменения конфигурации движителя зависит от величины трения в нем. Если трение сравнительно невелико, то основание ромба не отрывается от грунта. Для уменьшения трения предусмотрены соответствующие антифрикционные мероприятия: использование в телескопах тел качения, скользящих прокладок и т.п.
Если трение сравнительно велико, то основание ромба сначала несколько отрывается от грунта /сохраняя, однако, с ним контакт в опорной вершине ромба/, но затем снова по него опускается. Из сказанного следует, что конфигурация по фиг. 23 при достаточно малом трении в движителе практически не достигается и была рассмотрена только для иллюстрации принципа работы движителя. Вместо нее реально встречается конфигурация по фиг. 24, а еще чаще - по фиг. 26.
Предположим теперь, что ступица движителя, находящегося в устойчивой конфигурации "ромб с горизонтальным основанием" /фиг. 30/, продолжает вращаться по часовой стрелке. При этом вершины 12, 13 и 14 перемещаются по направлению часовой стрелки /фиг. 32/. Отдельные этапы перемещения, напр., для вершины 12 показаны дуговыми стрелками 61 и 62. Движитель перекатывается по вершине 11 тупого угла, сохраняя исходную конфигурацию "ромб", но сменяя опору с основания 3 на основание 6. При этом движитель работает в режиме некруглого колеса.
Затем он снова начинает приподниматься, опираясь уже на вершину 14 острого угла. При этом повторяется процесс, рассмотренный ранее применительно к фиг. 26,
Как при переходе через конфигурацию "квадрат с горизонтальным основанием", так и при перекатывании /фиг. 28 и 32 соответственно/ направление остроугольной, удаленной от грунта, вершины ромба меняется на обратное: если сначала она была обращена влево, то теперь обращается вправо, и наоборот.
Таким образом, рабочий цикл движителя сопровождается периодическим изменением его конфигурации. Периодически изменяется и режим его работы: с гусеничного /фиг. 26 - 30/ на некруглоколесный /фиг. 32/, затем снова на гусеничный и т.д.
Из фиг. 31 и 32 видно, что движитель с выключенным фиксатором работает в переменном колесно-гусеничном режиме. Поэтому машина с таким движителем является колесно-гусеничной. Хотя обычно так именуют машину, при необходимости переналаживаемую с колесного хода на гусеничный и обратно, в данном случае термин "колесно-гусеничная" обозначает машину, превращающуюся из колесной в гусеничную и обратно, во-первых, автоматически, и, во-вторых, непрерывно. Иными словами, здесь в старый термин вложено новое содержание.
В данном описании гусеничным обводом именуется многозвенное, замкнутое само на себя устройство переменной в процессе движения конфигурации, предназначенное для опирания движителя на грунт и взаимодействия с ним.
Основные фазы результирующего цикла работы движителя при вращении ступицы по часовой стрелке показаны на фиг. 33; при этом одна из сторон ромба условно утолщена, чтобы было легче следить за процессом движения.
На данной фигуре введены следующие упрощения:
1. Между конфигурациями "ромб с горизонтальным основанием" и "квадрат с горизонтальным основанием" опущена конфигурация "наклонный ромб", т.к. она является кратковременной, переходной и неустойчивой".
2. Для экономии площади чертежа показана только первая половина рабочего цикла. Хотя исходное /условно утолщенное/ основание и вернулось в исходное опорное положения, верхняя острая вершина ромба обращена не вправо, а влево. Вторая половина рабочего цикла, после отработки которой все элементы ромба возвращаются в исходное положение, является зеркальным отображением первой его половины.
Как видно из фиг. 26, 28, 30 и 31, изменение конфигурации движителя при вращении ступицы по часовой стрелке сопровождается ее поступательным перемещением слева направо. На фиг. 26 ступица расположена над левым концом неподвижной опорной секции, на фиг. 28 - над ее серединой, а на фиг. 30 - над правым ее концом. Из фиг. 32 также видно, что ступица перемещается слева направо. Однако в этом случае происходит смена опорных секций.
При движении по дороге /фиг. 34/ движитель работает в вышерассмотренном порядке. Для предотвращения повреждения шпорами дорожного покрытия, а также дорожного полотна, на секции гусеничного обвода надеваются плоские "асфальтоходные" башмаки, а на шарниры "асфальтоходные" чехлы.
При движении по пересеченной местности /фиг. 35/ движитель работает в основном так же, как и при движении по ровной поверхности, но уже без башмаков и чехлов. При попадании на выбоину или на выступ, обвод движителя, благодаря динамизму своей конструкции, самоустанавливается, что облегчает ему их преодоление.
При движении по слабому грунту /напр., болото, торфяник, пахота, подход к водной преграде или отход от нее/ движитель принимает по отношению к нему конфигурации, аналогичные тем, которые он принимает при движении по твердому грунту, напр. , "горизонтальный ромб", квадрат с горизонтальным основанием" или "ромб с горизонтальным основанием". Кроме того, благодаря малости сопротивления со стороны грунта, движитель может принимать конфигурацию "вертикальный ромб" или "квадрат с вертикальной диагональю".
Конфигурации "горизонтальный ромб" и квадрат с вертикальной диагональю" при достаточно большой опорной площади секций обеспечивают достаточную реакцию грунта и предотвращают чрезмерное заглубление движителя в грунт. Конфигурации "квадрат с горизонтальным основанием" и "ромб с горизонтальным основанием" при этих условиях также обеспечивают достаточную реакцию грунта и предотвращают заглубление в грунт. Наибольшие опасения относительно заглубления вызывает конфигурация "вертикальный ромб". Здесь все зависит от сочетания таких факторов, как несущая способность грунта, опорная площадь секций, их длина, характеристика грунтозацепов /их высота, конфигурация, расположения и т.п./ и т.д.
При неблагоприятном сочетании этих факторов движитель заглубляется в грунт до тех пор, пока нижняя вершина ромба не упрется в достаточно прочный его слой /который в зависимости от типа грунта находится на различной глубине/. При таком упоре "вертикальный ромб" сжимается и трансформируется в "горизонтальный ромб", что сопровождается увеличением реакции грунта. Если же нижняя вершина ромба прочного слоя не достигает, то уже через 1/4 оборота ступицы движитель, механически взаимодействуя с грунтом, приобретает очередную конфигурацию, напр., "ромб с опорой на нижнюю сторону". При этом опорная площадь обвода существенно увеличивается, благодаря чему заглубление движителя существенно уменьшается или вообще прекращается и он "выбирается наверх". В реальной машине используются несколько движителей. Маловероятно, чтобы все они одновременно находились в конфигурации "вертикальный ромб". Поэтому машина в целом в любом случае имеет достаточную проходимость.
При исходной конфигурации "квадрат с вертикальной диагональю" движитель работает как и в предыдущем случае, но в более благоприятных условиях, т.к. прямой угол больше острого, и потому исходное заглубление меньше.
Сказанное относится к грунту с весьма низкой несущей способностью. Как было доказано, движитель успешно на нем работает. При более высокой несущей способности движитель работает еще более успешно.
При движении по снегу зимой /а по тундре - и летом/ движитель обеспечивает перемещения машины за счет уплотнения снега секциями гусеничного обвода и/или сцепления шпор со снегом, либо с грунтом тундры. При этом машина имеет вид, аналогичный показанным на фиг. 34 и фиг. 35. Движение продолжается даже в том случае, если машина ложится днищем на снег или на грунт тундры /фиг. 36/.
Переход движителя с одного режима работы на другой, напр., с дороги на местность и обратно, с болотистого грунта на снег и обратно и т.д. происходит автоматически, без каких-либо переналадок в нем.
В любом из вышеуказанных сухопутных режимов движения машина управляется любым известным способом, напр., притормаживанием движителем одного борта.
Толчки при движении амортизируются пружинами движителя, а также подвеской машины.
При движении по снегу, льду или болоту /тундре/, когда машина ложится на них своим днищем, а также /как это будет показано далее/ при движении на плаву необходимо, чтобы ступица движителя располагалась несколько выше уровня днища. Для этого требуется ее приподнимать, напр., посредством подвески. Может быть использована, напр., подвеска на продольных, поворотных в вертикальной плоскости, рычагах /балансирах/, связанных с управляемым силовым приводом /напр. , гидро- или пневмоцилиндром/. Такая подвеска особенно целесообразна, если машина снабжена системой автоматического регулирования или стабилизации уровня кузова. Балансиры выполнены полыми, и внутри их расположена передача /напр. , цепная/ на движители. В случае гидро- или электропривода движителя мотор может быть расположен в его ступице. При движении на плаву /фиг. 37/ движитель работает как двухлопастное гребное колесо и может принимать указанные ранее основные конфигурации, а именно: "горизонтальный ромб", "вертикальный ромб", "квадрат с вертикальной диагональю", "квадрат с горизонтальным основанием" и "ромб с горизонтальным основанием". Как видно из фиг. 38 - 43, при вращении движителя /напр., против часовой стрелки/ с угловой скоростью ω , в любой из этих конфигураций при взаимодействии с потоком воды на погруженных в нее участках секций обвода возникает направленная влево реактивная сила H, в любой момент времени нормальная к плоскости секции. Ее горизонтальная проекция T также направлена влево и является упорной силой, обеспечивающей поступательное движение влево секции /вектор V/, ступицы, а вместе с ней и всего движителя, а значит и машины. Как видно из этих фигур, при любой из указанных конфигураций упорная сила T направлена в одну и ту же сторону /влево/. Гребная эффективность движителя существенно возрастает в случае дугообразной опорной секции или секции с гибким опорным листом. Теория работы гребного колеса - см., напр., М. Я. Алферьев, Судовые движители, "Водный транспорт", М., 1938, с. 105 и 430.
При движении на плаву машина управляется так же, как и на суше /напр., притормаживанием движителей одного борта/, но также может быть использован руль, напр., лодочного типа.
При преодолении водных преград часто встречаются /особенно в дельтах рек/ мели, перекаты и т.п. Движитель преодолевает их с ходу, не прерывая движения.
Хотя на фиг. 34, 35, 36 и 37 движители показаны в разных конфигурациях, она может находиться и в одинаковых конфигурациях.
Данный движитель не вызывает переуплотнения почвы и потому является экологически чистым.
При включенном фиксаторе первого типа /фиг. 14/ поперечный штифт 48 расположен в длинном вертикальном участке Г-образной прорези, не препятствуя опусканию стержня 43, а вместе с ним направляющего цилиндра 44 с фиксирующим конусом 45. Поэтому вершина конуса может свободно выходить из корпуса 39.
Переключение фиксатора из выключенного состояния во включенное производят путем поднятия стержня 43 посредством вытяжного кольца 46, его поворота относительно геометрической оси этого стержня и опускания в длинный вертикальный участок Г-образной прорези.
Процесс фиксирования можно условно разделить на три фазы /фиг. 44 - 46/. При этом предполагается, что ступица расположена слева, корневое колено 15 неподвижно, а колена промежуточное 16 и оконечное 17 движутся в направлении ступицы, т.е. влево.
В первой фазе /фиг. 44/ фиксирующий конус 45 под действием пружины опускается и, прижимаясь к наружной поверхности поступательно движущегося полого промежуточного колена 16, скользит по ней.
Во второй фазе /фиг. 45/ фиксирующий конус 45 соскальзывает по наклонной торцевой стенке продольной прорези 30 в промежуточном колене 16 и упирается в наружную поверхность поступательно движущегося оконечного колена 15, скользя по ней.
В третьей фазе /фиг. 46/ фиксирующий конус 45 западает в подошедшее под него коническое гнездо 31 в оконечном колене 17, фиксируя его, а вместе с ним и весь телескоп в заданном положении, а весь движитель - в заданной конфигурации.
Процесс фиксирования был рассмотрен для случая движения колен телескопа справа налево, т.е. для случая сжатия телескопа. Однако он аналогичен и при движении колен слева направо, т.е. при расширении телескопа. В любом случае некоторые фазы могут выпадать, напр., если конус фиксатора сразу же попадает в продольную прорезь 30, выпадает первая фаза. Если же конус 45, прорезь 30 и коническое отверстие 31 случайно располагаются по одной прямой, процесс фиксирования происходит однофазово.
При включенном фиксаторе движитель может быть автоматически зафиксирован /в зависимости от того, для обеспечения какой конфигурации предназначен фиксатор/ в квадратной или ромбической конфигурации. Требуемая конфигурация изначально задается соответствующим расположением на коленах телескопа фиксирующего конуса 45, продольной прорези 30 и конического отверстия 31.
Квадратная конфигурация предназначается, напр., для движения по песку, преодоления ям и/или движения с надетыми скругленными асфальтоходными башмаками.
Квадратная конфигурация может быть зафиксирована как на стоянке, так и в движении.
При фиксировании на стоянке используется то обстоятельство, что пружины на всех телескопах должны быть затянуты с таким расчетом, чтобы создавать практически одинаковое усилие. Тогда при отделении движителя от грунта, напр. , путем приподнимания несущего его балансира, пружины автоматически растягивают обвод до квадратной конфигурации, а фиксатор, действуя как защелка, автоматически стопорит телескоп, удерживая весь обвод в квадратной конфигурации. Если фиксирования не происходит, то достаточно подтянуть /или ослабить/ соответствующую пружину с помощью гайки 26 на оконечном колене соответствующего телескопа, напр., посредством динамометрического ключа. Для отделения движителя от грунта можно также подкопать грунт под движителем или поставить машину с таким расчетом, чтобы фиксируемый движитель оказался над глубокой выемкой в грунте.
При фиксировании в движении поступают так. Если места на дороге достаточно, то двигают машину вперед /или назад/ до тех пор, пока движитель не придет в очередной раз в квадратную конфигурацию, а фиксатор автоматически не сработает. Если же места недостаточно, то маневрируют машиной вперед-назад, пока не произойдет то же самое. В обоих случаях фиксаторы можно подготовить к работе одновременно на нескольких или на всех движителях машины, и тогда они автоматически зафиксируются по мере их прихода в квадратную конфигурацию.
Перед подготовкой движителя к фиксированию доступ к фиксатору открывают, повернув манжеты 28 и/или 29 сильфона 19 /фиг. 4/, сняв его /их со штифта/штифтов и подняв /опустив сильфон. По окончании фиксирования сильфон возвращают на место в обратном порядке.
Ромбическая конфигурация предназначается, напр., для увеличения клиренса при движении на суше и/или для увеличения упорного давления, создаваемого движителем при движении на плаву.
Ромбическая конфигурация может быть зафиксирована как на стоянке, так и в движении.
При фиксировании на стоянке движитель прижимают к грунту, напр., опустив несущий его балансир /напр., с помощью гидроцилиндра/ или смещая перевозимый груз в район над движителем.
При фиксировании в движении поступают так. Если места на дороге достаточно, то машину двигают вперед /или назад/, пока движитель не придет в очередной раз в ромбическую конфигурацию, а фиксатор автоматически не сработает. Если же места недостаточно, то маневрируют машиной вперед-назад, пока не произойдет то же самое. В обоих случаях фиксаторы можно подготовить к работе одновременно на всех или нескольких движителях машины, и тогда они автоматически зафиксируются по мере их прихода в ромбическую конфигурацию. При этом сильфоны поднимают /опускают/ как и в предыдущем случае /подготовки к фиксированию в квадратной конфигурации/.
Как это было показано выше /при рассмотрении работы движителя применительно к фиг. 23/, сжатие нижней /верхней половины ромба или квадрата автоматически сопровождается сжатием верхней /нижней/ его половины. При этом фиксирование одного из его телескопов, напр., нижнего, автоматически сопровождается фиксированием оппозитного /верхнего/ телескопа, а значит и всего гусеничного обвода. Поэтому для фиксирования всего движителя достаточно лишь одного фиксатора.
Фиксатор второго типа /фиг. 21/ может быть включен только вручную и только на стоянке, в тот момент, когда движитель примет требуемую конфигурацию, которую ему придают в вышерассмотренном порядке. Перед приданием движителю требуемой конфигурации его расфиксируют, отпуская гайки 51 и 55. При этом конические кольца 52, 53 и 56, 57 разжимаются, высвобождая соответствующие колена телескопа. После придания движителю требуемой конфигурации эти гайки снова затягивают, фиксируя эти колена, а значит и весь движитель.
В данном описании движитель встроен в соединительное между ступицей и гусеничным обводом устройство. Но он может быть расположен и вне его. Поэтому формула изобретения относится к фиксатору любой конструкции и с любым месторасположением относительно соединительного устройства.
На фиг. 47 схематически показан вездеход с предлагаемым движителем, снабженным фиксатором любого типа, удерживающим обвод в квадратной конфигурации, при движении по дороге или по песку. Благодаря подвеске, напр., активной, обеспечивается достаточная плавность хода. Может быть использована, напр. , подвеска, специально предназначенная для некруглых колес /напр., авт. свид. СССР N 1034827, МКИ B 60 C 3/02, 1980/. На фиг. 48 показан он же, но при движении по снегу или по льду. На фиг. 49 показан он же, но при движении на плаву. На фиг. 50 показан он же, но с надетыми скругленными асфальтоходными башмаками, при движении по дороге с большой скоростью.
На фиг. 51 схематически показан городской автомобиль на штатной рессорной подвеске, с движителем в квадратной конфигурации и с надетыми скругленными асфальтоходными башмаками, при движении по дороге с большой скоростью. На фиг. 52 показан он же, но со снятыми башмаками, при движении по пересеченной местности. Это может быть городской автомобиль, лишь изредка выезжающий за город/отдых, рыбалка, охота и т.д./ и потому не часто встречающийся с трудно проходимыми участками местности. При этом некоторое ухудшение плавности хода компенсируется самой возможностью преодоления таких участков.
На фиг. 53 показан вездеход на балансирной подвеске, с предлагаемым движителем, с включенным фиксатором, при движении /в шагающем режиме с увеличенным клиренсом/ по местности. Поскольку места контакта движителей с грунтом отстоят достаточно далеко друг от друга, они /в отличие от гусеничного движителя/ не образуют в нем непрерывных углублений, но создают эрозии почвы и потому являются экологически чистыми. На фиг. 54 показан он же, но при движении на плаву. Из чертежа ясно видно, что движитель обладает гребным профилем достаточно большой высоты и потому создает высокое упорное давление.
Управление машиной в любом из указанных режимов, как при включенных, так и при выключенных фиксаторах, производится притормаживанием /или ускорением/ движителей одного борта.
Движители, установленные на одной и той же машине, могут быть как зафиксированы, так и расфиксированы в самых разнообразных сочетаниях, что позволяет приспосабливать ее к различным дорожным условиям. Если все движители расфиксированы, то машина является колесно-гусеничной /в том смысле, что движители периодически и автоматически переходят с колесного режима на гусеничный и обратно/. Если все движители зафиксированы /в различных или одинаковых/ некруглых конфигурациях, то машина является чисто шагающей. Если часть движителей зафиксирована, а часть расфиксирована, то машина является колесно-гусенично-шагающей. Если все движители зафиксированы в квадратной конфигурации и снабжены скругленными асфальтоходными башмаками, то машина становится чисто колесной.
Как видим, предлагаемый движитель экологически чист, легок, прост по конструкции и может работать практически в любом режиме, обеспечивая высокие скорость, опорно-сцепную и профильную проходимость, клиренс и гребную эффективность, а оборудованная им машина является практически универсальным вездеходом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1987 |
|
RU2031039C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2190552C2 |
| КОЛЕСО С ИЗМЕНЯЕМОЙ КОНФИГУРАЦИЕЙ ОБВОДА | 2004 |
|
RU2268823C1 |
| КОЛЕСО С ИЗМЕНЯЕМОЙ КОНФИГУРАЦИЕЙ ОБВОДА | 1999 |
|
RU2152880C1 |
| Колесо с изменяемой конфигурацией обвода | 1982 |
|
SU1088955A1 |
| АСФАЛЬТОХОДНАЯ ГУСЕНИЦА ТРАНСПОРТНОГО СРЕДСТВА С ПАРАЛЛЕЛЬНЫМ РЕЗИНОМЕТАЛЛИЧЕСКИМ ШАРНИРОМ | 2009 |
|
RU2400390C1 |
| СПОСОБ ОБКАТКИ ГУСЕНИЧНЫХ ЛЕНТ НА СТЕНДЕ (ВАРИАНТЫ) | 2010 |
|
RU2423681C1 |
| БЕЗШАРНИРНАЯ ГУСЕНИЧНАЯ ЦЕПЬ ДЛЯ ПОВЫШЕНИЯ ПРОХОДИМОСТИ КОЛЁСНЫХ МАШИН МНОГОЦЕЛЕВОГО НАЗНАЧЕНИЯ И СЕЛЬСКОХОЗЯЙСТВЕННЫХ ТРАКТОРОВ | 2010 |
|
RU2540217C2 |
| УШИРЕННАЯ ГУСЕНИЦА С ПАРАЛЛЕЛЬНЫМ РЕЗИНОМЕТАЛЛИЧЕСКИМ ШАРНИРОМ (ВАРИАНТЫ) | 2004 |
|
RU2278052C2 |
| ДВИЖИТЕЛЬ - БЕСШАРНИРНАЯ ГУСЕНИЧНАЯ ЦЕПЬ С ТРАКАМИ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2440267C1 |
Движитель содержит ступицу, гусеничный обвод в виде четырех шарнирами соединенных между собой опорных секций одинаковой длины и четыре радиальных соединительных устройства между ступицей и обводом для осуществления прямолинейного движения. Устройства расположены в плоскости вращения движителя или в параллельной ей плоскости. Устройства обращенными к ступице концами жестко соединены или конструктивно объединены со ступицей. Устройства обращенными к обводу концами соединены с обводом по шарнирам. По меньшей мере одно указанное соединительное устройство снабжено по меньшей мере одним фиксатором. Изобретение направлено на повышение проходимости транспортного средства. 54 ил.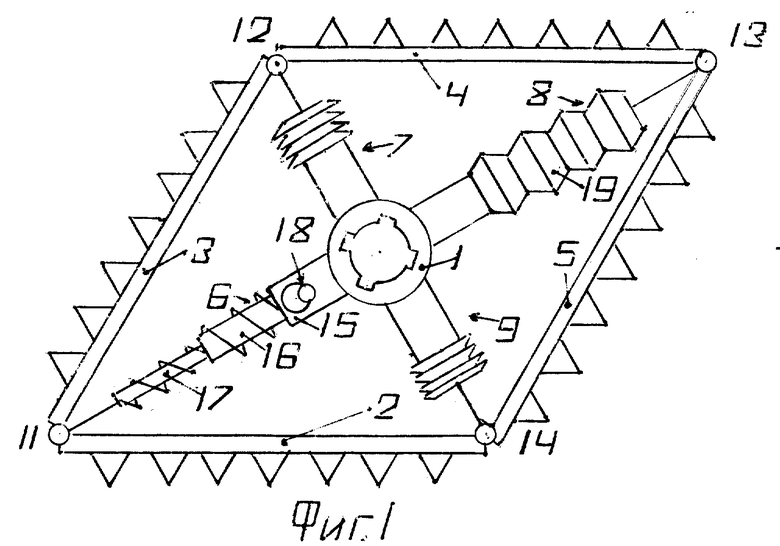
Движитель транспортного средства, содержащий ступицу, гусеничный обвод, выполненный в виде четырех шарнирами соединенных между собой опорных секций с одинаковым расстоянием между геометрическими осями шарниров каждой их них, и четыре радиально ориентированные устройства прямолинейного движения в виде взаимно перемещаемых частей, расположенных между ступицей и гусеничным обводом в плоскости вращения движителя или в параллельной ей плоскости с равным угловым шагом относительно ее геометрической оси, каждое из которых одним своим концом жестко с ней соединено или конструктивно с ней объединено, а другим своим концом соединено с шарниром гусеничного обвода, отличающийся тем, что по меньшей мере одно устройство прямолинейного движения снабжено по меньшей мере одним фиксатором взаимного перемещения частей этого устройства.
| RU, 2031039 C1, 20.03.95. |
