Изобретение относится к области транспорта, преимущественно к движителям транспортных средств, и может быть использовано в транспортных средствах высокой проходимости - в вездеходах, снегоходах и болотоходах, в сельскохозяйственных машинах, в строительно-дорожных машинах и т.д., а также в амфибиях. Кроме того, оно может быть использовано для быстрого преобразования транспортных средств нормальной проходимости (преимущественно содержащих активную подвеску) в транспортные средства повышенной и даже высокой проходимости, а при наличии водоизмещающего корпуса или поплавков - также и амфибии.
Известен движитель транспортного средства (пат. Франции N 713978, кл. 1, гр. 10, опублик. 1931), содержащий обод из четного количества шарнирно соединенных между собой опорных секций с одинаковым расстоянием между геометрическими осями шарниров каждой из них (далее условно-гусеничный обвод), ступицу и четное количество соединительных между ними устройств прямолинейного движения, расположенных с равномерным угловым шагом относительно геометрической оси ступицы в плоскости вращения движителя или в параллельной ей плоскости, и своими обращенными к ободу концами шарнирно соединенных с ним в местах, равномерно разнесенных по его длине. Эти соединительные устройства соединены шарнирно как с обводом, так и со ступицей, и поэтому не могут нести вертикальной нагрузки, хотя и передают со ступицы на обвод крутящий момент, обеспечивающий его движение. Поэтому внутри гусеничного обвода соосно ступице расположено прикрепленное к соединительным устройствам зубчатое опорное колесо, которое перекатывается по нижней ветви обвода, сцепляясь с ним зубцами. Одновременно оно воспринимает вертикальную нагрузку.
Недостатки данного движителя: недостаточная опорно-сцепная проходимость из-за относительно небольшой величины пятна контакта; плохие гребные свойства из-за малой высоты гребного профиля; чрезмерные масса и металлоемкость из-за наличия опорного колеса и большого (20) числа соединительных устройств; сложность конструкции из-за наличия зубьев на опорном колесе и шарниров на ступице.
Наиболее близким по технической сущности и по достигаемому результату (прототип) является движитель транспортного средства, который содержит гусеничный обвод, ступицу и четное число соединительных устройств прямолинейного движения, расположенных в плоскости вращения движителя или в параллельной ей плоскости и своими обращенными к ступице концами соединенных с ней в местах, расположенных с равным угловым шагом относительно ее геометрической оси, а обращенными к ободу концами шарнирно соединенных с ним в местах, равномерно разнесенных по его длине. Обращенные к ступице концы соединительных устройств шарнирно соединены с ней и одновременно могут перемещаться по имеющимся в ней прорезям. Хотя этот движитель по конструкции проще предыдущего (например в нем зубчатое колесо заменено диском с гладкой периферией), все же в нем сохранились остальные ранее указанные недостатки.
Цель изобретения - разработка движителя с повышенной опорно-сцепной проходимостью, с улучшенными гребными свойствами, с уменьшенными массой и материалоемкостью, с простой конструкцией.
Для достижения цели изобретения в движителе транспортного средства, содержащем гусеничный обвод, ступицу и четное количество соединительных между ними устройств прямолинейного движения, расположенных в плоскости вращения движителя или в параллельной ей плоскости, и своими обращенными к ступице концами соединенных с ней в местах, расположенных с равным угловым шагом относительно ее геометрической оси, а обращенными к обводу концами шарнирно, соединенными с ним в местах, равномерно разнесенных по его длине, размещены четыре или шесть соединительных устройств указанного типа. Эти устройства расположены радиально и обращенными к ступице концами жестко с ней соединены или конструктивно с ней объединены. Благодаря такому прикреплению или объединению узел ступица - соединительные устройства становится самонесущим, что позволяет отказаться от диска и уменьшить радиальный размер ступицы. Диск теперь не препятствует сжатию обвода в вертикальном направлении. Опускаясь под действием нагрузки, ступица вызывает принудительное опускание соединительных устройств, а значит и сжатие обвода по высоте. В результате значительная часть нижней половины обвода приближается к грунту, благодаря чему увеличивается отношение длины контакта к периметру обвода и тем самым повышается опорно-сцепная проходимость движителя. При этом движитель работает в гусеничном режиме.
В отличие от обычного гусеничного обвода, конфигурация которого в процессе движения остается теоретически неизменной, в данном движителе конфигурация гусеничного обвода периодически изменяется. Например, при четырех соединительных устройствах возможны конфигурации вертикальный ромб, наклонный ромб, квадрат и др. Пpи шести соединительных устройствах возможны конфигурации правильный треугольник с обращенным книзу основанием, правильный шестиугольник с обращенным книзу основанием и др. При любой конфигурации гусеничного обвода геометрический центр ступицы движителя равноудален от сторон соответствующей геометрической фигуры.
Отношение длины контакта к периметру гусеничного обвода может составить 0,25-0,5 в случае четырех соединительных устройств и 0,17-0,33 в случае шести соединительных устройств. Это больше, чем 0,15 у прототипа.
Приведенное выше выражение "... своими обращенными к ступице концами эти (соединительные) устройства жестко к ней (ступице) прикреплены или конструктивно с ней объединены. . ." означает, что узел такого прикрепления (объединения) выполнен таким образом, что поступательное, например вертикальное, перемещение ступицы под действием приложенной к ней нагрузки приводит к принудительному опусканию шарниров обвода и изменению его конфигурации.
При сжатии обвода высота его гребного профиля увеличивается, что приводит к улучшению его гребных свойств. При этом движитель работает в гребном режиме.
Движитель становится самонесущим и необходимость в диске отпадает. Кроме того, уменьшается (с 20 до 4 или 6) число соединительных устройств и секций гусеничного обода.
Жесткое соединение по конструкции всегда проще подвижного, в том числе шарнирного.
Указанные отличия обеспечивают достижение заявленного положительного эффекта. Эти отличия, кроме того, существенны.
Сущность отличий подтверждается также тем, что из отличительных признаков "количество соединительных между гусеничным ободом и ступицей устройств равно четырем или шести" и "соединительные устройства расположены радиально и своими обращенными к ступице концами жестко к ней присоединены или конструктивно с ней объединены" логически никак не следует свойство совокупности: увеличение отношения длины пятна контакта к периметру гусеничного обвода. Это свойство появляется только в результате взаимодействия признаков ограничительной и отличительной частей формулы изобретения.
Движитель может работать в гусеничном и гребном режимах и поэтому обеспечивает движение транспортного средства как на суше, так и на воде. Обеспечивается движение как по дорогам, так и без дорог (например, по слабым грунтам и по пересеченной местности), а также преодоление водных преград (как на плаву, так и вброд, включая подход к ним, форсирование и выход из них).
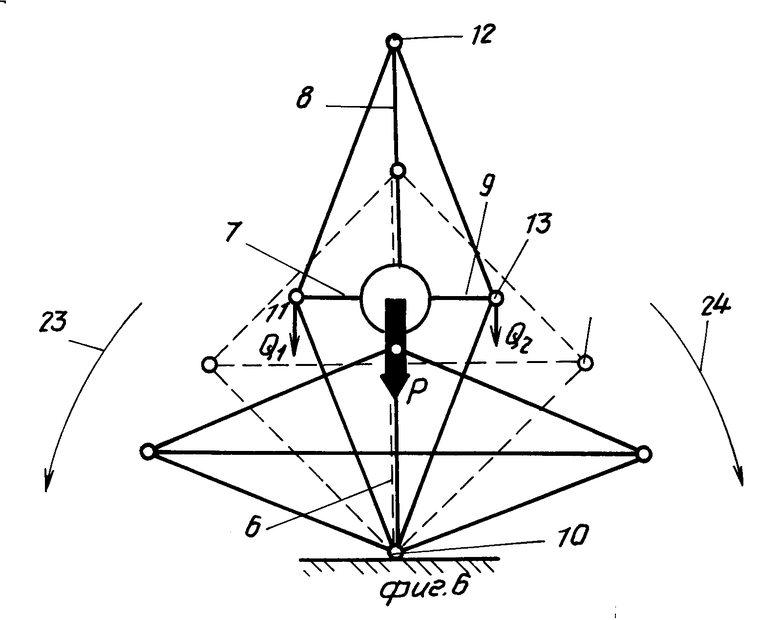
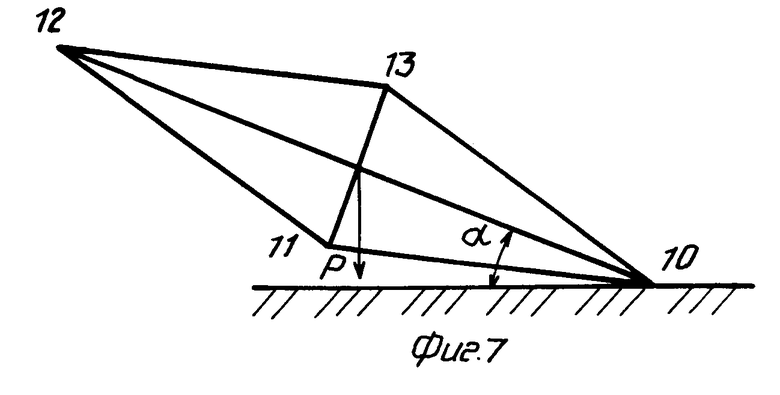
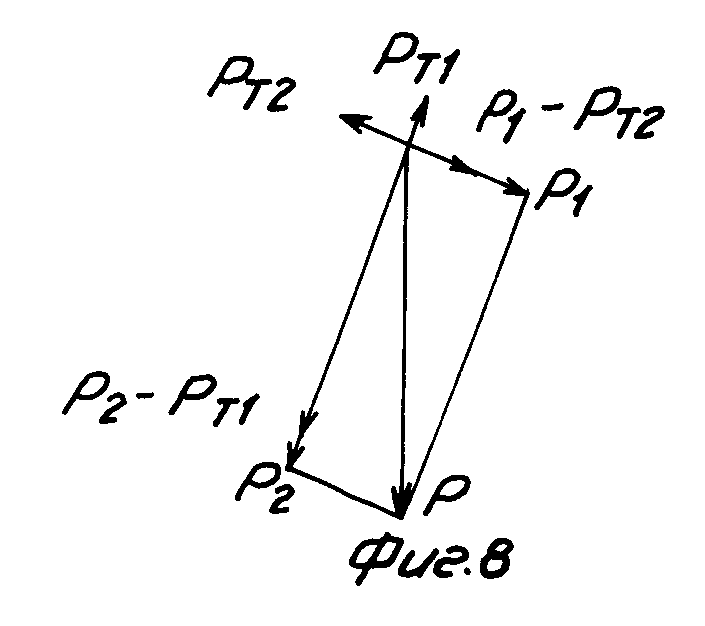
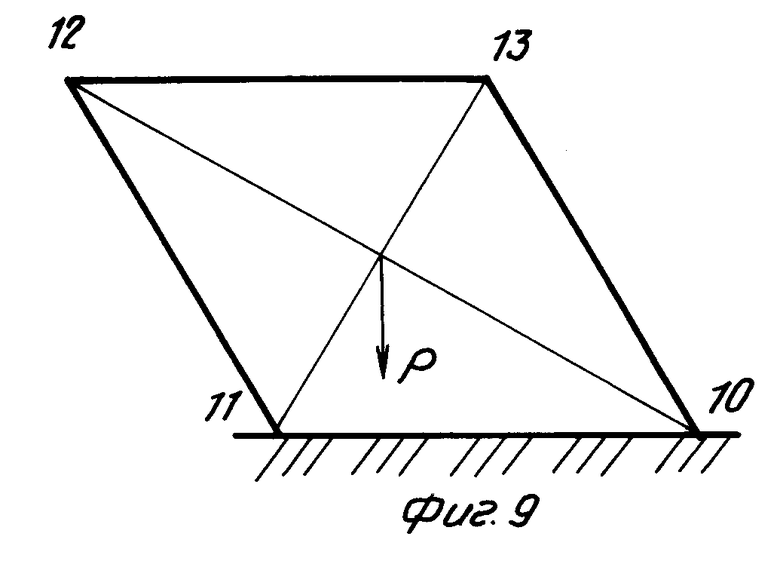
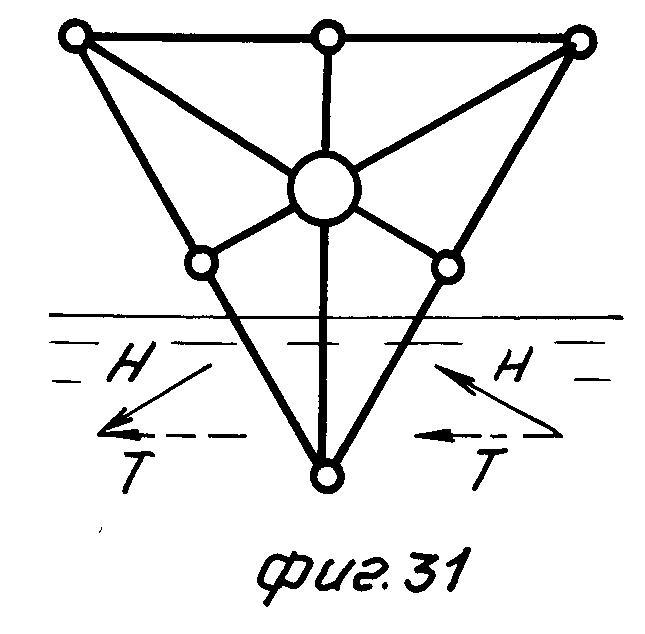
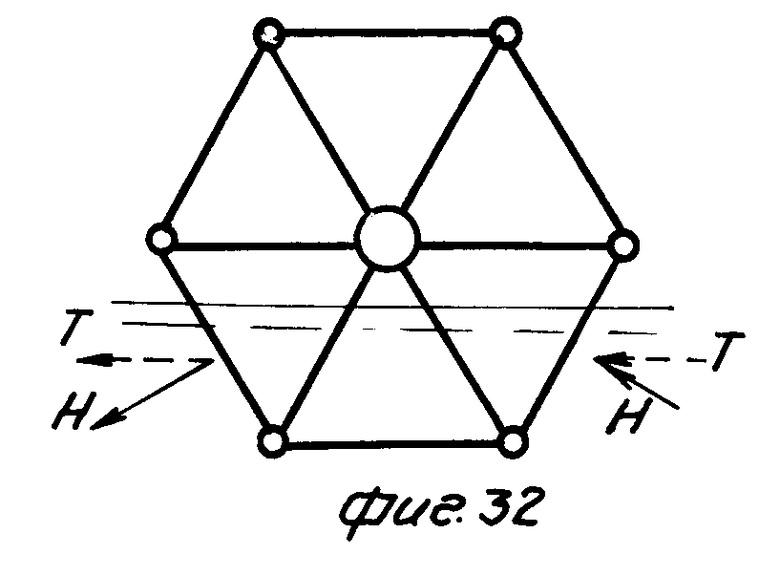
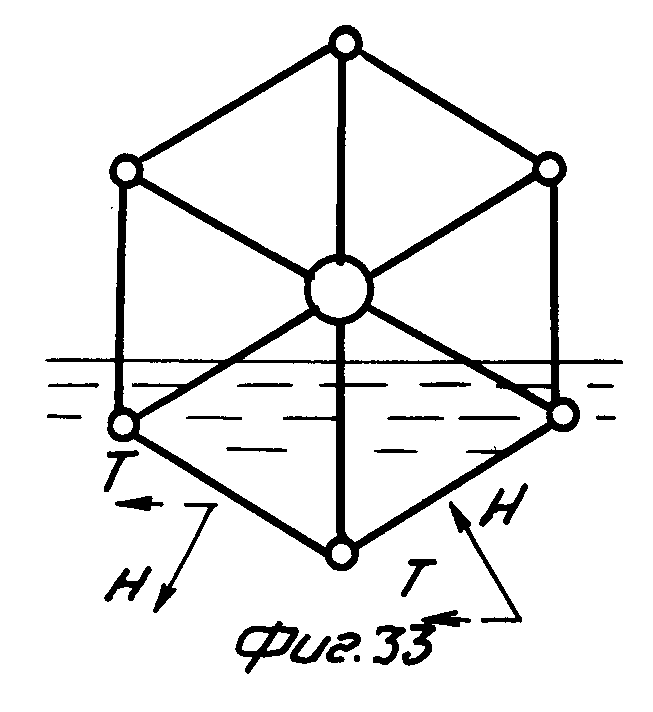
На фиг. 1 показан движитель, первый вариант, общий вид; на фиг. 2 - соединительное устройство между ступицей и гусеничным обводом, разрез; на фиг. 3 - узел шарнирного соединения конечной части соединительного устройства со смежными секциями гусеничного обвода, общий вид; на фиг. 4 - секция гусеничного обвода с плоской опорной поверхностью; на фиг. 5 - то же, с вогнутой опорной поверхностью; на фиг. 6 - система сил, действующих на движитель при нахождении его в исходной конфигурации "вертикальный ромб"; на фиг. 7 - движитель в конфигурации "наклонный ромб"; на фиг. 8 - система сил, действующих на движитель в конфигурации "наклонный ромб"; на фиг. 9 - движитель в конфигурации "ромб с горизонтальным основанием, обращенный влево"; на фиг. 10 - система сил, действующих на движитель в конфигурации "ромб с горизонтальным основанием, обращенный влево"; на фиг. 11 - движитель в конфигурации "квадрат с горизонтальным основанием"; на фиг. 12 - система сил, действующих на движитель в конфигурации "квадрат с горизонтальным основанием на фиг. 12 - система сил, действующих на движитель в конфигурации "квадрат с горизонтальным основанием"; на фиг. 13 - движитель в конфигурации "ромб с горизонтальным основанием, обращенный вправо; на фиг. 14 - система сил, действующих на движитель в конфигурации "ромб с горизонтальным основанием, обращенный вправо"; на фиг. 15 - основание фазы перекатывания движителя в конфигурации "ромб"; на фиг. 16 - основные фазы рабочего цикла движителя на суше; на фиг. 17 - транспортное средство с предлагаемым движителем при движении по дороге; на фиг. 18 - то же, при движении по пересеченной местности; на фиг. 19 - то же, при движении по снегу; на фиг. 20 - то же, при движении на плаву; на фиг. 21 - схема образования упорной силы в движителе на плаву, в конфигурации "вертикальный ромб"; на фиг. 22 - то же, в конфигурации "горизонтальный ромб"; на фиг. 23 - то же, в конфигурации "квадрат с вертикальной диагональю"; на фиг. 24 - то же, в конфигурации "квадрат с горизонтальным основанием"; на фиг. 25 - то же, в конфигурации "ромб с горизонтальным основанием", обращенный вправо"; на фиг. 26 - то же, но в конструкции "ромб с горизонтальным основанием, обращенный влево"; на фиг. 27 - движитель, второй вариант, общий вид; на фиг. 28 - система сил, действующих на движитель при нахождении его в исходной конфигурации "вертикально расположенный правильный треугольник с опорой на вершину"; на фиг. 29 - основные фазы рабочего цикла движителя на суше; на фиг. 30 - схема образования упорной силы в движителе на плаву, в конфигурации "правильный треугольник с обращенным книзу основанием"; на фиг. 31 - то же, в конфигурации "правильный треугольник с обращенной книзу вершиной"; на фиг. 32 - то же, в конфигурации "правильный шестиугольник с обращенным книзу основанием"; на фиг. 33 - то же, в конфигурации "правильный шестиугольник с обращенной книзу вершиной".
Предложенный движитель может быть использован в разнообразных транспортных средствах, от автомобиля до обыкновенной телеги. Для краткости далее вместо термина "транспортное средство" используется термин "машина".
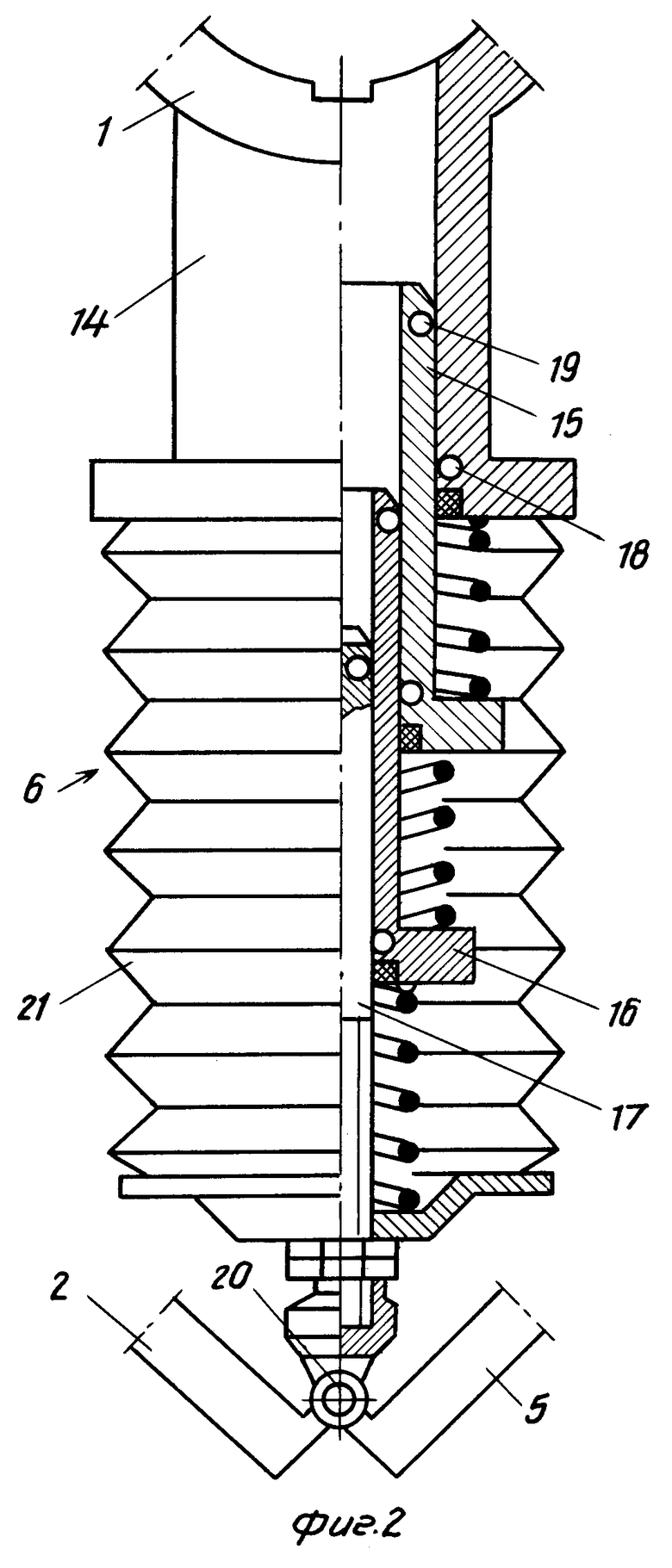
В первом примере практического исполнения изобретения (фиг. 1) движитель содержит ступицу 1, гусеничный обвод в составе четырех секций 2, 3, 4 и 5 и четыре соединительные между ступицей и обводом устройства прямолинейного движения (например телескопические) 6, 7, 8 и 9 (далее - телескопы). Эти телескопы радиально расположены с равномерным угловым шагом (около 90о) относительно геометрической оси (не показана) ступицы 1 в плоскости вращения движителя (или параллельной ей) и жестко соединены со ступицей обращенными к ней своими концами (или конструктивно с ней объединены). Своими обращенными к гусеничному обводу концами телескопы шарнирно соединены с ним в местах 10, 11, 12 и 13, равномерно разнесенных по его длине. Телескоп содержит колена: корневое 14, промежуточные 15 и 16, а также оконечное 17. Корневое колено 14 телескопа жестко соединено со ступицей 1 неразъемно (например приварено) или разъемно (например закреплено на шпильках), либо конструктивно с ней объединено (отлито, отковано и т.д.).
Каждое колено телескопа (фиг. 2) выполнено в виде трубы с отбортовкой на удаленном от ступицы 1 конца. В зоне отбортовки расположены грязесъемные и уплотнительные кольца с сальниковой гайкой, а также тела качения 18, например два, в плоскости движителя и два в плоскости, ей перпендикулярной. Тела качения служат для уменьшения трения, что необходимо для предотвращения перекосов, заедания и т.п. в контакте между смежными поверхностями колен. На обращенных к ступице концах в колене расположены другие тела качения 19 аналогичного назначения. Тела качения расположены в углублениях в стенках колен. Между отбортовками колен могут быть расположены пружины сжатия или снабженные реверсорами пружины растяжения, а внутри пружин - буфера сжатия (не показаны), например резиновые. По меньшей мере один из буферов может быть выполнен в виде резинового полого тела, работающего на срез (что необходимо для восприятия высокочастотных колебаний).
Пружина, охватывающая оконечное колено 17 телескопа, одним своим концом упирается в отбортовку на промежуточном колене 16 телескопа, другим опирается на чашку на удаленном от ступицы участке этого колена. Этот участок снабжен нарезкой, на которую посажены гайка и контргайка для регулирования положения чашки и степени предварительного поджатия пружины при эксплуатации движителя. Длина нарезанного участка выбирается с запасом, достаточным для полного разжатия пружины, например, на период хранения движителя на складе. Этот участок связан с вилкой 20, которая шарнирно соединена со смежными секциями 2 и 5 гусеничного обвода. Снаружи телескоп охвачен съемным или открывающимся защитным чехлом 21 изменяемой длины, например сильфоном. Вместо сильфона 21 может быть использована телескопическая облегченная труба. В любом случае может быть предусмотрено разъемное соединение (например байонет) для облегчения доступа к телескопам. Для предотвращения случайного (при открытом сильфоне) загрязнения колен телескопов их поверхность может быть покрыта водоотталкивающим составом, например на базе полиэтилена или полиолефина.
На фиг. 2 показан телескоп в составе четырех колен, но их может быть больше или меньше, что зависит от требуемой максимальной степени сжатия гусеничного обвода (отношения длин диагоналей ромба в максимально сжатом состоянии при работе движителя). Величина этой степени зависит от таких факторов, как допустимый клиренс, диаметр ступицы и т.д. При достаточно большой толщине стенок ступицы функции корневого колена может выполнять радиальный в ней канал, и тогда телескоп может иметь только одно подвижное колено. Вместо труб могут быть использованы коробчатые профили, напр., квадратного, прямоугольного или треугольного поперечного сечения, в том числе со срезанными углами для удобного расположения в них тел качения в виде цилиндрических роликов. Могут быть использованы и другие профили, например полый двутавр, имеющий максимальную жесткость при минимальной массе. Вместо многоколенного телескопа может быть использована единая телескопическая пружина, например коническая, из листовой заготовки.
Для того, чтобы оконечный участок этой пружины не прогибался, отклоняясь от ее прямолинейной геометрической оси, вовнутрь его может быть вставлен жесткий короткий (соответственно длине этого участка (сердечник), например конический с гладкой или винтовой поверхностью). При растянутой пружине этот сердечник поддерживает указанный участок, а при сжатой - ограничивает пределы ее сжатия, упираясь в стенку ступицы. Этот сердечник может быть полым и снабжен внутренними ребрами жесткости и облегчающими вырезами. Обращенный к ступице конец сердечника свободен, а другой - соединен с вилкой 20.
Возможен многоколенный телескоп, в котором только некоторые колена, например корневое, выполнены в виде телескопических пружин. В любом случае оконечное колено может быть сплошным либо полым, но с подкрепляющими диагональными распорками. Возможен телескоп в виде нескольких плоских колен, соединенных между собой наподобие элементов логарифмической линейки (корпус - одно колено, движок - другое и т.д.). Возможен сборный телескоп, состоящий из колен различного профиля и/или) вида. Возможен телескоп с ввинчивающимися друг в друга полыми колесами с винтовой несамотормозящей нарезкой. Вместо телескопа могут быть использованы устройства прямолинейного движения любой иной конструкции, например в виде плоского шарнирного многозвенника или в виде поступательной пары (поступательного механизма из нескольких таких пар), лишь бы они на рабочем участке своей траектории движения обеспечивали прямолинейное перемещение вилки 20 в направлении от ступицы 1 или к ней.
Может быть использовано также соединительное устройство, взятое из прототипа (трубчатая спица).
Корневое колено телескопа может быть снабжено наружными ребрами жесткости, а оконечное - внутренними диагональными распорками. Прочность и жесткость промежуточных колен обеспечиваются рациональным выбором конфигурации поперечного сечения, размеров, материала, упрочняющей обработки и т.д.
Телескоп может быть оборудован устройством, например шпонкой, для предотвращения осевого проворачивания колен. В стенках колен могут быть сделаны облегчающие вырезы.
В качестве тел качения могут быть использованы шарики, а еще лучше - корсетные или бочкообразные ролики с радиусом кривизны, равным радиусу кривизны внутренней поверхности сопрягаемого колена. В случае плоских стенок колен могут быть использованы цилиндрические ролики.
В наружной поверхности колен могут быть выдавлены продольные канавки требуемого профиля, в которых удобно располагаются и/или перемещаются тела качения. Эти тела могут быть выполнены из упругого материала, например из фторопласта.
Вместо отдельных тел качения могут быть использованы групповые, например в виде множества шариков или роликов, заложенных в множество гнезд в одной из сопрягаемых поверхностей, а также в виде шариковых контуров станочного типа, которые особенно удобно располагаются в сравнительно толстом корневом колене телескопа или в специальном на этом колене приливе (местном утолщении).
Вместо тел качения могут быть использованы антифрикционные прокладки из карбопластов или самосмазывающиеся из пористой бронзы с нанесенным на нее тонким слоем фторопласта со свинцовым наполнителем. При изготовлении хотя бы некоторых колен из цветного металла можно обойтись упрощенными антифрикционными мероприятиями. Но особенно большое упрощение одновременно с уменьшением массы телескопа достигается при использовании антифрикционных прочных конструкционных пластмасс, например армированных. Можно обойтись и без антифрикционных прокладок, использовав обработку, повышающую одновременно и скользкость и твердость (против задиров, заеданий и т.п.), например сульфоцианирование, или применив смазку.
Для повышения циклической прочности в движителе могут быть использованы трубы и тела качения, подвергнутые упрочняющей технологической обработке (полированию или раскатыванию) по поверхности взаимного соприкосновения. Циклическая прочность повышается также благодаря использованию указанных пружин и /или буферов сжатия, смягчающих ударные нагрузки.
Пружины могут быть и расположены не только на телескопах, но также между смежными секциями обвода и/или между телескопами и смежными с ними секциями обвода. Вместо пружин сжатия могут быть установлены пружины растяжения. Вместо пружин растяжения (сжатия) или совместно с ними могут быть использованы скручивающие пружины на шарнирах обвода или внутри их. Если телескоп надежно загерметизирован, то вместо механических пружин могут быть использованы пневматические: сжатый газ или воздух, закачанный во внутреннюю полость телескопа. Регулируя его давление, можно регулировать жесткость пружин.
Для уменьшения габаритов можно вместо винтовых пружин использовать тарельчатые. Винтовые пружины могут иметь неодинаковую жесткость, могут быть использованы также фасонные пружины.
Любые два входящие друг в друга колена телескопа могут быть соединены тороцилиндром (упругой цилиндрической трубой, выворачивающейся при взаимном поступательном движении колен). При достаточной герметизации такой тороцилиндр, выполненный из антифрикционного материала, например фторопласта, не только предотвращает или существенно уменьшает трение между коленами телескопа, но и обеспечивает телескопу упругие свойства (за счет воздуха, сжимаемого в полостях колен телескопа при его сжатии), благодаря чему можно отказаться от пружин.
Иногда от пружины и/или буферов можно отказаться при любой конструкции телескопа, если движитель используется лишь кратковременно и/или работает на мягком грунте, напр., на болотистом, в том числе в тундpе, на торфяниках и т.д.
Ступица может быть выполнена не только в виде цилиндрической втулки, но и в виде плоского диска, и тогда корневые колена телескопов прикрепляются к ней не своими торцами, а своими боковыми сторонами.
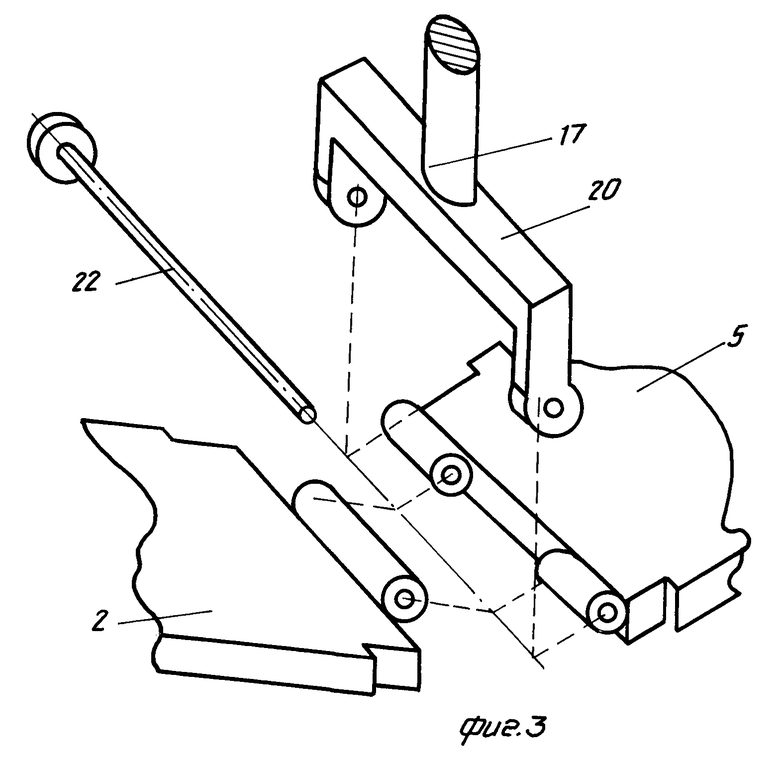
Расположенная на оконечном колене 17 телескопа 6 вилка 20 своими проушинами расположена соосно с проушинами шарнира на смежных секциях 2 и 5 гусеничного обвода и соединены с ними посредством пальца 2 с фиксатором от выпадения (не показан). При этом образуется шарнирный узел, который в зависимости от конкретных условий может быть снабжен смазочным устройством или антифрикционными элементами и/или герметизирован либо выполнен самоочищающимся (а. с. СССР N 1066874, кл. B 62 D 55/20, 1981). Но если движитель предназначен для работы на низкоабразивном грунте, например на черноземе, то шарнир может быть открытым. В шарнирный узел могут быть введены упругие элементы, например резиновые прокладки.
Хотя в данной конструкции количество проушин минимально, узел может быть выполнен многопроушинным. В любом случае поверхность шарнирного узла при движении по дороге может быть перекрыта съемным чехлом (не показан) для защиты дорожного покрытия от механических повреждений. Если же, наоборот, требуется усилить сцепление с опорной поверхностью, например при движении по льду, то на шарнирный узел надевается заостренный наконечник (не показан) в виде одной или нескольких шпор либо зазубренной пластины и т.д.
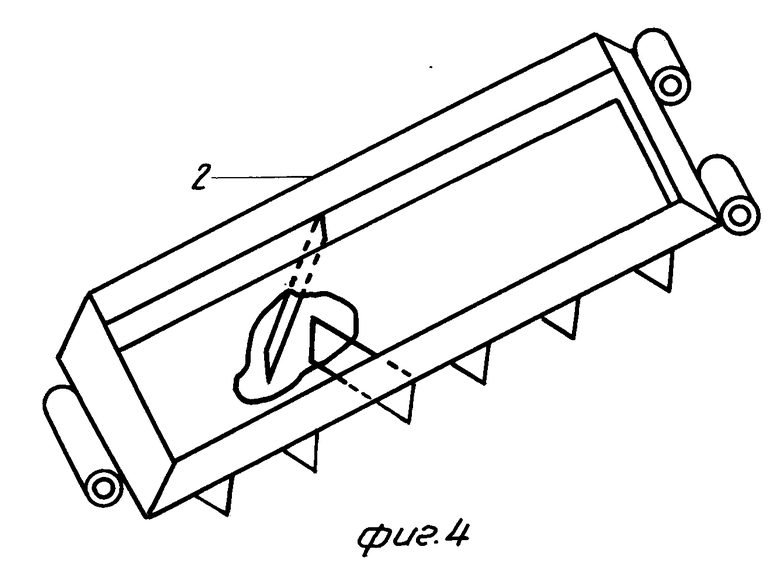
Каждая секция гусеничного обода выполнена в виде рамы, перекрытой опорной поверхностью, напр., металлическим плоским опорным листом, к которому прикреплены или выштампованы в нем грунтозацепы, шпоры и т.д., которые могут быть любой требуемой конфигурации, постоянными или сменными в зависимости от типа грунта и выполненными из металла или иного материала, например упругого, допускающего движение по дороге без разрушения ее покрытия. Грунтозацепы, шпоры и т. д. расположены на опорной поверхности листа, а иногда также и на опорной поверхности рамы. Торцы рамы могут быть снабжены сквозными отверстиями (каналами) для выдавливания грязи (самоочистка).
Рама может быть не только в виде прямоугольной в плане рамы, но и иной подходящей формы, например Н-образной. В последнем случае перекладина рамы находится в плоскости вращения движителя или в параллельной плоскости. Перекладина может быть прямолинейной, вогнутой, выпуклой или иметь любую иную форму.
Рама при виде сбоку может быть не прямолинейной, а иметь какую-либо иную конфигурацию, например выпуклую, в том числе изогнутую по радиусу качения, вогнутую или волнистую.
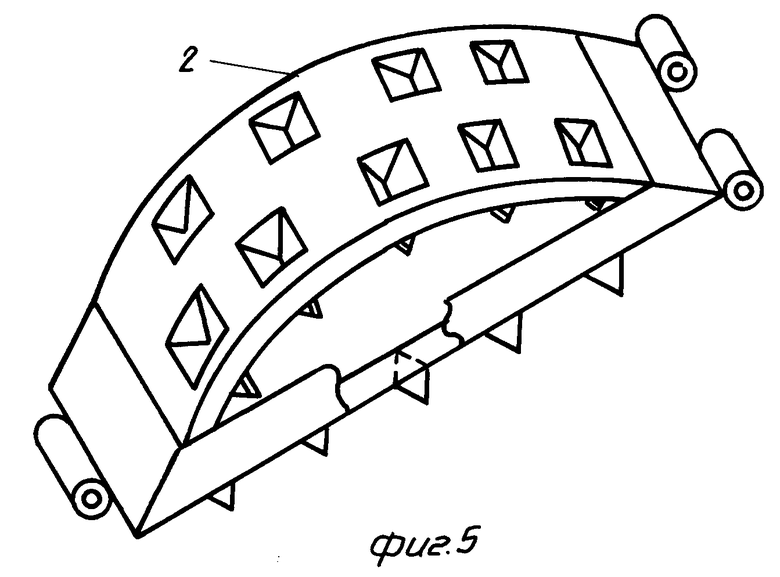
Возможно исполнение (фиг. 5), при котором опорный лист вогнут для улучшения уплотнения грунта и тем самым для дальнейшего увеличения проходимости. При этом так же может быть вогнута и рама.
На фиг. 4 и 5 показаны рамы, обращенные раструбом книзу, но возможны также рамы, обращенные раструбом кверху. При этом проушины будут находиться не у нижней кромки торца рамы, а у ее верхней кромки. Возможна рама не с плоскими кромками, а с кромками в виде двухгранного угла и с расположением проушин на ребрах этих углов. Возможна также рама с проушинами, существенно приподнятыми над грунтом для уменьшения их забивания пылью, грязью, и т.п.
На фиг. 4 и 5 показаны рамы с постоянным расстоянием между геометрическими осями шарниров, но это расстояние можно регулировать, выполнив раму в виде двух частей, соединенных по принципу салазок. Отрегулированные расстояния в процессе работы движителя должны оставаться постоянными.
Опорный лист может быть только простым (фиг. 4) или вогнутым (фиг. 5), но также выпуклым или изогнутым по радиусу качения движителя для повышения плавности хода при движении по дороге. Он также может иметь какую-либо иную конфигурацию, напр. , волнообразную в виде стиральной доски. Опорный лист также может быть выполнен в виде участка вогнутой сферической поверхности или вогнутой поверхности части многогранника, например иметь крышеобразную конфигурацию. Опорный лист может быть изготовлен не только из металла, но и из пластиков, в том числе армированных, а также из металлопластов типа "сэндвич".
В зависимости от свойств грунта опорный лист может быть не только сплошным, но также ажурным или решетчатым. При движении по грунту отверстия в листе способствуют выдавливанию грязи, т.е. самоочистке. При движении на плаву перфорированный лист при необходимости перекрывается накладным легким листом, например стеклопластиковым, или отверстия перекрываются заглушками.
Опорный лист может быть не жестким, а упругим, а также свободно деформируемым с копированием профиля грунта. Он может быть выполнен из упругого материала, например из тонколистовой стали или листовой резины, или набран из множества рядом расположенных резиновых жгутовых или винтовых пружин. Он может быть скомплектован из нескольких мелкозвенчатых гусеничных траков. Он также может быть выполнен из жесткого материала, но прикрепляться к раме посредством упругих элементов. Опорный лист может быть не только постоянным, но и смежным или съемным.
Возможен вариант, при котором рама вообще отсутствует, а секции 2 - 5 гусеничного обвода выполнены гибкими или изготовлены из гибкого материала и шарнирно соединены с телескопами в местах 10 - 13.
При любом исполнении секции гусеничного обвода на нее при движении по дороге с покрытием может быть надет съемный асфальтоходный башмак из сплошной или перфорированной резины или в виде пневматика с конфигурацией, аналогичной известной конфигурации пневмотрака гусеничной цепи. При частом сходе на асфальт секция может быть выполнена в виде несменяемого при любом режиме работы пневмотрака.
Обращенная к опорному листу (раме) поверхность башмака может быть гладкой или снабжена углублениями для захода в них шпор (грунтозацепов). В первом случае перед постановкой башмака на движитель шпоры (грунтозацепы) удаляются с поверхности листа (рамы), например вывинчиваются, а во втором - остаются на месте.
Съемный башмак может быть закреплен на секции гусеничного обвода посредством болтов (шпилек) и гаек либо с помощью быстродействующего соединения, например шарнирно-рычажного захвата (а.с. СССР N 1152859, кл. B 62 D 55/28, 1982).
Несменяемый башмак может быть выполнен в виде упругой, например резиновой, конструкции, закрепленной на промежуточной опоре, которая закрепляется на раме секции обвода, либо в виде резиновой конструкции, приваренной непосредственно к раме.
На обеих или на одной из двух смежных секций обвода в районе ее торца может быть установлен козырек (например, в виде гребенки) для защиты шарнирного узла от механических повреждений его грунтом, камнями и т.д. Козырек нависает над этим узлом и не только защищает его, но и улучшает сцепление движителя с грунтом или со льдом, работая в качестве дополнительного грунтозацепа (поры).
На вилке 20 или на торце одной из прикрепленных к ней секций гусеничного обвода может быть закреплен постоянный, съемный или убираемый, например выдвигаемый, наконечник с заглубляемой в грунт частью, конфигурация которой обеспечивает при этом образование лунок требуемой формы конической, клиновидной и т. д. Такие лунки служат для посадки в них рассады или для накопления влаги. Может быть закреплен наконечник иной конфигурации, например повышающей сцепляемость движителя со льдом. Геометрическая ось наконечника может быть смещена относительно геометрической оси соединительного устройства.
Для улучшения сцепления движителя с грунтом на концах проушин могут быть выполнены или закреплены зубья, выступы и т.п. Для уменьшения скалывания грунта и уменьшения сопротивления повороту боковые кромки рамы и башмака могут быть скошены или скруглены. Торцы резиновой части башмаков могут быть армированы прочным материалом, например снабжены металлической накладкой.
На ступице и на обращенных к ней поверхностях секций гусеничного обвода могут быть установлены острозубые гребенки (типа пилы), ножи и т.п. для перерезания стеблей водных растений при движении на плаву. В нерабочем положении эти гребенки и ножи защищены съемными чехлами.
Для повышения долговечности все детали гусеничного обвода изготовлены из износостойких материалов и подвергнуты рациональной упрочняющей обработке. Любая деталь движителя может быть изготовлена из металла или конструкционной пластмассы, в том числе армированной. В допустимых местах могут быть сделаны облегчающие вырезы или отверстия.
Расстояния между наружной поверхностью ступицы (в любом ее месте) и обращенной к ней поверхностью гусеничного обвода, а также ход телескопов должны обеспечивать возможность беспрепятственного сжатия обвода до требуемой величины. Однако на ступице и/или на обводе могут быть места, например выступы, специально предназначенные для взаимодействия с внутренней поверхностью обвода (или с наружной поверхностью ступицы) при достижении обводом максимальной степени сжатия. Такие места играют роль упоров и не допускают чрезмерного сжатия обвода, облегчая тем самым работу пружин.
Благодаря жесткому соединению (или конструктивному объединению) корневых колен телескопов со ступицей в средней части движителя образовалась ферма, придающая ему самонесущие свойства. Это позволило отказаться от тяжелых дисков. Кроме того, уменьшилось количество соединительных устройств. Благодаря длинному (вытянутому по направлению движения) пятну контакта оказалось возможным уменьшить ширину гусеничного обвода. Все это привело к уменьшению материалоемкости и массы движителя по сравнению с прототипом.
Для простоты телескопы изображены обычными прямыми линиями, без выделения колен. При работе движителя его части в процессе вращения ступицы непрерывно взаимно перемещаются, а сам он принимает множество циклически изменяющихся конфигураций, среди которых можно выделить несколько типовых.
Предположим, что в некоторый момент времени (фиг. 6) движитель при движении по ровной твердой поверхности имеет конфигурацию "вертикальный ромб" (показано сплошной толстой линией) и к его ступице 1 приложена нагрузка P. Поскольку каждый телескоп является однонаправленным, а его корневое колено 14 (фиг. 1) жестко соединено со ступицей или конструктивно с ней объединено, то при этом к боковым вершинам 11 и 13 ромба прилагаются силы Q1 и Q2 и соблюдается условие Q1 = Q2 = P/2. Под действием этих двух сил нижние стороны 2 и 5 ромба отклоняются книзу, поворачиваясь (относительно точки опоры 10 на грунт) по направлению дуговых стрелок 23 и 24, а вершины 11 и 13 описываются дуги с радиусом, равным длине секций 2 и 5. Это приводит к принудительному опусканию и удлинению горизонтальных телескопов 7 и 9. Их опускание приводит к укорачиванию нижнего телескопа 6 и к сжатию его пружин. Их удлинение приводит к принудительному разжатию их пружин, опусканию вершины 12, укорачиванию верхнего телескопа 8 и к сжатию его пружин. В результате ромб сплющивается по вертикали, приобретая конфигурацию квадрата с вертикальной диагональю (показано штриховой линией). При дальнейшем опускании ступицы указанный процесс продолжается, движитель сплющивается все больше и в конце приобретает конфигурацию горизонтального ромба (показан сплошной тонкой линией). Ромб сплющивается до тех пор, пока этот процесс не будет приостановлен сжатыми до предела пружинами. Максимальная допустимая степень сжатия регулируется гайками на оконечных коленах телескопов, резиновыми буферами или иными ограничителями, в том числе переставными, например установленными на обращенных друг к другу торцах смежных секций гусеничного обвода.
При неправильной регулировке максимальной допустимой степени сжатия или при отказе того или иного ограничителя может произойти чрезмерное сжатие пружины с последующей потерей упругости. Для предотвращения этого явления на витках пружин размещены выступы, наваренные или оформленные при изготовлении прутков, из которых навиваются пружины, направленные параллельно геометрической оси и пружины. При предельном сжатии пружин эти выступы препятствуют чрезмерному сближению витков. Высота выступов соответствует минимальному допустимому зазору между витками максимально сжатой пружины.
Термины "устройство прямолинейного движения" и "жестко прикреплены" использованы не в идеализированном, а в чисто техническом смысле. Имеется в виду, что признаки изобретения во взаимодействии обеспечивают принудительное перемещение боковых шарниров (фиг. 6) в стороны и вниз, а верхнего шарнира - вниз, когда к ступице приложена вертикальная нагрузка. В реальном движителе ступица, соединительные устройства и шарниры могут быть расположены не на общей геометрической прямой, а на некоторой линии (например ломаной) с определенной стрелой прогиба. Допустимую величину прогиба можно задать лишь функционально, как указано выше. Поэтому если в реальном движителе геометрические центры ступицы, соединительных устройств и шарниров расположены не на одной прямой, т.е. если соединительные устройства обеспечивают примерно прямолинейное движение, ступица соединена с ними практически жестко и т.д., то и такой движитель подпадает под формулу изобретения по данной заявке.
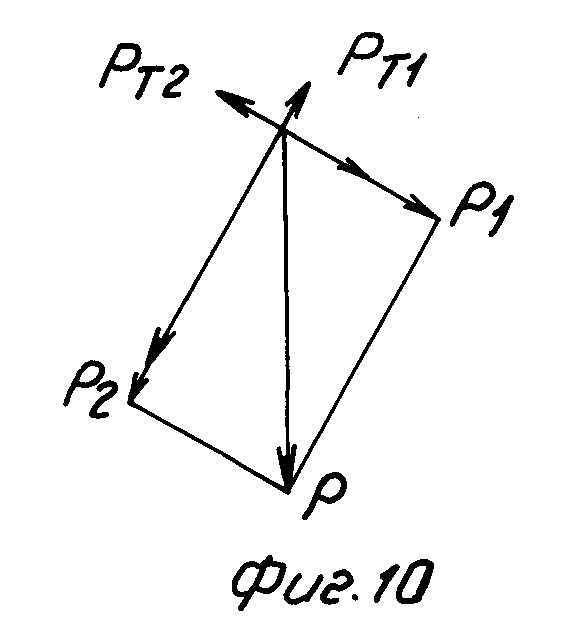
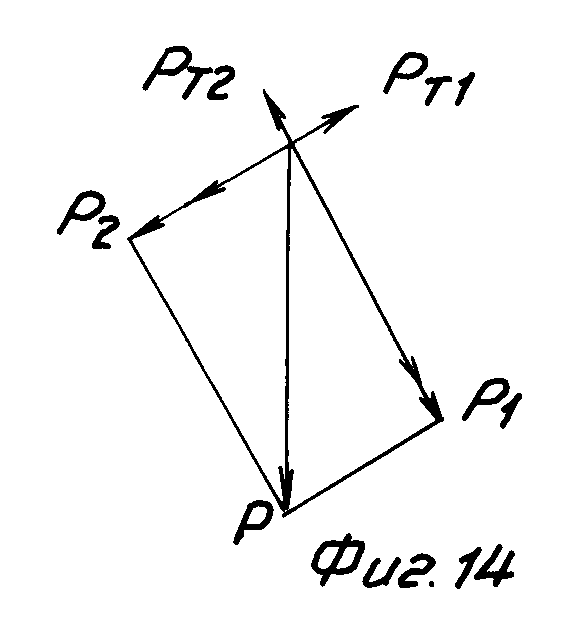
Предположим, что, вращаясь по часовой стрелке, движитель в некоторый момент времени находится в конфигурации "наклонный ромб" (фиг. 7), при которой его большая диагональ 12, 10 расположена не вертикально, а наклонно под некоторым углом α к дороге. При этом к ступице по-прежнему приложена нагрузка Р. Силу Р можно разложить на две составляющие Р1 и Р2 (фиг. 8), направленные по большой и по малой диагоналям ромба. В результате взаимодействия с телескопами к ступице приложены и силы трения Рт1 и Рт2, условно показанные в увеличенном масштабе. Поэтому по большой диагонали приложена разность сил Р1 - Рт2, а по малой диагонали - разность сил Р2 - Рт1. При этом Р2 - Рт1 > Р1 - Рт2. Разность сил Р1 - Рт2 действует аналогично приложенной вертикальной силе Р (фиг. 6), вызывая сжатие ромба по направлению большой диагонали, в результате чего он сплющивается, а его нижнее основание 2 приближается к грунту. Пружины на длинной диагонали ромба препятствуют его сжатию, а пружины на короткой его диагонали - помогают.
Одновременно с этим разность двух других сил Р2 - Рт1 создает некоторый вращающий момент, поворачивающий ромб относительно вершины 10 против часовой стрелки, и тем самым также приближает основание 2 ромба к грунту. Таким образом, основание ромба приближается к грунту сразу по двум причинам: вследствие сжатия ромба и вследствие его поворота.
Когда основание ромба приходит в контакт с грунтом, то возникает реакция опоры, обеспечивающая сжатие ромба также и вдоль малой диагонали. Поскольку Р2 - Рт1> > Р1 - Рт2, то сжатие по малой диагонали оказывается сильнее сжатия по большой диагонали и основание ромба прочно прижимается к грунту (фиг. 9 и 10). Движитель приобретает устойчивую конфигурацию "ромб с горизонтальным основанием". Верхний острый угол ромба (при вершине 12) обращен влево.
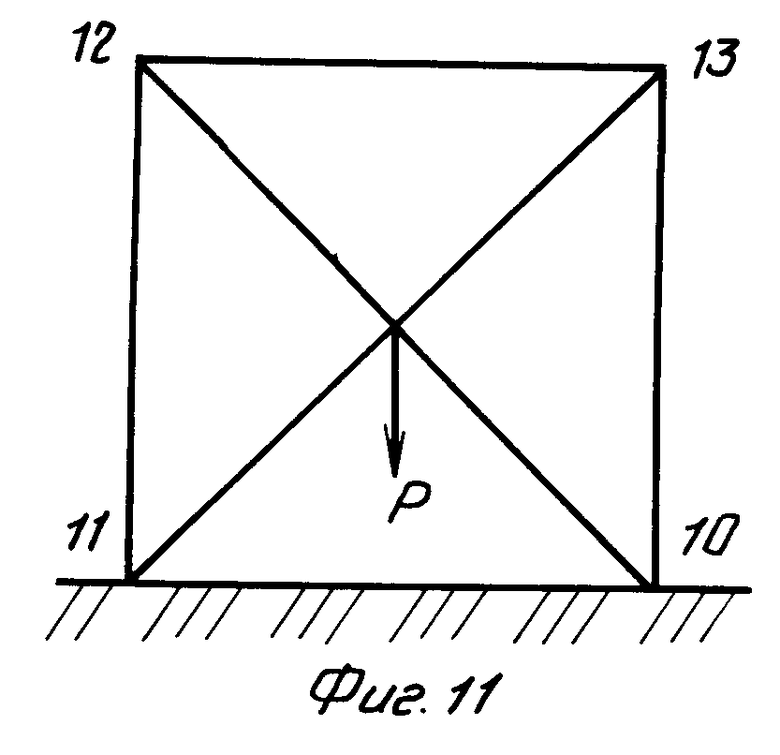
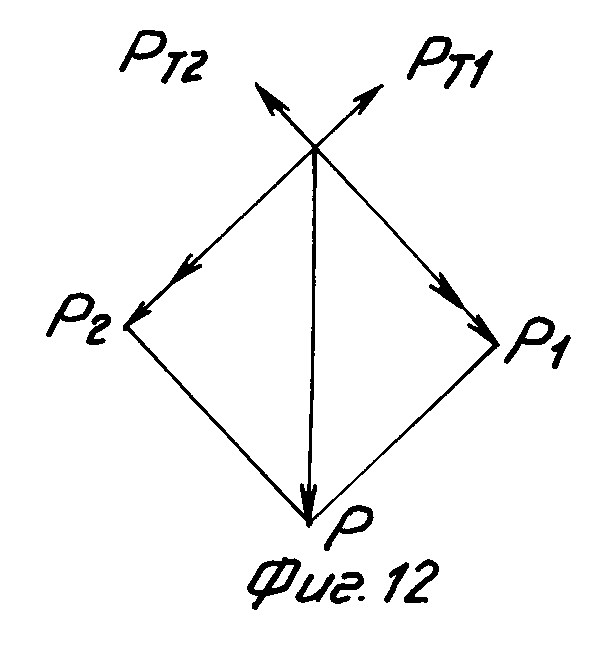
При дальнейшем вращении ступицы по часовой стрелке ромб под действием большей разности сил Р2 - Рт1 сначала остается сжатым больше по малой диагонали, чем по большой. Но мере поворота ступицы крутизна малой диагонали уменьшается, а крутизна большой увеличивается. Поэтому происходит перераспределение сил, и наступает момент, когда Р2 - Рт1 = Р1 - Рт2. При этом движитель приобретает конфигурацию "квадрат с горизонтальным основанием" (фиг. 11 и 12).
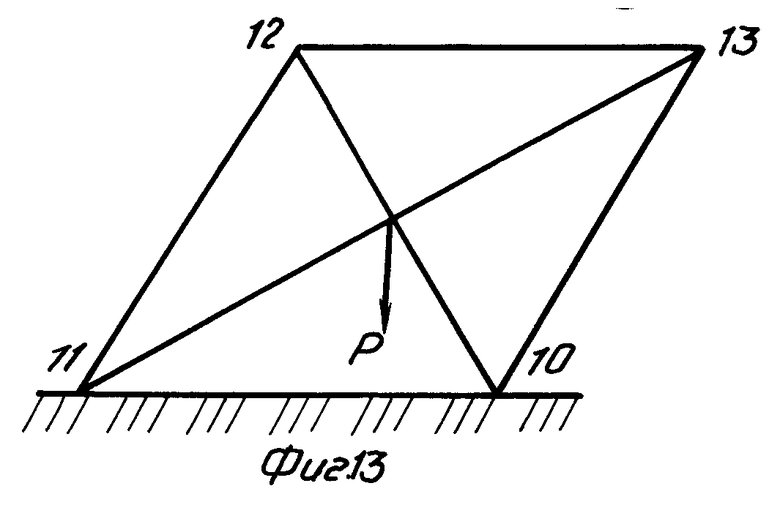
При дальнейшем вращении ступицы в том же направлении происходит дальнейшее перераспределение сил, в результате чего движитель снова приобретает конфигурацию "ромб с горизонтальным основанием", но уже с остроугольной вершиной, обращенной вправо (фиг. 13 и 14).
В результате оказывается, что при фазах движения, показанных на фиг. 7 - 13, секция 3 гусеничного обвода практически не открывается от грунта, т. к. движитель работает в гусеничном режиме.
Процесс изменения конфигурации движителя зависит от величины трения. Если трение сравнительно невелико, то основание ромба не отрывается от грунта. Для уменьшения трения предусмотрены соответствующие антифрикционные мероприятия: использование в телескопах тел качения, скользящих прокладок и т.п.
Если трение сравнительно велико, то основание ромба сначала несколько отрывается от грунта (сохраняя, однако, с ним контакт в вершине ромба), но затем снова на него опускается.
Из сказанного следует, что конфигурация по фиг. 6 при достаточно малом трении в движителе практически не достигается и была рассмотрена только для иллюстрации принципа работы движителя. Вместо нее реально встречается конструкция по фиг. 7, а еще чаще - по фиг. 9.
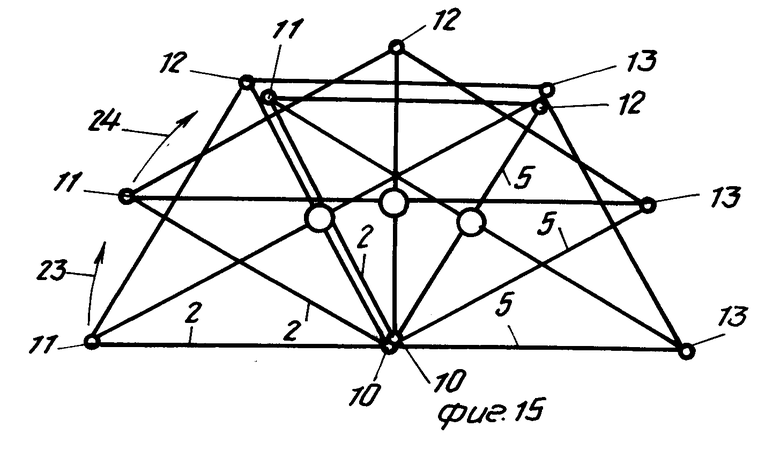
Предположим теперь, что ступица движителя, находящегося в устойчивой конфигурации "ромб с горизонтальным основанием" (фиг. 13), продолжает вращаться по часовой стрелке. При этом (фиг. 15) вершины 11, 12 и 13 перемещаются по направлению часовой стрелки. Отдельные этапы перемещения (например, для вершины 11) показаны дуговыми стрелками 23 и 24. Движитель перекрывается по вершине 10 тупого угла, сохраняя конфигурацию "ромб", но сменяя опору с основания 2 на основание 5 ромба. При этом движитель работает в режиме некруглого колеса. Затем он снова начинает приподниматься, опираясь на вершину 13 острого угла. Повторяется процесс, рассмотренный ранее применительно к фиг. 9.
Как при переходе через конфигурацию "квадрат с горизонтальным основанием" (фиг. 11), так и при перекатывании (фиг. 15) направление остроугольной, удаленной от грунта, вершины ромба меняется на обратное: если сначала она была обращена влево, то обращается вправо, и наоборот.
Таким образом, рабочий цикл движителя сопровождается периодическим изменением его конфигурации. Периодически изменяется и режим его работы: с гусеничного (фиг. 7-13) на некруглоколесный (фиг. 15), затем снова на гусеничный и т.д.
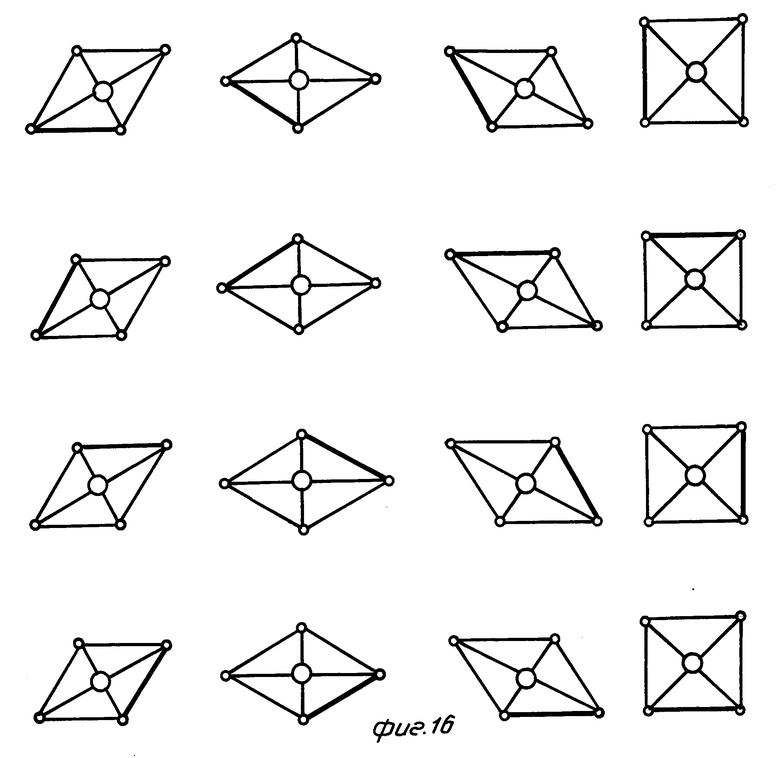
Основные фазы результирующего цикла работы движителя при вращении ступицы по часовой стрелке показаны на фиг. 16. Одна из сторон ромба условно выделена, чтобы легче было следить за процессом движения.
На данной фигуре введены следующие упрощения.
Между конфигурациями "ромб с горизонтальным основанием" и "квадрат с горизонтальным основанием" опущена конфигурация "наклонный ромб", т.к. она является кратковременной, переходной и неустойчивой.
Для экономии площади чертежа показана только первая половина рабочего цикла. Хотя исходное опорное основание и вернулось в исходное опорное положение, верхняя острая вершина ромба обращена не вправо, а влево. Вторая половина рабочего цикла, после обработки которой все элементы возвращаются в исходное положение, является зеркальным отображением первой его половины.
Как видно из фиг. 9, 11, 13 и 15, изменение конфигурации движителя при вращении ступицы по часовой стрелке сопровождается перемещением слева направо. На фиг. 9 ступица расположена над левым концом опорной секции 2, на фиг. 11 - над ее срединой, а на фиг. 13 - над ее правым концом. Из фиг. 15 также видно, что ступица перемещается слева направо (четко различаются три ее последовательные положения).
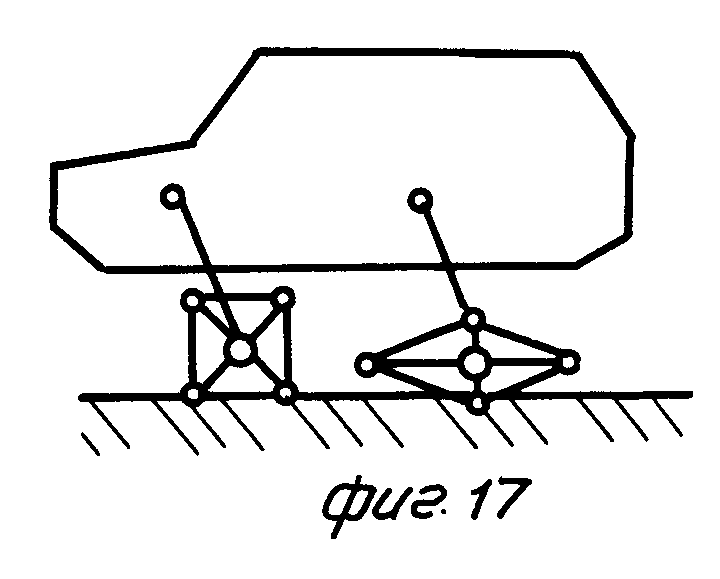
При движении по дороге (фиг. 17) движитель работает в вышерассмотренном порядке. Для предотвращения повреждения дорожного покрытия, а также дорожного полотна, на секции гусеничного обвода надеваются асфальтоходные башмаки, а на шарниры - асфальтоходные чехлы.
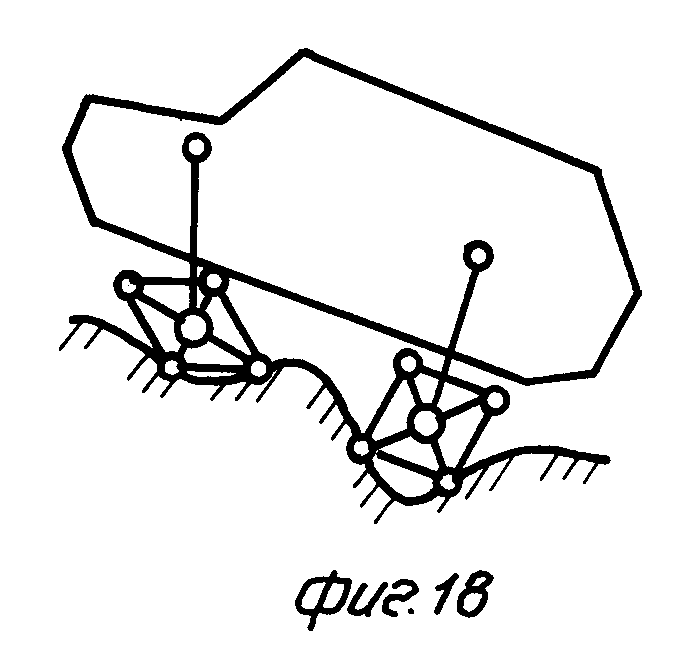
При движении по пересеченной местности (фиг. 18) движитель работает в основном так же, как и при движении по ровной поверхности. При попадании на выбоину или на выступ обвод движителя, благодаря динамизму своей конструкции, самоустанавливается, что облегчает ему их преодоление.
При движении по слабому грунту (болото, торфяник, пахота, подход к водной преграде и отход от нее) движитель принимает по отношению к нему конфигурации, аналогичные тем, которые он принимает при движении по твердому грунту, например "горизонтальный ромб", "квадрат с горизонтальным основанием" или "ромб с горизонтальным основанием". Благодаря малости сопротивления со стороны грунта, движитель может принимать конфигурацию "вертикальный ромб" и "квадрат с вертикальной диагональю".
Конфигурации "горизонтальный ромб" и "квадрат с вертикальной диагональю" при достаточно большой опорной площади секций обеспечивают достаточную реакцию грунта и предотвращают чрезмерное заглубление движителя в грунт. Конфигурации "квадрат с горизонтальным основанием" и "ромб с горизонтальным основанием" при этом условии также обеспечивают достаточную реакцию грунта и предотвращают заглубление в грунт. Наибольшие опасения относительно заглубления вызывает конфигурация "вертикальный ромб". Здесь все зависит от сочетания несущей способности грунта, опорной площади секций, их длины, характеристик грунтозацепов (высота, конфигурация, расположение и т. п.), в том числе шпор.
При неблагоприятном сочетании этих факторов движитель заглубляется в грунт до тех пор, пока нижняя вершина ромба не упрется в достаточно прочный его слой (который в зависимости от типа грунта может находиться на различной глубине). При упоре "вертикальный ромб" сжимается и трансформируется в конфигурацию "горизонтальный ромб", что сопровождается увеличением реакции грунта. Если же нижняя вершина ромба прочного слоя не достигает, то уже через 1/4 оборота ступицы движитель, взаимодействуя с грунтом, приобретает очередную конфигурацию, например "ромб с опорой на нижнюю сторону". При этом опорная поверхность обвода существенно увеличивается, благодаря чему заглубление движителя уменьшается или прекращается и он "выбирается наверх". В реальной машине используются несколько движителей. Маловероятно, чтобы все они одновременно находились в конфигурации "вертикальный ромб". Поэтому машина в целом в любом случае имеет достаточную проходимость.
При исходной конфигурации "квадрат с вертикальной диагональю" движитель работает, как и в предыдущем случае, но в более благоприятных условиях, т. к. прямой угол больше острого, и поэтому исходное заглубление меньше. Сказанное относится к грунту с весьма низкой несущей способностью. Движитель успешно на нем работает. При более высокой несущей способности грунта движитель работает еще более успешно.
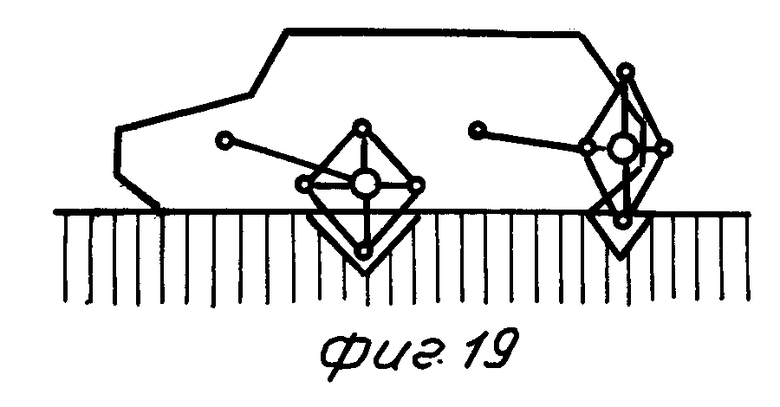
При движении по снегу зимой (а по тундре - и летом) движитель обеспечивает перемещение машины за счет уплотнения снега секциями гусеничного обвода и/или сцепления шпор со снегом либо с грунтом тундры. При этом машина имеет вид, аналогичный показанному на фиг. 17 и 18. Движение продолжается даже в том случае, если машина ложится днищем на снег или на грунт тундры (фиг. 19).
Переход движителя с одного режима работы на другой, например с дороги на местность и обратно, с болотистого грунта на снег и обратно и т.д., происходит без каких-либо переналадок в нем. В любом из вышеуказанных сухопутных режимов движения машина управляется любым известным способом (например, притормаживанием движителей одного борта). Толчки при движении амортизируются пружинами и буферами движителя, а также подвеской машины.
При движении по снегу, льду или болоту (тундре), когда машина ложится на них своим днищем, а также при движении на плаву необходимо, чтобы ступица движителя располагала несколько выше уровня днища. Для этого требуется ее приподнимать, например, посредством подвески. Может быть использована подвеска на продольных, поворотных в вертикальной плоскости, рычагах (балансирах), связанных с управляемым силовым приводом (гидро- или пневмоцилиндром). Такая подвеска особенно целесообразна, если машина снабжена системой автоматического регулирования или стабилизации уровня кузова. Балансиры выполнены полыми и внутри их расположена передача (например, цепная) на движители. В случае гидро- или электропривода движителя мотор может быть расположен в его ступице.
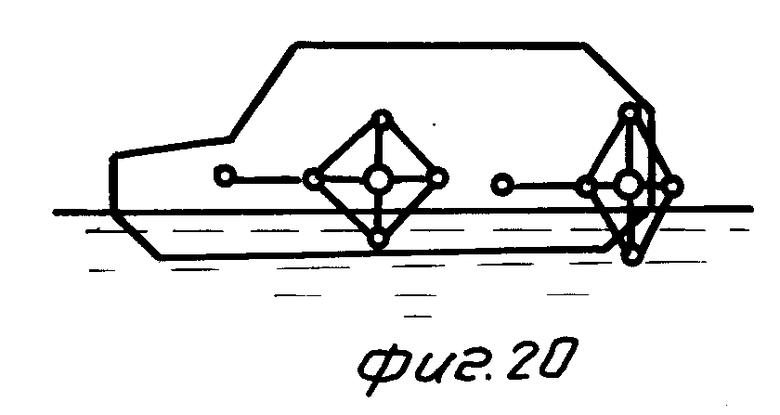
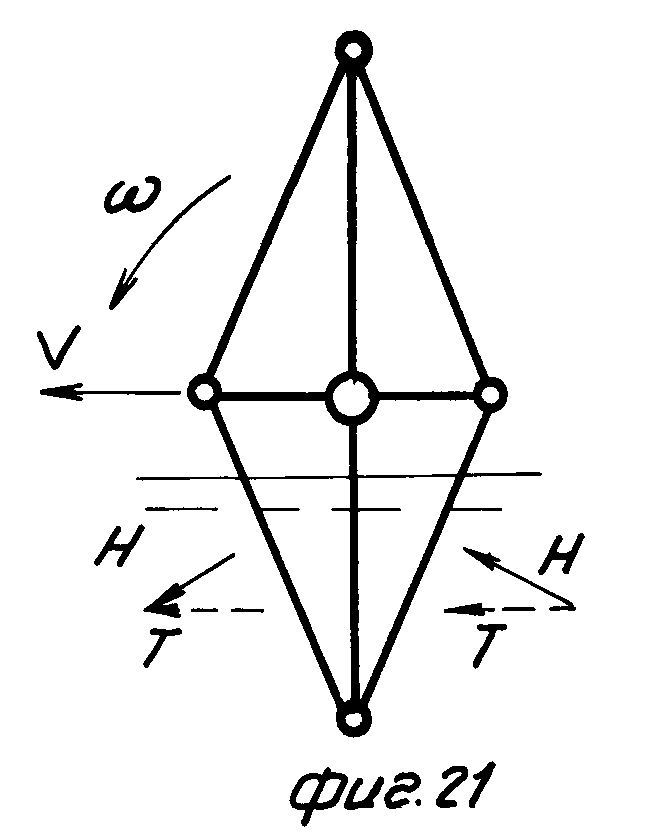
При движении на плаву (фиг. 20) движитель работает как двухлопастное гребное колесо и может принимать конфигурации "горизонтальный ромб", "вертикальный ромб", "квадрат с вертикальной диагональю", "квадрат с горизонтальным основанием" и "ромб с горизонтальным основанием". Как видно из фиг. 21-26, при вращении движителя (например против часовой стрелки) с угловой скоростью ω , любой из этих конфигураций при взаимодействии с потоком воды на погруженных в нее участках секций обвода возникает направленная влево реактивная сила H, в любой момент времени нормальная к плоскости секции. Ее горизонтальная проекция T также направлена влево и является упорной силой, обеспечивающей поступательное движение влево секции (вектор V), ступицы, а вместе с ней и всего движителя, а значит, и машины. При любой из указанных конфигураций, упорная сила T направлена в одну и ту же сторону (влево). Эффективность движителя как гребного колеса существенно возрастает в случае секции вогнутой конфигурации (фиг. 5) или с гибким опорным листом. Алферьев М.Я. Судовые движители. М.: Водный транспорт, 1938, с. 105 и 430.
При движении на плаву машина управляется такими же способами, что и при движении по суше (например притормаживанием движителей одного борта), но в сочетании с ними или вместо них может быть использован руль лодочного типа.
При преодолении водных преград часто встречаются (особенно в дельтах рек) мели, перекаты и т.д. Движитель преодолевает их с ходу, не прерывая движения.
Хотя на фиг. 17, 18, 19 и 20 движители показаны в разных конфигурациях, они могут находиться и в одинаковых конфигурациях.
Данный движитель не вызывает вредного переуплотнения почвы при сельскохозяйственных работах и поэтому является экологически чистым.
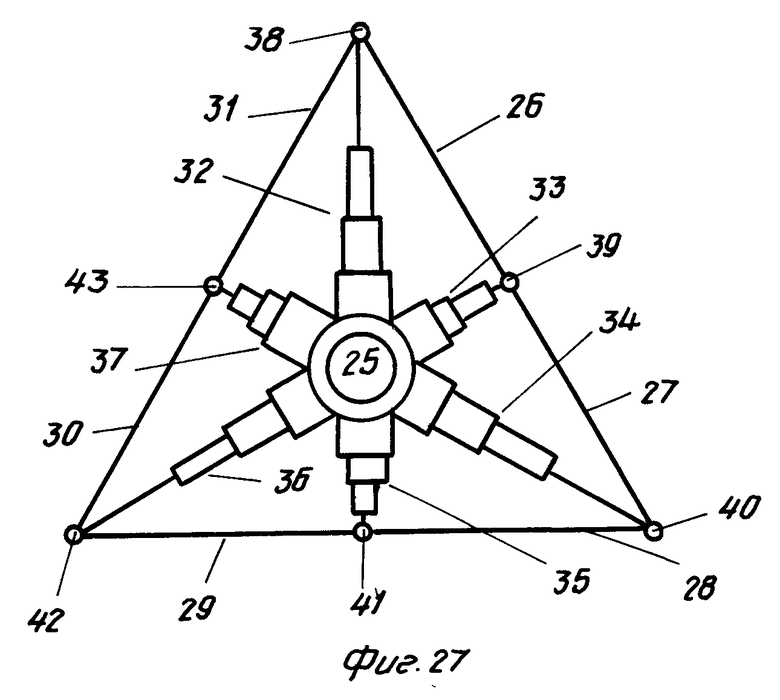
Во втором примере практического исполнения изобретения предложенный движитель оборудован не четырьмя, а шестью телескопами для повышения плавности хода. По конструкции он аналогичен движителю с четырьмя телескопами. Движитель (фиг. 27) содержит ступицу 25, гусеничный обвод (не обозначен) в составе шести секций 26, 27, 28, 29, 30 и 31 и шесть соединительных между ними устройств прямолинейного движения, например телескопических (далее - телескопы) 32, 33, 34, 35, 36 и 37. Эти телескопы расположены с равномерным угловым шагом (около 60о) относительно геометрической оси (не показана) ступицы 25 и в плоскости вращения движителя (или параллельно ей) и жестко соединены со ступицей) (или конструктивно с ней объединены) обращенными к ней своими концами, а своими обращенными к гусеничному ободу концами телескопы шарнирно соединены с ним в местах 28, 39, 40, 41, 42 и 43, равномерно разнесенных по его длине. Конструкция телескопов и остальных частей движителя аналогична их конструкции в движителе с четырьмя телескопами.
Работа шестителескопного движителя в основном аналогична работе четырехтелескопного. На чертежах телескопы для простоты условно изображены прямыми линиями, без выделения колен. При работе движителя его части могут принимать множество конфигураций, сводимых к нескольким типовым.
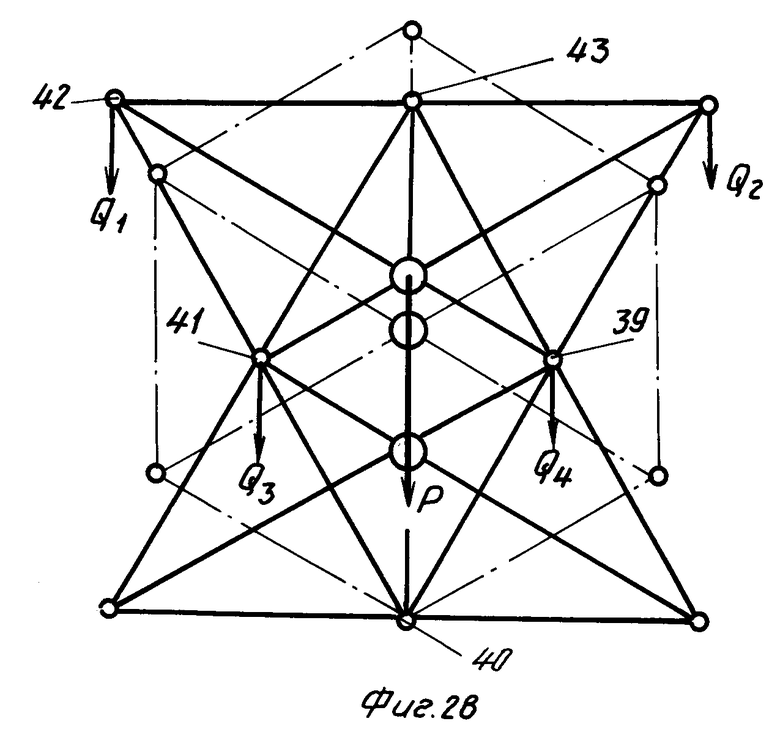
Предположим (фиг. 28), что при движении по ровной твердой поверхности движитель в некоторый момент времени имеет конфигурацию "вертикально расположенный правильный треугольник с опорой на вершину" 40 (обозначено сплошной толстой линией) и что к его ступице приложена вертикальная нагрузка P. В результате к его шарнирам 38, 39, 41 и 42 будут приложены силы Q1, Q2, Q3 и Q4. При этом Q1 = Q2 = Q3 = Q4 = -P/4. Под действием этих сил движитель перейдет сначала в неустойчивую конфигурацию "правильный шестиугольник с опорой на вершину" (показано штриховой линией), а затем в устойчивую конфигурацию "правильный треугольник с опорой на основание" (показано сплошной тонкой линией) с соответствующим опусканием ступицы. В процессе вращения ступицы движитель попеременно переходит из устойчивой конфигурации "правильный треугольник с опорой на основание" в устойчивую конфигурацию "правильный шестиугольник с опорой на основание".
В отличие от четырехтелескопного движителя в работе шестителескопного движителя отсутствует фаза переката (аналогичная фиг. 15) и он работает в чисто гусеничном режиме.
При работе шестителескопного движителя возможно заедание, если в конфигурации "правильный треугольник" две смежные секции не расположатся на одной прямой, а "проскочат" это положение, в результате чего движитель приобретает конфигурацию "трехлучевая звезда". Для того, чтобы этого не произошло, предусмотрены ограничители, не допускающие перехода через воображаемую прямую, соединяющую каждые три последовательно расположенных шарнира гусеничного обвода. Еще лучше, если эти ограничители вообще не допускают раскрытия секций на угол, превышающий некоторую максимально допустимую величину, меньшую, чем 180о, например 175о. Такие ограничители могут быть выполнены в виде выступов или регулируемых упоров на обращенных друг к другу торцах смежных секций обвода.
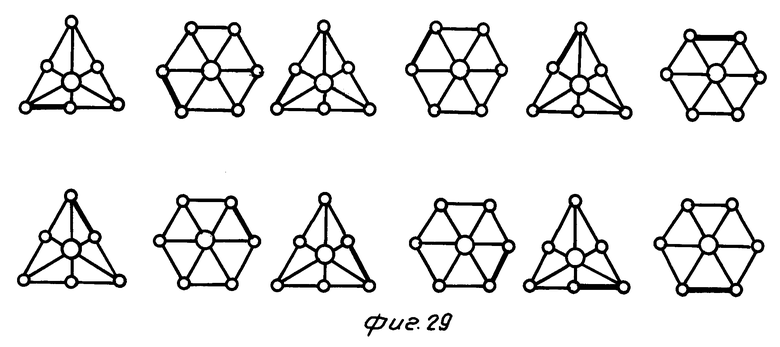
Основные фазы рабочего цикла движителя схематически показаны на фиг. 29. Одна из секций обвода условно выделена, чтобы легче было следить за процессом движения.
При движении по пересеченной местности движитель работает так же, как и при движении по ровной поверхности. При попадании на выбоину или на выступ движитель, благодаря динамичности своей конструкции, самоустанавливается, что облегчает ему преодоление неровностей.
При движении по дороге движитель работает аналогичным образом. Для предотвращения повреждения дорожного покрытия, а также дорожного полотна на секции гусеничного обвода надеваются асфальтоходные башмаки, а на шарниры - асфальтоходные чехлы.
При движении по слабому грунту (в том числе болотистому, при подходе к водной преграде и при выходе из нее, а также по пахоте) движитель принимает по отношению к грунту те же ранее указанные устойчивые конфигурации, которые он принимает при движении по твердому грунту, а также неустойчивые "правильный треугольник вершиной вниз" и "правильный шестиугольник вершиной вниз". При устойчивых конфигурациях площадь опорной поверхности движителя достаточна для предотвращения его заглубления в грунт. При неустойчивых конфигурациях движитель своей нижней вершиной либо достигает сравнительно глубокого твердого слоя грунта либо не достигает его. В первом случае при упоре в твердый слой движитель изменяет свою конфигурацию на устойчивую, после чего заглубление прекращается. Во втором случае входят в действие его боковые секции, оцепляющиеся своими грунтозацепами с грунтом и создающие дополнительную реакцию грунта. Если это по каким-либо причинам не происходит или дополнительная реакция грунта недостаточна, то уже через 1/6 оборота ступицы движитель переходит в очередную устойчивую конфигурацию, создавая достаточную опорную силу и вылезая из грунта.
При движении по снегу зимой (а по тундре - и летом) движитель обеспечивает перемещение машины за счет уплотнения снега секциями гусеничного обвода или сцепления шпор со снегом либо с грунтом тундры. Как и в случае четырехтелескопного движителя, движение продолжается даже тогда, когда машина ложится днищем на снег или на грунт тундры.
При любом из сухопутных режимов движения машина управляется любым известным способом, например путем притормаживания движителей одного борта. Толчки при наезде на неровности и от некруглости движителя смягчаются его пружинами и буферами, а также подвеской машины.
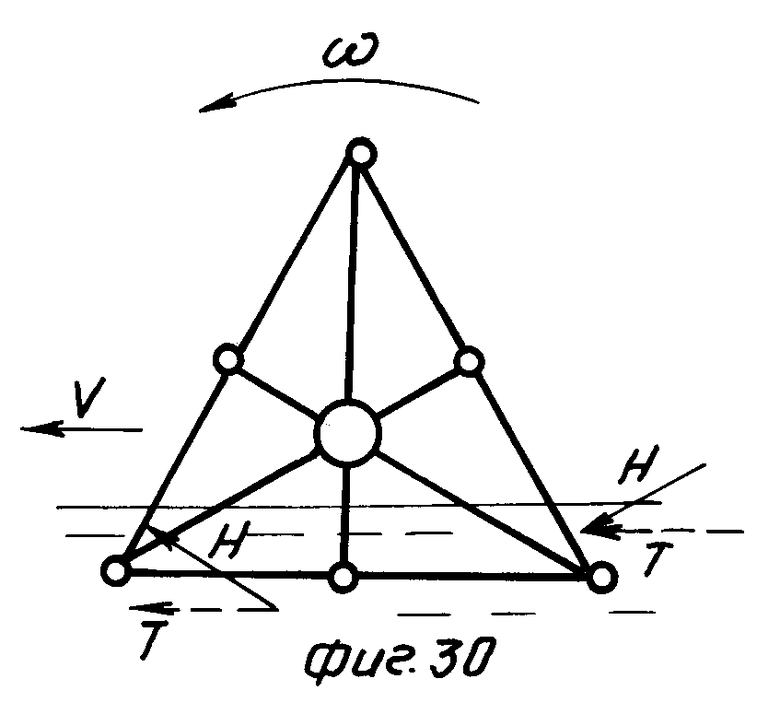
На плаву движитель работает в режиме гребного колеса и может принимать ранее указанные (для движения по слабым грунтам) конфигурации. Как видно из фиг. 30-33, при вращении движителя против часовой стрелки с угловой скоростью ω в любой из этих конфигураций при взаимодействии с водой погруженных в нее секций гусеничного обвода возникают нормальная сила H и ее горизонтальная проекция T. Последняя является упорной силой и обеспечивает поступательное движение влево по направлению стрелки V. Эффективность движителя в гребном режиме существенно увеличивается в случае секций с вогнутой (фиг. 5) или гибкой опорной поверхностью.
При преодолении водных преград часто встречаются (особенно в дельтах рек) мели, перекаты и т.д. Движитель преодолевает их с ходу, без каких-либо переналадок в нем. При движении на плаву машина управляется такими же способами, как и при движении на суше. Но в сочетании с ними или вместо них может быть использован руль лодочного типа.
Движитель может иметь 4 или 6 телескопов. Их количество может быть и большим, но это мало целесообразно, т.к. при этом конфигурация гусеничного обвода приближается к окружности. Хотя это сопровождается улучшением плавности хода, проходимость ухудшается.
Как в четырехтелескопном, так и в шестителескопном движителе для обеспечения оптимальной упругой характеристики по меньшей мере некоторых пружин в телескопах они выполнены составными (из нескольких входящих друг в друга пружин с различными упругими характеристиками), фасонными (например в виде винтовой пружины сжатия, средняя часть которой имеет увеличенный шаг и повышенную упругость) и т.д.
В простейших случаях колебания этих пружин можно не демпфировать. К таким случаям относятся движители, постоянно работающие с малой скоростью (в дождевальных установках, в машинах для работы на полях, засоренных камнями, со скоростью 0,1 км/ч, в картофелеуборочных машинах со скоростью 1,6-3 км/ч и т.д.).
При необходимости же демпфирования колебаний этих пружин могут быть предусмотрены (в зависимости от конкретных условий эксплуатации движителя) порознь или в совместно следующие конструктивные мероприятия. Между витками пружины расположены амортизирующие блоки из вязкоупругого материала, которые при сжатии расходуют энергию на выделение тепла. Полость телескопа заполнена вязкоупругими эластомерными частицами или упругими элементами из пористого эластомера, пропитанного жидкостью (например сжимаемой силиконовой), в результате чего образуется жидкостное трение. Для того, чтобы эти частицы или элементы не мешали прохождению тел качения, они скомплектованы в виде полого цилиндра (втулки) с продольными прорезями или канавками для этих тел, а вязкоупругие эластомерные частицы заключены в обоймы.
Уплотнения между коленами телескопа усилены с таким расчетом, чтобы он мог работать в режиме пневматического амортизатора. Вследствие нагрева сжимаемого воздуха (или иного закачанного в амортизатор газа) такой амортизатор может быть использован на снегоходах, а также в иных машинах для работы в зонах холодного климата (Заполярье, Сибирь, Дальний Восток, Антарктика). Внутри полости телескопа расположены последовательно один или несколько гидравлических амортизаторов обычного типа (например МКЗ). В частности, может быть использован самонастраивающийся амортизатор нового типа, вписывающийся в габариты серийного изделия (Автомобильная промышленность, 1985, N 1, с. 13). Так же может быть использован новый однотрубный амортизатор с наружным диаметром всего 28-60 мм/см (Автомобильная промышленность, 1985, N 7, с. 13). Поскольку от механических повреждений они защищены стенками телескопа, с них могут быть сняты предохранительные чехлы юбкообразного типа. Для лучшего охлаждения амортизаторов в ступице и в стенках колен могут быть вырезы или отверстия.
Амортизаторы обычного типа расположены вне колен телескопа, рядом с ним. В полой ступице движителя расположен поворотный, например рычажно-лопастной, амортизатор. На охватываемом колене телескопа установлены магниты, а на охватывающем - обмотка, соединенная с электрическим сопротивлением. При возвратно-поступательном взаимном перемещении колен в обмотке индуцируется электрический ток, нагревающий сопротивление и тем самым рассеивающий энергию колебания пружины. Между щеками проушин в шарнире расположены фрикционные шайбы.
Если соединительные пальцы в шарнирах имеют достаточные размеры и выполнены полыми, то по меньшей мере некоторые пружины в телескопах могут быть выполнены скручивающими и размещаться внутри них. Там не расположены поворотные амортизаторы, например гидравлические.
Если используется не многоколенный телескоп, а в виде телескопической пружины, то для демпфирования колебаний служат вышеуказанные устройства, кроме первого. Вместо этого между витками пружины расположена фрикционная, например полиамидная, прокладка.
В любом случае амортизаторы могут быть установлены не на всех телескопах (шарнирах), а лишь на некоторых, например расположенных взаимно оппозитно по отношению к ступице. Вместо механической пружины и амортизатора может быть использована встроенная в телескоп гидропружина замедленного действия или пневмогидравлический упругий элемент замедленного действия. Если в телескопе установлены резиновые буфера, работающие не на сжатие, а на срез, особенно многослойный, то иногда можно обойтись без амортизаторов, т. к. они сами служат амортизаторами.
Машина может иметь обычную подвеску, т.к. значительная часть колебаний демпфируется в самом движителе. Однако при повышенных требованиях к плавности хода (например в санитарных автомобилях) может быть использована известная система автоматической стабилизации (регулирования) уровня транспортного средства и/или подвеска, специально предназначенная для некруглых колес (а.с. СССР N 1034827, кл. B 60 C 3/02, 1980).
Желательно, чтобы при движении по суше ступицы движителей располагались ниже уровня днища корпуса машины, а при движении на плаву - выше него. Поэтому подвеска должна обеспечивать достаточно большой регулируемый ход ступицы. Этому требованию удовлетворяет подвеска на управляемых поворотных (подъемно-опускных) рычажных балансирах с силовым приводом. Балансиры могут быть как продольными, так и поперечными, как одноплечными, так и двухплечными. Они могут быть полыми с размещением приводного гидро- или электромотора в ступице. Хотя оптимальной является регулируемая по высоте (управляемая) балансирная подвеска, вместо нее также могут быть использованы регулируемые по высоте подвески других типов, например вертикальная цилиндрическая типа свечной, используемой в портальных автомобилях.
В любом случае для движения на плаву можно устранить или хотя бы уменьшить поток, набегающий на надступичную часть движителя не путем поднятия последнего, а с помощью гидродинамических (водоотражательных) экранов (щитков, кожухов и т.п.). В качестве таких экранов могут быть использованы колесные ниши корпуса, противогрязевые щитки, брызговики и т.д. Для повышения эффективности они прикрываются боковым экраном, например фальшбортом. При наличии таких экранов движитель обеспечивает движение на плаву даже в том случае, если не только его ступица, но и он сам (и даже весь экран) погружен в воду. Для еще большего повышения эффективности рабочей поверхности ниши, брызговика и т. п. придается специальная конфигурация (пат. США N 3688731, кл. B 60 F 3/00).
Требуемый тип подвески зависит также и от осадки машины на плаву. В случае мелкосидящих (с малой посадкой корпуса) машин может оказаться, что на плаву ступица автоматически располагается выше уровня воды, и тогда вопрос о регулировании подвески по высоте отпадает.
При использовании данного движителя для переоборудования серийных дорожных машин, например во внедорожные, может использоваться их штатная подвеска.
Как указывалось выше, в движителе имеется возможность регулировать степень максимального сжатия гусеничного обвода в конфигурации "ромб". Регулируя степень сжатия, можно в зависимости от конкретных дорожных условий изменять соотношение между плавностью хода и проходимостью. При прохождении трудно преодолимых участков местности иногда приходится временно поступаться плавностью хода для улучшения проходимости. Данный движитель может быть как ведущим, так и неведущим, как поворотным, так и неповоротным, и т.д.
На одной и той же машине могут быть использованы движители только четырехтелескопные или только шестителескопные или четырех- и шестителескопные совместно (а также в любом случае в сочетании с традиционными движителями).
Движитель легко монтируется на штатную ось (полуось) и легко демонтируется с нее подобно традиционному колесу. Движитель может быть установлен на полуосях, связанных с дифференциалом, с обгонной муфтой (в том числе управляемой) и т.д.
Управление машиной с данным движителем производится любым из известных способов, например поворотом движителей обоих бортов относительно вертикальных осей (аналогично повороту обычных колес), притормаживанием (или ускорением) движителей одного борта, реверсированием движителей одного борта или совместным использованием этих способов. При использовании данных движителей только вместо неуправляемых, например задних, колес поворот производится с помощью управляемых колес (передних). При движении на плаву управление производится либо только данным движителем, либо только рулем (например лодочного типа), либо совместно.
Движители могут быть установлены на штатных подвесках и управляться традиционными способами. Поэтому они могут быть использованы для быстрого преобразования существующих колесных машин нормальной проходимости в машины повышенной и даже высокой проходимости, а при наличии водоизмещающего корпуса или поплавков - в амфибии. Иногда бывает достаточно заменить данным движителем не все колеса, а только ведущие.
При четырех соединительных устройствах с грунтом постоянно контактирует по меньшей мере 1/4 = 0,25 длины обвода, а при шести - по меньшей мере 1/6 = 0,17. Это больше, чем в прототипе, в котором эта величина постоянно равна 0,15. При сильно сжатом горизонтально расположенном ромбе длина контакта приближается к 0,5 длины обвода, т.е. практически равна соответствующей величине для традиционного гусеничного движителя. При постановке треугольника на длинную сторону длина контакта составляет около 0,33 длины обода, что в два раза больше, чем в прототипе.
Данный движитель экологически чист, легок, прост по конструкции и может работать в гусеничном и гребном режимах (с автоматическим переходом из одного в другой), обеспечивая высокую опорно-сцепную проходимость и достаточную упорную силу, и потому является практически универсальным. Это позволяет использовать его в резко различающихся дорожно-грунтовых условиях. Машина с таким движителем является действительно (а не только по названию) вездеходом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2124449C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2190552C2 |
| КОЛЕСО С ИЗМЕНЯЕМОЙ КОНФИГУРАЦИЕЙ ОБВОДА | 1999 |
|
RU2152880C1 |
| КОЛЕСО С ИЗМЕНЯЕМОЙ КОНФИГУРАЦИЕЙ ОБВОДА | 2004 |
|
RU2268823C1 |
| Колесо с изменяемой конфигурацией обвода | 1982 |
|
SU1088955A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| Устройство для исследования кинематики гусеничной машины | 1977 |
|
SU696332A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2004 |
|
RU2279628C2 |
| Движитель гусеничного транспортного средства | 1987 |
|
SU1423449A1 |
| ЭЛАСТОМЕРНЫЙ ТРАК К ДВИЖИТЕЛЮ ТЯГОВО-ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2108937C1 |

Использование: в амфибиях, снегоболотоходах. Сущность изобретения: движитель содержит ступицу 1, гусеничный обвод из четырех секций 2 - 5, соединительные телескопические устройства 6 - 9 прямолинейного движения. Движитель работает в гусеничном режиме, обеспечивая высокую опорно-сцепную проходимость. При вращении в воде движитель создает упорную силу, обеспечивая движение на плаву. 33 ил.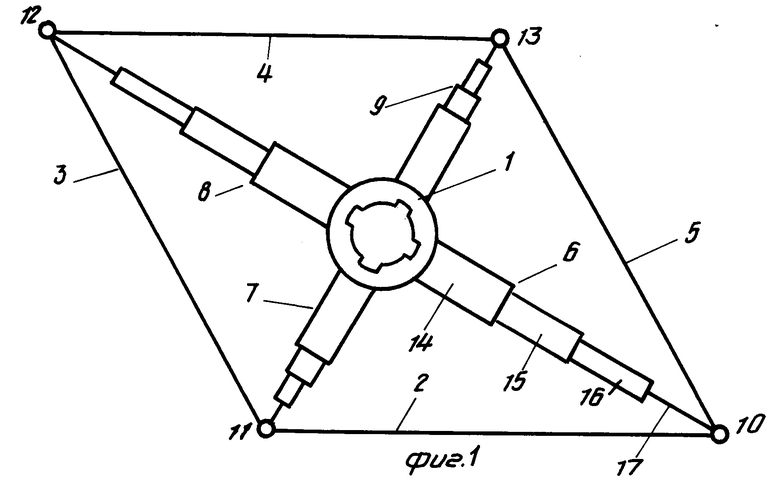
ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА, содержащий ступицу, обвод из четного количества шарнирно соединенных между собой опорных секций с одинаковым расстоянием между геометрическими осями шарниров каждой из них, и такое же количество соединительных, расположенных между ступицей и соответствующими шарнирами устройств прямолинейного движения, своими обращенными к ступице концами соединенных с ней в местах, расположенных с равным угловым шагом относительно ее геометрической оси, а своими обращенными к обводу концами соединенных с его шарнирами, отличающийся тем, что соединительные устройства расположены радиально и обращенными к ступице концами жестко с ней соединены или конструктивно с ней объединены, а количество секций обвода равно четырем или шести.
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
