Настоящее изобретение относится к установкам для перераспределения тяговых усилий с дифференциальным эффектом, а более точно - к механизмам распределения мощности для привода ведущих осей и колес транспортного средства.
Известен червячно-винтовой дифференциал, представляющий собой червячный редуктор со свойствами, аналогичными свойствам обычного конического дифференциала. (Лефаров А.Х. "Дифференциалы автомобилей и тягачей" 1972, "Машиностроение", Москва, с. 85). Силовая связь между полуосями осуществляется двумя полуосевыми червячными шестернями и тремя рядами сателлитов. Каждый ряд сателлитов имеет четыре (иногда три) сателлита. Силовая связь между сателлитами и корпусом осуществляется через опоры сателлитов, выполненные в приливах корпуса. Когда разность крутящих моментов, передаваемых полуосевыми червячными колесами, не превышает внутреннего момента трения дифференциала, то он не работает, когда же эта разница превысит момент трения, то сателлиты придут в движение и дифференциал начнет работать. В случае потери сцепления одним из ведущих колес червячный дифференциал блокируется, не давая этому колесу возможности увеличить частоту вращения. Степень блокировки зависит от момента внутреннего трения, которое определяется углом наклона винтовой линии червяка. В существующих конструкциях этот угол равен 24-26 градусов. В настоящее время червячно-винтовой дифференциал "Torsen" используется как в качестве межосевого, так и межколесного дифференциала. Преимуществом дифференциала является компактность и мгновенное появление блокирующего эффекта. Однако внутреннее трение дифференциала влияет на управляемость автомобиля. Этот дифференциал имеет сложную технологию изготовления и чувствителен к вязкости масла. Общее с заявляемым изобретением то, что использован эффект самоторможения, то есть КПД (коэффициент полезного действия) меньше нуля при окружных усилиях одного знака на выходных валах.
Известен также дифференциал межколесного привода, описанный в книге Лефарова А. Х. "Дифференциалы автомобилей и тягачей", где привод состоит из двух цилиндрических рядов. Кинематическая связь между выходными валами при неподвижном корпусе осуществления через минусовой планетарный механизм (минусовым называется планетарный механизм, центральные колеса которого вращаются в противоположные стороны при остановленном водиле, т.е. передаточное отношение больше нуля) с последовательно соединенной простой передачей. По существу, дифференциал является понижающим редуктором, обеспечивающим дифференциальный привод колес.
Известен также механизм распределения мощности, описанный в патенте RU N 2044942 по кл. F 16 H 48/20. В этом механизме имеется корпус, внутри которого установлен планетарный механизм с передаточным отношением больше нуля и водило этого планетарного механизма соединено с одним из выходных валов, а на втором выходном валу установлено центральное колесо. Этот известный механизм при установке его в транспортном средстве не распределяет момент на ведущие колеса равномерно и не исключает увеличение частоты вращения одного из колес при приложении момента к корпусу, то есть вызывает буксование колеса при разных условиях сцепления с дорогой. Смещение оси второй полуосевой шерстни создает заклинивающий эффект в зубчатом зацеплении, что создает большие распирающие усилия на венец этой шерстни.
В основу изобретения положена задача создать механизм распределения мощности для привода ведущих осей и колес транспортного средства, в котором благодаря распределению крутящего момента равномерно двумя параллельными потоками, обеспечивалось бы равномерное распределение момента на ведущие оси и колеса независимо от сцепных условий колес с дорогой, предотвращалась бы пробуксовка колес, исключалось влияние на управляемость транспортного средства, при этом механизм был бы автоматическим.
Поставленная задача решается тем, что в механизме распределения мощности для привода ведущих осей и колес транспортного средства, содержащем корпус с двумя выходными валами, планетарный механизм с передаточным отношением больше нуля, размещенный внутри корпуса и водило которого соединено с одним из выходных валов, согласно изобретению, содержится еще один планетарный механизм с передаточным отношением больше нуля, центральные колеса обоих механизмов расположены соосно и соединены параллельно, а водила образуют вращательную пару с сателлитами, венцы которых входят в зубчатое зацепление с центральными колесами, из которых одно центральное колесо первого планетарного механизма жестко соединено с корпусом и центральным колесом второго планетарного механизма, а два других центральных колеса разных планетарных механизмов соединены между собой, при этом передаточное отношение каждого планетарного механизма, при приложении момента к корпусу и неподвижных водилах выбрано таким, что обеспечиваются окружные усилия разного знака на венцах центральных колес при жестком соединении их между собой и одного знака - при соединении их кинематической цепью через промежуточное зубчатое колесо для реверсивного движения. Такая кинематическая связь двух планетарных механизмов обеспечивает распределение момента на ведущие оси и колеса равномерно двумя потоками, независимо от сцепных условий колес с дорогой, исключает увеличение частоты вращения одного из колес, действует автоматически и не влияет на управляемость транспортного средства.
Целесообразно, чтобы оба планетарных механизма имели разные передаточные отношения, обеспечивающих КПД каждого планетарного механизма меньше нуля при ведомых водилах и при жестком соединении между собой двух свободных относительно корпуса центральных колес разных планетарных механизмов, окружное усилие на их венцах должно быть разного знака при приложении момента к корпусу и неподвижных водилах. Это упрощает конструкцию и снижает габаритные размеры в осевом направлении.
Возможно, чтобы оба планетарных механизма имели одинаковые передаточные отношения, обеспечивающие КПД каждого планетарного механизма меньше нуля при ведомых водилах и при соединении между собой для реверсивного движения двух центральных колесах кинематической цепью через промежуточное зубчатое колесо, окружное усилие на их венцах должно быть одного знака при приложении момента к корпусу и неподвижных водилах. Это благоприятно распределяет нагрузку на звенья планетарных механизмов.
Возможно применение двух планетарных механизмов с одинаковыми передаточными, отношениями обеспечивающими КПД каждого механизма больше нуля при ведомых водилах. Это не исключает возможности увеличения частоты вращения одного выходного вала при большой разнице сцепных условий колеса с дорогой, но улучшает прочностные характеристики механизма распределения мощности.
Целесообразно, чтобы центральные колеса, не соединенные жестко с корпусом, имели второй зубчатый венец для соединения их между собой через промежуточное зубчатое колесо. Это повышает прочностные характеристики зубчатых зацеплений.
Возможно, чтобы сателлиты имели один или два зубчатых венца при соответствующем подборе чисел зубьев центральных колес, удовлетворяющим условию обеспечения окружных усилий разного знака на венцах центральных колес, свободных относительно корпуса, при жестком соединении их между собой и одного знака - при соединении их через промежуточное зубчатое колесо. Это расширяет возможности подбора передаточных отношений.
Целесообразно применение в механизме распределения мощности планетарных механизмов с количеством сателлитов больше одного. Это повышает прочностные характеристики зубчатых зацеплений.
Целесообразно, чтобы центральные колеса имели зубья внутреннего зацепления. Это уменьшает габариты конструкции в радиальном направлении.
Возможно использование планетарных механизмов с зубьями внешнего зацепления, но планетарные механизмы этого типа имеют большой момент инерции, что неблагоприятно отражается на изменении режимов работы.
Необходимо выходные валы соединить с водилами.
Необходимо при использовании двух планетарных механизмов со свободным водилом (планетарный механизм с тремя центральными колесами) соединить выходные валы с третьим солнечным центральным колесом с зубьями внешнего зацепления. Это упрощает конструкцию, так как водило может отсутствовать, а свободные сателлиты ограничены от перемещения только в осевом направлении.
Возможно применение двух планетарных механизмов с водилами, представляющими собой эксцентриковые валы с одним сателлитом и центральными колесами с зубьями внутреннего зацепления. Это упрощает конструкцию, но снижает прочностные характеристики и требует дополнительного устройства для устранения дисбаланса.
Возможно применение планетарных механизмов с эксцентриковыми водилами, образующими вращательные пары с сателлитами, имеющими один венец с зубьями внешнего зацепления, а второй - с зубьями внутреннего зацепления, и центральными колесами, два из которых с зубьями внутреннего зацепления, а два - с зубьями внешнего зацепления. Это значительно уменьшает габаритные размеры в осевом направлении.
В дальнейшем изложении настоящее изобретение поясняется подробным описанием конкретных вариантов его выполнения со ссылками на прилагаемые чертежи, на которых,
фиг. 1 изображает предлагаемый механизм, согласно изобретению, продольный разрез;
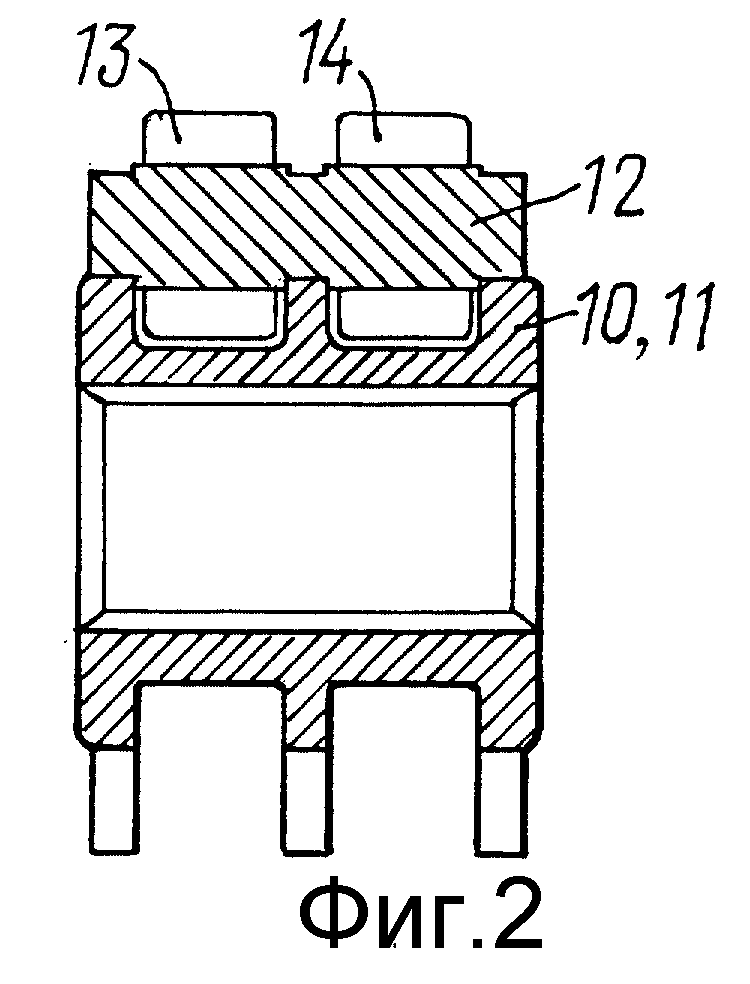
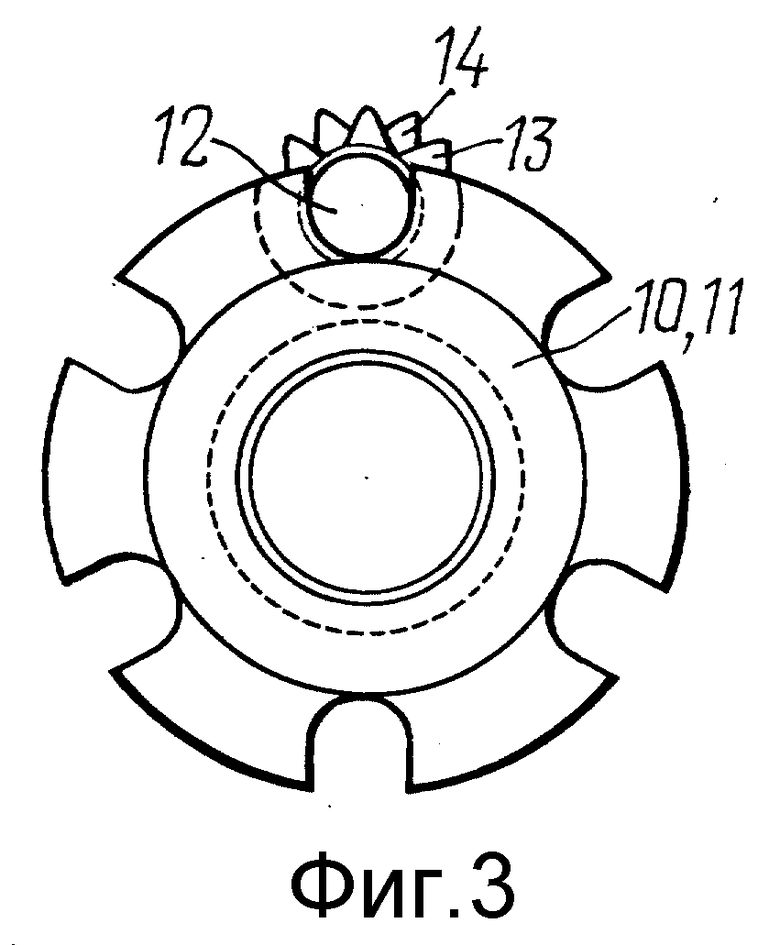
фиг. 2 - водило, продольный разрез, один из вариантов выполнения;
фиг. 3 - то же, что на фиг. 2, вид сбоку;
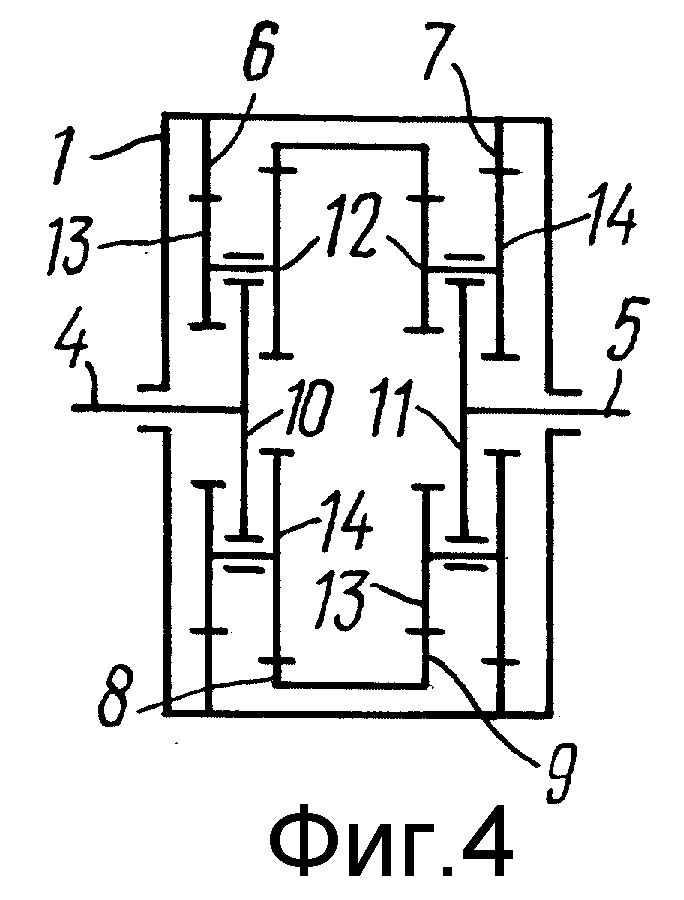
фиг. 4 - кинематическую схему механизма, изображенного на фиг. 1;
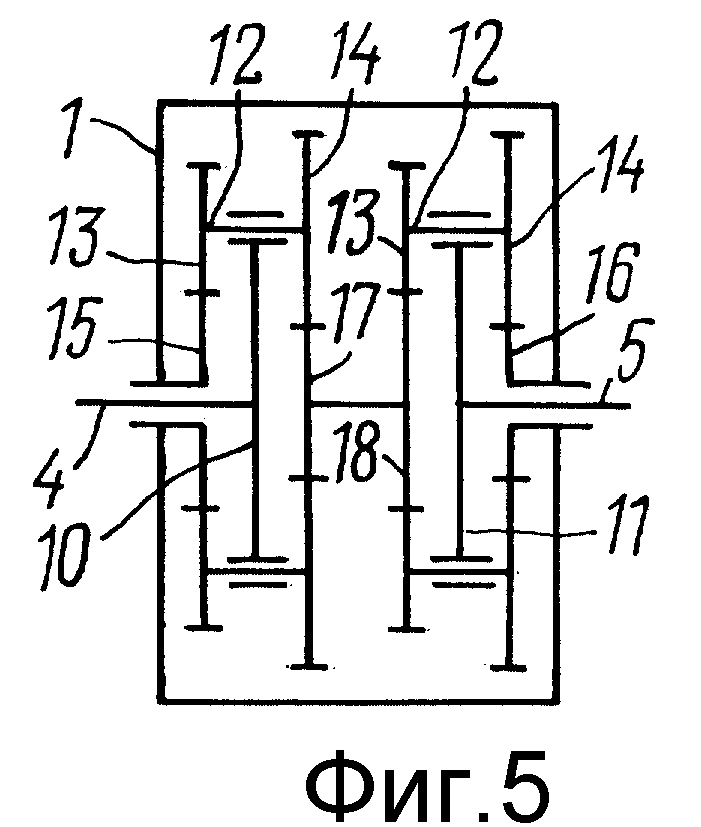
фиг. 5 - один из вариантов выполнения кинематической схемы механизма, изображенного на фиг. 1;
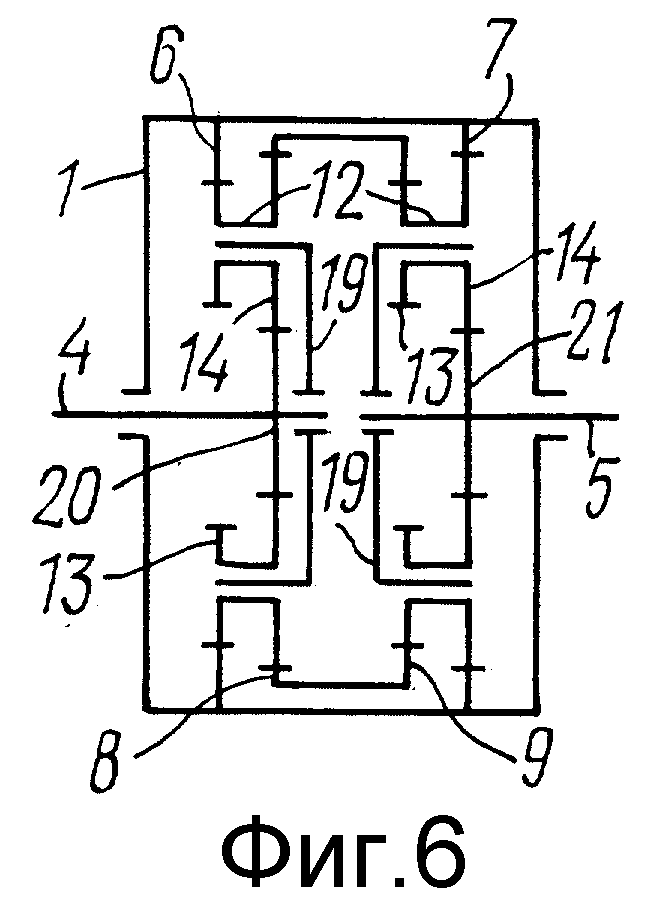
фиг. 6 - еще один вариант выполнения кинематической схемы механизма, изображенного на фиг. 1;
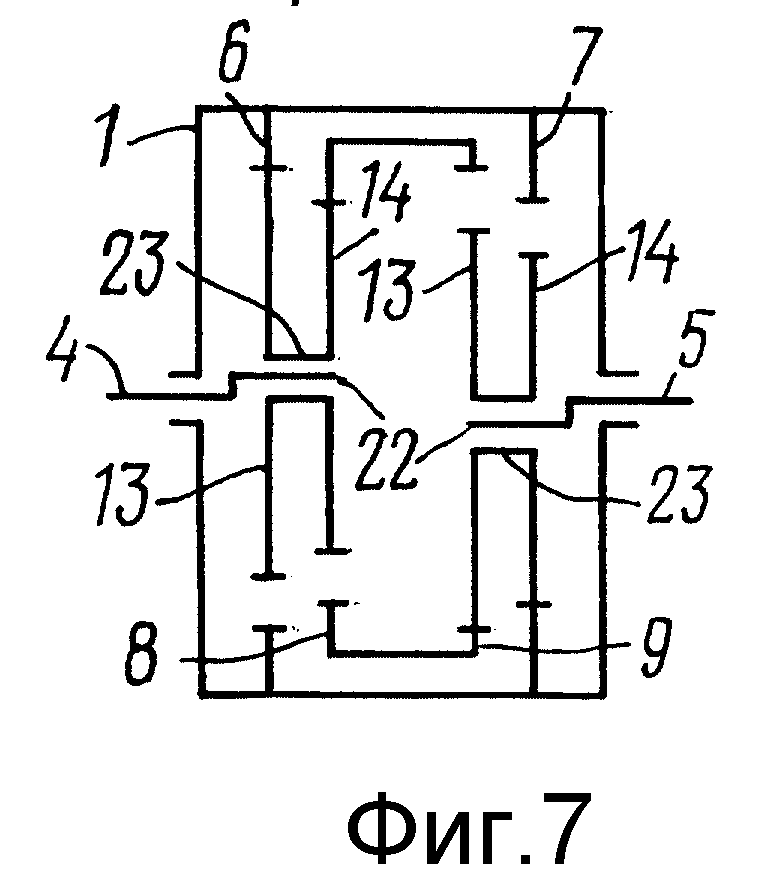
фиг. 7 - еще один вариант выполнения кинематической схемы механизма, изображенного на фиг. 1;
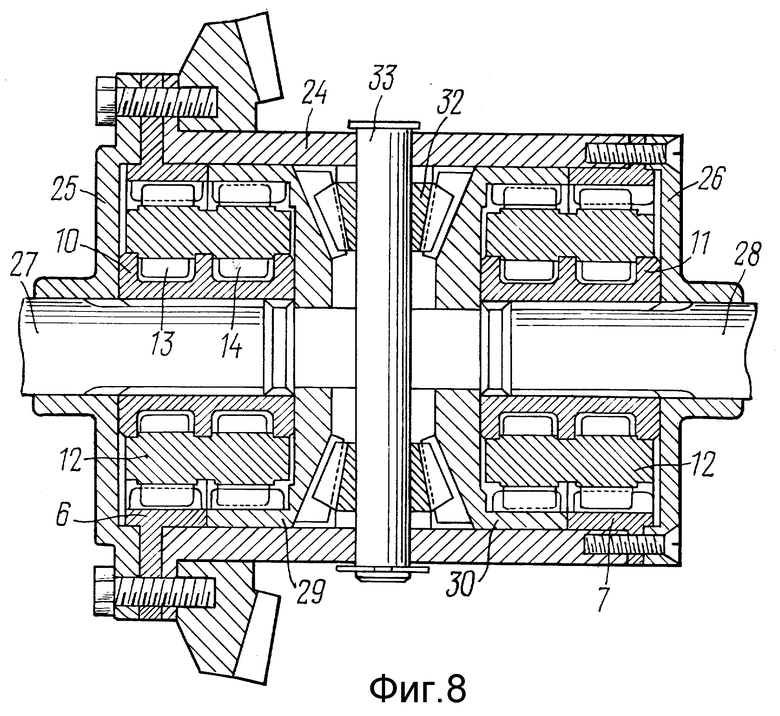
фиг. 8 - вариант выполнения предлагаемого механизма, продольный разрез;
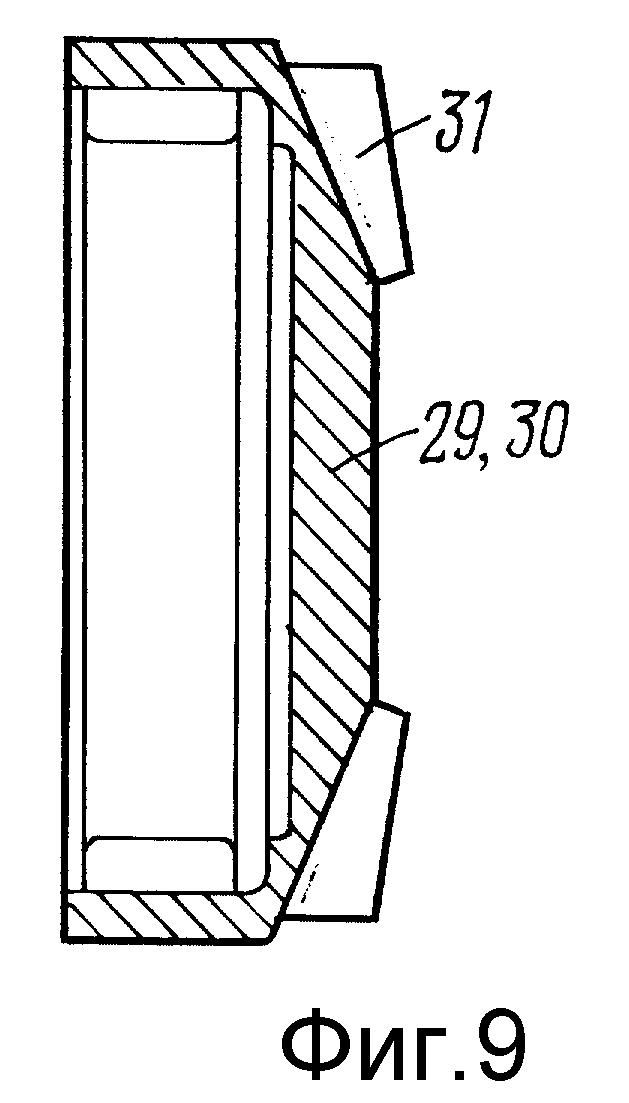
фиг. 9 - центральное колесо, в разрезе, используемое в механизме по фиг. 8;
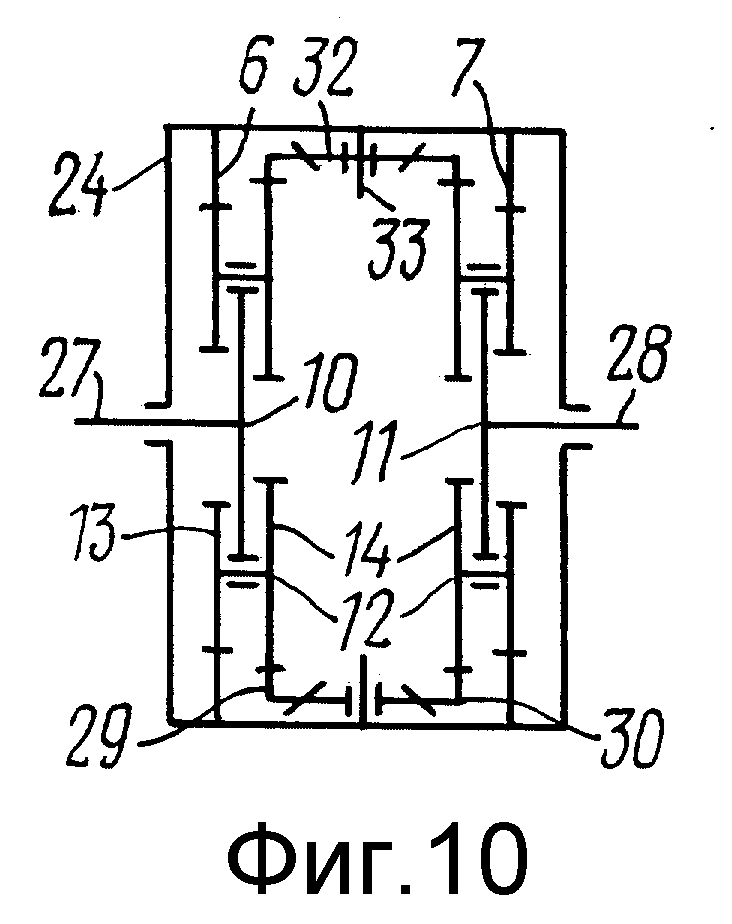
фиг. 10 - кинематическую схему механизма, изображенного на фиг. 8;
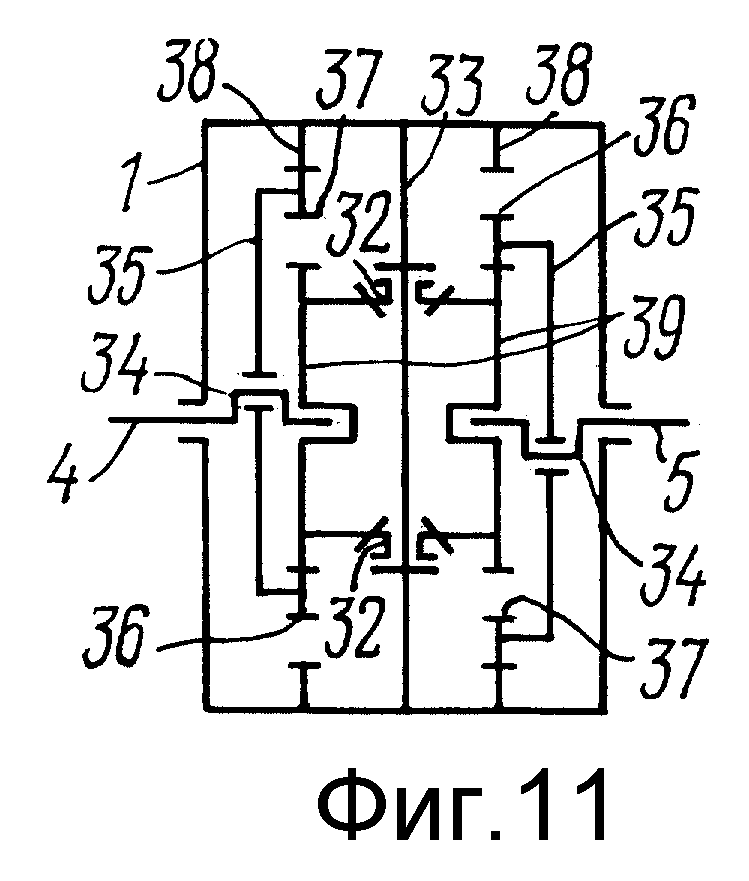
фиг. 11 - один из вариантов кинематической схемы механизма, изображенного на фиг. 8.
Предлагаемый механизм включает в себя два планетарных механизма, установленных в корпусе 1 (фиг. 1), имеющем торцевые крышки 2, 3, в которых выполнены отверстия для выходных валов 4, 5 и опорные поверхности для подшипников. Крышки 2, 3 и центральные колеса 6, 7 жестко соединены с корпусом 1, при этом одно из центральных колес 6 и 7 может быть выполнено как одно целое с корпусом 1. Венцы центральных колес 8, 9, жестко соединенных между собой, и венцы центральных колес 6, 7 имеют одинаковое количество зубьев внутреннего зацепления - двадцать семь (при этом колеса 8 и 9 выполнены как одно целое). Центральные колеса 8, 9 свободны относительно корпуса 1 и расположены между центральными колесами 6, 7. Два выходных вала 4, 5 шлицами соединены с двумя водилами 10, 11. Водило 10, 11 представляет собой втулку с тремя щеками, в каждой из которых выполнено по шесть пазов, являющихся опорными поверхностями для шести трехопорных сателлитов 12 (фиг. 2, 3) с двумя зубчатыми венцами 13, 14. Венец 13 имеет шесть зубьев, венец 14 - семь зубьев. Зубья центральных колес 6, 7, 8, 9 и зубья венцов 13, 14 сателлитов 12 выполнены со смещением, обеспечивающим одинаковое межосевое расстояние. Зубчатые венцы 14 трех из шести сателлитов 12 каждого планетарного механизма смещены при изготовлении относительно зубчатого венца 13 на полшага для обеспечения условия сборки. Зубчатый венец центрального колеса 6 первого планетарного механизма, жестко соединенного с корпусом 1, составляет кинематическую пару с шестизубыми венцами 13 сателлитов первого планетарного механизма. Зубчатый венец центрального колеса 7 (фиг. 1) второго планетарного механизма, жестко соединенного с корпусом, составляет кинематическую пару с семизубыми венцами 14 сателлитов второго планетарного механизма. Зубчатый венец центрального колеса 8 первого планетарного механизма составляет кинематическую пару с семизубыми венцами 14 сателлитов первого планетарного механизма. Зубчатый венец центрального колеса 9 второго планетарного механизма, жестко соединенного с центральным колесом 8, составляет кинематическую пару с шестизубыми венцами 13 сателлитов второго планетарного механизма. При ведущих водилах и неподвижных центральных колесах 6, 7 у первого планетарного механизма передаточное отношение равно шести, у второго семи. Суммарные потери в зубчатых зацеплениях и опорах сателлитов каждого планетарного механизма при ведомом водиле и неподвижном центральном колесе больше единицы, то есть КПД каждого планетарного механизма меньше нуля.
Работает механизм следующим образом.
При приложении момента к корпусу 1 (фиг. 4), при окружных усилиях на выходных валах 4, 5 одного знака, опорными звеньями планетарных механизмов являются центральные колеса 8, 9, жестко соединенные между собой. Так как передаточные отношения планетарных механизмов отличаются на единицу, то окружное усилие на венцах центральных колес 8, 9 разного знака, но, так как они жестко соединены между собой, то остаются неподвижными относительно корпуса 1. КПД при ведущих центральных колесах 6, 7 и неподвижных центральных колесах 8, 9 меньше нуля и корпус 1 вращается вместе с выходными валами 4, 5 как одно целое. Момент от корпуса 1 независимо от сцепных условий колес с дорогой передается двумя параллельными потоками через венцы центральных колес 6, 7, венцы 13 сателлитов одного планетарного механизма и венцы 14 другого планетарного механизма на опорные поверхности водил 10, 11, соединенных с выходными валами 4, 5.
При приложении к одному из выходных валов 4, 5 дополнительного момента противоположного знака относительно другого выходного вала (например, при повороте транспортного средства) водило из ведомого становится ведущим (КПД при ведущих водилах больше нуля), опорными звеньями становятся центральные колеса 6, 7, жестко соединенные с корпусом 1. Знаки окружного усилия на венцах жестко соединенных между собой центральных колес 8, 9 уравниваются, и они начинают вращаться относительно корпуса 1. Происходит перемещение относительно корпуса 1 внутренних звеньев планетарных механизмов в кинематической цепи, соединяющей два выходных вала 4, 5. Механизм распределения мощности в этом случае работает как дифференциал, не оказывая влияния на управление транспортного средства.
На фиг. 5, 6, 7 изображены принципиальные кинематические схемы планетарных механизмов и варианты их соединения между собой. Так, например, на фиг. 5 изображен механизм, в котором центральные колеса 15, 16, 17 и 18 выполнены с зубьями внешнего зацепления. На фиг. 6 изображен вариант, в котором применены предлагаемые планетарные механизмы со свободными водилами 19, третьими центральными солнечными колесами 20 и 21, имеющими зубья внешнего зацепления. На фиг. 7 изображен вариант, в котором центральные колеса 6, 7, 8, 9 имеют зубья внутреннего зацепления, функцию водила выполняет эксцентриковый вал 22, образующий вращательную пару с сателлитом 23, при этом в каждом планетарном механизме по одному сателлиту 23.
Описанные выше варианты выполнения работают аналогично механизму, изображенному на фиг. 1.
На фиг. 8 изображен еще один вариант выполнения предлагаемого механизма. Согласно этому варианту предлагаемый механизм содержит два планетарных механизма, установленных в корпусе 24, имеющем торцевые крышки 25, 26, в которых выполнены отверстия для выходных валов 27, 28 и опорные поверхности для подшипников. Крышки 25, 26 и центральные колеса 6, 7 жестко соединяются с корпусом 24, при этом одно из центральных колес 6 или 7 может быть выполнено как одно целое с корпусом 24. Центральные колеса 29, 30 имеют по два венца, один из которых 31 (фиг. 9) с коническими зубьями входит в кинематическую пару для реверсивного движения с венцом зубчатого колеса 32 (фиг. 8) с коническими зубьями, ось 33 которого закреплена в корпусе 24. Венцы с зубьями внутреннего зацепления центральных колес 6, 7, 29, 30 имеют одинаковое количество зубьев - двадцать семь. Два выходных вала 27, 28 шлицами соединены с двумя водилами 10, 11. Водила 10, 11 представляют собой втулку с тремя щеками, в каждой из которых выполнено по шесть пазов, являющихся опорными поверхностями для шести трехопорных сателлитов 12 с двумя зубчатыми венцами 13, 14. Венец 13 имеет шесть зубьев, венец 14 - семь зубьев. Зубья центральных колес 6, 7, 29, 30 и зубья венцов 13, 14 сателлитов 12 выполнены со смещением, обеспечивающим одинаковое межосевое расстояние. Зубчатые венцы 14 трех из шести сателлитов каждого планетарного механизма смещены при изготовлении относительно зубчатого венца 13 на полшага для обеспечения сборки. Зубчатые венцы центральных колес 6, 7, жестко соединенных с корпусом 24, составляют кинематические пары с шестизубыми венцами 13 сателлитов первого и второго планетарного механизма. Зубчатые венцы с зубьями внутреннего зацепления центральных колес 29, 30 составляют кинематические пары с семизубыми венцами 14 сателлитов 12 первого и второго планетарного механизма. При ведущих водилах и неподвижных центральных колесах 6, 7 у первого и второго планетарного механизма передаточное отношение равно шести. Суммарные потери в зубчатых зацеплениях и опорах сателлитов каждого планетарного механизма при ведомом водиле и неподвижном центральном колесе больше единицы, то есть КПД каждого планетарного механизма меньше нуля.
Работает механизм следующим образом.
При приложении момента к корпусу 24 (фиг. 10), при окружных усилиях на выходных валах 27, 28 одного знака, опорными звеньями планетарных механизмов являются центральные колеса 29, 30, соединенные между собой кинематической цепью через промежуточное зубчатое колесо 32. Так как передаточные отношения планетарных механизмов одинаковы, то окружные усилия на венцах центральных колес 29, 30 одного знака, но эти колеса связаны кинематической цепью через промежуточное зубчатое колесо 32 для реверсивного движения и не могут вращаться относительно корпуса 24 в одну сторону, поэтому остаются неподвижными относительно корпуса 24. КПД при ведущих центральных колесах 6, 7, неподвижных центральных колесах 29, 30 и ведомых водилах меньше нуля, и корпус 24 вращается вместе с выходными валами 27, 28 как одно целое. Момент от корпуса 24 передается, независимо от сцепных условий колес с дорогой, двумя параллельными потоками на опорные поверхности водил 10, 11, соединенных с выходными валами 27, 28.
При приложении к одному из выходных валов 27, 28 дополнительного момента противоположного знака относительно другого выходного вала (например, при повороте транспортного средства) водило из ведомого становится ведущим, а КПД при ведущих водилах больше нуля, опорными звеньями становятся центральные колеса 6, 7, жестко соединенные с корпусом 24 и между собой. Знаки окружных усилий на венцах центральных колес 29, 30, соединенных кинематической цепью через промежуточное зубчатое колесо 32, становятся разными, и они вращаются в противоположном относительно друг друга направлении. Происходит перемещение относительно корпуса 24 внутренних звеньев планетарных механизмов в кинематической цепи, соединяющей два выходных вала 27, 28. Механизм распределения мощности в этом случае работает как дифференциал, не оказывая влияния на управление транспортного средства.
На фиг. 11 изображена принципиальная кинематическая схема варианта выполнения механизма, изображенного на фиг. 8. В этом варианте используются два планетарных механизма, в которых функцию водила выполняет эксцентриковый вал 34, образующий вращательную пару с сателлитами 35, имеющими один венец 36 с зубьями внешнего зацепления, а второй 37 с зубьями внутреннего зацепления, и имеет центральные колеса 38, 39, из которых два колеса 38 имеют зубья внутреннего зацепления, а два колеса 39 - внешнего зацепления.
Описанный вариант выполнения предлагаемого механизма работает аналогично механизму, изображенному на фиг. 8.
В исполнении как первого, так и второго варианта, а также других вариантов по кинематическим схемам, изображенным на фиг. 5, 6, 7 и 11, возможны другие комбинации зубьев в кинематических парах центральных колес с сателлитами. Например, можно, применяя при изготовлении соответствующее корригирование зубьев, сателлит выполнить одновенцовым при разных количествах зубьев на центральных колесах. Число зубьев должно удовлетворять условию: при жестком соединении между собой центральных колес, свободных относительно корпуса, передаточное отношение должно обеспечить окружное усилие на их венцах разного знака при приложении момента к корпусу и неподвижных водилах и одного знака при соединении их кинематической цепью через промежуточное зубчатое колесо.
Конструкция с промежуточным зубчатым колесом, расположенном на оси, соединенной с корпусом (фиг. 8), может быть использована во всех вариантах механизма распределения мощности по кинематическим схемам, изображенным фиг. 5, 6, 7.
Рассмотренные конкретные варианты выполнения механизма распределения мощности и варианты показанные схематично на фиг. 4, 5, 6, 7, 10, 11, не являются исчерпывающими. Создание работоспособных конструкций возможно также с использованием волновых, зубчато-цевочных и с параллелограммным приводом планетарных механизмов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2156902C1 |
| ДИФФЕРЕНЦИАЛ | 2008 |
|
RU2397390C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2014 |
|
RU2590797C2 |
| ПЛАНЕТАРНЫЙ ЗУБЧАТЫЙ МЕХАНИЗМ С ДВОЙНЫМИ САТЕЛЛИТАМИ | 2008 |
|
RU2355923C1 |
| ИНЕРЦИОННЫЙ АВТОМАТИЧЕСКИЙ ИМПУЛЬСИВНЫЙ ВАРИАТОР | 2002 |
|
RU2212575C1 |
| ЭЛЕКТРОМОБИЛЬНЫЙ ВАРИАТОР | 1998 |
|
RU2175415C2 |
| ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2007 |
|
RU2345257C1 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2143349C1 |
| КОНИЧЕСКИЙ ДИФФЕРЕНЦИАЛ С ВИНТОВОЙ БЛОКИРОВКОЙ | 1993 |
|
RU2076967C1 |
| Привод распределителя шихты загрузочного устройства доменной печи | 1987 |
|
SU1452843A1 |
Изобретение относится к машиностроению. Механизм распределения мощности состоит из двух расположенных соосно и соединенных параллельно плюсовых планетарных механизмов. Центральное колесо первого планетарного механизма жестко соединено с корпусом и с центральным колесом второго планетарного механизма. Два других центральных колеса разных планетарных механизмов соединены между собой. Передаточное отношение каждого планетарного механизма при приложении момента к корпусу и неподвижных водилах выбрано таким, что обеспечиваются окружные усилия разного знака на венцах центральных колес при жестком соединении их между собой и одного знака - при соединении колес кинематической цепью через промежуточное зубчатое колесо для реверсивного движения. Такое выполнение механизма позволяет распределять крутящий момент на ведущие оси и колеса равномерно двумя параллельными потоками независимо от сцепных условий колес с дорогой, предотвратить пробуксовку колес и исключить влияние на управляемость транспортного средства. 12 з.п.ф-лы, 11 ил.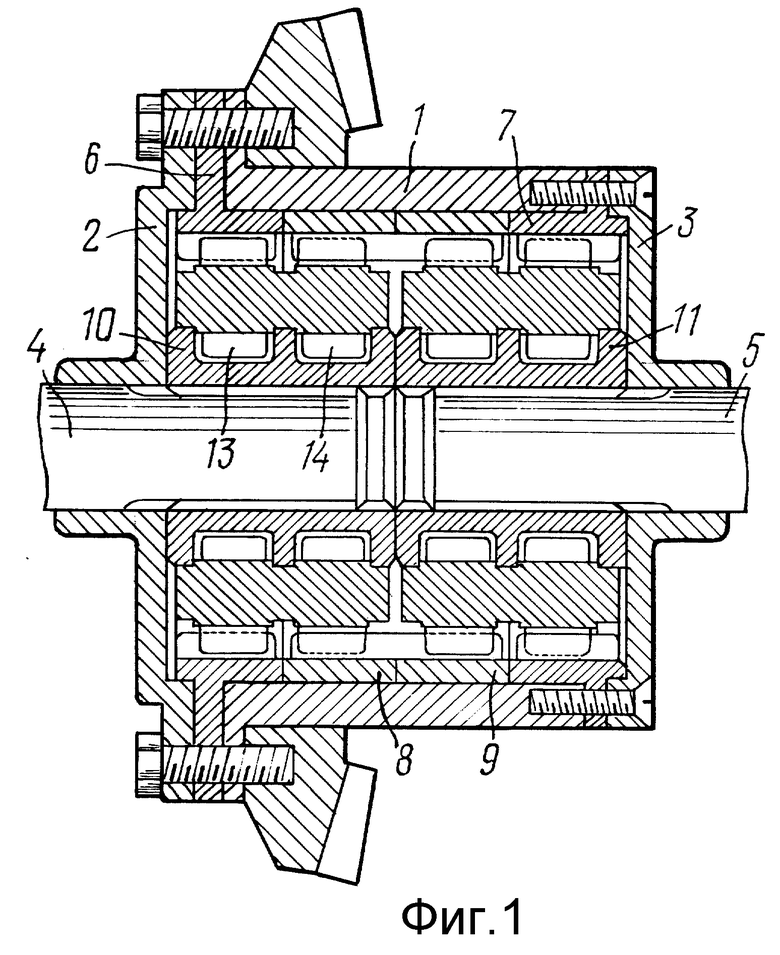
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2044942C1 |
| US 5443430 A, 22.08.95, F 16 H 48/10 | |||
| ПЛАСТЫРЬ МЕСТНОГО ДЕЙСТВИЯ С НЕСТЕРОИДНЫМИ АНТИРЕВМАТИЧЕСКИМИ СРЕДСТВАМИ, СОДЕРЖАЩИМИ КИСЛОТНУЮ ГРУППУ | 1999 |
|
RU2212232C2 |
| GB 2211901 A, 12.07.89, F 16 H 1/38 | |||
| Функциональный преобразователь | 1983 |
|
SU1108442A1 |
| СОСТАВ ДЛЯ БОРЬБЫ С ХЛОРОЗОМ И СТИМУЛИРОВАНИЯ РОСТА ОВОЩНЫХ КУЛЬТУР | 2002 |
|
RU2211564C1 |

