Изобретение относится к области приборостроения и может быть использовано для исследования состояния корпусов и агрегатов затонувших судов, изучения морского дна и иных подводных работ, требующих проникновения в проемы, щели, разломы и передачи информации на поверхность.
Известна система обнаружения и автоматического подъема затонувшего судна, содержащая подводный аппарат, оснащенный электронным блоком и лебедкой с тросом, на конце которого закреплен буй (см. авторское свидетельство N 637298, B 63 C 7/26, 1977, патент Франции N 2219659, B 63 C 7/26, 1974 или патент США N 3559607, B 63 C 7/02, 1971).
Недостатком известного аппарата являются ограниченные функциональные возможности: аппарат не может совершать горизонтального перемещения под водой, а его вертикальное перемещение не является автономным.
Известны подводные аппараты, содержащие корпус с механизмом задания плавучести (буй), в полости которого расположен электронный блок, подключенный к одному концу сигнального кабеля, размещенного на катушке (см. патент Франции N 2046690, B 63 C 7/00, авторское свидетельство N 1254657, B 63 B 21/66).
Однако эти аппараты не могут совершать сложных маневров, а дальность их действия невелика. Это существенно ограничивает возможность использования подобных аппаратов в качестве подводного робота.
Известен инспекционный подводный аппарат, содержащий корпус, двигатели, электронный блок приема-передачи и систему сонирования (см. проспект фирмы "Bentech", Норвегия). Питание подается на аппарат по кабелю, при этом катушка размещена на судне или на берегу.
Этот аппарат имеет значительные массу и габариты и недостаточный радиус действия. Это связано с необходимостью преодоления значительного сопротивления кабеля при удалении подводного аппарата от лебедки с кабелем и, особенно, при спуске аппарата на значительную глубину. Помимо этого, силовой кабель препятствует совершению аппаратом сложных маневров. И, наконец, к недостаткам известного аппарата следует отнести недостаточную информативность осмотра из-за отсутствия телевизионной системы.
Наиболее близким к предложенному является телеуправляемый осмотровый подводный аппарат, содержащий корпус, в полости которого размещены двигатели, телекамера, осветители и электронный блок приема сигналов управления и передачи телевизионной и измерительной информации (см. "Подводная техника морских нефтепромыслов". - Л., Судостроение, 1980, с. 116-118). Питание и сигналы управления подаются по кабелю, при этом его катушка размещена на подвижной раме-носителе, погружаемой на грунт дна.
Поскольку кабель является силовым и катушка размещена на раме-носителе, данному аппарату свойственны основные недостатки предыдущего: ограниченная маневренность ввиду подавляющего влияния кабеля, значительные масса и габариты, а главное недостаточный радиус действия. При этом снижение сечения кабеля за счет уменьшения мощности двигателей практически не приносит увеличения маневренности и дальности, поскольку двигатели все равно должны обеспечивать преодоление натяжения кабеля и сноса, обусловленного его гидродинамическим сопротивлением.
Таким образом, техническим результатом, ожидаемым от использования изобретения, является повышение маневренности подводного аппарата при одновременном увеличении радиуса его действия, создание пилотируемого малогабаритного аппарата, способного проникать в отсеки затонувших судов и передавать исчерпывающую информацию о состоянии их агрегатов.
Указанный результат достигается тем, что известный телеуправляемый осмотровый аппарат, содержащий корпус, в полости которого расположены двигатели, телекамера, осветители и электронный блок приема сигналов управления и передачи телевизионной и измерительной информации, снабжен паковкой соединительного кабеля, которая размещена в полости корпуса, при этом корпус выполнен с осевым кормовым отверстием, в котором соосно с корпусом расположена направляющая для указанного кабеля.
Кроме того, подводный аппарат может быть снабжен автономным источником питания, а соединительный сигнальный кабель выполнен оптоволоконным.
При этом оптоволоконный кабель может быть выполнен одножильным с концевыми разделителями света.
Целесообразно направляющую для кабеля выполнить с механизмом поворота оси.
Рекомендуется, чтобы соединительный кабель в паковке был намотан с подкручиванием, противоположным направлению намотки.
Кроме того, аппарат целесообразно снабдить датчиком длины смотанного участка соединительного кабеля.
На фиг. 1 показан схематично продольный разрез подводного аппарата; на фиг. 2 - сигнальный кабель с концевыми разделителями света; на фиг. 3 приведена блок-схема предлагаемого устройства; на фиг. 4 - 6 (фиг. 6 является видом сверху устройства, показанного на фиг. 5) схематично изображены варианты выполнения направляющей с механизмом поворота оси; фиг. 7 и 8 иллюстрируют возможные варианты намотки с подкручиванием и форму витков паковки.
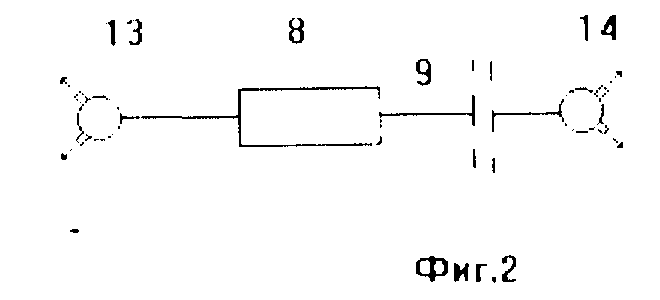
Устройство на фиг. 1 содержит корпус 1, в полости которого размещена телекамера 2, источники света 3 и электронный блок 4. В корпусе 1 размещен также механизм 5 задания плавучести, в частности, механизм дозированного сброса плавучести. В качестве привода могут быть использованы два погружных электродвигателя 6 с винтами-движителями 7 (а при необходимости, и с рулями) или струйно-импульсные двигатели. Паковка 8 соединительного кабеля 9 размещена в кормовой полости корпуса 1 соосно с ним. Кабель 9 соединяет элементы, узлы и блоки подводного аппарата с элементами, узлами и блоками, находящимися на берегу или борту судна. Аппарат может быть снабжен автономным источником питания 12. В этом случае кабель 9 выполняется исключительно сигнальным, т.е. без силовой части и служит только для приема-передачи информации и сигналов управления. В качестве сигнального кабеля 9 или сигнальной части кабеля 9 может быть использовано оптоволокно. В этом случае удобно использовать двухчастотный метод приема и передачи информации, при котором сигналы на подводный аппарат и с него передаются по одному волокну, но на разных частотах. При этом на концах кабеля 9 устанавливаются разделители света 13 и 14 (фиг. 2).
Блок 5 может быть снабжен в виде толкателя с набором шариков плавучести. По сигналу оператора, передаваемому на борт подводного аппарата через кабель 9 и электронный блок 4, последний формирует управляющий сигнал, и толкатель выталкивает очередной шарик, обеспечивая снижение плавучести аппарата на определенную величину.
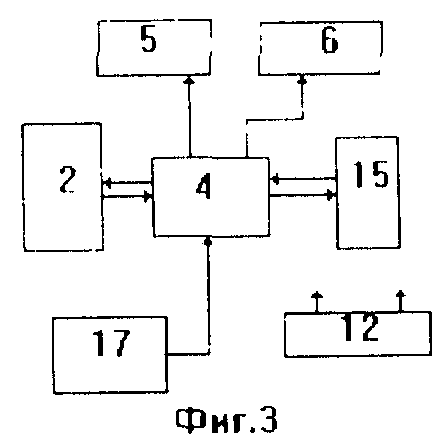
На фиг. 3 показаны связи блока 4 с телекамерой 2, пультом управления 15, находящимся на поверхности у оператора, механизмом 5 и другими блоками. Реализация этих связей (шина проводник) и вид передаваемых по ним сигналов определяются выполнением блока 2, механизма 5, кабеля 9, блока 4. Следует подчеркнуть, однако, что реализация всей схемы управления подводным аппаратом и обменом информации с ним и, в частности, выполнение блока 4, не является объектом настоящего изобретения. В то же время, подобные системы управления и обмена информацией известны и в настоящем предложении может быть использована любая из известных целиком или частично: известный электронный блок механизма выталкивания плавучести, датчик длины смотанного участка и т. п.
Позицией 16 на фиг. 1 обозначен прозрачный носовой отсек корпуса 1.
Датчик 17 длины смотанного участка (фиг. 3) может быть выполнен механическим с приводом от паковки 8 или электромагнитным с приводом от сматывающегося кабеля 9 (в последнем случае его можно разместить в направляющей 10), оптическим (например, в виде линейки оптически связанных свето- и фотодиодов, между которыми расположена паковка, так что оставшаяся часть намотки является экраном или индикатором.
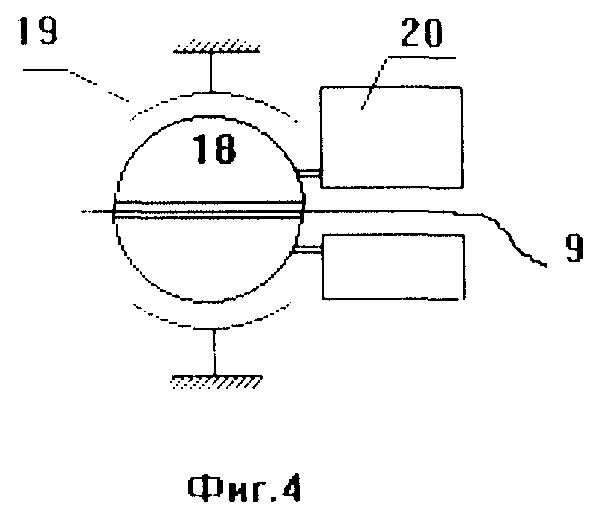
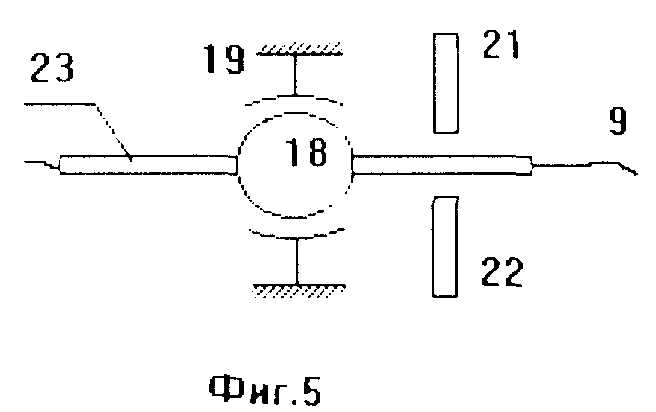
Механизм поворота оси направляющей 10 может быть выполнен в виде шарового шарнира с подвижной 18 и неподвижной 19 частями (фиг. 4). Кабель 9 размещен в диаметральном отверстии части 18, кинематически соединенной со стабилизатором 20. При этом часть 18 выполняет роль направляющей. Вместо стабилизаторов 20 могут быть использованы толкатели 21 и 22 (фиг. 5, 6), между которыми размещены направляющая трубка 23, размещенная в диаметральном отверстии части 18 шарового шарнира. Вилка 24 осуществляет кинематическую связь трубки 23 с приводом 25, установленным на толкателе 21, который вместе с толкателем 22 образует щелевой зажим.
На фиг. 7 позицией 26 обозначен виток кабеля 9. Стрелка показывает направление укладки и подкручивания кабеля вдоль его оси. Угловая величина упругого подкручивания равна дуге укладки. Вариант подкручивания за счет укладки показан на фиг. 8. Позиция 27 обозначает выход линии пересечения витков паковки, выполненных "восьмеркой".
Устройство работает следующим образом.
Оператор передает сигналы управления с пульта 15 по кабелю 9 на блок 4, откуда они поступают на двигатели 6, привод телекамеры 2, источники света 3 и механизм 5, что позволяет управлять движением подводного аппарата. Информация с выхода телекамеры 2 передается в блок 4, откуда по кабелю 9 поступает в приемное устройство оператора.
При движении робота кабель 9 (фиг. 1) под действием гидродинамического сопротивления воды свободно сматывается с паковки 8 с минимальным усилием. При этом выпускание кабеля 9 происходит по касательной к траектории движения аппарата, что исключает влияние кабеля 9 на мореходные свойства подводного аппарата.
Наличие на борту аппарата источника питания 12 позволяет отказаться от использования кабеля 9 для энергоснабжения подводного аппарата. Облегченный кабель при движении аппарата остается в воде в виде "следа" - траектории движения аппарата, если его плавучесть близка к нулю (например, одномодовый оптоволоконный кабель в полиэтиленовой оболочке).
Механизм поворота оси направляющей 10 способствует дальнейшему снижению нежелательного воздействия, оказываемого кабелем 9 на маневренность аппарата. Пассивный (фиг. 4) или активный (фиг. 5) механизм ориентирует ось выходного отверстия направляющей 10 по касательной к траектории движения.
Работа отдельных блоков и механизмов заявленного устройства осуществляется в соответствии с общеизвестными сведениями и рекомендациями. Например, для двухкоординатного перемещения конца трубки 23 приводят в движение толкатели 21 и 22 в направлении, перпендикулярном оси трубки 23 (см. фиг. 5), и вилку 24 в направлении стрелки (фиг. 6).
Вместе с предлагаемым размещением паковки 8 с кабелем 9 и использованием оптоволоконного кабеля (стандартный одножильный оптоволоконный кабель в защитной полиэтиленовой оболочке диаметром от 0,15 до 0,2 мм имеет нулевую плавучесть, выдерживает практически любые давления и в дуплексном режиме способен передавать изобретения в телевизионном стандарте в одну сторону и команды управления - в другую) все это обеспечивает создание малогабаритного телеуправляемого робота с радиусом действия до 75 м, рабочей глубиной до 2000 м и ресурсом около 2 часов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ С УСТРОЙСТВОМ ДЛЯ ОБЕСПЕЧЕНИЯ ЕГО МАНЕВРЕННОСТИ | 2000 |
|
RU2163556C1 |
| ПРИТАПЛИВАЕМЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ИЗМЕРИТЕЛЬНЫХ И ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2011 |
|
RU2468959C1 |
| Маневровый телеуправляемый подводный аппарат | 2020 |
|
RU2751727C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
Использование: для исследования состояния корпусов и агрегатов затонувших судов, изучения морского дна и иных подводных работ, требующих проникновения в проемы, щели, разломы и передачи информации на поверхность. Сущность изобретения: подводный аппарат содержит корпус с механизмом задания плавучести. В полости корпуса расположен электронный блок, подключенный к одному концу сигнального кабеля, размещенного на катушке. Подводный аппарат снабжен двигателем и блоком слежения, выход которого соединен с входом электронного блока. Корпус выполнен с осевым кормовым отверстием. Катушка размещена на оси корпуса, в его кормовой части, а сигнальный кабель размещен на катушке с возможностью свободного сматывания с ее внутренней части через кормовое отверстие корпуса. Техническим результатом изобретения является повышение маневренности подводного аппарата при одновременном увеличении радиуса его действия. 5 з.п.ф-лы, 8 ил.
| Боровиков П.А | |||
| и др | |||
| Подводная техника морских нефтепромыслов.-Л.: Судостроение, 1980, с.116-118. |
