Изобретение относится к подводному судостроению, а именно к малогабаритным телеуправляемым подводным аппаратам. (МТПА), в частности к управляемым по кабелю связи самоходным МТПА. предназначенным преимущественно для осмотра подводных объектов и сбора подводных образцов.
Известен телеуправляемый необитаемый подводный аппарат (ТИПА) «Dolphin-3К», разработанный в Японии центром JAMSTEC. с глубиной погружения 3300 м («Последние разработки японских фирм в области судостроения и создания аппаратуры для подводных работ и исследований. Технический бюллетень. Токио. Торгпредство СССР, 1988 г. [1]). ТИПА имеет рамную конструкцию, в носовой части размещены стереотелекамеры со светильниками, курсовой гидролокатор, два манипулятора снабженные захватами, причем манипуляторы имеют пять и семь степеней свободы соответственно, навесной контейнер для сбора образцов, установленный в носовой части подводного аппарата, и блок плавучести. Управление и передача информации осуществляются по кабель - тросу длиной 5000 м с волоконно-оптической линией связи. Электрогидравлическая движительная система включает шесть движителей, обеспечивая маршевую, вертикальную и лаговую скорости. Подводный аппарат связан по кабель - тросу с пультом управления, который соединен с цветным монитором.
Подводный аппарат предназначен для работы на больших глубинах. С его помощью можно доставлять на дно или поднимать грузы массой до 200 кг. Используется преимущественно для изучения минеральных ресурсов океана, в том числе кобальтовых образований и гидротермальных отложений. Данный подводный аппарат технически сложно и экономически нецелесообразно применять на малых глубинах.
Известен ТИПА «Обзор-600» (www.tetis-pro.ru [2]). содержащий раму, движители, гидролокатор кругового обзора, видеокамеры и манипулятор «схват». ТИПА соединен с судном-носителем кабелем, по которому передаются команды управления, информация от датчиков и видеосигнал. Этот ТИПА позволяет обнаружить подводные объекты, передать видеоизображения и выполнить подводно-технические работы в объеме возможностей манипулятора «схват». Подводный аппарат работает па небольших глубинах до 600 метров.
К недостаткам ТИПА [2] следует отнесл и то, что он имеет ограниченные возможности при выполнении подводно-технических работ по сбору подводных образцов и их подъему на поверхность. Манипулятор подводного аппарата может взять только один образец и может поднять его на судно-носитель только при подъеме самого ТИПА, т.к. в его конструкции отсутствует контейнер для сбора образцов. Оператору вновь опустить подводный аппарат в ту же точку за следующим образцом очень сложно.
Известен осмотровый телеуправляемый необитаемый подводный аппарат «Калан-500». (www.bnti.ru [3]). содержащий корпус, движители, гидролокатор секторного обзора, светильники, видеокамеры и малогабаритный манипулятор. ТИПА соединен с судном-носителем кабелем, по которому передаются команды управления, информация от датчиков и видеосигнал. Данный ТИПА позволяет проводить осмотровые и инспекционные работы на подводных объектах, передавать видеоизображения и осуществлять подъем объектов вместе с подъемом на поверхность самого аппарата. Подводный аппарат работает на глубинах до 500 метров.
Известен миниатюрный телеуправляемый подводный аппарат (ТПА) «SeaBotix», (www.seabotix.ru [4]), содержащий корпус из высокопрочного пластика, четыре движителя, гидроакустическую аппаратуру, светильник, видеокамеры и манипулятор. ТПА соединен с судном-носителем кабелем, по которому передаются команды управления, информация от датчиков и видеосигнал. Данный ТПА позволяет проводить поиск подводных объектов и выполнение осмотровых и обследовательских работ под водой в прибрежных морских или внутренних водах, передавать видеоизображения и осуществлять подъем одного предмета одновременно с подъемом самого подводного аппарата. Подводный аппарат работает на небольших глубинах до 300 метров.
Известные подводные аппараты «Калан-500» и «SeaBotix» имеют тот же недостаток, что и известный «Обзор-600», а именно ограниченные технологические возможности при выполнении подводно-технических работ по сбору подводных образцов и их подъему на поверхность, т.к. в конструкциях этих известных подводных аппаратов отсутствует поворот манипулятора в вертикальной плоскости.
Известен также малогабаритный телеуправляемый подводный аппарат фирмы Seaeye «ФАЛКОН» (www.seaeye.com. www.tnpa.ru/falkon.htm [5]). Подводный аппарат содержит раму модульной конструкции, выполненную из полипропилена, движители горизонтального и вертикального хода. Электронные компоненты подводного аппарата размещены в прочных герметичных контейнерах. Кроме того, «ФАЛКОН» содержит светильники, обзорную и стационарную черно-белую видеокамеры, датчики глубины и температуры, компенсаторы давления, блок плавучести, установленный в верхней части подводного аппарата, манипуляционный модуль, включающий снабженный схватом манипулятор и герметичный привод. Манипулятор установлен на выходном валу привода. Подводный аппарат снабжен надводным модулем управления, который состоит из пульта управления, источника электропитания, блока отображения видеоинформации. Подводный аппарат соединен с надводным модулем посредством кабель - троса (кабель связи).
Однако выполнение одной из функциональных задач данным подводным аппаратом затруднено, а именно проведение подводно-технических работ по сбору подводных образцов и подъему их на поверхность. Отсутствие в нем контейнера для сбора образцов не позволяет выполнять многократный сбор подводных образцов без подъема подводного аппарата на поверхность. Кроме того, отсутствие видеокамеры у манипулятора и недостаточный угол обзора обзорной видеокамеры не позволяют производить детальный обзор подводного пространства в широком диапазоне угла зрения с одновременным обзором процесса сбора образцов, находящихся на дне.
Аналогичные недостатки имеют, также известные подводные аппараты (заявка US №2007283871 А1. 13.12.2007 [6], патент US №4721055 А, 26.01.1988 [7], заявка KR №20030088796 А. 20.11.2003 [8], патент RU №2104210 С1, 10.02.1998 [9]).
Известен ТПА патент RU №2127207 6В 63С 11/48 [10], содержащий корпус, катушку с кабелем, электродвигатель. Аппарат снабжен электронным блоком управления, соединенным с кабелем, а также электродвигателем с винтом, обеспечивающим движение.
Недостатком устройства является одно направленность движения и зависимость от катушки кабеля.
Известен также привязной ТПА ГНОМ-ИД, имеющий удаленный доступ через Интернет, снабженный четырьмя двигателями (Елкин А.В., Комаров B.C., Розман Б.Я. История развития телеуправляемого микроробота ГНОМ. ИОРАН им. П.П. Ширшова Нахимовский пр-кт, д. 36. Москва, РФ [11]), телекамерой и блоком плавучести, рабочая глубина до 120 м, маршевая скорость до 3 узлов. Совокупная мощность потребления 150 Вт. вес аппарата 3 кг. Недостатком данного ТПА является наличие 4-х реверсивных двигателей, которые увеличивают массу и потребляемую мощность, что уменьшает автономность аппарата, а также увеличивает сопротивление воды движению аппарата. Для движения в вертикальной плоскости используются два других реверсивных двигателя. В совокупности энергопотребления двигателями аппарата возрастает, что ограничивает автономность.
Технический результат также известного изобретения (патент RU 2751727С1, 16.07.20211 [12]), заключается в том. чтобы, не увеличивая энергопотребление, увеличить маневренность, а так же уменьшить вес. Для чего используют только два реверсивных двигателя а не четыре. При этом каждый двигатель установлен на своей оси, перпендикулярно главной продольной строительной оси.
Известен также телеуправляемый необитаемый подводный аппарат «Марлин-350» (www.tetis-pro.ru [13]), содержащий горизонтальные и вертикальные движители, блок плавучести, видеокамеру и осветители. Подводный аппарат соединен с судном-носителем кабелем, по которому передаются команды управления, информация с датчиков, видеосигнал. Данный ТНПА позволяет обнаруживать подводные объекты и передавать видеоизображения. К недостаткам указанного выше подводного аппарата следует отнести то, что он не обеспечивает автоматический обход препятствий. Аналогичные недостатки имеют и также известные ТНПА (патенты RU №130292 U1, 20.07.2013 [14], RU №2438914 С1. 10.01.2012 [15]. RU №173254 U1, 18.08.2017 [16], RU №169166 U1, 07.03.2017 [17], RU №2672505 C1, 15.11.2018 [18]).
Для расширения возможностей телеуправляемого подводного аппарата при обнаружении подводных объектов с возможностью их автоматического обнаружения и обхода препятствий предложен подводный аппарат, содержащий блок электроники, размещенный в прочном, герметичном корпусе, четыре вертикальных движителя и четыре горизонтальных движителя с векторной схемой расположения для повышения управляемости ТНПА в автоматическом режиме, закрепленных на открытой полипропиленовой раме, блок плавучести, видеокамеру и осветители для мониторинга окружающего пространства, устройство наклона камеры, измерители глубины и курса, пульт управления для подачи управляющих сигналов в надводный блок управления, отправляющий команды по кабель - связке в подводный аппарат, добавлено устройство автоматического обнаружения и обхода препятствий (патент RU №205208U1, 02.07.2021 [19]). Устройство способно обнаруживать препятствия на показаниях альтиметра, гидролокатора кругового обзора и эхолота. Гидролокатор кругового обзора дает акустическую картину в секторе 360°. Данные, полученные от гидролокатора, используются для планирования траектории в модуле расчета оптимального пути обхода препятствия. Низкая частота обновления информации с гидролокатора вносит ограничения на скорость автоматического движения ТНПА. Данные с впередсмотрящего эхолота дополняют акустическую информацию, полученную от гидролокатора, увеличивая максимальную скорость автоматического движения ТНПА. Данные эхолота и альтиметра используются в режимах движения с поддержанием заданного отстояния от поверхности дна. Гидролокатор, эхолот и альтиметр используют интерфейс связи RS485. Информация с этих устройств мультиплексируется и передается по отдельной витой паре кабель-связки ТНПА на береговую станцию. Далее интерпретированные данные передаются в блок электроники подводного аппарата для выдачи команд на движители. Подтверждение сближения осуществляется передним сонаром и сенсором отстояния от дна.
В модуле расчета оптимального пути обхода препятствий в качестве переменных используются точки на радиусе сканирующего сонара при обнаружении препятствия. На основе функции оценки определяется наиболее оптимальная точка направления движения. С помощью нечеткого логического управления производится расчет угла поворота ТНПА для обхода препятствия. Наряду с достоинством данного ТНПА он имеет и существенный недостаток, заключающийся в отсутствие возможности сбора подводных образцов.
Задачей, решаемой также известным изобретением, является расширение функциональных возможностей МТПА за счет конструкторских решений, обеспечивающих ему дополнительные технологические возможности при проведении подводно-технических работ, а именно эффективный сбор подводных образцов и подъем их на поверхность, без ухудшения при этом остойчивости и маневренных качеств МТПА (патент RU №2387570С1, 27.04.2010 [20]).
При этом поставленная задача достигается тем, что в малогабаритном телеуправляемом подводном аппарате [20], содержащем раму модульной конструкции, движители горизонтального и вертикального хода, прочные герметичные контейнеры для размещения электронной части подводного аппарата, светильники, обзорную и стационарную видеокамеры, датчики глубины и температуры, компенсаторы давления, блок плавучести, установленный в верхней части подводного аппарата, манипуляционный модуль, включающий снабженный охватом манипулятор и герметичный привод, причем манипулятор установлен на выходном валу этого привода, надводный модуль управления, включающий пульт управления, источник электропитания, блок отображения видеоинформации, и кабель связи, соединяющий подводный аппарат с надводным модулем, на другом конце выходного вала привода манипулятора дополнительно установлена видеокамера так. что ее ось визирования постоянно направлена в центр схвата манипулятора, подводный аппарат снабжен съемным перфорированным контейнером для сбора образцов, установленным в верхней части подводного аппарата соосно с его вертикальной осью, а обзорная видеокамера установлена посредством кронштейна над блоком плавучести в диаметральной плоскости подводного аппарата в его кормовой части.
В известном малогабаритном телеуправляемом подводном аппарате [20] рама модульной конструкции выполнена герметичной из полипропиленовых труб, съемный перфорированный контейнер для сбора образцов выполнен в виде перевернутого усеченного конуса, кабель связи закреплен на раме в кормовой части подводного аппарата в его диаметральной плоскости в точке ее пересечения с плоскостью расположения горизонтальной группы движителей.
Поставленная задача решается также тем. что размещение перфорированного контейнера для сбора образцов внутри рамы соосно с вертикальной осью подводного аппарата позволяет сохранить его остойчивость и маневренность при выполнении таких специфических подводно-технических работ, как сбор подводных образцов в контейнер и их транспортировка в контейнере на поверхность. Манипуляционный модуль и съемный перфорированный контейнер для сбора образцов конструктивно установлены в подводном аппарате таким образом, что манипулятору достаточно одной вращательной степени свободы для сбора образцов и помещения их в перфорированный контейнер.
Установка дополнительной обзорной видеокамеры на другом конце выходного вала привода манипулятора и размещение обзорной видеокамеры посредством кронштейна над блоком плавучести обеспечивает широкий диапазон угла обзора и позволяет оператору эффективно работать с манипулятором.
Обзорная видеокамера, установленная сверху над блоком плавучести подводного аппарата, позволяет оператору контролировать операцию по сбору образцов в контейнер или выполнять надводный обзор (при нахождении МТПА на поверхности воды), а дополни тельная обзорная видеокамера манипулятора позволяет контролировать работу охвата манипулятора в процессе сбора образцов, так как она расположена в непосредственной близости от схвата и ее ось визирования постоянно направлена в центр схвата.
Широкоугольная высокочувствительная стационарная видеокамера обеспечивает необходимые дальность и угол обзора в условиях слабой освещенности при поиске донных объектов и выполнении подводно-технических работ. Такая компоновка видеосистемы обеспечивает многофункциональную работу подводного аппарата. Данный аналог выбран в качестве прототипа.
Приведенная совокупность как известных, так и отличительных существенных признаков прототипа [20] обеспечивает достижение технического результата - расширение функциональных возможностей МТПА без ухудшения его остойчивости и маневренных качеств, т.е. обеспечиваются эффективная работа манипулятором по сбору подводных образцов и транспортировка образцов к судну - носителю, с сохранением остойчивости и маневренности подводного аппарата и детальный обзор подводного пространства в широком диапазоне угла зрения с одновременным обзором образцов, расположенных на дне. Однако, известные конструктивные особенности прототипа и состав основных и вспомогательных технических средств не позволяет в полной мере обеспечить надежность и безопасность эксплуатации подводного аппарата.
Задачей предлагаемого технического решения является повышение безопасности и надежности эксплуатации подводного аппарата и оперативности при выполнении обширного спектра подводных работ.
Поставленная задача решается за счет того, что в комплексе для осуществления подводных работ, включающий носитель телеуправляемого необитаемого подводного аппарата (ТНПА), на котором размещены ТНПА. пульт управления ТИПА посредством оператора, при этом ТНПА содержит раму модульной конструкции, движители горизонтального и вертикального хода, герметичные контейнеры для размещения электронной части ТНПА. систему освещения, включающую светильники, обзорную и стационарную видеокамеры, комплект измерительных датчиков таких, как: датчики глубины и температуры, компенсаторы давления, блок изменения плавучести, установленный в верхней части ТНГ1А. манипуляционный модуль, включающий снабженный охватом манипулятор и герметичный привод, причем манипулятор установлен на выходном валу этого привода, модуль управления подводного аппарата, включающий пульт управления, источник питания, блок отображения видеоинформации, и кабель - связку, соединяющий ТНПА с носителем ТНПА. на другом конце выходного вала привода манипуля тора дополни тельно установлена видеокамера так. что ее ось визирования постоянно направлена в центр схвата манипулятора, а обзорная видеокамера установлена посредством кронштейна над блоком плавучести в диаметральной плоскости ТИПА в его кормовой части котором в отличие от прототипа [20]. носитель ТНПА выполнен в виде обитаемого подводного аппарата, снабженного гаражом для размещения ТИПА и содержит устройство съема токаи и информации, ТИПА дополнительно снабжен лазерными указателями, гидроакустическим маяком - ответчиком, системой аварийной обстановки с двумя источниками аварийного питания, маяком проблесковым, процессорным модулем, модулем сопряжения, системой энергообеспечения, преобразователем интерфейса и модулем решения задач реального времени, в комплект измерительных датчиков введен гидролокатор, датчики крена и дифферента, обзорная видеокамера выполнена с десяти кратным приближением изображения, светильники выполнены на светодиодах с мощностью светового потока более 2000 люмен с возможностью изменения цветовой температуры и плавной регулировки яркости свечения, манипулятор выполнен в виде одностепенного манипулятора с тросорезом, при этом преобразователь интерфейса и источник питания своими входами соединены с выходами устройства съема тока и информации, размещенного в гараже, через кабель - связку, преобразователь интерфейса, вторым своим входом-выходом соединен с входом- выходом процессорного модуля, который вторым своим входом-выходом соединен с входом-выходом видеосистемы, которая еще одним входом соединена с выходом системы энергообеспечения, который также соединен с еще одним входом процессорного модуля, который еще одним своим выходом соединен с входом модуля решения задач в реальном времени, который вторым входом соединен с еще одним выходом системы энергообеспечения, которая еще одним своим выходом соединена с входом движительного рулевого комплекса, который еще одним своим входом соединен с выходом модуля решения задач в реальном времени, который еще одним выходом соединен с входом комплекта измерительных датчиков, который еще одним входом соединен с еще одним выходом системы энергообеспечения, которая еще одним выходом соединена с входом системы освещения, которая своим входом-выходом соединена с входом-выходом модуля сопряжения, который своими входами соединен с еще одним выходом системы энергообеспечения, а еще одним выходом соединен с модулем решения задач в реальном времени и входами-выходами одностепенного манипулятора, маяка проблескового, гидроакустического маяка - о тветчика, системы аварийной обстановки, соответственно, а одностепенной манипулятор, маяк проблесковый, гидроакустический маяк - ответчик, система аварийной обстановки, соответственно своими входами соединены еще одним выходом системы энергообеспечения, которая еще одним входом соединена с выходом источника питания, а двумя входами-выходами соединена соответственно с входом-выходом двух источников аварийного питания, один из которых своим выходом соединен с еще одним входом маяка проблескового, а второй своим выходом соединен с еще одним входом системы аварийной обстановки.
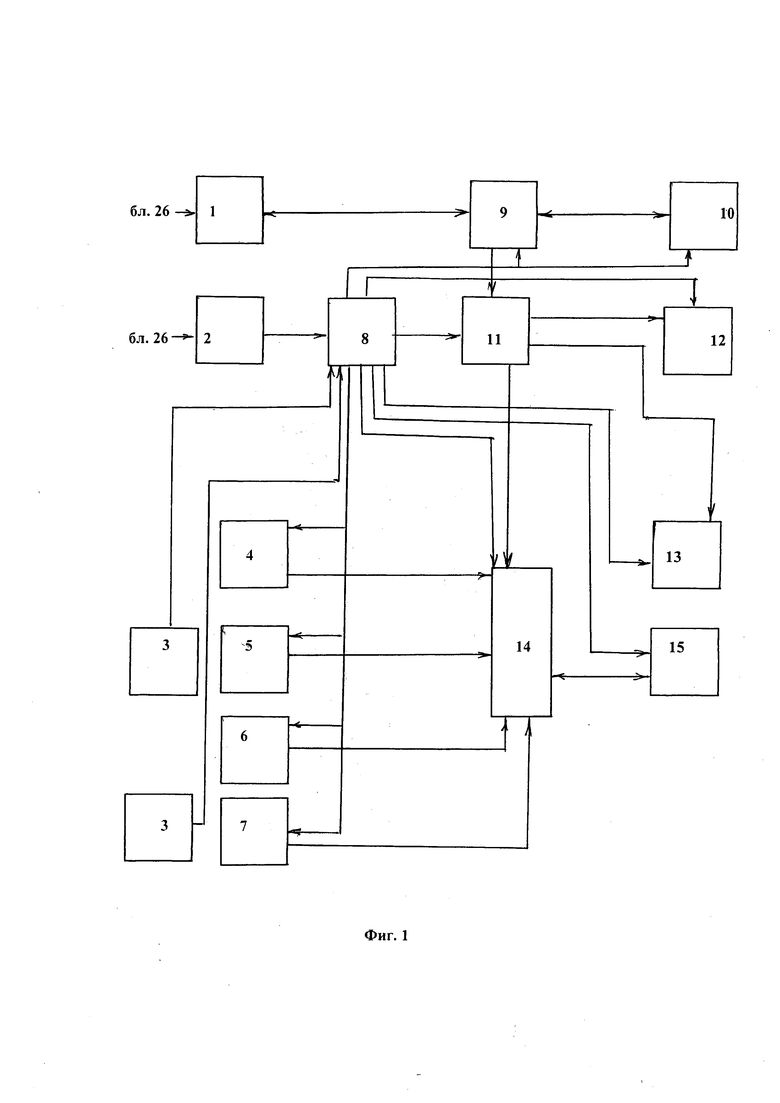
Сущность предлагаемого технического решения поясняется чертежами (фиг.1, фиг.2).
Фиг.1. Блок-схема комплекса бортового телеуправляемого необитаемого подводного аппарата для размещения на обитаемом подводном аппарате. Блок-схема включает преобразователь интерфейса 1. источник питания 2. два источника аварийного питания 3, одностепенный манипулятор 4, маяк проблесковый 5, гидроакустический маяк - ответчик 6. систему аварийной обстановки 7. систему энергообеспечения 8, процессорный модуль 9. видеосистему 10. модуль решения задач в реальном времени 11, движительный рулевой комплекс 12. комплект измерительных датчиков 13. модуль сопряжения 14, систему освещения 15.
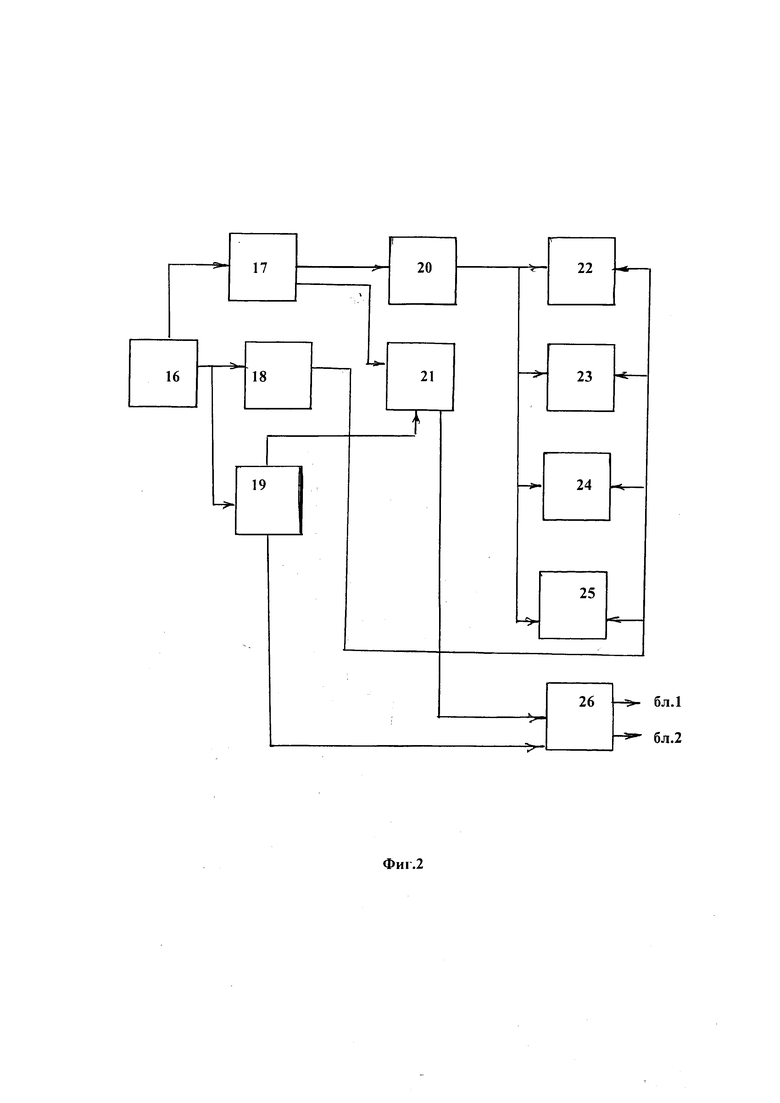
Фиг.2. Блок-схема постановочного оборудования комплекса бортового телеуправляемого необитаемого подводного аппарата для размещения на обитаемом подводном аппарате.
Блок-схема постановочного оборудования включает пульт оператора 16, коммутатор 17, модуль преобразователей 18. преобразователь напряжения 19, преобразователь интерфейса 20. преобразователь интерфейса 21 типа LX200V20, систему отдачи 22 кабеля, укладчик 23 кабеля, систему фиксации 24 кабеля, привод 25, устройство 26 съема тока и информации.
В качестве носителя бортового телеуправляемого необитаемого подводного аппарата используются освоенные промышленностью обитаемые подводные аппараты типа Subcon НРВН4М или Subcon DBH13M. соединенные с бортовым телеуправляемым необитаемым подводным аппаратом (ТНПА) кабель - связкой типа Birns MCBH6F.
При транспортировке ТНПА к месту проведения подводных работ посредством обитаемого подводного аппарата (ОПА) он размещается в гараже.
Гараж (фиг. 2) предназначен для обеспечения работ ОПА с ТНПА, обеспечения размещения и фиксации ТНПА, травления и выборки кабель-связки подключения ТНПА в соответствии с задающим воздействием с пульта управления, автоматической укладки кабель-связки подключения ТНПА на барабан, передачи управляющих сигналов с пульта управления на ТНПА. преобразования напряжения питание ТНПА, защиты ТНПА от внешних воздействий. Гараж состоит из следующих составных частей: рамы, укладчика кабеля в виде барабана, с системой натяжения, фиксации и отдачи кабеля Рама представляет собой пространственную конструкцию из полипропилена, закрепленную на ОПА. посредством кронштейна, и предназначена для защиты элементов комплекса ТНПА и закрепления исполнительных устройств. Барабан предназначен для намотки кабель-связки и приводится в действие электроприводом. Барабан также оснащен системой съема тока и информации, предназначенной для передачи управляющего сигнала и питания с ОПА на ТНПА. Укладчик 23 кабеля представляет собой подвижное устройство, совершающее возвратно-поступательное движение вдоль барабана, в процессе движения равномерно укладывающее на него кабель-связку. Укладчик 23 кабеля оснащен системой натяжения и системой отдачи кабеля. Натяжитель кабеля представляет собой дополнительный привод, обеспечивающий предварительное натяжение кабель-связки при укладке на барабан. Система отдачи 22 кабеля представляет собой электромеханическое режущее устройство, предназначенное для перерезания кабель -связки в месте ее выхода из укладчика кабеля. Система фиксации 24 ТНПА обеспечивает неподвижность ТНПА при движении и маневрировании ОПА при помощи ответных язычков, размещающихся в пазах рамы ТНПА и прижимающих его к нижним перекладинам рамы. ТНПА размещается на нижних перекладинах в передней части гаража таким образом, чтобы подпружиненные язычки системы фиксации 24 ТНПА заходили в ответные углубления рамы ТНПА, предотвращая возможность выхода ТНПА из гаража. Кабель-связка подсоединяется к устройству 26 съема тока и информации, расположенному в барабане, и равномерно укладывается на барабане, после чего проходит между шкивом натяжителя и роликами укладчика 23, а затем через систему отдачи направляется к ТНПА. Натяжение кабель-связки между барабаном и шкивом укладчика 23 осуществляется за счет создания постоянного момента на шкиве приводом натяжителя. Проскальзывание кабель-связки предотвращается ее зажатием между роликом укладчика 23 и боковыми стенками ручья шкива, имеющими рифление. Вращение барабана для стравливания или выборки кабель-связки обеспечивается соответствующим приводом, неподвижно закрепленным относительно силовой рамы гаража. Барабан способен вместить до 30 метров кабеля. Момент, развиваемый на барабане - 11 Н⋅м. Укладчик 23 кабель-связки располагается на двунаправленном винте и связан с ним при помощи язычка. Винт приводится в движение барабаном при помощи передачи вращения через комплект зубчатых колес. В укладчике 23 предусмотрена система роликов, пропускающая через себя кабель-связку ТНПА. Укладка кабель-связки на барабан происходит при движении устройства по бесконечному винту. Освобождение ТНПА из системы фиксации 24 осуществляется приводом, который преодолевает момент пружин и выводит язычки системы фиксации 24 из ответных углублений в раме ТНПА. Барабан для хранения кабеля, закреплен в задней части силовой рамы, а вращение барабана осуществляется с помощью бесколлекторного редуцированного электродвигателя в маслозаполненном компенсированном корпусе. Передача управляющего сигнала и питающего напряжения на ТНПА осуществляется с помощью установленного внутри барабана оптоэлектрического вращающегося коммутационного устройства, Система аварийной отдачи кабель-связки выполнена гильотинного типа. Система захвата и удержания ТНПА представляет собой створку силовой рамы, которая приводится в действие редуцированным сервоприводом. Система автоматической укладки кабель-связки предназначена для предотвращения провиса или обрыва кабель связки.
Коммутатор 17 (фиг. 2) обеспечивает распределение управляющих сигналов и питания с ОПА между ТНПА и узлами гаража. Коммутатор 17 имеет разъемы для подключения ОПА, с которого в комплекс гаража поступает питание и управляющие команды, а также разъемы для подключения ТНПА и внутренних устройств гаража. Коммутатор обеспечивает преобразование напряжения питания: понижение для узлов гаража, повышение - для ТНПА, - а также преобразование интерфейса связи из Ethernet в RS-485. Привод системы отдачи кабеля при получении команды на вращение приводит в движение механизм, надвигающий участок кабель-связки между укладчиком и ТНПА на одно из лезвий, что приводит к перерезанию кабель-связки в этом месте. Управление всеми приводами гаража осуществляется по протоколу ModBusRTU.
Основным функциональным назначением комплекса ТНПА является получение оператором видеоизображения объектов находящихся в толще воды, посредством перемещения ТНПА, оснащенного видеокамерой. ТНПА представляет рамную конструкцию, на которой установлено оборудование ТНПА.
Рама несущая состоит из нескольких элементов, выполненных из высокомолекулярного полиэтилена. Форма рамы обеспечивает рациональное размещение всех элементов и систем ТНПА при его минимальных габаритах, а также возможность установки быстросъемных модулей с дополнительным оборудованием. В верхней части рамы установлен блок плавучести. Использование полиэтилена в качестве материала для изготовления рамы позволяет достичь оптимального соотношения между ее прочностью и массой. Помимо этого, полипропилен обеспечивает ударопрочность конструкции в силу высоких ударопоглощающих свойств.
В предлагаемом устройстве обеспечена возможность установки нулевой плавучести ТНПА (в комплекте с дополнительным оборудованием) как в пресной, так и в морской воде с использованием комплекта балластных грузов, которые размещаются на раме ТНПА.
Перемещение ТНПА в толще воды осуществляется за счет работы ДРК 12, состоящего из шести движителей разгруженного типа на основе бесколлекторных электромоторов фирмы Maxon (Швейцария). Они размещены в круглых алюминиевых корпусах. Четыре маршевых движителя установлены под углом (векторно), Такое расположение обеспечивает регулируемый вектор тяги, что позволяет перемещать ТНПА в любом горизонтальном направлении, а два вертикальных движителя обеспечивают изменение дифферента ТНПА. В качестве движителей использованы винтомоторные агрегаты ХТ-150, которые могут функционировать на рабочей глубине 2 500 м и имеют мощность 200 Вт и представляют собой бесколлекторный электродвигатель, помещенный в компенсированный герметичный корпус вместе с контроллером. Передача вращения с вала двигателя на гребной винт осуществляется с помощью магнитной муфты.
Видеосистема 10 ТНПА состоит из двух цветных видеокамер типа FullHD (1920×1080 пикс.), переднего и заднего вида, помещенных в прочные корпуса, системы управления видеокамерами и хранения фото-видео данных, интегрированной в программное обеспечение пульта управления комплексом или внутренней памяти ТНПА. Привод наклона передней камеры обеспечивает наклон камеры в диапазоне углов ±30°. Видеосистема обеспечивает: переключение видеокамер в черно-белый режим; пяти кратное приближение изображения; видеозахват и сохранение изображения от видеокамер в подсистему хранения фото-видео данных на пульте управления комплексом ОПА или внутреннюю память ТНПА по команде оператора ОПА; автоматический баланс белого. Видеосистема осуществляет запись длительностью не менее 1,5 часа во внутренней памяти ТНПА.
Система освещения 15 ТНПА состоит из шести светильников, четыре из которых установлены на фронтальной стороне рамы, а два на кормовой. Светильник представляет собой прочный корпус, в который установлена светодиодная матрица с платой управления. Общая интенсивность светового потока не менее 2000 люмен. Имеется возможность изменения цветовой температуры и плавной регулировки яркости свечения оператором ТНПА для уменьшения эффекта засветки от взвешенных в воде частиц. Размещение светильников и видеокамер выбраны таким образом, чтобы минимизировать зоны засветки.
Два лазерных указателя входят в состав системы освещения и размещены в прочных корпусах установлены на фронтальной части ТНПА, обеспечивают проведение визуальной оценки оператором ТНПА линейных размеров обследуемых объектов ТНПА осуществляет передачу данных об ориентации в толще воды с комплекта измерительных датчиков 13 (курсоуказатель, датчик глубины, датчики крена и дифферента, гидролокатор) на монитор пульта управления оператора ОПА, в программном обеспечении, которых реализованы алгоритмы удержания ТНПА по глубине и курсу («автоглубина» и «автокурс»).
Для получения данных по курсу, крену и дифференту, а также обеспечения функции «автокурс» использован датчик (инерционное измерительное устройство) с мощным микроконтроллером, имеющим встроенную программу предварительной обработки данных, что позволяет на выходе иметь готовые к использованию результаты без необходимости проведения калмановской фильтрации для всех осей: крен, тангаж и курс (рысканье). Для обеспечения функции «автоглубина» кроме датчика глубины использован дифференциальный датчик давления фирмы Keller.
Одностепенной манипулятор типа «схват» обеспечивает возможность захвата и удержания обнаруженного подводного объекта с целью доставки его к ОПА.
В составе системы энергообеспечения ТНПА предусмотрены два аварийных источника питания, достаточные по емкости для функционирования ТНПА в аварийном режиме не менее 12 ч.
В электронной аппаратуре ТНПА реализован аварийный режим работы. Обеспечена возможность перехода в аварийный режим по командам от модуля решения задач реального времени 11 или пульта управления ОПА.
В электронной аппаратуре ТНПА реализован режим «энергосбережения». Включение режима «энергосбережения» осуществляется по командам, поступающим от пульта управления комплексом или пульта управления ОПА. При включении режима «энергосбережения» электронная аппаратура ТНПА переключается на встроенный аварийный источник питания.
Позиционирование бортового ТНПА относительно ОПА осуществляется с помощью гидроакустической системы ОПА и гидроакустического маяка-ответчика, устанавливаемого на ТНПА.
Электропитание комплекса ТНПА осуществляется от сети постоянного тока напряжением от 190 до 250 В. Потребляемая пиковая мощность комплекса ТНПА не превышает 2.0 кВт. Электропитание ТНПА осуществляется по кабель-связке от системы энергообеспечения ОПА и за счет встроенных в ТНПА химических источников тока -аккумуляторных батарей.
Для расширения круга выполнимых задач и повышения качества и объема работ, проводимых ТНПА. используется одностепенной манипулятор с тросорезом. С помощью подводного одностепенного манипулятора возможно выполнение захвата объектов, расположенных на дне акваторий, и удержании этих объектов с целью доставки их на ОПА или перемещения в воде в заданную точку. В качестве одностепенного манипулятора использован манипулятор типа ХМ-1, конструктивными особенностями которого являются наличие тросореза, компенсированный маслозаполненный корпус, бесколлекторный электродвигатель.
Подводный одностепенной манипулятор представляет собой металлический корпус с подвижным трехпалым захватом. Захват приводится в движение штоком, который через уплотнение устанавливается в корпус манипулятора. Шток в свою очередь связан с электродвигателем через передачу винт-гайка. Особенностью конструкции манипулятора является наличие возможности установки ножа на один из пальцев захвата. Данная особенность позволяет перерезать веревки и неметаллические тросы небольшого диаметра.
В качестве пульта управления комплексом ТНПА использован пульт типа ХНС-2, который позволяет осуществлять управление ТНПА и гаражом. На мониторе выводится изображение с видеокамер, установленных на ТНПА, а также данные с измерительных датчиков ТНПА.
Состав пульта управления комплексом ОПА включает джойстики, регуляторы камеры и света, группу кнопочных переключателей, аварийный выключатель, сенсорный дисплей. Два трехстепенных джойстика позволяют управлять горизонтальным и вертикальным движением аппарата, а также осуществлять сжатие и разжатие одностепенного манипулятора. Регулятор управления угла наклона камеры позволяет осуществлять управление положением камеры. Регулятор интенсивности светильников позволяет осуществлять управление интенсивностью светильников ТНПА и осуществлять их полное отключение. Пять кнопочных переключателей позволяют осуществлять открытие и закрытие гаража, ручное управление механизмами гаража и включение/выключение лазерных указателей. Аварийный выключатель предназначен для включения аварийного режима. Сенсорный дисплей диагональю 10,1'' предназначен для вывода данных с датчиков ТНПА и управления дополнительными функциями ТНПА. Программное обеспечение пульта управления обеспечивает режим сохранения данных от видеосистемы ТНПА с указанием в кадре аннотации - текста служебной информации. В электронной аппаратуре ТНПА реализован аварийный режим работы. Функциями аварийного режима ТНПА являются: перевод электросистемы ТНПА на аварийный источник питания; сброс аварийного балласта; отдача ТНПА от кабель-связки; включение проблескового маяка при всплытии ТНПА на поверхность моря; перевод гидроакустического маяка-ответчика в режим «пингера» (периодического излучения гидроакустических сигналов). Время функционирования ТНПА в аварийном режиме не менее 24 часов. Включение режима «энергосбережения» осуществляется по командам, поступающим от пульта управления комплексом при потере связи с ОПА, при этом электронная аппаратура переключается на встроенный аварийный источник питания ТНПА.
Модуль решения задач реального времени 11 включает блоки анализа регистрируемой информации и выполнен в виде регистратора, работающего в режиме непрерывной регистрации параметров окружающей обстановки и динамических характеристик ТНПА с выдачей сообщения на управляющий компьютер о превышении заданного порога или в заранее заданные промежутки времени ("по календарю") с записью результатов на "твердотельную" память объемом до 32 гигабайт и выполнен с возможностью управляется через встроенный интерфейс "Ethernet 10/100". В модуле решения задач реального времени 11 также выполняется расчет оптимального обхода препятствий, путем расчета безопасного угла поворота ТНПА для обхода препятствий, представляющих потенциальную опасность для ТНПА и выявленных посредством видеосистемы 10, лазерных указателей и гидролокатора, с учетом реальных скоростных и динамических характеристик ТНПА на данный момент времени, посредством инерционного измерительного устройства.
Комплектацию ТНПА можно изменять, дополнительно устанавливая различную аппаратуру в зависимости от решаемых задач.
Посредством лазерных указателей, установленных в носовой кормовой частях корпуса ТНПА определяются линейные размеры обнаруженных объектов. Посредством системы изменения плавучести осуществляется обзор подводных объектов с нескольких горизонтах по глуби. Посредством маяка-ответчика осуществляется позиционирование ТНПА. Посредством гидролокатора, выполненного в виде мини гидролокатором кругового обзора осуществляется обзор окружающей подводной обстановки, обнаружение и классификация обнаруженных подводных объектов. Инерционное измерительное устройство выполняет функции определения скоростных и динамических параметров ТНПА.
Выполнение несущей рамы с блоками плавучести обеспечивает изменение горизонта плавучести МТПА. Блоки плавучести выполнены из композита на основе полых стеклянных микросфер (синтактика).
Для обнаружения препятствий может быть использованы показания гидролокатора кругового обзора и лазерных указателей.
Повышение эффективности эксплуатации ТНПА обеспечивается за счет компактности конструкции ТНПА и оборудования, а также за счет автоматизации процесса развертывания ТНПА при выпуске и приеме ТНПА, а также в процессе его эксплуатации в робототехническом режиме при решении поставленных задач в период морских исследований, что позволит значительно сократить персонал обслуживающий ТНПА и снизить вероятность несанкционированного обрыва ТНПА при неблагоприятных обстоятельствах.
Источники информации.
1. Последние разработки японских фирм в области судостроения и создания аппаратуры для подводных работ и исследований. Технический бюллетень, Токио, Торгпредство СССР, 1988 г.
2. ТНПА «Обзор-600» (www.tetis-pro.ru).
3. Осмотровый телеуправляемый необитаемый подводный аппарат «Калан-500», (www.bnti.ru).
4. Миниатюрный телеуправляемый подводный аппарат (ТПА) «SeaBotix», (www.seabotix.ru).
5. Малогабаритный телеуправляемый подводный аппарат фирмы Seaeye «ФАЛКОН» (www.seaeye.com, www.tnpa.ru/falkon.htm).
6. Заявка US №2007283871 А1, 13.12.2007.
7. Патент US№4721055 А, 26.01.1988.
8. Заявка KR №20030088796 А, 20.11.2003.
9. Патент RU №2104210 С1, 10.02.1998.
10. Патент RU №2127207.
11. Елкин А.В., Комаров B.C., Розман Б.Я. История развития телеуправляемого микроробота ГНОМ. ИОРАН им. П.П. Ширшова. Нахимовский пр-кт, д. 36. Москва, РФ.
12. Патент RU 2751727С1, 16.07.20211.
13. Телеуправляемый необитаемый подводный аппарат «Марлин-350» (www.tetis-pro.ru.)
14. Патент RU №130292 U1, 20.07.2013.
15. Патент RU №2438914 С1, 10.01.2012.
16. Патент RU №173254 U1. 18.08.2017.
17. Патент RU №169166 U1, 07.03.2017.
18. Патент RU №2672505 С1. 15.11.2018.
19. Патент RU №205208 U1. 02.07.2021.
20. Патент RU №2387570 С1. 27.04.2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях | 2019 |
|
RU2715158C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| ТЕЛЕУПРАВЛЯЕМЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2024 |
|
RU2829517C1 |
| Арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2023 |
|
RU2836682C2 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
Изобретение представляет собой комплекс для осуществления подводных работ и может быть использовано для проведения подводных осмотровых и обследовательских работ в прибрежных морских и внутренних водах с наличием препятствий в виде подводных объектов на пути. Носитель ТНПА выполнен в виде обитаемого подводного аппарата, снабженного гаражом для размещения ТНПА, который дополнительно снабжен лазерными указателями, гидроакустическим маяком - ответчиком, системой аварийной обстановки, двумя источниками аварийного питания, маяком проблесковым, процессорным модулем, модулем сопряжения, системой энергообеспечения, преобразователем интерфейса, устройством съема тока информации и модулем решения задач реального времени, в комплект измерительных датчиков введен гидролокатор, датчики крена и дифферента, обзорная видеокамера выполнена с десяти кратным приближением изображения, светильники выполнены на светодиодах с мощностью светового потока более 2000 люмен с возможностью изменения цветовой температуры и плавной регулировки яркости свечения для уменьшения эффекта засветки от взвешенных в воде частиц, манипулятор выполнен в виде одностепенного манипулятора с тросорезом. Повышается надежность и безопасность эксплуатации ТНПА. 2 ил.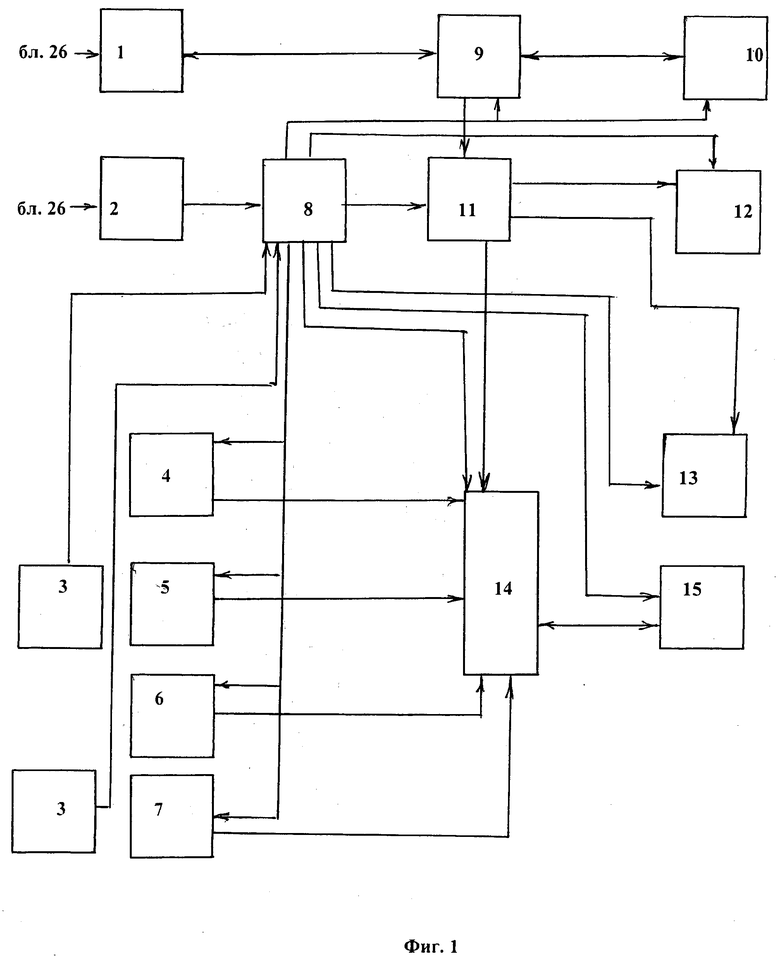
Комплекс для осуществления подводных работ, включающий носитель телеуправляемого необитаемого подводного аппарата (ТНПА), на котором размещены ТНПА, пульт управления ТНПА посредством оператора, при этом ТНПА содержит раму модульной конструкции, движители горизонтального и вертикального хода, герметичные контейнеры для размещения электронной части ТНПА, систему освещения, включающую светильники, обзорную и стационарную видеокамеры, комплект измерительных датчиков, таких как датчики глубины и температуры, компенсаторы давления, блок изменения плавучести, установленный в верхней части ТИПА, манипуляционный модуль, включающий снабженный охватом манипулятор и герметичный привод, причем манипулятор установлен на выходном валу этого привода, модуль управления подводного аппарата, включающий пульт управления, источник питания, блок отображения видеоинформации, и кабель - связку, соединяющий ТНПА с носителем ТНПА, на другом конце выходного вала привода манипулятора дополнительно установлена видеокамера так, что ее ось визирования постоянно направлена в центр схвата манипулятора, а обзорная видеокамера установлена посредством кронштейна над блоком плавучести в диаметральной плоскости ТНПА в его кормовой части, отличающийся тем, что носитель ТНПА выполнен в виде обитаемого подводного аппарата, снабженного гаражом для размещения ТНПА, и содержит устройство съема тока и информации, ТНПА дополнительно снабжен лазерными указателями, гидроакустическим маяком-ответчиком, системой аварийной обстановки с двумя источниками аварийного питания, маяком проблесковым, процессорным модулем, модулем сопряжения, системой энергообеспечения, преобразователем интерфейса и модулем решения задач реального времени, в комплект измерительных датчиков введен гидролокатор, датчики крена и дифферента, обзорная видеокамера выполнена с десяти кратным приближением изображения, светильники выполнены на светодиодах с мощностью светового потока более 2000 люмен с возможностью изменения цветовой температуры и плавной регулировки яркости свечения, манипулятор выполнен в виде одностепенного манипулятора с тросорезом, при этом преобразователь интерфейса и источник питания своими входами соединены с выходами устройства съема тока и информации, размещенного в гараже, через кабель-связку, преобразователь интерфейса, вторым своим входом-выходом соединен с входом-выходом процессорного модуля, который вторым своим входом-выходом соединен с входом-выходом видеосистемы, которая еще одним входом соединена с выходом системы энергообеспечения, который также соединен с еще одним входом процессорного модуля, который еще одним своим выходом соединен с входом модуля решения задач в реальном времени, который вторым входом соединен с еще одним выходом системы энергообеспечения, которая еще одним своим выходом соединена с входом движительного рулевого комплекса, который еще одним своим входом соединен с выходом модуля решения задач в реальном времени, который еще одним выходом соединен с входом комплекта измерительных датчиков, который еще одним входом соединен с еще одним выходом системы энергообеспечения, которая еще одним выходом соединена с входом системы освещения, которая своим входом-выходом соединена с входом-выходом модуля сопряжения, который своими входами соединен с еще одним выходом системы энергообеспечения, а еще одним выходом соединен с модулем решения задач в реальном времени и входами-выходами одностепенного манипулятора, маяка проблескового, гидроакустического маяка-ответчика, системы аварийной обстановки, соответственно, а одностепенной манипулятор, маяк проблесковый, гидроакустический маяк-ответчик, система аварийной обстановки, соответственно, своими входами соединены еще с одним выходом системы энергообеспечения, которая еще одним входом соединена с выходом источника питания, а двумя входами-выходами соединена соответственно с входом-выходом двух источников аварийного питания, один из которых своим выходом соединен с еще одним входом маяка проблескового, а второй своим выходом соединен с еще одним входом системы аварийной обстановки.
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПОЛИИМЙДНОГО ВОЛОКНА | 0 |
|
SU205208A1 |
| CN 112208736 А, 12.01.2021 | |||
| WO 2017085735 А1, 26.05.2017 | |||
| CN 107839859 А, 27.03.2018.. | |||

