Изобретение относится к подводному судостроению, а именно к малогабаритным телеуправляемым подводным аппаратам. (МТПА), в частности к управляемым по кабелю связи самоходным МТПА, предназначенным преимущественно для осмотра подводных объектов и сбора подводных образцов.
Известен телеуправляемый необитаемый подводный аппарат (ТНПА) «Dolphin-3К», разработанный в Японии центром JAMSTEC, с глубиной погружения 3300 м («Последние разработки японских фирм в области судостроения и создания аппаратуры для подводных работ и исследований, Технический бюллетень, Токио, Торгпредство СССР, 1988 г.). ТНПА имеет рамную конструкцию, в носовой части размещены стереотелекамеры со светильниками, курсовой гидролокатор, два манипулятора снабженные захватами, причем манипуляторы имеют пять и семь степеней свободы соответственно, навесной контейнер для сбора образцов, установленный в носовой части подводного аппарата, и блок плавучести. Управление и передача информации осуществляются по кабель-тросу длиной 5000 м с волоконно-оптической линией связи. Электрогидравлическая движительная система включает шесть движителей, обеспечивая маршевую, вертикальную и лаговую скорости. Подводный аппарат связан по кабель-тросу с пультом управления, который соединен с цветным монитором.
Подводный аппарат предназначен для работы на больших глубинах. С его помощью можно доставлять на дно или поднимать грузы массой до 200 кг. Используется преимущественно для изучения минеральных ресурсов океана, в том числе кобальтовых образований и гидротермальных отложений. Данный подводный аппарат технически сложно и экономически нецелесообразно применять на малых глубинах.
Известен ТНПА «Обзор-600» (www.tetis-pro.ru), содержащий раму, движители, гидролокатор кругового обзора, видеокамеры и манипулятор «схват». ТНПА соединен с судном-носителем кабелем, по которому передаются команды управления, информация от датчиков и видеосигнал. Данный ТНПА позволяет обнаружить подводные объекты, передать видеоизображения и выполнить подводно-технические работы в объеме возможностей манипулятора «схват». Подводный аппарат работает на небольших глубинах до 600 метров.
К недостаткам указанного выше ТНПА следует отнести то, что он имеет ограниченные возможности при выполнении подводно-технических работ по сбору подводных образцов и их подъему на поверхность. Манипулятор подводного аппарата может взять только один образец и может поднять его на судно-носитель только при подъеме самого ТНПА, т.к. в его конструкции отсутствует контейнер для сбора образцов. Оператору вновь опустить подводный аппарат в ту же точку за следующим образцом очень сложно.
Известен осмотровый телеуправляемый необитаемый подводный аппарат «Калан-500», (www.bnti.ru), содержащий корпус, движители, гидролокатор секторного обзора, светильники, видеокамеры и малогабаритный манипулятор. ТНПА соединен с судном-носителем кабелем, по которому передаются команды управления, информация от датчиков и видеосигнал. Данный ТНПА позволяет проводить осмотровые и инспекционные работы на подводных объектах, передавать видеоизображения и осуществлять подъем объектов вместе с подъемом на поверхность самого аппарата. Подводный аппарат работает на глубинах до 500 метров.
Известен миниатюрный телеуправляемый подводный аппарат (ТПА) «SeaBotix», (www.seabotix.ru), содержащий корпус из высокопрочного пластика, четыре движителя, гидроакустическую аппаратуру, светильник, видеокамеры и манипулятор. ТПА соединен с судном-носителем кабелем, по которому передаются команды управления, информация от датчиков и видеосигнал. Данный ТПА позволяет проводить поиск подводных объектов и выполнение осмотровых и обследовательских работ под водой в прибрежных морских или внутренних водах, передавать видеоизображения и осуществлять подъем одного предмета одновременно с подъемом самого подводного аппарата. Подводный аппарат работает на небольших глубинах до 300 метров.
Известные подводные аппараты «Калан-500» и «SeaBotix» имеют тот же недостаток, что и известный «Обзор-600», а именно ограниченные технологические возможности при выполнении подводно-технических работ по сбору подводных образцов и их подъему на поверхность, т.к. в конструкциях этих известных подводных аппаратов нет контейнеров для сбора образцов и отсутствует поворот манипулятора в вертикальной плоскости.
Известен также малогабаритный телеуправляемый подводный аппарат фирмы Seaeye «ФАЛКОН» (www.seaeye.com, www.tnpa.ru/falkon.htm). Подводный аппарат содержит раму модульной конструкции, выполненную из полипропилена, движители горизонтального и вертикального хода. Электронные компоненты подводного аппарата размещены в прочных герметичных контейнерах. Кроме того, «ФАЛКОН» содержит светильники, обзорную и стационарную черно-белую видеокамеры, датчики глубины и температуры, компенсаторы давления, блок плавучести, установленный в верхней части подводного аппарата, манипуляционный модуль, включающий снабженный схватом манипулятор и герметичный привод. Манипулятор установлен на выходном валу привода. Подводный аппарат снабжен надводным модулем управления, который состоит из пульта управления, источника электропитания, блока отображения видеоинформации. Подводный аппарат соединен с надводным модулем посредством кабель-троса (кабель связи).
Однако выполнение одной из функциональных задач данным подводным аппаратом затруднено, а именно проведение подводно-технических работ по сбору подводных образцов и подъему их на поверхность. Отсутствие в нем контейнера для сбора образцов не позволяет выполнять многократный сбор подводных образцов без подъема подводного аппарата на поверхность. Кроме того, отсутствие видеокамеры у манипулятора и недостаточный угол обзора обзорной видеокамеры не позволяют производить детальный обзор подводного пространства в широком диапазоне угла зрения с одновременным обзором процесса сбора образцов, находящихся на дне.
Задачей, решаемой настоящим изобретением, является расширение функциональных возможностей МТПА за счет конструкторских решений, обеспечивающих ему дополнительные технологические возможности при проведении подводно-технических работ, а именно эффективный сбор подводных образцов и подъем их на поверхность, без ухудшения при этом остойчивости и маневренных качеств МТПА.
Поставленная задача достигается тем, что в малогабаритном телеуправляемом подводном аппарате, содержащем раму модульной конструкции, движители горизонтального и вертикального хода, прочные герметичные контейнеры для размещения электронной части подводного аппарата, светильники, обзорную и стационарную видеокамеры, датчики глубины и температуры, компенсаторы давления, блок плавучести, установленный в верхней части подводного аппарата, манипуляционный модуль, включающий снабженный охватом манипулятор и герметичный привод, причем манипулятор установлен на выходном валу этого привода, надводный модуль управления, включающий пульт управления, источник электропитания, блок отображения видеоинформации, и кабель связи, соединяющий подводный аппарат с надводным модулем, на другом конце выходного вала привода манипулятора дополнительно установлена видеокамера так, что ее ось визирования постоянно направлена в центр схвата манипулятора, подводный аппарат снабжен съемным перфорированным контейнером для сбора образцов, установленным в верхней части подводного аппарата соосно с его вертикальной осью, а обзорная видеокамера установлена посредством кронштейна над блоком плавучести в диаметральной плоскости подводного аппарата в его кормовой части.
В малогабаритном телеуправляемом подводном аппарате рама модульной конструкции выполнена герметичной из полипропиленовых труб.
В малогабаритном телеуправляемом подводном аппарате съемный перфорированный контейнер для сбора образцов выполнен в виде перевернутого усеченного конуса.
В малогабаритном телеуправляемом подводном аппарате кабель связи закреплен на раме в кормовой части подводного аппарата в его диаметральной плоскости в точке ее пересечения с плоскостью расположения горизонтальной группы движителей.
Поставленная задача решается тем, что размещение перфорированного контейнера для сбора образцов внутри рамы соосно с вертикальной осью подводного аппарата позволяет сохранить его остойчивость и маневренность при выполнении таких специфических подводно-технических работ, как сбор подводных образцов в контейнер и их транспортировка в контейнере на поверхность.
Манипуляционный модуль и съемный перфорированный контейнер для сбора образцов конструктивно установлены в подводном аппарате таким образом, что манипулятору достаточно одной вращательной степени свободы для сбора образцов и помещения их в перфорированный контейнер.
Установка дополнительной обзорной видеокамеры на другом конце выходного вала привода манипулятора и размещение обзорной видеокамеры посредством кронштейна над блоком плавучести обеспечивает широкий диапазон угла обзора и позволяет оператору эффективно работать с манипулятором. Обзорная видеокамера, установленная сверху над блоком плавучести подводного аппарата, позволяет оператору контролировать операцию по сбору образцов в контейнер или выполнять надводный обзор (при нахождении МТПА на поверхности воды), а дополнительная обзорная видеокамера манипулятора позволяет контролировать работу охвата манипулятора в процессе сбора образцов, так как она расположена в непосредственной близости от схвата и ее ось визирования постоянно направлена в центр схвата. Широкоугольная высокочувствительная стационарная видеокамера обеспечивает необходимые дальность и угол обзора в условиях слабой освещенности при поиске донных объектов и выполнении подводно-технических работ. Такая компоновка видеосистемы обеспечивает многофункциональную работу подводного аппарата.
Приведенная совокупность как известных, так и отличительных существенных признаков обеспечивает достижение технического результата - расширение функциональных возможностей МТПА без ухудшения его остойчивости и маневренных качеств, т.е. обеспечиваются эффективная работа манипулятором по сбору подводных образцов и транспортировка образцов к судну - носителю, с сохранением остойчивости и маневренности подводного аппарата и детальный обзор подводного пространства в широком диапазоне угла зрения с одновременным обзором образцов, расположенных на дне.
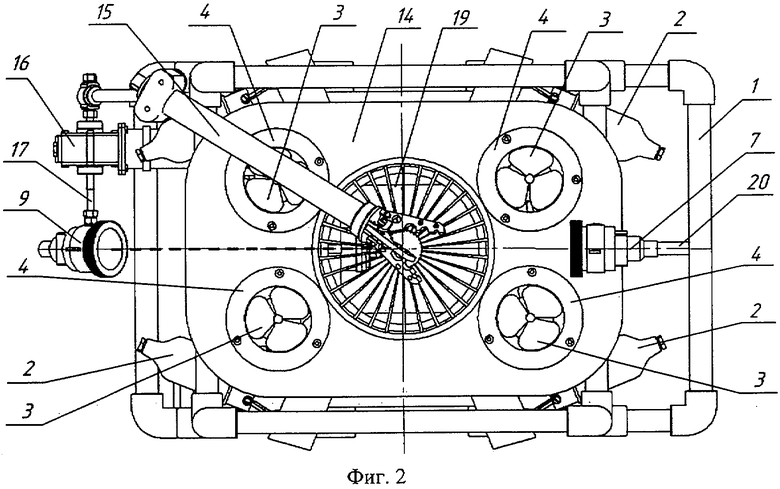
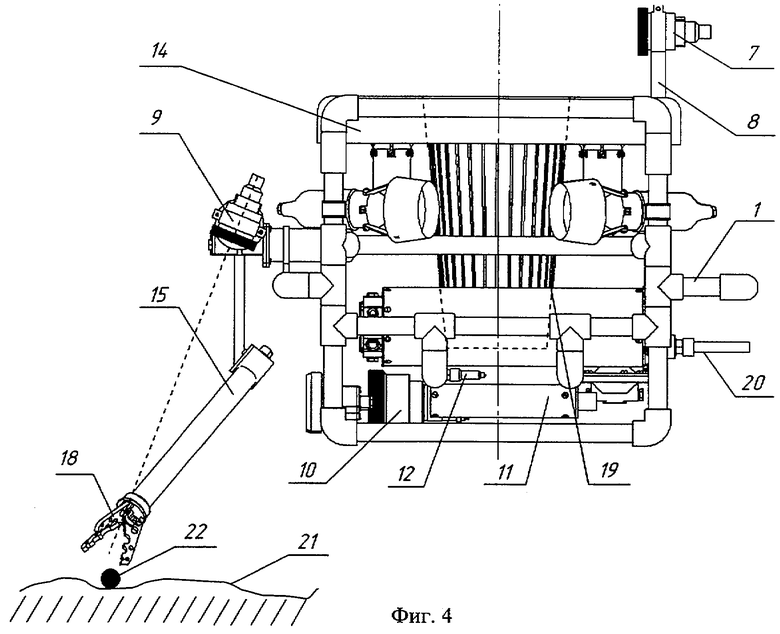
Изобретение поясняется чертежами, где на фиг.1 изображен вид подводного аппарата спереди; на фиг.2 - вид подводного аппарата сверху; на фиг.3 - вид подводного аппарата сбоку (в транспортном состоянии); на фиг.4 - вид подводного аппарата сбоку (в процессе сбора образцов).
Малогабаритный телеуправляемый подводный аппарат, выполненный согласно изобретению, содержит раму 1 модульной конструкции, движители 2 горизонтального хода и движители 3 вертикального хода с установочными фланцами 4, прочные герметичные контейнеры 5 для размещения электронной части подводного аппарата, светильники 6, обзорную видеокамеру 7, установленную на кронштейне 8, видеокамеру 9 манипулятора, стационарную видеокамеру 10, датчики глубины 11 и температуры 12, компенсаторы 13 давления, блок плавучести 14, установленный в верхней части подводного аппарата, манипулятор 15 и герметичный привод 16 манипулятора с выходным валом 17, схват 18 манипулятора, перфорированный контейнер 19 для сбора образцов, надводный модуль управления (на чертежах не показан) и кабель связи 20, соединяющий подводный аппарат с надводным модулем.
Дополнительно на чертеже показаны: 21 - дно моря; 22 - подводные образцы.
На раме 1 модульной конструкции установлен привод 16 манипулятора. На выходном валу 17 привода 16 установлены видеокамера 9 и манипулятор 15. Ось визирования видеокамеры 9 манипулятора 15 постоянно направлена в центр схвата 18. Благодаря расположению видеокамеры 9 и манипулятора 15 на общем выходном валу 17 привода 16, взаимное положение видеокамеры 9 манипулятора 15 и схвата 18 остается неизменным при вращении выходного вала 17 приводом 16. Съемный перфорированный контейнер 19 установлен в верхней части подводного аппарата соосно с его вертикальной осью и закреплен в блоке плавучести 14. При таком конструктивном решении вектор силы тяжести Gp помещаемых в перфорированный контейнер 19 образцов 22 всегда будет расположен вдоль линии действия вектора силы тяжести Р подводного аппарата, что исключает возникновение дополнительных возмущающих моментов, действующих на аппарат по крену и/или дифференту. Съемный перфорированный контейнер 19 размещен в подводном аппарате таким образом, что остойчивость подводного аппарата при сборе образцов и опускании их в контейнер только увеличивается за счет того, что точка приложения вектора сил тяжести собранных образцов Gp всегда расположена ниже центра объема V подводного аппарата. Обзорная видеокамера 7 установлена на кронштейне 8 таким образом, что она позволяет оператору видеть схват 18 в верхнем (транспортном) положении и управлять сбросом образцов в контейнер, обозревать надводное пространство в случае расположения подводного аппарата в незаглубленном положении, а также обозревать предметы, расположенные выше и впереди рамы 1, в том случае, когда подводный аппарат находится под водой. Путем регулирования положения обзорной видеокамеры 7 на кронштейне 8 можно варьировать дальность верхнего обзора. Расположение схвата 18 в конечном положении (фиг.3) ориентировано таким образом, что сбрасываемые в перфорированный контейнер 19 образцы 22 падают в центр его дна. Конструктивное решение подводного аппарата позволяет совершать сбор и складывание подводных образцов 22 в перфорированный контейнер 19, используя одностепенной привод 16 поворота манипулятора 15.
Два светодиодных светильника 6 закреплены в передней части рамы 1 и обеспечивают качественную работу видеокамеры 9 манипулятора 15 и стационарной видеокамеры 10.
Видеосистема подводного аппарата состоит из видеокамеры 9 манипулятора 15, обзорной видеокамеры 7 и стационарной широкоугольной черно-белой видеокамеры 10. В процессе работы подводного аппарата видеокамеры работают, как правило, в следующих сочетаниях. Стационарная черно-белая видеокамера 10 является основной при поиске цели и движении под водой. При работе схвата 18 с образцом основной рабочей видеокамерой является видеокамера 9 манипулятора 15, так как позволяет всегда отслеживать в поле своего зрения положение схвата 18 и управлять им. При опускании подводных образцов с помощью манипулятора 15 в перфорированный контейнер 19 основной рабочей видеокамерой становится обзорная видеокамера 7, установленная на кронштейне 8, так как остальные видеокамеры теряют схват 18 манипулятора 15 из виду. А также обзорная видеокамера 7 обеспечивает съемку надводной обстановки при транспортировке собранных подводных образцов по поверхности воды при подходе подводного аппарата к судну.
Движительно-рулевой комплекс состоит из двух групп движителей: горизонтальной и вертикальной. Горизонтальная группа движителей состоит из четырех движителей 2. Оси вращения движителей 2 расположены в одной плоскости и находятся под регулируемым углом к продольной оси подводного аппарата. Благодаря такому расположению движителей обеспечивается управление подводным аппаратом по курсу, а также осуществляются маршевое и лаговое перемещение подводного аппарата. Регулировка расположения движителей позволяет изменять суммарный вектор тяги по маршевому и лаговому направлениям. Расположение движителей 2 горизонтальной группы является симметричным относительно продольной плоскости, проходящей через центр тяжести МТПА (фиг.1). Оси вращения движителей 3 вертикальной группы параллельны вертикальной оси подводного аппарата и расположены симметрично относительно продольной и поперечной плоскостей МТПА (фиг.2). Установочные фланцы 4 вмонтированы в блок плавучести 14 таким образом, что движители 3 жестко прикреплены непосредственно к ним и имеют геометрическое расположение, позволяющее управлять вертикальным движением подводного аппарата, а также угловым движением по крену и дифференту.
Блок управления движительно-рулевым комплексом размещен в одном из герметичных контейнеров 5, расположенном в нижней части рамы подводного аппарата с правой стороны. Во втором герметичном контейнере 5, расположенном в нижней левой части МТПА, находятся основные электронные платы управления МТПА, навигационные датчики магнитного курса, крена, дифферента и угловой скорости рыскания.
Датчик глубины 11 и датчик температуры 12 представлены отдельными герметичными устройствами.
Система компенсации забортного давления состоит из двух компенсаторов 13, расположенных в нижней кормовой части МТПА.
Токоподводящий кабель связи 20 закреплен на раме 1 в кормовой части МТПА в его диаметральной плоскости в точке ее пересечения с плоскостью расположения горизонтальной группы движителей.
Комплектацию подводного аппарата можно изменять, дополнительно устанавливая различную аппаратуру.
Работа подводного аппарата осуществляется следующим образом. Спущенный на воду МТПА за счет положительной плавучести находится на поверхности воды, и работающая обзорная видеокамера 7 производит обзор надводной обстановки. Далее включают вертикальные движители 3 и МТПА производит заглубление на заданную оператором глубину, при этом данные о глубине погружения получают с помощью встроенного в конструкцию МТПА датчика глубины 11. При выходе на заданную глубину или одновременно с погружением производится движение подводного аппарата в горизонтальной плоскости с помощью горизонтальной группы движителей 2. Здесь желаемое движение подводного аппарата задает оператор. Команды управления движителями рассчитываются в блоке специализированного вычислителя, расположенного в блоке электроники. Далее эти команды поступают на блоки управления приводов соответствующих движителей. В соответствии с выработанными спецвычислителем законами управления движительно-рулевой комплекс их отрабатывает, формируя управляющие воздействия и обеспечивая движение аппарата по заданной траектории. Благодаря выбранной компоновки горизонтальной группы движителей 2 возможны следующие движения МТПА в горизонтальной плоскости: маршевое движение, лаговое движение, поворот по курсу. Вертикальная группа движителей 3 позволяет производить погружение-всплытие МТПА, а также стабилизировать его по углам крена и дифферента. Стабилизация глубины погружения осуществляется группой вертикальных движителей 3 по показаниям датчика глубины 11. В погруженном состоянии МТПА производит видеосъемку с помощью стационарной черно-белой широкоугольной высокочувствительной видеокамеры 10 или с помощью обзорной видеокамеры 7, установленной на кронштейне 8. Освещение включают по необходимости. В зависимости от условий включают вместе обзорную видеокамеру 7 и стационарную черно-белую видеокамеру 10. При обнаружении объекта поиска МТПА зависает над ним или производит обследование объекта с разных сторон, производя видеосъемку. При необходимости подвижный манипулятор 15, снабженный схватом 18, по команде оператора производит захват обнаруженного подводного объекта 22. Расположенная на одной оси с манипулятором 15 видеокамера 9 производит видеосъемку процессов, происходящих в области работы схвата 18. Далее, манипулятор 15 со схваченным подводным объектом 22 производит вращательное движение в вертикальной плоскости аппарата вокруг оси вала 17 привода 16 манипулятора 15 до того положения, пока схват 18 с подводным объектом 22 не окажется над перфорированным контейнером 19 подводного аппарата. Расположение схвата 18 манипулятора 15 относительно перфорированного контейнера 19 контролируется с помощью обзорной видеокамеры 7. Далее производится разжатие схвата 18 манипулятора 15 и подводный объект 22 падает в съемный перфорированный контейнер 19. Всплытие подводного аппарата после окончания миссии осуществляется с помощью вертикальных движителей 3, манипулятор 15 при этом приводится в транспортное положение, при котором схват 18 манипулятора 15 располагают над перфорированным контейнером 19 подводного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| Устройство для осуществления глубоководного контроля за подводной средой и подводно-техническими работами | 2019 |
|
RU2728888C1 |
| ПРИТАПЛИВАЕМЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ИЗМЕРИТЕЛЬНЫХ И ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2011 |
|
RU2468959C1 |
| Подводный аппарат | 2016 |
|
RU2703558C1 |
| Многофункциональное устройство для осуществления глубоководного контроля за подводной средой и подводно-техническими работами | 2021 |
|
RU2760985C1 |
| Автоматическое устройство для развертывания и свертывания донной антенны под водой и под ледовым покровом | 2016 |
|
RU2640896C1 |
| ТЕЛЕУПРАВЛЯЕМЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2024 |
|
RU2829517C1 |
| ПЛАТФОРМА-АМФИБИЯ ДЛЯ ПЕРЕМЕЩЕНИЯ, ПОЗИЦИОНИРОВАНИЯ И НЕПОДВИЖНОГО БАЗИРОВАНИЯ РАБОЧИХ СРЕДСТВ И МЕХАНИЗМОВ В ХОДЕ ОСУЩЕСТВЛЕНИЯ РАБОТ | 2010 |
|
RU2468932C2 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |

Изобретение относится к области подводной техники. Малогабаритный телеуправляемый подводный аппарат содержит раму модульной конструкции, блок плавучести, установленный в верхней части подводного аппарата, движители горизонтального и вертикального хода, светильники, обзорную видеокамеру, установленную посредством кронштейна над поверхностью блока плавучести, стационарную черно-белую видеокамеру. В верхней части подводного аппарата соосно с его вертикальной осью установлен перфорированный контейнер для сбора подводных образцов. Подводный аппарат содержит также снабженный охватом манипулятор и герметичный привод, при этом манипулятор установлен на выходном валу привода. На свободном конце выходного вала привода манипулятора установлена видеокамера таким образом, что ее ось визирования постоянно направлена в центр охвата манипулятора. Повышается эффективность сбора подводных образцов и подъема их на поверхность без ухудшения при этом остойчивости и маневренных качеств самого аппарата. 3 з.п. ф-лы, 4 ил.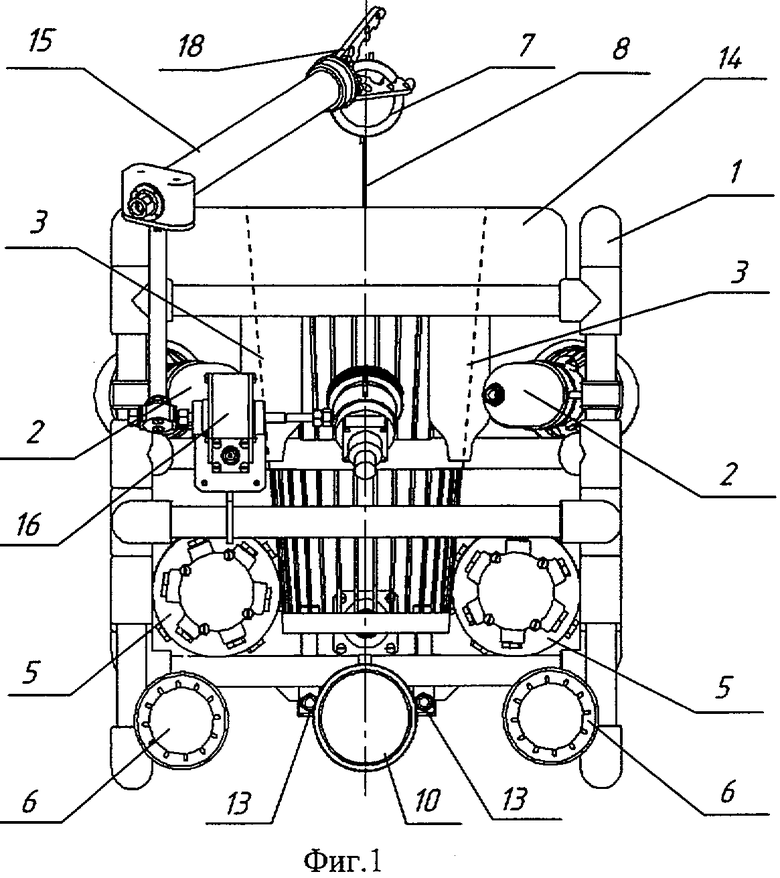
1. Малогабаритный телеуправляемый подводный аппарат, содержащий раму модульной конструкции, движители горизонтального и вертикального хода, прочные герметичные контейнеры для размещения электронной части подводного аппарата, светильники, обзорную и стационарную видеокамеры, датчики глубины и температуры, компенсаторы давления, блок плавучести, установленный в верхней части подводного аппарата, манипуляционный модуль, включающий снабженный охватом манипулятор и герметичный привод, причем манипулятор установлен на выходном валу этого привода, надводный модуль управления, включающий пульт управления, источник электропитания, блок отображения видеоинформации, и кабель связи, соединяющий подводный аппарат с надводным модулем, отличающийся тем, что на другом конце выходного вала привода манипулятора дополнительно установлена видеокамера так, что ее ось визирования постоянно направлена в центр схвата манипулятора, подводный аппарат снабжен съемным перфорированным контейнером для сбора образцов, установленным в верхней части подводного аппарата соосно с его вертикальной осью, а обзорная видеокамера установлена посредством кронштейна над блоком плавучести в диаметральной плоскости подводного аппарата в его кормовой части.
2. Малогабаритный телеуправляемый подводный аппарат по п.1, отличающийся тем, что рама модульной конструкции выполнена герметичной из полипропиленовых труб.
3. Малогабаритный телеуправляемый подводный аппарат по п.1, отличающийся тем, что съемный перфорированный контейнер для сбора образцов выполнен в виде перевернутого усеченного конуса.
4. Малогабаритный телеуправляемый подводный аппарат по п.1, отличающийся тем, что кабель связи закреплен на раме в кормовой части подводного аппарата в его диаметральной плоскости в точке ее пересечения с плоскостью расположения горизонтальной группы движителей.
| US 2007283871 A1, 13.12.2007 | |||
| US 4721055 A, 26.01.1988 | |||
| KR 20030088796 A, 20.11.2003 | |||
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2104210C1 |

