Изобретение относится к технике исследования подводных объектов и может быть использовано для контроля состояния внутренних помещений и полостей затонувших судов, изучения морского дна и построек на нем, а также для демонстрации подводных представлений, создания подводных фильмов и т.д.
Известен подводный аппарат, содержащий корпус, устройство задания плавучести, электронный блок, подключенный к кабелю, размещенному на катушке внутри подводного аппарата (1).
Этот известный подводный аппарат не способен самостоятельно перемещаться под водой кроме своего всплытия. Это существенно ограничивает возможность использования известного аппарата в качестве подводного робота. Кроме того, объем информации, которая может быть получена с помощью этого технического решения, весьма ограничен, поскольку всплывший буй сигнализирует лишь о месте расположения подводного объекта.
Известен телеуправляемый подводный аппарат с устройством для обеспечения его маневренности, содержащий электронный блок, расположенный внутри корпуса телеуправляемого подводного аппарата и предназначенный для управления телеуправляемым подводным аппаратом от пульта оператора и передачи информационных сигналов к пульту оператора, двигатели привода телеуправляемого подводного аппарата, видеокамеру, осветители, установленные внутри корпуса и подсоединенные к электронному блоку, кабель, соединенный с пультом оператора, расположенным вне корпуса телеуправляемого подводного аппарата, и соединенный с электронным блоком, накопитель кабеля, выполненный в виде полого барабана, установленного в кормовой части телеуправляемого подводного аппарата и на внешней поверхности которого расположен в намотке упомянутый кабель (2).
Это устройство имеет ряд преимуществ перед известными:
Во-первых, оно позволяет придать телеуправляемому подводному аппарату повышенную маневренность при одновременном увеличении радиуса его действия, за счет применения оптоволоконного кабеля в полиэтиленовой оболочке, обеспечивающего нулевую плавучесть кабеля;
Во-вторых, благодаря намотке кабеля на накопительном устройстве с подкручиванием, противоположным направлению намотки, а также введению направляющей для кабеля с механизмом поворота оси по касательной к траектории движения, удается исключить влияние кабеля на мореходные качества телеуправляемого подводного аппарата.
Известный телеуправляемый подводный аппарат с устройством для обеспечения его маневренности имеет ограничение, которое заключается в том, что накопитель кабеля способен только отдавать находящийся в нем кабель в пассивном режиме, т.е. разматываться под действием натяжения кабеля при движении аппарата. Такая особенность создает большую вероятность зацепления кабеля за какие-либо выступы и крюки внутри исследуемых объектов или неровности дна. Возвращение аппарата на поверхность при зацеплении кабеля за какие-либо предметы становится невозможным, и весь телеуправляемый подводный аппарат - достаточно сложное и дорогостоящее устройство, теряется для пользования. Еще одним недостатком известного устройства является сложность (высокая трудоемкость) подготовки телеуправляемого подводного аппарата к повторному использованию после смотки кабеля с накопителя в процессе эксплуатации аппарата.
Решаемая изобретением задача - повышение технико-эксплуатационных качеств телеуправляемого подводного аппарата, улучшение маневренности, расширение арсенала технических средств для повышения надежности функционирования и работоспособности подводного аппарата.
Технический результат, который может быть получен при выполнении изобретения, - уменьшение вероятности зацепления кабеля телеуправляемого подводного аппарата во время его движения при обследовании различных подводных объектов, увеличение протяженности маршрута в подводном исследуемом объекте при заданной длине кабеля, обеспечение возможности неоднократного изменения маршрута телеуправляемого подводного аппарата в исследуемом объекте, а также обеспечение сохранности телеуправляемого подводного аппарата при исследовании сложных по форме подводных объектов.
Для решения поставленной задачи с достижением указанного технического результата в известном телеуправляемом подводном аппарате с устройством для обеспечения его маневренности, содержащем электронный блок, расположенный внутри корпуса телеуправляемого подводного аппарата и предназначенный для управления телеуправляемым подводным аппаратом от пульта оператора и передачи информационных сигналов к пульту оператора, по меньшей мере, один двигатель привода телеуправляемого подводного аппарата, видеокамеру, осветитель, установленные внутри корпуса и подсоединенные к электронному блоку, кабель, соединенный с пультом оператора, расположенным вне корпуса телеуправляемого подводного аппарата, и соединенный с электронным блоком, накопитель кабеля, выполненный в виде полого барабана, установленного в кормовой части телеуправляемого подводного аппарата и на внешней поверхности которого расположен в намотке упомянутый кабель, согласно изобретению введен электродвигатель, управляющий вход которого соединен с выходом управления электродвигателем электронного блока, выходной вал электродвигателя соединен с приводом полого барабана, накопитель кабеля снабжен неподвижной трубкой, установленной коаксиально внутри полого барабана, кабель расположен вдоль оси внутри неподвижной трубки, выведен на ее внешнюю поверхность и расположен в намотке на ней, причем направление намотки на внешней поверхности неподвижной трубки выполнено в противоположном направлении по отношению к намотке на внешней поверхности полого барабана при вращении и намотке кабеля на полый барабан электродвигателем, конец кабеля, расположенный внутри неподвижной трубки, соединен с электронным блоком, при этом расположенный в намотке на неподвижной трубке кабель выведен на внешнюю поверхность полого барабана, а конец кабеля с внешней поверхности полого барабана соединен с пультом оператора.
Возможен дополнительный вариант выполнения устройства, в котором целесообразно, чтобы был введен герметичный разъем, расположенный вне корпуса телеуправляемого подводного аппарата, конец кабеля с внешней поверхности полого барабана соединен с пультом оператора через упомянутый герметичный разъем.
В другом дополнительном варианте выполнения устройства упомянутый электродвигатель выполнен реверсивным.
Кроме того, в дополнительном варианте накопитель кабеля выполнен в виде полого барабана, ось вращения которого может быть расположена под углом к продольной оси корпуса телеуправляемого подводного аппарата, например, перпендикулярно к траектории движения аппарата, что снижает вероятность образования мест потенциального перелома кабеля, или под любым другим углом к траектории движения телеуправляемого подводного аппарата. Выполнение накопителя кабеля в виде полого барабана, в частном случае, расположенного перпендикулярно продольной оси корпуса аппарата, позволяет избежать образования перегибов в процессе смотки кабеля и, тем самым, уменьшить вероятность зацепления кабеля за препятствия внутри исследуемого объекта. За счет того, что конец кабеля, соединенного с электронным модулем, предварительно пропущен внутри неподвижной трубки и выведен через ее отверстие к электронному модулю, обеспечивается неподвижный электрический контакт кабеля с электронным модулем, что позволяет улучшить надежность контакта по сравнению с различными видами подвижных контактов кабеля с входами/выходами электронных блоков.
Упомянутый электродвигатель может быть выполнен реверсивным, при этом обеспечивается многофункциональный режим работы накопителя приемки или отдачи кабеля, что обеспечивает высокую маневренность телеуправляемого подводного аппарата в любых выбранных оператором направлениях.
При использовании заявленного устройства внешний пульт оператора может быть оснащен системой воспроизведения и записи видеоизображений, в том числе и трехмерных, что позволяет работать при управлении телеуправляемым подводным аппаратом во всем полном объеме исследуемого пространства.
Обеспечение приводу вращения полого барабана трех режимов работы: "намотка", "смотка" и "запрет вращения" также уменьшает вероятность зацепления кабеля, так как исключаются свободные, "провисшие" участки кабеля, возникающие в процессе движения телеуправляемого подводного аппарата известной конструкции, так как при заявленном техническом решении кабель свободно отдается с полого барабана наружу аппарата только при необходимости продвижения телеуправляемого подводного аппарата вперед, а при его возвращении в местоположение, близкое к первоначальному, кабель опять убирается во внутрь корпуса на накопитель кабеля.
Кроме того, три режима работы полого барабана, "приемка кабеля", "отдача кабеля", "запрет приемки/отдачи кабеля", задаваемые от пульта оператора через электронный блок электродвигателю, обеспечивают увеличение радиуса обзора аппаратом без зацепления кабеля при той же длине кабеля, т.к. при режиме "намотка" кабеля аппарат имеет возможность вернуться на исходную точку своего маршрута (откуда начинался обзор), далее направиться по другой траектории и т.д., что в конечном счете увеличивает радиус обзора без зацеплений и увеличивает общую протяженность маршрута.
Указанные преимущества, а также особенности изобретения поясняются лучшим вариантом его выполнения со ссылками на прилагаемые чертежи.
Фиг. 1 схематично изображает телеуправляемый подводный аппарат в толще морской воды;
фиг. 2 - устройство для обеспечения маневренности телеуправляемого подводного аппарата (схематично, в продольном разрезе).
На фиг. 1 показаны надводный корабль сопровождения с пультом 1 оператора, кабель 2, объект 3 исследования (показан пунктиром), герметичный разъем 4, корпус 5 телеуправляемого подводного аппарата, двигатели 6 привода телеуправляемого подводного аппарата, видеокамера 7, осветители 8, электронный блок 9 для обработки сигналов управления и передачи результатов измерения, накопитель 10 кабеля 2, электродвигатель 11.
На фиг. 2 изображен полый барабан 12 накопителя 10 с установленной в нем коаксиально неподвижной трубкой 13. Полый барабан 12 приводится во вращение электродвигателем 11, снабженным любым известным механизмом для передачи вращения полому барабану 12 от вала электродвигателя 11, в направлении w при смотке кабеля 2 с полого барабана 12. При намотке кабеля 2 он размещается на поверхности полого барабана 12, а предварительно намотанный на неподвижную трубку 13 кабель 2 (показан петлями на оси) сматывается и образует петлю внутри полого барабана 12. Радиус намотки кабеля 2 на неподвижной трубке 13 - R1, на поверхности полого барабана 12 - R2.
Телеуправляемый подводный аппарат с устройством для обеспечения его маневренности (фиг. 1, 2) работает следующим образом.
В районе работ осуществляется спуск корпуса 5 телеуправляемого подводного аппарата до объекта 3 исследования. Далее с помощью оператора с пульта 1 производится введение корпуса 5 в объект 3 в автономном режиме с помощью двигателей 6 привода телеуправляемого подводного аппарата. При этом происходит свободная смотка запаса длины кабеля 2 с внешней поверхности полого барабана 12 за счет действия двигателей 6 и перемещения корпуса 5 под водой в соответствии с известным техническим решением (2). Кабель 2 может быть намотан с подкруткой и выполнен из оптоволоконного кабеля в полиэтиленовой оболочке, обеспечивающего нулевую плавучесть кабеля, сохраняя тем самым все положительные качества маневренности ранее известного устройства (2). Стрелкой А (фиг. 2) показан конец кабеля 2, направленный к пульту 1 оператора для управления телеуправляемым подводным аппаратом. Процесс движения корпуса 5 телеуправляемого подводного аппарата (фиг. 1) контролируется оператором на корабле сопровождения или с берега или с подводной лодки с помощью видеокамеры 7 телеуправляемого подводного аппарата, при этом электродвигатель 11 отключен от полого барабана, и кабель 2 свободно сматывается под действием собственного натяжения (силы двигателей 6).
В случае проникновения корпуса 5 телеуправляемого подводного аппарата в большой внутренний объем объекта 3, который необходимо исследовать, оператор переводит режим привода электродвигателя 11 в положение "запрет", электродвигатель 11 отключен, и корпус 5 телеуправляемого подводного аппарата движется внутри объекта 3 за счет свободной длины "петли" кабеля 2 внутри этого объема.
При возвращении корпуса 5 телеуправляемого подводного аппарата в некоторое выбранное оператором исходное местоположение внутри объекта 3 двигатели 6 отключаются, электродвигатель 11 включается, режим привода переводится в положение "намотка" и весь израсходованный на маршруте кабель 2 наматывается на внешнюю поверхность полого барабана 12 (фиг. 2), тем самым убирается внутрь корпуса 5 телеуправляемого подводного аппарата на накопитель 10. Кабель 2, ранее намотанный на неподвижную трубку 13, в этом случае сматывается и образует свободную петлю внутри полого барабана 12. Предварительная намотка части кабеля 2 на неподвижную трубку 13 (относительно оси вращения полого барабана 12 как бы являющуюся его продольной осью) позволяет сделать неподвижным контакт кабеля 2 с электронным блоком 9, так как он проходит к нему через не вращающуюся ось. Это позволяет тем самым значительно увеличить надежность работы самого телеуправляемого подводного аппарата и исключить неприятности, возникающие при работе скользящих контактов.
Поскольку количества витков кабеля 2, способных разместиться на внешней поверхности полого барабана 12 и на внешней поверхности неподвижной трубки 13, примерно равны, а их радиусы могут быть выбраны различающимися более чем на два порядка (например, R2 > 100 R1), то длина кабеля 2 на накопителе 10 может на практике достигать нескольких сотен метров. Принимая во внимание, что намотка на неподвижную трубку 13 внутри полого барабана 12 без особого увеличения риска может осуществляться с момента возникновения петли и в обратном направлении, то реально достигаемая длина маршрута внутри объекта 3 может достигать 500 - 700 м, что более чем достаточно для реальных условий применения телеуправляемого подводного аппарата при исследовании различных объектов 3, например таких, как затонувшие суда, причалы, опоры мостов, подводные гроты и т.п.
Выполнение электродвигателя 11 реверсивным позволяет обеспечить все необходимые режимы при управлении корпусом 5 телеуправляемого подводного аппарата, такие как "приемка кабеля", "отдача кабеля", "запрет приемки/отдачи кабеля", что позволяет при соответствующем управлении с пульта 1 оператора осуществлять проникновение корпуса 5 в различные сложные по своей конфигурации объемы пространства объекта 3.
При расположении оси вращения полого барабана 12 накопителя 10 кабеля 2 перпендикулярно продольной оси корпуса 5 телеуправляемого подводного аппарата (фиг. 1) или под углом к этой продольной оси в режимах "приемка кабеля", "отдача кабеля" происходит смотка/намотка кабеля 2 на накопитель 10 без образования петель, перекруток, "бороды", которые обычно образуются, например, в спиннинговых катушках или других инерционных механизмах, т.к. в этом случае обеспечивается равномерный сход или намотка кабеля 2 на накопителе 10.
Однако, могут возникнуть ситуации, в которых из- за неопытности оператора или из-за очень сложной конфигурации объема пространства объекта 3 исследования все таки происходит зацепка кабеля 2 за какое-либо препятствие. Введение герметичного разъема 4, расположенного вне корпуса 5 телеуправляемого подводного аппарата, позволяет избежать потери дорогостоящего телеуправляемого подводного аппарата. При зацеплении кабеля 2 за препятствие оператор при помощи двигателей 6 ориентирует корпус 5 телеуправляемого подвижного аппарата в ту часть объекта 3, которая имеет выход из замкнутого пространства. Герметичный разъем 4 выполнен таким, что способен разъединяться от усилия, значительно превышающего тяговую силу двигателей 6 перемещения корпуса 5. (Механизм задания плавучести на фиг. 1 не показан и может быть выполнен известным образом, например, для сброса плавучести - выталкивание шариков с положительной плавучестью, а для увеличения плавучести - выталкивание шариков с отрицательной плавучестью). Оператор дает команду на включение двигателей 6 и на всплытие корпуса 5 телеуправляемого подводного аппарата и тянет за конец кабеля 2, подсоединенный к пульту 1. Герметичный разъем 4 разъединяется, и телеуправляемый подводный аппарат покидает замкнутое пространство объекта 3.
Наиболее успешно заявленный телеуправляемый подводный аппарат с устройством для обеспечения его маневренности промышленно применим в качестве технического средства, обеспечивающего возможность передвижения и лавирования телеуправляемого подводного аппарата внутри подводных объектов сложной конфигурации для создания подводного робота, а также в коммерческих целях для демонстрации подводных представлений и съемки подводных фильмов.
Источники информации
1. Заявка Франции N 2219659, В 63 С 7/26, опубл. 1974 г.
2. Патент Российской Федерации N 2127207, В 63 С 11/48, опубл. 1999 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕУПРАВЛЯЕМЫЙ ОСМОТРОВЫЙ ПОДВОДНЫЙ АППАРАТ | 1995 |
|
RU2127207C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| ОПТИЧЕСКИЙ СПЕКТРОМЕТР И АКУСТООПТИЧЕСКАЯ ЯЧЕЙКА, ВХОДЯЩАЯ В ЕГО СОСТАВ | 1996 |
|
RU2092797C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |

Изобретение относится к технике исследования подводных объектов и может быть использовано для контроля состояния внутренних помещений и полостей затонувших судов и других подводных работ. Аппарат содержит электронный блок, по меньшей мере один двигатель привода, соединенный с электронным блоком кабель для управления аппаратом с расположенного вне его корпуса пульта оператора и накопитель кабеля, выполненный в виде установленного в корме аппарата полого барабана и снабженный неподвижной трубкой, установленной коаксиально внутри полого барабана. Кабель расположен вдоль оси внутри неподвижной трубки, выведен на ее внешнюю поверхность, где расположен в намотке на ней, а затем выведен на внешнюю поверхность полого барабана, где также расположен в намотке на ней. Направление намотки на внешней поверхности неподвижной трубки выполнено в противоположном направлении по отношению к намотке на внешней поверхности полого барабана, соединенного с электродвигателем его вращения. Устройство позволяет улучшить маневренность подводного аппарата. 3 з.п. ф-лы, 2 ил.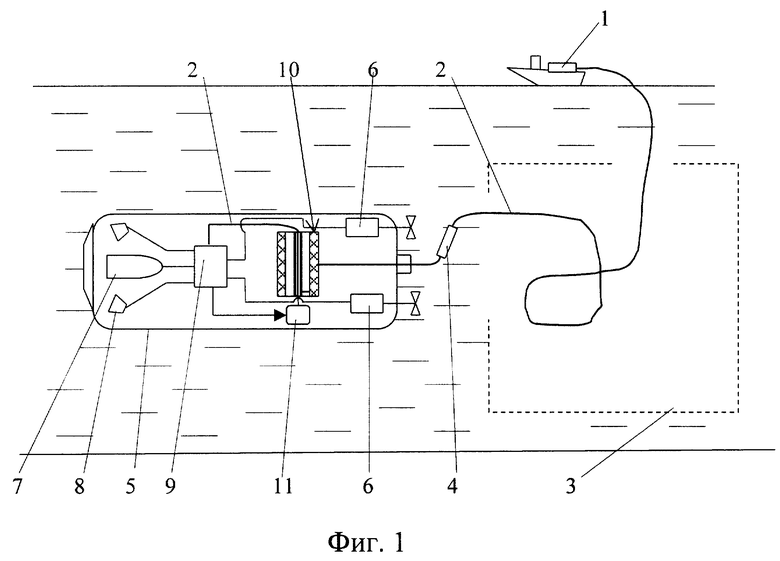
| ТЕЛЕУПРАВЛЯЕМЫЙ ОСМОТРОВЫЙ ПОДВОДНЫЙ АППАРАТ | 1995 |
|
RU2127207C1 |
| Сварочный материал | 1986 |
|
SU1447619A1 |
| ПУЛЬТ ВЫБОРА СИСТЕМ | 2004 |
|
RU2270141C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТАТОРА ОДНОВИНТОВОГО НАСОСА | 2006 |
|
RU2325557C1 |
| US 3550386 A, 29.12.1970. | |||

