Изобретение относится к судостроению, в частности к быстроходным судам, оборудованным управляемыми интерцепторами и движущимися в переходном режиме или режиме глиссирования.
Известны быстроходные суда, у которых для уменьшения угла дифферента (для преодоления горба сопротивления или уменьшения перегрузки при движении на волнении) используются управляемые транцевые плиты (Справочник по малотоннажному судостроению. - Л. : Судостроение, 1988. - 576 с., см. с. 278 - 280). Недостатком таких судов является то, что транцевые плиты должны быть достаточно больших размеров и иметь мощный привод для их быстрого отклонения.
Известно также быстроходное судно (прототип) по патенту РФ N 1837522 (B 63 B 1/20, опубл. 1995 г.), которое оборудовано управляемыми носовыми и кормовыми интерцепторами, установленными поперек днища и выдвигаемыми в поток из-за задних кромок носового редана и транцевой плиты соответственно. При выдвиге кормовых интерцепторов в поток на интерцепторы и транцевую плиту начинают действовать значительные силы, пропорциональные выдвигу интерцепторов и скоростному напору. Так при ширине (размахе) транцевой плиты 4 м и ее длине 0,8 м (площадь 3,2 м2 ) и максимальном выдвиге кормовых интерцепторов 80 мм на скорости хода судна 50 узлов на транцевую плиту судна водоизмещением 120 т действует подъемная гидродинамическая сила, равная 408627 Н (≈ 41,68 тс!), а на интерцепторы общей площадью 4•0,08 = 0,32 м2 - сила сопротивления, равная 71253 Н (≈ 7,27 тс!). При таких силах вдоль задней кромки транцевой плиты обязательно должна быть сделана отбортовка, а между транцем и транцевой плитой установлены подкрепления в виде книц. Т.е. конструкция транцевой плиты получается пространственной и может быть реализована лишь в случае, если за транцем нет других устройств, таких как рулевое устройство водометных движителей или валов с частично погруженными гребными винтами (ЧПГВ) и гидроприводом для изменения их положения в горизонтальной и вертикальной плоскостях.
Другим недостатком прототипа является то, что при приварке к транцу и транцевой плите подкрепляющих книц и полос происходит деформация конструкции и требуется большой объем доводочных работ, чтобы обеспечить в условиях стапеля зазор 0,5. ..1 мм между задней кромкой транцевой плиты и интерцепторами по всему размаху плиты и при различных положениях интерцепторов.
Технический результат от внедрения описываемого изобретения состоит:
- в уменьшении размеров и массы транцевой плиты и интерцепторов, что позволяет их применять на быстроходных судах с любыми движителями (водометами, полностью или частично погруженными гребными винтами), т.е. применять и в случаях, когда к высоте и длине транцевой плиты и интерцепторов предъявляются жесткие требования со стороны движителей;
- в сокращении объема доводочных работ, обеспечивающих необходимые минимальные зазоры 0,5...1 мм между задней кромкой транцевой плиты и рабочей поверхностью интерцепторов;
- в сокращении объема и облегчении работ по обеспечению электроизоляции между транцем и устанавливаемыми опорами-направляющими, транцевой плитой и интерцепторами, если они выполнены из сплавов, при соприкосновении которых с материалом транца возникает электрохимическая коррозия;
- в обеспечении возможности установки транцевой плиты с интерцепторами на уже построенные и эксплуатирующиеся быстроходные суда.
Такой технический результат достигается тем, что у быстроходного судна, содержащего корпус с транцем и транцевой плитой, за которой установлены управляемые интерцепторы, а также движитель,
транцевая плита выполнена в виде съемных секций по числу интерцепторов, каждая из которых с помощью фиксаторов закреплена заподлицо с поверхностью днища на опорах-направляющих, установленных в нижней части транца судна, при этом ширина каждой секции транцевой плиты равна размаху соответствующего интерцептора, и в каждой секции выполнены открытые со стороны задней кромки транцевой плиты и перпендикулярные к ней щели по числу пластин подвески интерцептора,
каждый интерцептор с помощью пластин подвески, установленных в щелях секции транцевой плиты, шарнирно закреплен на ней с возможностью углового перемещения вниз и сохранения минимального зазора между интерцептором и задней кромкой секции транцевой плиты.
В случае выполнения опор-направляющих с крепежными деталями и транцевой плиты с интерцепторами из сплавов, при соприкосновении которых с материалом транца возникает электрохимическая коррозия, опоры-направляющие с крепежными деталями и транцевую плиту с интерцепторами электроизолируют от транца.
Наиболее весомо уменьшение размеров и массы транцевой плиты проявляется на быстроходных судах, у которых в качестве движителя использованы либо водометные движители, установленные на транце судна и оборудованные реверсивно-рулевыми устройствами, либо частично погруженные гребные винты, установленные снаружи на транце судна и оборудованные приводами для изменения их положения в горизонтальной и вертикальной плоскостях.
Изобретение поясняется чертежами на примере быстроходного судна, у которого в качестве движителей используются частично погруженные гребные винты, установленные за транцевой плитой и оборудованные гидроприводом для изменения их положений в вертикальной и горизонтальной плоскостях.
На фиг. 1 на виде снизу представлено быстроходное судно с предлагаемой транцевой плитой и кормовыми интерцепторами для случая, когда в качестве движителя используются частично погруженные гребные винты с гидроприводом для изменения положения винтов в горизонтальной и вертикальной плоскостях.
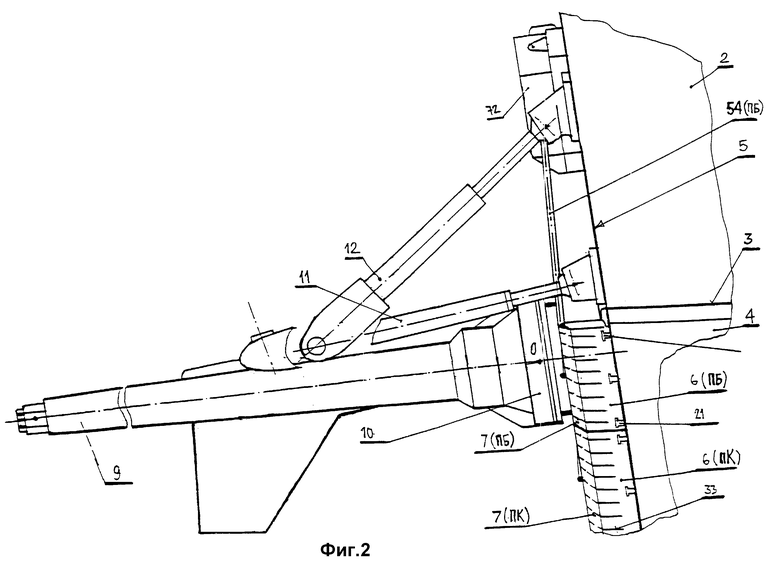
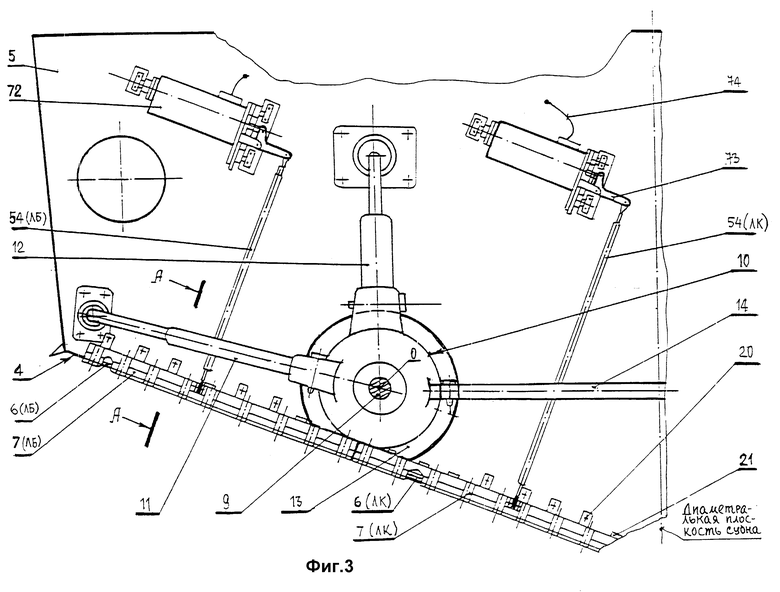
На фиг. 2 и 3 на видах сбоку и сзади соответственно показана кормовая часть судна, представленного на фиг. 1.
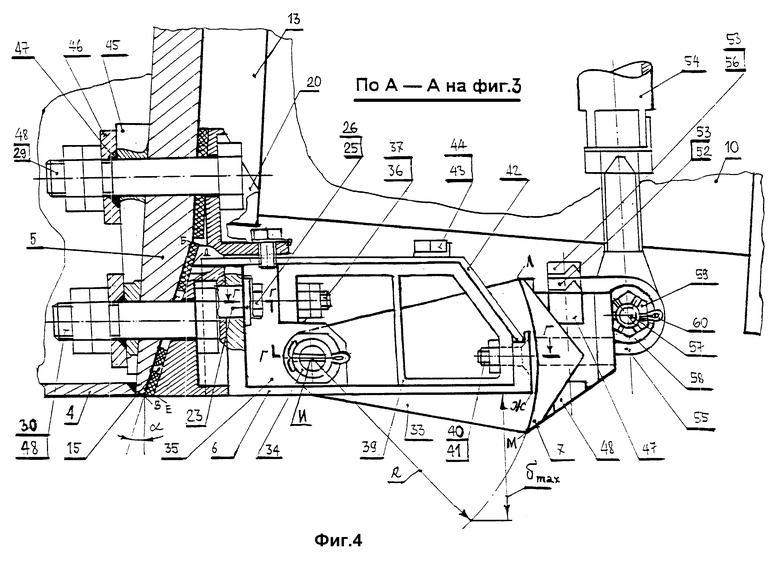
На фиг. 4 дан разрез кормовой части судна по плоскости А-А на фиг. 3.
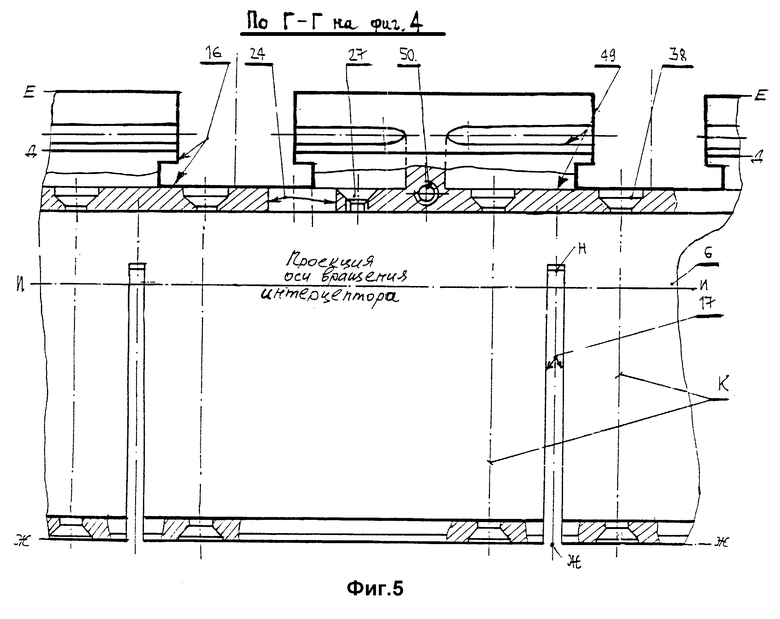
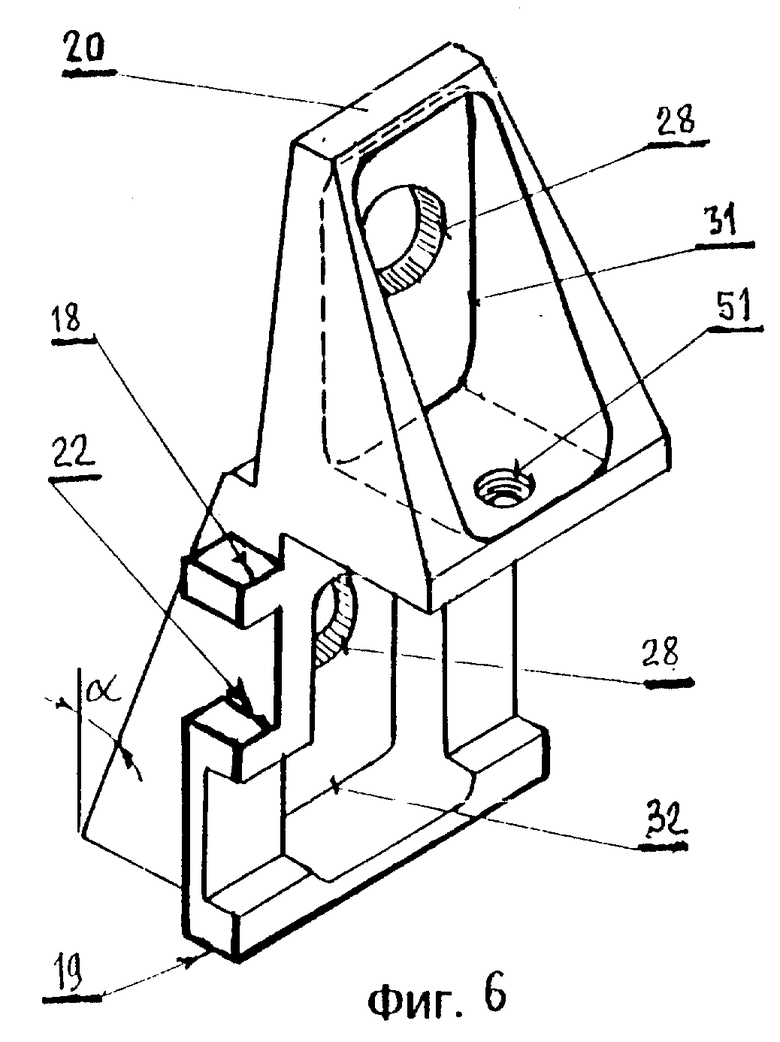
На фиг. 6 на виде сверху показан фрагмент секции предлагаемой транцевой плиты с сечением по плоскостям Г-Г на фиг. 4.
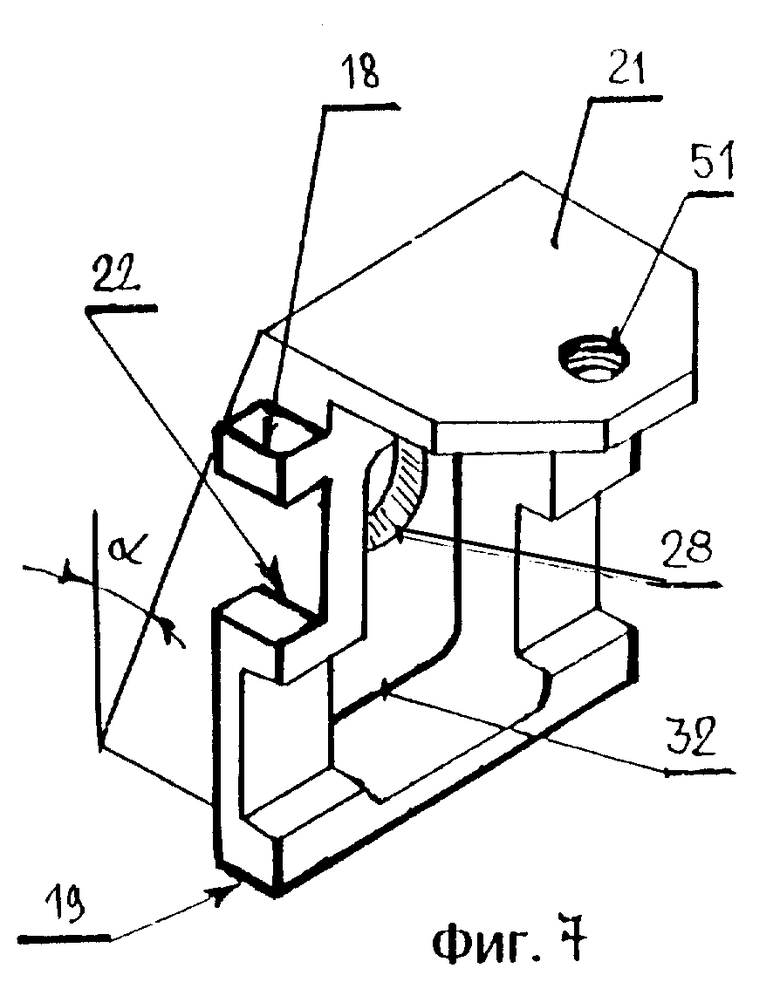
На фиг. 6 и 7 в изометрии представлены опоры-направляющие с двумя и одним отверстием соответственно, которые используются для крепления транцевой плиты к транцу быстроходного судна.
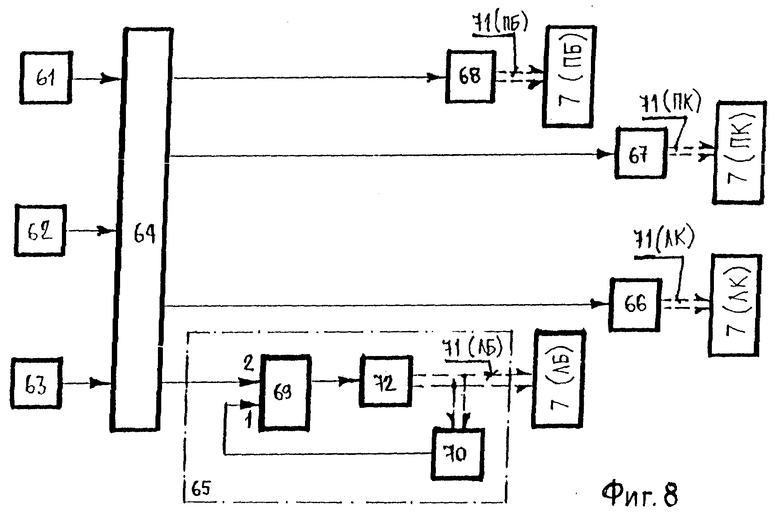
На фиг. 8 показана блок-схема системы управления интерцепторами.
Быстроходное судно 1 (фиг. 1-4) содержит корпус 2 с остроскулыми обводами 3, килеватым днищем 4 и транцем 5. За транцем 5 заподлицо с днищем 4 установлена транцевая плита 6 и кормовые интерцепторы 7. Количество интерцепторов 7 и секций транцевой плиты 6 (ширина каждой секции равна размаху интерцептора) зависит от ширины транца 5 по скуле 3 и может быть равным 2, 4, 6 и 8. На фиг. 1, 2, 3 и 8 показано 4 кормовых интерцептора 7, которые в зависимости от своего расположения помечены дополнительными буквами в скобках: ЛБ - левый бортовой, ЛК - левый килевой, ПК - правый килевой, ПБ - правый бортовой. Аналогичные обозначения использованы для секций транцевой плиты 6 и других элементов комплекса, если они отличаются друг от друга своими размерами или конструкцией. Например, секции транцевой плиты 6 на представленных фигурах имеют разную ширину (размах) и разную конструкцию. Преимущества предлагаемой транцевой плиты 6 и интерцепторов 7 наиболее наглядно видно в случае, когда на судне 1 в качестве движителя используются частично погруженные гребные винты 8 (левого и правого вращения), которые устанавливаются на валах 9 в опорах 10 и снабжены управляемыми гидроприводами 11 для отклонения валов (относительно точки O на фиг. 2) в горизонтальной плоскости (управление судном по курсу) и управляемыми гидроприводами 12 для раздельного изменения наклона валов (относительно точки O) в вертикальной плоскости. Для крепления опор 10 на транце 5 они снабжены фланцами 13. Для согласованного отклонения валов 9 в горизонтальной плоскости они соединены друг с другом с помощью шарнирно закрепленной поперечины 14. Жесткие требования к высоте и длине транцевой плиты 6 и интерцепторов 7 определяются тем, что валы 9 должны быть установлены как можно ближе к нижней кромке транца 5, а транец иметь угол на клона порядка 3...6o. В этом случае свободной для установки транцевой плиты 6 оказывается узкая полоска (фаска БВ) вдоль нижней кромки транца 5, которая имеет высоту порядка 45...60 мм и необходима для обеспечения условий сварки листов разной толщины (днище 4 имеет толщину 4...5 мм, а транец 5 - 16...20 мм) (фиг. 4).
Конструкция транцевой плиты 6 показана на фиг. 4 и 5. В передней части транцевой плиты 6, которая по плоскости ДЕ крепится через прокладку 15 к плоскости БВ транца 5, выполнены Т-образные пазы 16, а в задней части со стороны задней кромки ЖЖ прорезаны щели 17. Форма Т-образного паза 16 соответствует формам Т-образных выступов (направляющих) 18 (верхний) и 19 (нижний) опор-направляющих 20 и 21, изображенных на фиг. 6 и 7. Паз 22, который расположен между выступами 18 и 19, предусмотрен для размещения в нем фиксаторов 23, которые позволяют зафиксировать транцевую плиту 6 на опорах-направляющих 20 и 21 после того как соответствующая секция транцевой плиты 6 движением снизу-вверх до упора будет надета на опоры-направляющие и пазы 22 окажутся перед отверстиями 24 в передней части плиты 6 (фиг. 6). Фиксаторы 23 крепятся на плите 6 с помощью болтов 25 и стопорных шайб 26. Для этого на плите предусмотрено резьбовое отверстие 27. Опоры-направляющие 20 и 21 отличаются количеством отверстий 28, через которые происходит их крепление к транцу 5. На опорах-направляющих 20 предусмотрено два таких отверстия 28, а на опорах-направляющих 21 - по одному отверстию 28. Опоры-направляющие 21 устанавливаются в тех местах задней кромки транца 5, где ограничения по высоте являются наиболее жесткими, например, под фланцами 13 опор 10. Для того чтобы головки крепежных болтов 29 и 30 не мешали установке транцевой плиты 6 на опоры-направляющие 20 и 21, в опорах предусмотрены соответствующие выемки 31 и 32. Количество опор-направляющих 20 и 21 для транцевой плиты 6 и пластин подвески 33 для интерцепторов 7 определяется материалом конструкции (нержавеющая сталь, титановые или алюминиевые сплавы) и шириной транца по его задней кромке. Кроме того, расстояния между опорами-направляющими согласуются с продольным силовым набором днища и транца. Поскольку у каждого интерцептора 7 рабочая поверхность выполнена по радиусу R с центром в т. И (фиг. 4), то при установке пластин подвески 33 с интерцептором 7 в щелях 17 легко обеспечивается необходимый минимальный зазор 0,5... 1 мм между задней кромкой ЖЖ транцевой плиты 6 и цилиндрической поверхностью интерцептора 7. Более того указанный зазор может быть легко сделан еще меньше (порядка 0,2...0,3 мм), так как транцевая плита, интерцепторы и детали их крепления имеют высокую точность изготовления (допуски порядка 0,05. . . 0,1 мм) и зазор уже не является предметом противоречия между требованием высокого гидравлического сопротивления (гарантирующего отсутствие заметного перетекания воды из зоны высокого давления под транцевой плитой при выдвиге интерцептора при ходе судна в зону атмосферного давления над транцевой плитой) и требованием исключения контакта между задней кромкой транцевой плиты и рабочей поверхностью интерцептора при любых его выдвигах в случае выполнения транца 5, с одной стороны, и опор-направляющих 20, 21 и транцевой плиты 6 с интерцепторами 7, с другой стороны, из разных материалов, при контакте которых возникает электрохимическая коррозия. В предлагаемой конструкции электроизоляция выполняется между неподвижными деталями, а в случае прототипа она должна была выполняться между неподвижными и подвижными деталями, что вызывало значительные трудности. Все пластины подвески 33 изготавливаются в пакете, что позволяет получить минимальный разброс их размеров. На каждой пластине закрепляется ось 34 с оседержателем 35. Далее оседержатель 35 крепится к передней части транцевой плиты 6 с помощью винтов 36 и гаек 37 (фиг. 4). Для крепления используются отверстия 38 (фиг. 5). При этом в плоскостях К (слева и справа от каждой щели 17) устанавливаются нервюры 39, которые спереди крепятся к транцевой плите 6 с помощью тех же винтов 36 и гаек 37 (т. е. совместно с оседержателями 35), а в районе задней кромки ЖЖ транцевой плиты - с помощью винтов 40 и гаек 41. На нервюрах 39 сверху предусмотрены резьбовые отверстия, оси которых также лежат в плоскости К и которые используются для крепления сверху на транцевой плите 6 крышек 42 с помощью болтов 43 и стопорных шайб 44. Эта операция выполняется после крепления и фиксации транцевой плиты 6 на опорах-направляющих 20 и 21 с помощью фиксаторов 23. Для крепления опор-направляющих 20, 21 внутри корпуса 2 судна 1 используются клиновые пластины 45, шайбы 46, резиновые кольца-уплотнители 47 и гайки 48. При необходимости обеспечения электроизоляции между опорами-направляющими 20, 21 и транцем 5 и между плитой 6 и транцем 5 устанавливаются электроизоляционные прокладки (например, из стеклотекстолита), как это показано на фиг. 4, а на болты 29, 30, пластины 45 и шайбы 46 наносится электроизоляционное покрытие, например, методом микродугового оксидирования. Для доступа к отверстиям 38 (фиг. 5) на передней части транцевой плиты 6 выполнены пазы 49. Сверху на плите 6 выполнены резьбовые отверстия 50 для дополнительного крепления крышек 42. Аналогичные отверстия 51 предусмотрены и на опорах-направляющих 20 и 21. Соединение пластин подвески 33 с интерцепторами 7 происходит с помощью шпонок 47 (верхняя) и 48 (нижняя), которые вставляются в соответствующие пазы на пластинах 33 и интерцепторах 7, и болтов 52 со стопорными пластинами 53. Вместо двух шпонок 47 в месте крепления тяг 54 в пазы на двух пластинах подвески 33 и интерцепторе 7 используется вилка-шпонка 55, которая фиксируется более длинными болтами 56. Соединение вилки-шпонки 55 с тягой 54 производится с помощью оси 57, втулок 58, корончатой гайки 59 и шплинта 60. Высота ЛМ интерцептора 7 (расстояние между точками Л и М на фиг. 4) и длина ЖН продольных щелей 17 (расстояние между точками Ж и Н на фиг. 5) на транцевой плите 6 выбираются из условия обеспечения заданного максимального выдвига интерцепторов δmax. Ширина щели 17 принимается равной толщине пластины подвески 33 плюс зазор 0,5 мм с каждой стороны.
Управление положением интерцепторов 7 обеспечивается системой управления, функциональная схема которой показана на фиг. 8. Здесь использованы следующие обозначения: 61 - блок задатчиков углового (крен, дифферент) положения судна; 62 - блок задатчиков статических выдвигов интерцепторов 7; 63 - блок параметров движения судна (углы крена и дифферента, их угловые скорости, перегрузки в ряде точек днища судна, скорость хода судна); 64 - вычислитель, формирующий законы управления для следящих электроприводов 65, 66, 67 и 68 соответствующих интерцепторов 7(ЛБ), 7(ЛК), 7(ПК) и 7(ПБ); 69 - усилитель мощности; 70 - датчик обратной связи (датчик положения интерцептора); 71 - кинематическая связь между приводами 72 и интерцепторами 7 (шток привода 72 - качалка 73 - тяга 54). На фиг. 3 поз.74 обозначен кабель, который обеспечивает электрическую связь между блоками 69 и 72, 70 и 69 (вход 1).
Быстроходное судно 1, оборудованное предлагаемой транцевой плитой 6 и комплексом управляемых интерцепторов 7, используют следующим образом.
При достижении быстроходным судном 1 относительной скорости  (определяется по результатам модельных испытаний судна на этапе разработки эскизного проекта судна), при которой интерцепторы 7 становятся эффективными и с их помощью можно создавать гидродинамические силы, позволяющие управлять угловым положением судна, включают систему управления интерцепторами. Затем с ее помощью либо вручную (с помощью блока 62 задатчиков статических выдвигов интерцепторов), либо автоматически (если в системе предусмотрено программное изменение выдвигов интерцепторов в зависимости от относительной скорости хода) устанавливают необходимые оптимальные статические выдвиги для кормовых интерцепторов, которые необходимы для заданной относительной скорости хода
(определяется по результатам модельных испытаний судна на этапе разработки эскизного проекта судна), при которой интерцепторы 7 становятся эффективными и с их помощью можно создавать гидродинамические силы, позволяющие управлять угловым положением судна, включают систему управления интерцепторами. Затем с ее помощью либо вручную (с помощью блока 62 задатчиков статических выдвигов интерцепторов), либо автоматически (если в системе предусмотрено программное изменение выдвигов интерцепторов в зависимости от относительной скорости хода) устанавливают необходимые оптимальные статические выдвиги для кормовых интерцепторов, которые необходимы для заданной относительной скорости хода  (под статическим выдвигом интерцепторов 7 понимается выдвиг, обеспечивающий минимальное сопротивление движению судна в условиях "тихой" воды, относительно этого выдвига интерцептор может выдвигаться дальше до 100% или убираться до 0% при парировании возмущений от волны, т.е. при использовании его в качестве успокоителя килевой и бортовой качки). В случае "ручной" установки статических выдвигов на входы 2 усилителей мощности 69, входящих в состав следящих приводов 65, 66, 67 и 68, от вычислителя 64 поступают постоянные сигналы, которые усиливаются и отрабатываются приводами 72. При этом с датчиков обратной связи 70 на входы 1 усилителей мощности 69 поступают сигналы, которые компенсируют сигналы на входах 2 от вычислителя 64. Каждый привод 72 (следовательно, и интерцептор 7) останавливается в том положении, когда сумма сигналов на входах усилителя мощности 69 становится равной 0. Т. е. следящие приводы 65, 66, 67 и 68 отслеживают сигналы, поступающие на каждый из них с вычислителя 64. Эти сигналы меняются не только при изменении скорости движения, но и при изменении углового положения судна, если движение происходит в условиях волнения. Информацию об изменении углового положения и скорости этого изменения в вычислитель 64 выдают блок параметров движения 63 судна и блок 61 задатчиков углового положения судна. Как только любой из следящих приводов начинает отрабатывать ненулевой сигнал с вычислителя 64, то сразу же приходит в движение шток соответствующего привода, и он через качалку 73 и тягу 54 приводит в движение соответствующий интерцептор 7.
(под статическим выдвигом интерцепторов 7 понимается выдвиг, обеспечивающий минимальное сопротивление движению судна в условиях "тихой" воды, относительно этого выдвига интерцептор может выдвигаться дальше до 100% или убираться до 0% при парировании возмущений от волны, т.е. при использовании его в качестве успокоителя килевой и бортовой качки). В случае "ручной" установки статических выдвигов на входы 2 усилителей мощности 69, входящих в состав следящих приводов 65, 66, 67 и 68, от вычислителя 64 поступают постоянные сигналы, которые усиливаются и отрабатываются приводами 72. При этом с датчиков обратной связи 70 на входы 1 усилителей мощности 69 поступают сигналы, которые компенсируют сигналы на входах 2 от вычислителя 64. Каждый привод 72 (следовательно, и интерцептор 7) останавливается в том положении, когда сумма сигналов на входах усилителя мощности 69 становится равной 0. Т. е. следящие приводы 65, 66, 67 и 68 отслеживают сигналы, поступающие на каждый из них с вычислителя 64. Эти сигналы меняются не только при изменении скорости движения, но и при изменении углового положения судна, если движение происходит в условиях волнения. Информацию об изменении углового положения и скорости этого изменения в вычислитель 64 выдают блок параметров движения 63 судна и блок 61 задатчиков углового положения судна. Как только любой из следящих приводов начинает отрабатывать ненулевой сигнал с вычислителя 64, то сразу же приходит в движение шток соответствующего привода, и он через качалку 73 и тягу 54 приводит в движение соответствующий интерцептор 7.
Результаты конструкторских проработок ряда быстроходных судов с предлагаемой транцевой плитой и управляемыми интерцепторами показывают, что предлагаемое техническое решение позволяет:
- примерно, в 4,5 раза уменьшить размеры (высоту и длину) транцевой плиты и в 2 раза уменьшить высоту интерцепторов;
- примерно в 7-9 раз уменьшить массу транцевой плиты и интерцепторов;
- выполнить изготовление и сборку транцевой плиты и интерцепторов полностью в условиях механического цеха без сварки и наладить их массовый выпуск;
- обеспечить минимальный зазор 0,2...1 мм между задней кромкой транцевой плиты и интерцептором, который гарантирует отсутствие заметного перетекания воды из зоны высокого давления под транцевой плитой (60% от скоростного напора) в зону атмосферного давления над плитой и повышает эффективность интерцепторов;
- упростить обеспечение необходимой электроизоляции между опорами-направляющими 20, 21, транцевой плитой 5 с интерцепторами 6, с одной стороны, и транцем 5, с другой стороны, в случае выполнения перечисленных деталей и транца из разных материалов, при контакте которых возникает электрохимическая коррозия;
- обеспечить (в случае необходимости) быстрый монтаж и демонтаж предлагаемой транцевой плиты 6 с интерцепторами 7 и следящими приводами 72;
- установить предлагаемую конструкцию транцевой плиты и интерцепторов на быстроходных судах, на которых в качестве движительно-рулевого комплекса использованы:
гребные винты, расположенные на наклонных валах под днищем судна перед транцем, и поворотные рули направления, установленные за ними;
или частично погруженные гребные винты, установленные на наклонных консольных валах на и за транцем судна и оборудованные приводами для изменения их положения в горизонтальной и вертикальной плоскостях;
или водометные движители, установленные на транце судна и оборудованные реверсивно-рулевыми устройствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОХОДНОЕ СУДНО | 1998 |
|
RU2136534C1 |
| БЫСТРОХОДНОЕ СУДНО | 2000 |
|
RU2163553C1 |
| БЫСТРОХОДНОЕ СУДНО | 2000 |
|
RU2163554C1 |
| ПЛАВУЧАЯ УСТАНОВКА ДЛЯ ПОЖАРОТУШЕНИЯ И СПОСОБ ЕЕ РАБОТЫ | 1998 |
|
RU2130794C1 |
| ЖИДКОСТНАЯ ФОРСУНКА | 1998 |
|
RU2137039C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ГАЗОКАПЕЛЬНОЙ СТРУИ И КЛАПАН ДЛЯ ПОДАЧИ ДВУХФАЗНОЙ РАБОЧЕЙ СРЕДЫ | 1998 |
|
RU2132752C1 |
| УСТАНОВКА ДЛЯ ПОЖАРОТУШЕНИЯ | 1997 |
|
RU2121390C1 |
| БЫСТРОХОДНОЕ СУДНО | 2007 |
|
RU2356776C1 |
| СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЯ (ВАРИАНТЫ) | 1995 |
|
RU2081202C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108260C1 |
Изобретение относится к судостроению и касается конструирования быстроходных судов, имеющих управляемые интерцепторы и движущихся в переходном режиме или режиме глиссирования. Судно содержит корпус с транцем и транцевой плитой. За ней установлены управляемые интерцепторы. Судно имеет движитель. Транцевая плита выполнена из съемных секций по числу интерцепторов. Каждая из них закреплена фиксаторами заподлицо с поверхностью днища судна на опорах-направляющих. Они установлены на нижней части транца. Ширина каждой секции плиты равна размаху соответствующего интерцептора. В каждой секции выполнены открытые со стороны задней кромки транцевой плиты щели по числу пластин подвески интерцептора. Щели перпендикулярны упомянутой кромке плиты. Каждый интерцептор шарнирно закреплен на транцевой плите пластинами подвески, установленными в щелях секции транцевой плиты, причем интерцептор может совершать угловое перемещение вниз и сохранять минимальный зазор между задней кромкой секции транцевой плиты и этим интерцептором. Опоры-направляющие с крепежными деталями и транцевая плита с интерцепторами могут иметь электроизоляцию относительно транца для предотвращения электрохимической коррозии. Движителем может быть частично погруженный винт, установленный снаружи на транце судна и имеющий привод для изменения его положения в горизонтальной и вертикальной плоскостях. Движитель может быть водометным, устанавливаться на транце судна и оборудоваться реверсивно-рулевым устройством. Технический результат состоит в повышении технологичности и уменьшении материалоемкости судна. 3 з.п. ф-лы, 8 ил.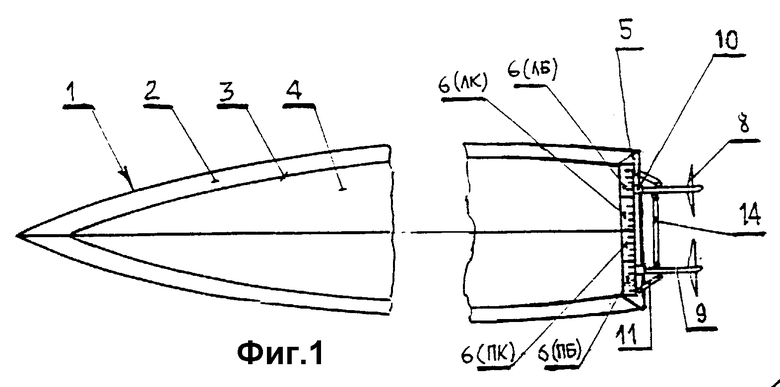
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| БЫСТРОХОДНОЕ СУДНО | 1988 |
|
SU1837522A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| КОРПУС СУДНА | 1988 |
|
SU1837520A1 |

