Изобретение относится к судостроению и касается конструированию быстроходных судов, оборудованных кормовыми или носовыми и кормовыми автоматически управляемыми интерцепторами и движущихся в переходном режиме или в режиме глиссирования.
Известно быстроходное судно, содержащее корпус с транцевой кормой и оборудованное кормовыми автоматически управляемыми интерцепторами [1].
Однако оно имеет неоптимальный ходовой дифферент и малоэффективно при умерении килевой и бортовой качки.
Технический результат от реализации описываемого изобретения заключается в достижении оптимального ходового дифферента судна и в повышении эффективности умерения килевой и бортовой качки.
Этот технический результат достигается тем, что у быстроходного судна, содержащего корпус с транцевой кормой и оборудованного кормовыми автоматически управляемыми интерцепторами, высота последних составляет 0,005-0,025 от ширины днища в месте их установки, а днище перед этим интерцепторами на длине судна, равной 5-15 высотам кормовых интерцепторов, плавно отогнуто от линии киля вверх на величину 0,35-0,55 от высоты кормовых интерцепторов.
Изобретение поясняется чертежами.
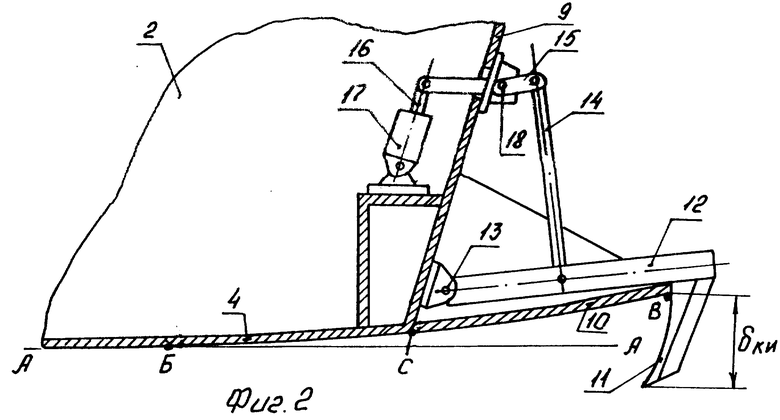
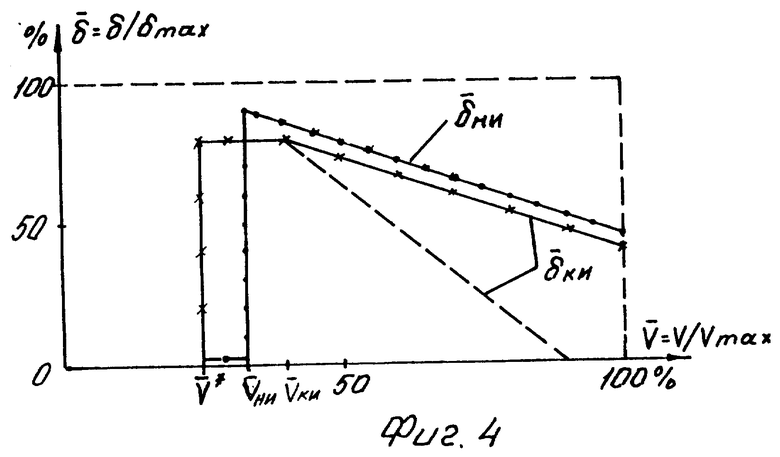
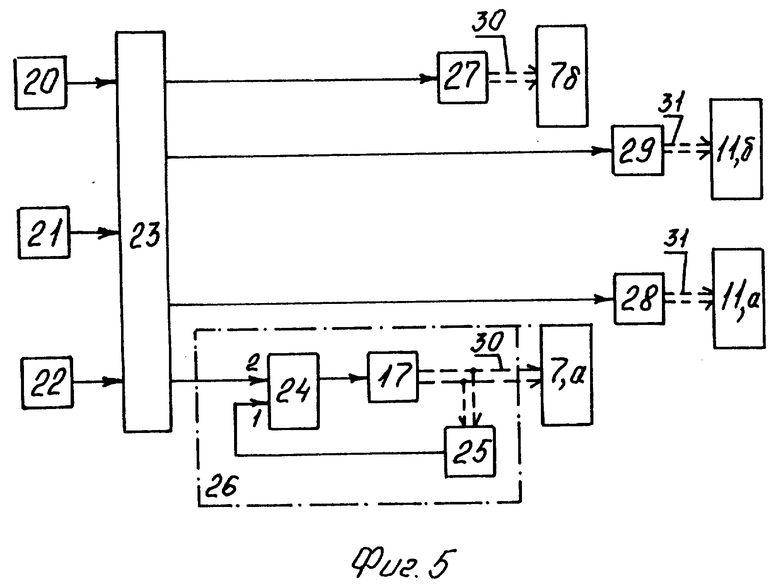
На фиг. 1 показано быстроходное судно, оборудованное носовыми, установленными за носовым реданом, и кормовыми, установленными за транцевой плитой, автоматически управляемыми интерцепторами, вид снизу; на фиг. 2 - продольный разрез кормовой части быстроходного судна с кормовыми интерцепторами и отогнутым днищем (на части корпуса и транцевой плиты); на фиг. 3 - то же, на части корпуса; на фиг. 4 - график относительyого выдвига носовых (δни= δни/δниmax) и кормовых (δки= δки/δкиmax) интерцепторов в зависимости от относительной скорости хода  судна; на фиг. 5 - блок-схема системы автоматического управления носовыми и кормовыми интерцепторами судна, показанного на фиг. 1.
судна; на фиг. 5 - блок-схема системы автоматического управления носовыми и кормовыми интерцепторами судна, показанного на фиг. 1.
Быстроходное судно 1 (фиг. 1) содержит корпус 2 с остроскулыми обводами 3 и килевым днищем 4. В носовой части днища расположен редан 5, а за ним на штангах 6 установлены носовые автоматически управляемые интерцепторы 7, разделенные на секции левого (7,а) и правого (7,б) борта и имеющие рабочую высоту, равную, например, 0,025 от ширины днища Bни по скуле 3. Рабочая высота интерцепторов, т. е. их максимальный выдвиг в поток по вертикали, определяется по результатам буксировочных испытаний модели судна в гидроканале. Она лежит в пределах 0,005-0,025 от ширины днища в месте установки интерцепторов. Конструктивная высота интерцепторов превышает рабочую высоту на 5-10%, чтобы исключить образование меду задней кромкой редана и рабочей поверхностью интерцептора щели, более 0,5-1,5 мм, через которую начнет интенсивно перетекать вода и резко снизит давление в потоке перед интерцептором.
Интерцепторы 7 выполнены с острой нижней кромкой (для обеспечения устойчивого срыва потока с этой кромки), установлены заподлицо с задней кромкой редана 5 (убранное положение) и имеют возможность выдвигаться из-за нее путем поворота штанг 6 относительно осей 8. Корпус 2 (фиг. 2) имеет транцевую корму (транец) 9 и транцевую плиту 10, из-за которой выдвигаются кормовые интерцепторы 11, установленные на штангах 12 на транце 9 и разделенные на секции левого (11,а) и правого (11,б) борта. Кормовые интерцепторы поворачиваются относительно осей 13 с помощью тяг 14, которые через двуплечую качалку 15 соединены со штоком 16 привода 17, установленного внутри корпуса 2. Чтобы исключить попадание воды внутрь корпуса 2 при поворотах качалки 15, на ее оси 18 установлены необходимые уплотнения-сальники. Количество штанг, на которых закреплены интерцепторы, и количество тяг, с помощью которых интерцепторы приводятся в движение, зависит от размаха интерцепторов.
На фиг. 1 каждый интерцептор имеет по две штанги, хотя возможна подвеска на 3-х и 4-х штангах. Если оси 13 штанг 12 кормовых интерцепторов 11 на фиг. 2 крепятся на транце 9, то в случае фиг. 3 - на транцах 19.
Плавный отгиб днища 4 от килевой линии АА вверх (от точки Б до точки В) показан на фиг. 2 и 3, где точка В - принадлежит задней кромке днища 4 (или транцевой плиты 10), из-за которой кормовой интерцептор 11 выдвигается в поток на величину δки . Точки Б и В также показаны на фиг. 1 в виде линий ББ и ВВ, линия СС - след транца 9 на днище 4, показывает размер транцевой плиты 10. Если за начало координат взять точку Б, а за ось абсцисс - килевую линию АА (углом наклона килевой линии АА к основной плоскости, содержащей ось абсцисс, пренебрегаем из-за его малости), то плавный отгиб днища на участке БВ можно получить, если воспользоваться, например, участком параболы вида y = ax2, где y = (0,35...0,55)δки, a x = (5...15)δки. .
На фиг. 5 цифрами обозначены: 20 - блок задатчиков статических выдвигов носовых 7 и кормовых 11 интерцепторов, 21 - блок задатчиков углового (крен и дифферент) положения судна, 22 - блок параметров движения судна (углы крена и дифферента, их угловые скорости, перегрузки в ряде точек днища судна, скорость V движения судна), 23 - вычислитель, формирующий законы управления для следящих приводов интерцепторов, 24 - усилитель мощности, 17 - исполнительный привод, 25 - датчик обратной связи, 26, 27, 28 и 29 - следящий привод соответствующего интерцептора. 30 и 31 - кинематическая связь между приводами 17 и носовыми и кормовыми интерцепторами соответственно, осуществляемая через штоки 16, двуплечие качалки 15 и тяги 14 и определяющая зависимость δи= f(lшт), , где δи - выдвиг интерцептора и lшт - ход штока привода.
Быстроходное судно 1, оборудованное описанным комплексом автоматически управляемых интерцепторов (носовых и кормовых или только кормовых) и имеющее отогнутое вверх от килевой линии днище перед кормовыми интерцепторами, используют следующим образом.
При достижении быстроходным судном скорости V* (определяется по результатам модельных испытаний еще на этапе разработки эскизного проекта судна, ей соответствует диапазон чисел Фруда 1,1-1,3), при которой интерцепторы становятся эффективными (т. е. , с их помощью можно создавать гидродинамические силы, позволяющие управлять угловым положением судна), включают систему управления и с ее помощью либо вручную (с помощью блока 20 задатчиков статических выдвигов интерцепторов), либо автоматически (если в системе предусмотрено программное изменение выдвигов интерцепторов 7 и 11 в зависимости от скорости V движения, как это показано на фиг. 4) устанавливают необходимые выдвиги носовых δни и кормовых δки интерцепторов. В процессе этой операции на входы 2 усилителей мощности 24, входящих в состав следящих приводов 26, 27, 28 и 29, от вычислителя 23 поступают постоянные сигналы, которые усиливаются и обрабатываются приводами 17. При этом с датчиков обратной связи 25 на входы 1 усилителей мощности поступают сигналы, которые компенсируют сигналы на входах 2 от вычислителя 23. Каждый привод 17 (следовательно и интерцептор 7 или 11) останавливается в том положении, когда сумма сигналов на входах усилителя мощности 24 становится равной 0. Т.е. следящие приводы 26, 27, 28 и 29 отслеживают сигналы, поступающие на каждый из них с вычислителя. Эти сигналы меняются не только при изменении скорости движения, но и при изменении углового положения судна, если движение происходит в условиях волнения. Информацию об изменении углового положения и скорости этого изменения в вычислитель 23 выдают блок 22 параметров движения судна и блок 21 задатчиков углового положения судна. Как только любой из следящих приводов начинает отрабатывать ненулевой сигнал с вычислителя 23, то сразу же приходит в движение шток 16 привода 17, и он через свою качалку и тягу приводит в движение свой интерцептор.
На фиг. 4 показано положение носовых и кормовых интерцепторов (через их относительный выдвиг  в зависимости от относительной скорости
в зависимости от относительной скорости  движения (хода) судна, при этом сплошной линией с крестиком показан статический выдвиг кормовых интерцепторов и сплошной линией с точками - статический выдвиг носовых интерцепторов после включения системы автоматического управления (фиг. 5) на скорости
движения (хода) судна, при этом сплошной линией с крестиком показан статический выдвиг кормовых интерцепторов и сплошной линией с точками - статический выдвиг носовых интерцепторов после включения системы автоматического управления (фиг. 5) на скорости  . При этом кормовые интерцепторы 11 сразу же программно выдвигаются на 75-80% своего максимального выдвига и затем, начиная со скорости
. При этом кормовые интерцепторы 11 сразу же программно выдвигаются на 75-80% своего максимального выдвига и затем, начиная со скорости  , убираются до величины 35...40%.
, убираются до величины 35...40%.
Аналогичным образом выдвигаются, а затем убираются и носовые интерцепторы 7. Уборка интерцепторов с ростом скорости движения судна объясняется квадративным увеличением их эффективности. Если в случае прототипа (пунктирная линия на фиг. 4) полная уборка кормовых интерцепторов должна быть выполнена уже на скорости 80-90% от максимальной скорости, то в случае предлагаемого решения статический выдвиг интерцепторов 11 остается равным 35-45% и выдвиг их до 100% и уборка их до 0% позволяет эффективно умерять в обе стороны бортовую и килевую качку вплоть до максимальной скорости. В случае прототипа дальнейшее увеличение скорости хода (после того как интерцепторы 11 статически полностью убраны) практически невозможно, так как резко растет сопротивление движению судна, поскольку кормовые интерцепторы уже не могут обеспечивать оптимальную посадку судна и умеряют качку только в одну сторону.
Результаты модельных и натурных испытаний ряда быстроходных судов показывают, что предлагаемое техническое решение позволяет на 5-10% увеличить скорость хода судна и обеспечивает эффективное умерение качки во всем диапазоне скоростей хода.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108259C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2096240C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108258C1 |
| БЫСТРОХОДНОЕ СУДНО | 2000 |
|
RU2163553C1 |
| БЫСТРОХОДНОЕ СУДНО | 1988 |
|
SU1837522A1 |
| БЫСТРОХОДНОЕ СУДНО | 1997 |
|
RU2127689C1 |
| БЫСТРОХОДНОЕ СУДНО | 2008 |
|
RU2386567C1 |
| БЫСТРОХОДНОЕ СУДНО | 2009 |
|
RU2396180C1 |
| БЫСТРОХОДНОЕ СУДНО | 2000 |
|
RU2163554C1 |
| БЫСТРОХОДНОЕ СУДНО | 2000 |
|
RU2199466C2 |

Использование: изобретение относится у судостроению и касается конструирования быстроходных судов, оборудованных кормовыми или носовыми и кормовыми автоматически управляемыми интерцепторами и движущихся в переходном режиме или режиме глиссирования. Сущность изобретения заключается в том, что у быстроходного судна, содержащего корпус с транцевой кормой и оборудованного кормовыми автоматически управляемыми интерцепторами, высота последних составляет 0,005 - 0,025 от ширины днища в месте их установки, а днище перед этими интерцепторами на длине судна, равной 5 - 15 высотам кормовых интерцепторов, плавно отогнуто от линии киля вверх на величину 0,35 - 0,55 от высоты кормовых интерцепторов. 5 ил.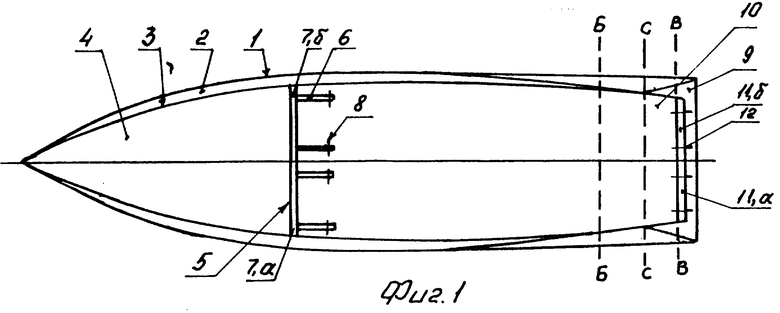
Быстроходное судно, содержащее корпус с транцевой кормой и оборудованное кормовыми автоматически управляемыми интерцепторами, отличающееся тем, что высота упомянутых интерцепторов составляет 0,005 - 0,025 ширины днища в месте их установки, а днище перед этими интерцепторами на длине судна, равной 5 - 15 высотам кормовых интерцепторов, плавно отогнуто от линии киля вверх на величину 0,35 - 0,55 высоты кормовых интерцепторов.
| SU, авторское свидетельство, 1837522, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |

