Изобретение относится к области судостроения, в частности, к конструированию быстроходных судов.
Цель изобретения повышение ходовых и мореходных качеств судна.
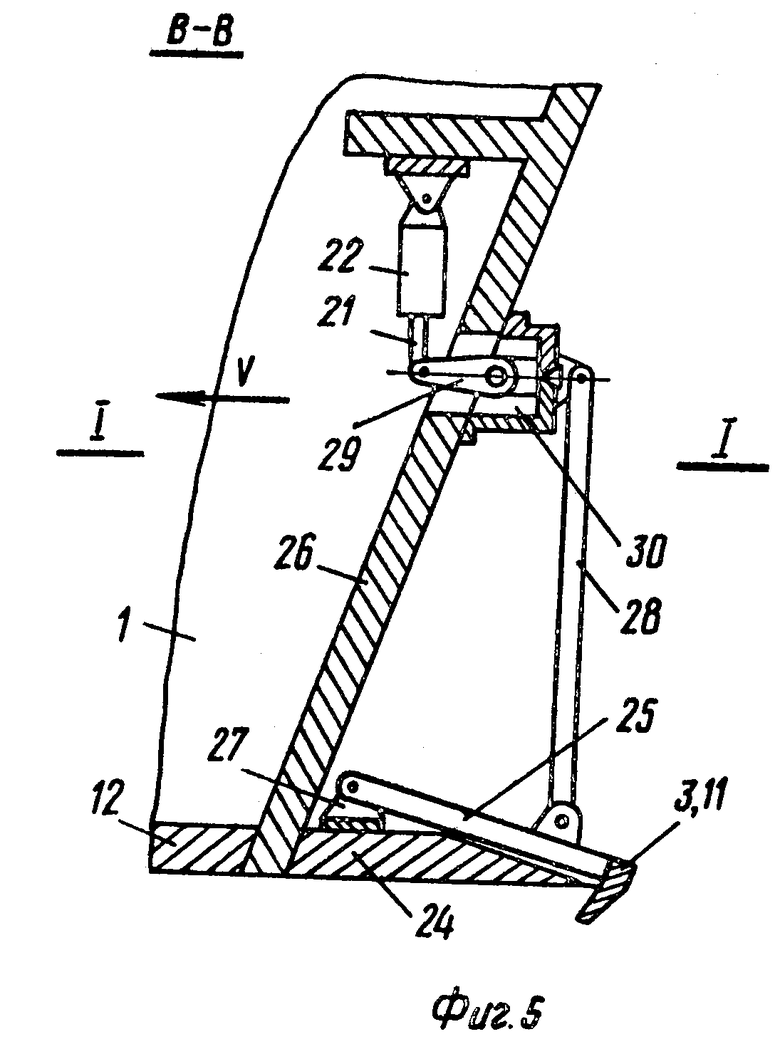
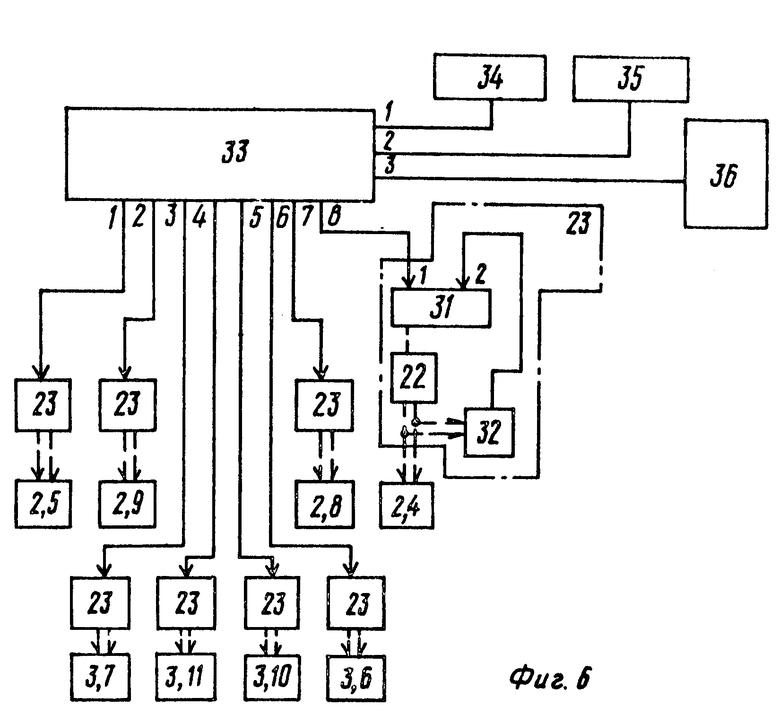
На фиг.1 на виде снизу показано расположение внешних и внутренних подсекций носовых и кормовых интерцепторов на днище быстроходного судна вариант 1, внутренние подсекции новых интерцепторов расположены перед внешними подсекциями; на фиг.2 то же, вариант 2, внешние подсекции носовых интерцепторов расположены перед внутренними подсекциями; на фиг.3 сечение по А-А на фиг.1, вариант конструктивного исполнения управляемых носовых интерцепторов, убираемых внутрь корпуса судна в ниши; на фиг.4 сечение по Б-Б на фиг.2, вариант управляемых носовых интерцепторов, расположенных снаружи корпуса судна и убираемых за накладные реданы; на фиг.5 сечение по В-В по фиг.1, вариант управляющих кормовых интерцепторов, расположенных на кормовом транце; на фиг. 6 вариант функциональной схемы систем автоматического управления движением, органами управления которой являются интерцепторы.
Быстроходное судно содержит корпус 1 и установленные побортно носовые 2 и кормовые 3 интерцепторы, состоящие соответственно из внешних 4, 5, 6, 7 и внутренних 8, 9, 10, 11 подсекций. В зависимости от состояния судна (построенное или проектируемое) и особенностей конструкции его днища 12 внешние 4, 5 и внутренние 8, 9 подсекции носовых интерцепторов 2 могут располагаться либо внутри корпуса 1 (днища 12) в нишах 13 (фиг.1,3), либо снаружи корпуса 1 за накладными реданами 14 (фиг.2,4). Если в первом случае (фиг. 3) интерцептор 2 для своего размещения требует искривления или ослабления продольного силового набора 15 днища 12 (за счет выреза под интерцептор), то во втором случае (фиг.4) этого нет, поскольку интерцептор 2 располагается снаружи корпуса 1, а его рычаги 16 подвески и тяги 17 (как и в первом случае) между продольными элементами силового набора 15. В обоих случаях герметизация днища 12 обеспечивается выгородкой 18, в плоскости разъема которой установлена ось (вал) 19 двуплечей качалки 20, одно плечо качалки 20 размещено внутри выгородки 18 и шарнирно соединено с тягой 17, которая шарнирно закреплена на рычагах 16 с интерцепторами 2. Второе плечо качалки 20 размещено вне выгородки 18 и шарнирно соединено со штоком 21 рулевого привода 22, который является исполнительным механизмом следящего привода 23 (фиг. 6).
На фиг. 1 внешние подсекции 4, 5 носовых интерцепторов 2 установлены за внутренними подсекциями 8, 9, а на фиг.2 наоборот. Расстояние между подсекциями 4, 5 и 8, 9 может меняться от 0 (подсекции установлены в одну линию) до 0,35 длины судна (т.к. установка носовых интерцепторов 2 целесообразна, как показал анализ проектов и результатов модельных испытаний, на расстоянии 0,4-0,75 длины судна от транца).
На фиг. 1 и 2 размах внешних подсекций 4 и 5 носовых интерцепторов 2 и внешних подсекций 6 и 7 кормовых интерцепторов 3 примерно равен размаху соответствующих внутренних подсекций. По результатам модельных и натурных испытаний выполнение каждого интерцептора в виде двух подсекций целесообразно (с точки зрения повышения их гидродинамической эффективности), если размах внешних подсекций равен не менее 0,5 размаха.
Интерцепторы 2 и 3 имеют заостренную нижнюю кромку (для обеспечения устойчивого срыва потока за ними), а также переднюю и заднюю поверхности, сопряженные с минимальным зазором (0,5-2 мм) с соответствующими поверхностями (кромками) ниши 13 (фиг.3), редана 14 (фиг.4) или транцевой плиты 24 (фиг. 2,5). Интерцепторы 3 могут быть установлены либо на транцевой плите 24 (фиг. 5) (ось вращения рычагов 25 расположена перед интерцепторами 3), либо непосредственно на транце 26 (на фигурах не показано, с помощью кронштейнов 27, устанавливаемых прямо на транце 26, ось вращения рычагов 25 выносится за интерцепторы 3). Как и в случае носовых интерцепторов 2, каждая подсекция кормовых интерцепторов 3 через тяги 28 и двуплечую качалку 29 подсоединена к штоку 21 своего рулевого привода 22, в качестве которого можно использовать, например, электрические рулевые машины РД-12, установленные на самолете ЯК-42/3. Качалку 29 с выгородкой 30 целесообразно устанавливать выше стояночной ватерлинии 1-1 (фиг.5).
Все следящие приводы 23 имеют одинаковую конструкцию и включают в себя последовательно соединенные усилитель 31 мощности и рулевой привод 22, а также датчик 32 обратной связи, который установлен на выходном валу привода 22 и выдает электрический сигнал, пропорциональной выдвигу соответствующего интерцептора, например, правой внешней подсекции 4 носового интерцептора 2 (фиг.6). Таким образом, на второй вход усилителя 31 мощности поступает сигнал δ4 пропорциональный действительному положению (выдвигу) внешних подсекций (интерцептора) 4, а на первый вход сигнал с восьмого выхода вычислителя 33, пропорциональный заданному выдвигу интерцептора 4 δ4зад. Усилитель 31 усиливает по мощности разностный сигнал Δ δ4=δ4зад-δ4 и приводит в действие привод 22, который перемещает интерцептор 4 и обнуляет сигнал Δ δ4, т.е. следит за сигналом δ4зад.
Для каждого следующего привода 23 сигнал δlзад(l 4-11, т.е. l соответствует номерам подсекций 4-11 интеpцептоpов 2,3) вырабатывается вычислителем 33, на входы которого поступают сигналы от блока 34 задатчиков выдвигов подсекций интерцепторов δоlзад блока 35 задатчиков углового положения судна и блока 36 параметров движения судна. В общем случае вычислитель 33 для каждого l-го следящего привода 23 вырабатывает управляющий сигнал, например, вида
δIзад= K +Kiv(v-vзад)+K
+Kiv(v-vзад)+K ·γ+KIγ(γ-γзад) (1) где l 4-11 (номера позиций интерцепторов на фиг.1, 2, 6);
·γ+KIγ(γ-γзад) (1) где l 4-11 (номера позиций интерцепторов на фиг.1, 2, 6);
v, vзад, v текущий угол дифферента судна, заданное значение угла дифферента, текущая угловая скорость дифферента;
γ, γзад, γ- текущий угол крена судна, заданное значение угла крена, тянущая угловая скорость крена;
Kiv, K , Kiγ, Kij коэффициенты передачи судна по соответствующей переменной (v, v, γ,γ), связанные с выдвигом l-го интерцептора. Следует отметить одну из особенностей судна с комплексом автоматически управляемых интерцепторов. Это то, что заданное угловое положение судна (vзад, γзад) можно получить путем подачи в вычислитель 33 соответствующих постоянных сигналов с блока 34 задатчиков выдвигов подсекций интерцепторов δоlзади/или соответствующих постоянных сигналов с блока 35 задатчиков углового положения судна.
, Kiγ, Kij коэффициенты передачи судна по соответствующей переменной (v, v, γ,γ), связанные с выдвигом l-го интерцептора. Следует отметить одну из особенностей судна с комплексом автоматически управляемых интерцепторов. Это то, что заданное угловое положение судна (vзад, γзад) можно получить путем подачи в вычислитель 33 соответствующих постоянных сигналов с блока 34 задатчиков выдвигов подсекций интерцепторов δоlзади/или соответствующих постоянных сигналов с блока 35 задатчиков углового положения судна.
При установке внешних 4,5 и внутренних 8, 9 подсекций носовых интерцепторов 2 со сдвигом друг относительно друга возникает вопрос о вентиляции каверны, которая должна появиться за внутренними подсекциями 8, 9. При расположении внешних подсекций 4, 5 впереди внутренних подсекций 8, 9 (фиг. 2) воздух в каверну за подсекциями 8, 9 поступает естественным образом из каверны за внешними подсекциями 4, 5, которая, в свою очередь, заполняется атмосферным воздухом со стороны борта. При обратном расположении подсекций (фиг. 1) необходимо предусматривать искусственную вентиляцию каверны за внутренними подсекциями 8, 9. На фиг.3 и 4 это сделано путем соединения внутренней полости выгородки 18 через воздуховод 37 либо с атмосферой либо с нагнетателем воздуха. Щель за подсекциями 8, 9 (фиг.5) должна быть увеличена и по площади равняться площади, через которую воздух поступает из атмосферы в воздуховод 37.
Если внутренние подсекции 8, 9 носовых интерцепторов 2 располагаются за накладными реданами 14 и в месте их установки днище 12 имеет килеватость, близкую к нулю, то возможно объединение внутренних подсекций в одну центральную подсекцию с целью сокращения числа автономно управляемых интерцепторов. Аналогичное объединение подсекций 10, 11 кормовых интерцепторов в одну центральную секцию также возможно, если килеватость транца 25 или транцевой плиты 24 близка к нулю (не более 2о).
В соответствии с выбранной гидродинамической компоновкой и конструктивными особенностями судна (удлинение, центровка, загрузка, углы килеватости и т.д.) выбирают соотношения между размахами внутренних и внешних подсекций из условия, что размах внешних подсекций должен быть не менее 0,5 размаха соответствующих внутренних подсекций), устанавливают места по длине судна, где должны располагаться внешние и внутренние подсекции носовых интерцепторов 2 и определяют гидродинамическую эффективность каждой подсекции носовых 2 и кормовых 3 интерцепторов. Поскольку эффективность каждой подсекции интерцепторов 2, 3 по углам дифферента и крена различна, то соответствующие подсекции располагают на максимальном удалении от центра масс судна (исходя из конструктивных особенностей судна). Далее соответственно их эффективности (т.е. возможности изменения с их помощью углового положения судна) устанавливают в САУД (в вычислителе 33) необходимые коэффициенты передачи.
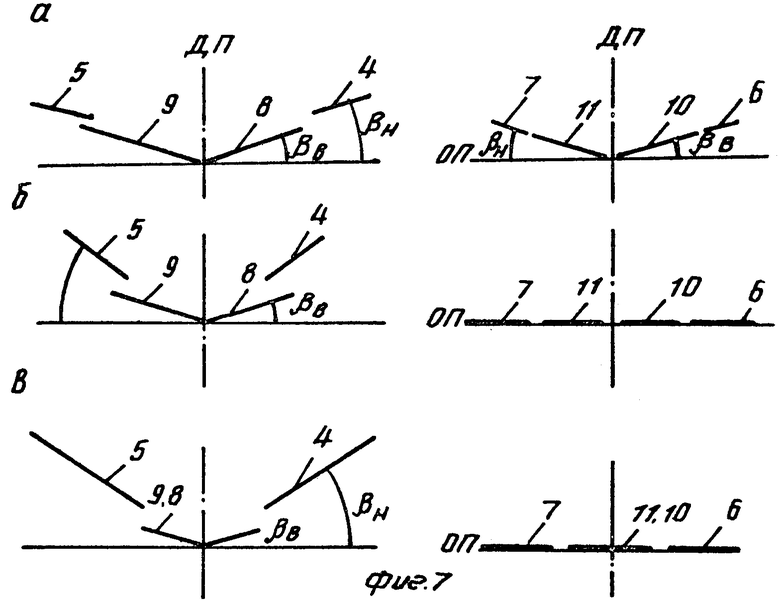
На фиг.7 схематично представлены различные варианты расположения носовых и кормовых интерцепторов. Здесь β угол килеватости судна.
В проекте а) носовые интерцепторы расположены в нишах в районе 6 теоретического шпангоута, при этом их внутренние секции расположены перед шпангоутом, а наружные секции за ним (βв>βн). Соотношение размахов наружных носовых секций интерцепторов к внутренним и наружных кормовых секций к внутренним кормовым 1:2 выбрано из условий выполнения требований по килевой и бортовой качки на заданном волнении и с учетом расположения оборудования внутри корпуса судна. Уменьшение размаха внешних секций интерцепторов приведет к резкому снижению эффективности умерения бортовой качки, поскольку подъемная сила, возникающая на интерцепторе, пропорциональна кубу его ширины.
В проекте б) носовые интерцепторы расположены за реданами, а кормовые интерцепторы почти на плоском транце. При этом внутренние секции носовых интерцепторов расположены за наружными секциями (βв>βн) и установлены с перекрытием. Соотношение размахов внутренних и наружных секций выбрано также из условий мореходности и составляет 1:1.
В проекте в) секции носовых наружных интерцепторов установлены за реданами и впереди внутренних секций (βв>βн), которые объединены по конструктивным соображениям в одну секцию. Аналогично в виде трех секций выполнены и кормовые интерцепторы. При этом секции носовых интерцепторов вынесены максимально вперед (установлены на расстоянии 0,75 длины судна от транца) и в зависимости от центровки судна и скорости движения могут частично выходить из воды.
Необходимо отметить, что установка носовых интерцепторов на расстоянии менее 0,4 и более 0,75 длины судна от транца нецелесообразна, так как анализ конструкций корпусов судов, движущихся со значительными скоростями (F2 > 1) показывает, что интерцепторы, установленные носовые 0,7-0,75 длины судна от транца, будут при движении выходить из воды и их эффективность будет близка к нулю. При размещении носового интерцептора близко к транцу (менее 0,4 L) его эффективность резко падает из-за уменьшения восстанавливающего момента и взаимного влияния интерцепторов.
Предлагаемое быстроходное судно используют следующим образом. При движении судна в условиях волнения на следящие привода 23 внешних подсекций 4-7 интерцепторов 2, 3 от вычислителя 33 поступают управляющие сигналы вида (1), в которых преобладают составляющие, связанные с углом и угловой скоростью крена, а на следящие привода 23 внутренних подсекций 8-11 интерцепторов 2, 3 сигналы, в которых преобладают составляющие, связанные с угловой скоростью дифферента. Под действием этих сигналов следящие привода 23 всех интерцепторов 2, 3 выдвигаются на требуемую величину и парируют возмущения, действующие на судно. При этом по сравнению с прототипом степень умерения бортовой и килевой качки повышается, поскольку оптимальным образом используются возможности интерцептора 2, 3 благодаря оптимальному расположению их подсекций по длине судна (внутренние подсекции) и максимальному удалению от диаметральной плоскости судна (внешние подсекции). Если управляющие сигналы, например, на следящие привода 23 внешних подсекций 4-7 не выходят на ограничение, а следящие приводы 23 внутренних подсекций 8-11 находятся в насыщении, то вычислитель 33 увеличивает коэффициенты передачи по сигналам угла и угловой скорости дифферента и выводит сигналы на выходах на максимальный уровень, т. е. для парирования возмущений по дифференту подключаются и внешние подсекции 4-7, и наоборот.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2096240C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108259C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108258C1 |
| БЫСТРОХОДНОЕ СУДНО | 2009 |
|
RU2396180C1 |
| БЫСТРОХОДНОЕ СУДНО | 2008 |
|
RU2386567C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108260C1 |
| БЫСТРОХОДНОЕ СУДНО | 2007 |
|
RU2355592C1 |
| БЫСТРОХОДНОЕ СУДНО | 2007 |
|
RU2369516C2 |
| БЫСТРОХОДНОЕ СУДНО | 1997 |
|
RU2127689C1 |
| ГЛИССИРУЮЩЕЕ СУДНО | 2002 |
|
RU2212352C1 |
Изобретение относится к судостроению и может быть применено на судах народного потребления, движущихся в переходном режиме или режиме глиссирования. Цель изобретения повышение ходовых и мореходных качеств судна. Поставленная цель достигается тем, что на быстроходном судне, оборудованном автоматически управляемыми носовыми и кормовым интерцепторами, разделенными на секции левого и правого борта и установленными в районе центра тяжести и на транце судна на всю его ширину, каждая секция выполнена в виде по крайней мере двух подсекций, при этом размах внешних подсекций может быть равен не менее 0,5 размаха внутренних подсекций, а подсекции носовых интерцепторов могут быть установлены на расстоянии 0,4 0,75 длины судна от транца и со сдвигом одна относительно другой. Кроме того, внутренние подсекции носового и/или кормового интерцепторов могут быть объединены в одну подсекцию. 1 з. п. ф-лы, 7 ил.
| Быстроходное судно | 1977 |
|
SU683947A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
