Изобретение относится к судостроению, более конкретно оно касается конструирования быстроходных судов, оборудованных управляемыми интерцепторами и предназначенных для движения в переходном режиме и в режиме глиссирования.
В настоящее время быстроходные суда с системой управляемых интерцепторов находят все большее применение в судостроении. Так, например, из патента РФ 2108260 (B 63 B 1/20, опубл. 10.04.98) известно быстроходное судно, содержащее корпус с транцевой кормой и оборудованное кормовыми автоматически управляемыми интерцепторами. Такие интерцепторы выдвигаются из-за кормового среза днища. При этом днище судна перед интерцепторами плавно отогнуто от линии киля вверх. На каждый интерцептор приходится от двух до четырех опор.
Особенность конструкции такого судна заключается в том, что при установке интерцепторов за транцевой плитой их опоры должны крепиться на транце с использованием клиновидных прокладок и болтовых соединений. Процесс индивидуальной подгонки клиновидных прокладок для каждой опоры требует много времени и высокой квалификации монтажников. Эти прокладки устанавливаются для обеспечения параллельности между осью вращения каждого интерцептора и нижней кромкой транцевой плиты. Выполнение этого условия в свою очередь необходимо для обеспечения минимального зазора между рабочей поверхностью интерцептора и указанной кромкой. Кроме того, каждое болтовое соединение, проходящее через корпус судна, должно обеспечивать герметичность и электроизоляцию соединяемых деталей для исключения электрохимической коррозии.
Наиболее близким аналогом изобретения из числа известных судов является быстроходное судно, описанное в патенте РФ 2108259 (B 63 B 1/20, опубл. 10.04.98), которое выбрано в качестве прототипа. Известное судно содержит корпус с транцевой кормой и оборудовано автоматически управляемыми интерцепторами, выдвигаемыми из-за кормового среза днища. При этом кормовой срез днища корпуса выполнен в виде редана, высота которого не менее высоты интерцепторов. Редан сдвинут вперед от транца на величину, равную 5-15 высотам интерцептора.
Крепление опор кормовых интерцепторов производится на днище корпуса в кормовом подрезе, т.е. на открытом и доступном месте. Однако технология изготовления такого судна по-прежнему включает трудоемкие операции индивидуальной подгонки клиновидных прокладок, проверки на герметичность корпуса судна. Для такой конструкции необходима также электроизоляция болтовых соединений, с помощью которых осуществляется крепление опор интерцепторов на днище.
Патентуемое изобретение направлено на упрощение технологии изготовления судна и регулировки интерцепторов при монтаже, на повышение надежности корпуса судна, оборудованного комплексом управляемых интерцепторов.
Конкретными задачами, на решение которых направлено изобретение, являются также снижение трудоемкости установки и электроизоляции носовых и кормовых интерцепторов на днище корпуса. Задачей изобретения является также исключение сверления корпуса судна и проверки герметичности болтового соединения, проходящего через отверстие в корпусе. Изобретение направлено на исключение технологических ограничений на место установки опор интерцепторов и на упрощение процесса регулировки зазора между нижней кромкой редана и рабочей цилиндрической поверхностью интерцептора.
Указанные технические результаты обеспечиваются тем, что быстроходное судно содержит корпус со скулообразными обводами и килевым днищем с носовыми и/или кормовыми реданами, за которыми расположены управляемые интерцепторы, последние выполнены с возможностью выдвижения из-за среза днища и установлены с возможностью поворота с помощью штанг относительно опор, закрепленных на днище корпуса в зареданном пространстве, при этом согласно настоящему изобретению опоры интерцепторов закреплены на днище с помощью башмаков. Одна опорная часть каждого такого башмака соединена посредством сварки с днищем, а другая выполнена с опорной поверхностью, параллельной кромке соответствующего редана и перпендикулярной диаметральной плоскости корпуса. Опоры интерцепторов закреплены с помощью разъемных соединений на указанных опорных поверхностях башмаков.
Такое выполнение элементов крепления интерцепторов не требует сверления днища корпуса судна для болтового крепления опор, а также позволяет исключить нагрузки, действующие на изгиб опор интерцепторов.
Для исключения электрохимической коррозии, в случае выполнения башмаков и опор из различных металлов или сплавов, опоры интерцепторов электроизолируются от башмаков.
Рабочая поверхность интерцепторов предпочтительно выполняется в форме выпуклой цилиндрической поверхности.
Патентуемое изобретение поясняется примером конкретного выполнения и прилагаемыми чертежами, на которых изображено:
на фиг. 1 - схематичный вид днища корпуса судна, на котором установлены интерцепторы;
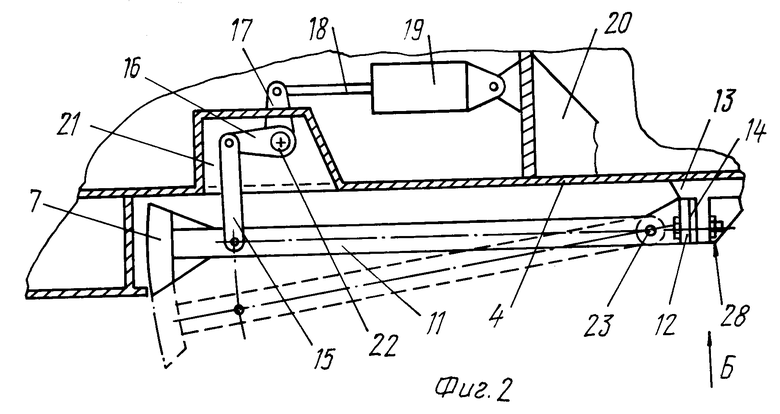
на фиг. 2 - продольный разрез корпуса судна в области носового редана (по плоскости А-А на фиг. 1);
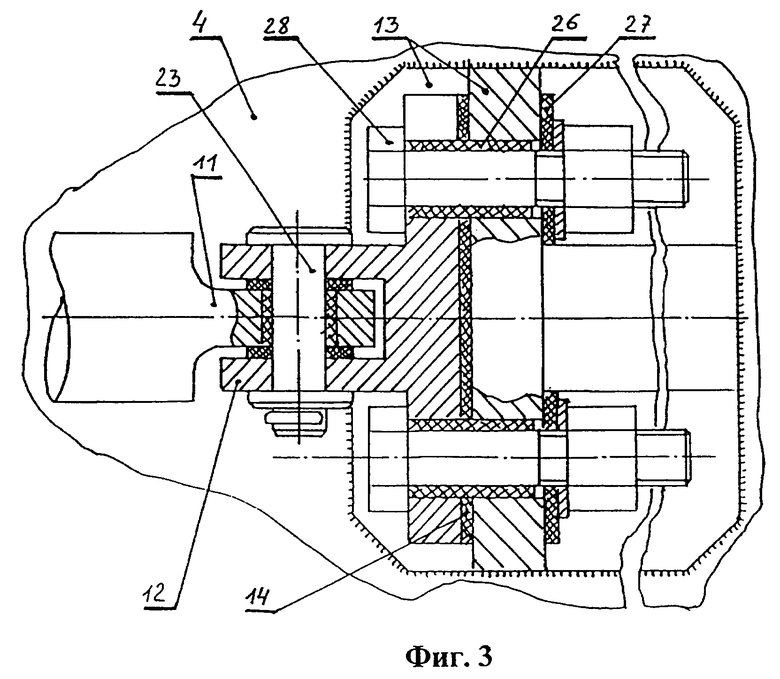
на фиг. 3 - вид Б на узел крепления опоры интерцептора (изображенный на фиг. 2) на башмаке с местными разрезами;
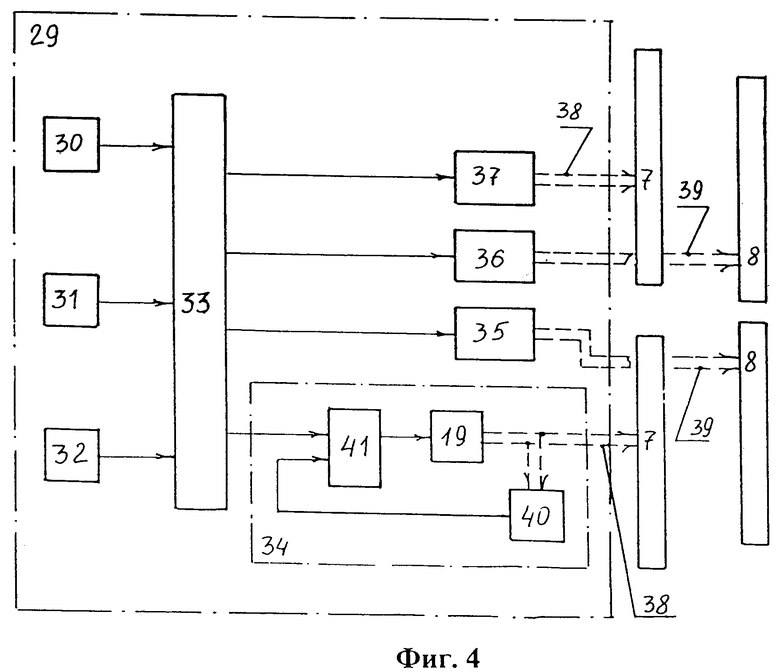
на фиг. 4 - блок-схема системы автоматического управления интерцепторами.
Быстроходное судно (см. фиг. 1-3) содержит корпус 1 с килевым днищем, разделенным носовым реданом 2 на две части - носовую 3 и кормовую 4. В кормовой части днища выполнен кормовой подрез 5 с образованием кормового редана 6. За реданами 2 и 6 заподлицо с соответствующей частью днища (носовой 3 или кормовой 4) побортно и симметрично относительно диаметральной плоскости (ДП) корпуса судна установлены носовые 7 и кормовые 8 управляемые интерцепторы. Перед кормовыми интерцепторами 8 размещены гребные винты 9 и рули управления 10. Носовые интерцепторы 7 с помощью штанг 11 и опор 12 шарнирно закреплены на башмаках 13, которые приварены к кормовой части днища 4.
Опорная поверхность башмаков 13, обращенная к опоре 12 интерцептора, перпендикулярна диаметральной плоскости судна (ДП) и параллельна нижней кромке носового редана 2. Между опорами 12 и башмаками 13 размещены регулировочные электроизоляционные прокладки 14. Штанга 11 интерцептора 7 через серьгу 15 и рычаги 16 и 17 шарнирно соединена со штоком 18 исполнительного механизма 19, который закреплен на фундаменте 20 внутри корпуса 1 судна. В днище 4 в области серьги 15 выполнена полость 21, через стенки которой проходит ось 22. На оси 22 жестко закреплены наружный рычаг 16 (внутри полости 21) и внутренний рычаг 17 (внутри корпуса 1). Указанные рычаги вместе образуют качалку (поз. 16, 22, 17), которая преобразует движение штока 18 в перемещение интерцептора 7. В результате работы привода интерцептор 7 выдвигается в поток из-за кромки редана 2 при повороте относительно осей 23 на заданную величину. Количество штанг 11 и осей 23 зависит от размаха интерцептора 7 и лежит в пределах от 2 до 4. Интерцепторы 7, изображенные на фиг. 2, подвешены на трех штангах.
Обычно принимается, что величина максимального выдвига интерцепторов в поток составляет от 0,015 до 0,025 ширины судна в месте установки интерцепторов. Для носовых интерцепторов 7 такой размер определяется от одной бортовой скулы 24 до противоположной скулы, а для кормовых интерцепторов 8 - от скулы 25 до противоположной скулы. Если интерцепторы и днище судна изготовлены из различных материалов, между которыми в паре возникает электрохимическая коррозия, то интерцепторы электроизолируют от корпуса с помощью прокладок 14 под опорами 12 (см. фиг. 2) и втулок 26 и шайб 27 в болтовых соединениях (см. фиг. 3). Аналогичная электроизоляция предусматривается и в месте крепления серьги 15 на штанге 11.
На фиг. 4 изображена блок-схема системы 29 управления интерцепторами, которая включает в свой состав следующие элементы:
- блок 30 задатчиков углового положения судна;
- блок 31 задатчиков статических положений интерцепторов 7 и 8;
- блок 32 датчиков, с которых поступает информация об углах и угловых скоростях дифферента и крена судна, его скорости хода, перегрузках в днище;
- блок 33, формирующий законы управления для следящих приводов 34, 35, 36 и 37, кинематически связанных с соответствующими интерцепторами.
Кинематические связи 38 и 39 между исполнительными механизмами 19 и соответствующими интерцепторами 7 и 8 обеспечиваются с помощью качалок (поз. 17, 22, 16) и серьги 15. В состав каждого следящего привода 34, 35, 36, 37 входит исполнительный механизм 19, датчик 40 обратной связи и усилитель мощности 41 (см. фиг. 4).
Монтаж интерцепторов осуществляется следующим образом.
Носовые 7 и кормовые 8 интерцепторы устанавливают на днище судна в соответствующих зареданных пространствах после выравнивания реданной кромки и приварки к днищу башмаков 13. Перед приваркой башмаков 13 их предварительно выравнивают в плоскости установки. При этом контролируют вертикальность опорной плоскости башмаков 13 под опоры интерцепторов и плотность прилегания поверхности башмаков к днищу. После этого на всех штангах 11 интерцептора устанавливают с помощью общей технологической оси опоры 12 и крепят их на башмаках 13. При установке опор одновременно обеспечивают регулировку зазора между рабочей поверхностью интерцептора и нижней кромкой редана. Перед разметкой отверстий в башмаках 13 под болты 28 и электроизоляционные втулки 26 опоры и башмаки стягивают с помощью струбцин и устанавливают технологические штифты (на чертеже не показаны). После этого рассверливают отверстия под болты 28 и втулки 26 и производят крепление опор на башмаках. Затем последовательно заменяют общую технологическую ось на рабочие оси 23 и соединяют среднюю штангу интерцептора с серьгой 15.
Работа системы носовых и/или бортовых интерцепторов, опоры 12 которых закреплены на башмаках 13, осуществляется следующим образом при движении судна.
При увеличении скорости хода судна, движение которого осуществляется с помощью гребных винтов 9 и рулей управления 10, оно последовательно проходит режим плавания, переходной режим и выходит на режим глиссирования.
При достижении судном скорости, при которой эффективно использование интерцепторов для управления угловым положением судна, включают автоматическую систему 29 управления интерцепторами (см. фиг. 4). С помощью системы 29 управления устанавливаются необходимые статические положения для интерцепторов, которые обеспечивают судну максимальное гидродинамическое качество. Установка положения интерцепторов может производиться либо вручную - с помощью блока 29, либо в автоматическом режиме - при возможности программирования положения интерцепторов в зависимости от скорости хода. При этом задаются оптимальные статические положения интерцепторов 7, при которых обеспечивается максимальное гидродинамическое качество судна. Относительно выбранных положений интерцепторы далее могут выдвигаться в поток до максимальной величины или полностью убираться за обводы днища. При парировании возмущений от волны и ветра интерцепторы убираются за кромку редана и работают как успокоители килевой и бортовой качки.
В случае ручной установки положения интерцепторов с помощью блока 31 задатчиков статического положения интерцепторов на первые входы усилителя мощности 41, входящих в состав следящих приводов 34, 35, 36, 37, от вычислителя 33 поступают постоянные сигналы. Эти сигналы усиливаются и отрабатываются исполнительными механизмами 19. При этом с датчиков обратной связи 40 на вторые входы усилителя мощности 41 поступают сигналы, которые компенсируют сигналы на первых входах. Каждый исполнительный механизм 19 и соответствующие интерцепторы 6 или 22 перемещаются до того положения, когда сумма сигналов на входах усилителя мощности 41 становится равной нулю. Следящие приводы 34, 35, 36, 37 отслеживают сигналы, поступающие на каждый из них с вычислителя 33. Эти сигналы изменяются не только при изменении скорости хода судна, но и при изменении его углового положения. Информация об изменении углового положения судна и скорости этого изменения поступает в вычислитель 33 с выходов блока 30 задатчиков углового положения судна и блока 32 датчиков, определяющих углы и угловые скорости дифферента и крена судна.
В результате проведенных испытаний было установлено, что установка интерцепторов на днище быстроходных судов с помощью опор, закрепленных на башмаках, приваренных к корпусу судна, позволяет:
- в 2-3 раза сократить время регулировки зазора между нижней кромкой редана и рабочей цилиндрической поверхностью интерцептора при их монтаже на корпусе судна (величина такого зазора обычно составляет от 0,5 до 1 мм);
- исключить при монтаже интерцепторов операцию проверки корпуса судна на герметичность;
- исключить ограничения на место установки опор интерцепторов на днище корпуса судна (ранее место установки опор с помощью болтового соединения определялось размещением силовой конструкции днища корпуса);
- повысить надежность крепления опор интерцепторов, поскольку детали крепления интерцепторов работают на сжатие, а не на изгиб.
Изобретение может найти широкое применение в судостроении, при разработке конструкции быстроходных судов, оборудованных комплексом управляемых интерцепторов. Такие суда обычно имеют возможность движения на переходном режиме и на режиме глиссирования, на которых наиболее эффективно применение интерцепторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОХОДНОЕ СУДНО | 2000 |
|
RU2163554C1 |
| БЫСТРОХОДНОЕ СУДНО | 1998 |
|
RU2136534C1 |
| БЫСТРОХОДНОЕ СУДНО | 1997 |
|
RU2127689C1 |
| БЫСТРОХОДНОЕ СУДНО | 2008 |
|
RU2386567C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108258C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2096240C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108259C1 |
| ПЛАВУЧАЯ УСТАНОВКА ДЛЯ ПОЖАРОТУШЕНИЯ И СПОСОБ ЕЕ РАБОТЫ | 1998 |
|
RU2130794C1 |
| МЕЛКОДИСПЕРСНЫЙ РАСПЫЛИТЕЛЬ ЖИДКОСТИ | 1999 |
|
RU2150336C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108260C1 |
Изобретение относится к судостроению и касается создания быстроходных судов, предназначенных для движения в переходном режиме и в режиме глиссирования. Быстроходное судно содержит корпус со скулообразными обводами и килевым днищем с носовыми и/или кормовыми реданами. За реданами установлены управляемые интерцепторы. Интерцепторы выполнены с возможностью выдвижения из-за среза днища и с возможностью поворота с помощью штанг относительно опор. Опоры закреплены на днище корпуса в зареданном пространстве с помощью башмаков. Одна опорная часть каждого из башмаков соединена посредством сварки с днищем, другая опорная часть выполнена с опорной поверхностью. Опорная поверхность параллельна кромке соответствующего редана и перпендикулярна диаметральной плоскости корпуса. Опоры интерцепторов закреплены с помощью разъемных соединений на упомянутых опорных поверхностях башмаков. Опоры интерцепторов могут быть электроизолированы от башмаков. Рабочую поверхность интерцепторов целесообразно выполнять цилиндрической и выпуклой. Технический результат - упрощение технологии постройки судна, упрощение регулирования интерцепторов при монтаже и повышение надежности корпуса судна, оборудованного комплексом управляемых интерцепторов. 2 з.п. ф-лы, 4 ил.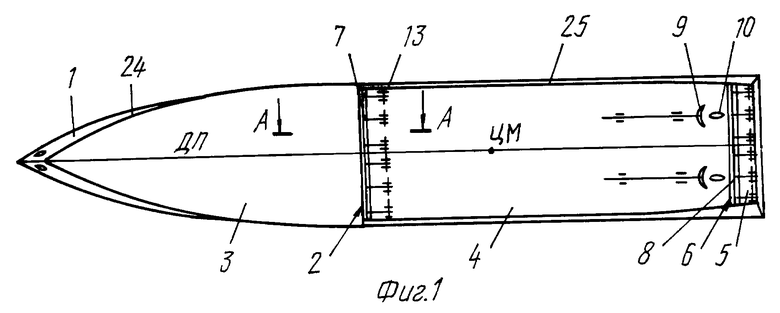
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108259C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108260C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2096240C1 |

