Изобретение относится к устройствам уменьшения размеров загрязненной поверхности в открытых водоемах с последующей возможностью очистки этой поверхности.
Известно достаточно много способов локализации пятна загрязненной поверхности. Например, описанные в книге Д. Кормак, Борьба с загрязнениями моря нефтью и химическими веществами. -М.:Транспорт, 1989, с. 74-75, с. 203- 205. Большинство из них связано с созданием механической преграды пятну загрязнения, для предотвращения сноса и растекания пятна из-за ветра и волнения. Чаще всего это различные варианты боновых заграждений. Такие заграждения, наряду с их несомненными достоинствами, не лишены и недостатков. Они достаточно громоздки, их непросто устанавливать и эффективность их работы зависит от волнения.
Известен способ создания восходящими к поверхности потоками пузырьков воздуха преграды, обеспечивающей последующий сбор и уничтожение пятна загрязнения (заявка Великобритании N 2246981, 19.02.92). Наиболее близким аналогом по технической сущности является устройство по заявке Великобритании N 2246981, 19.02.92. Данное устройство включает перфорированную гибкую трубу, соединенную с источником рабочего тела и прикрепленную к плавучим элементам гибкими связями.
Известная конструкция не позволяет активно воздействовать на пятно загрязнения, например путем его перемещения по поверхности воды.
Техническим результатом изобретения является возможность перемещения конструкции в процессе эксплуатации, что позволяет активно воздействовать на пятно загрязнения.
Устройство локализации плавающего на водной поверхности пятна загрязнения выполнено в виде перфорированной гибкой трубы, соединенной с источником рабочего тела и прикрепленной к плавучим элементам гибкими связями.
Плавучие элементы выполнены в виде дистанционно управляемых буксировщиков, труба прикреплена к балластным элементам, а заглубление трубы зафиксировано гибкими связями между балластными и плавучими элементами.
В частном случае рабочим телом является газ. Кроме того, гибкая труба выполнена замкнутой. Помимо этого гибкие связи выполнены в виде тросовых элементов и прикреплены с одной стороны к балластным элементам, с другой стороны - к плавучим элементам.
Устройство содержит гибкую перфорированную трубу, которая может принимать необходимую форму. Внутрь трубы подается рабочее тело, которое может быть жидкостью или газом. Балластные элементы заглубляют трубу, а плавучие элементы за счет выбора длины гибких связей поддерживают трубу на нужном заглублении, в частности, чтобы не мешать проходу судов - сборщиков загрязнений. Выполнение плавучих элементов в виде дистанционно управляемых буксировщиков позволяет активно воздействовать на устройство локализации пятна загрязнения, изменяя форму пятна или буксируя его вместе с преградой в необходимом направлении.
На фиг. 1 приведена схема действия устройства;
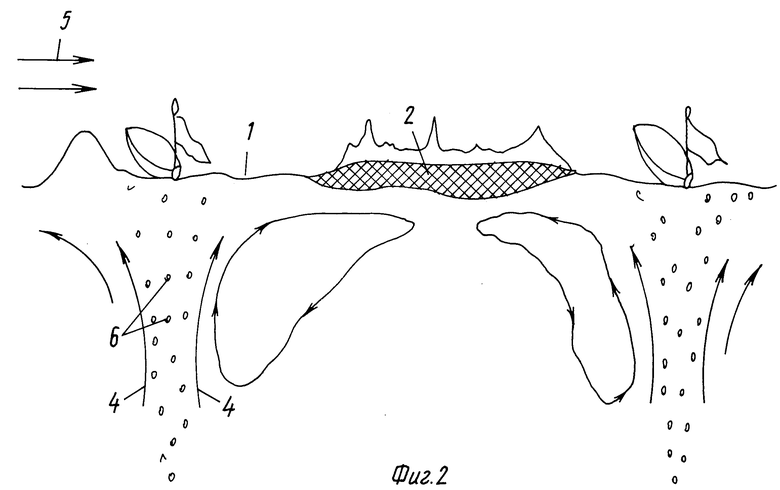
на фиг. 2 - схема постановки преграды;
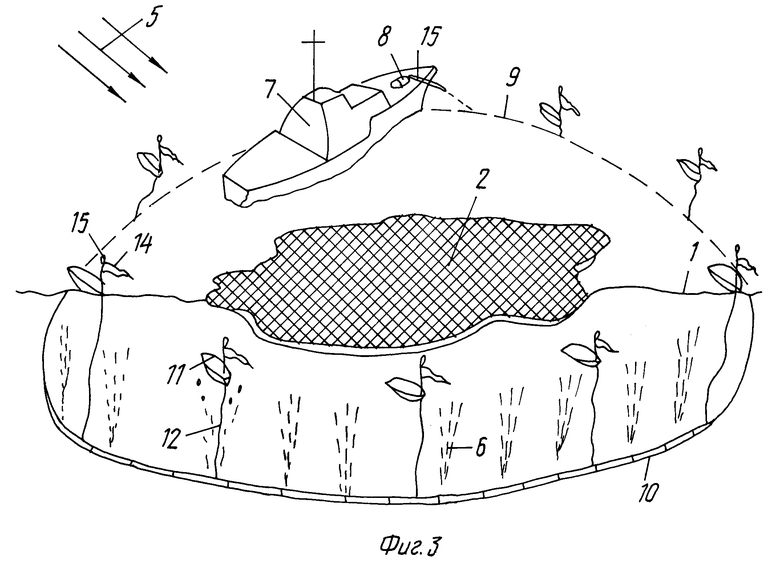
на фиг. 3 приведена конструкция устройства локализации.
Протяженная преграда 3 (фиг. 1) создается на водной поверхности 1 вокруг пятна загрязнения 2 восходящим к поверхности 1 потоком воды 4. Растекающаяся в обе стороны вода с одной стороны препятствует распространению пятна загрязнения 2, с другой стороны снижает волнение водной поверхности 1 с наветренной стороны 5.
Как показано на фиг 2, восходящие к поверхности потоки воды 4 могут создаваться всплывающими пузырьками газа 6. Циркуляция воды препятствует распространению даже горящего пятна загрязнения 2 и уменьшает амплитуду волн 5.
Устройство локализации плавающего на водной поверхности 1 пятна загрязнения 2 включает устройство создания преграды 3 пятну загрязнения в виде перфорированной гибкой трубы 9, соединенной с источником рабочего тела 8. Труба 9 прикреплена к балластным элементам 10, а заглубление трубы зафиксировано гибкими связями 12 между балластными 10 и плавучими 11 элементами.
Гибкие связи 12 могут быть выполнены в виде тросовых элементов и прикреплены с одной стороны к балластным элементам 10, с другой стороны - к плавучим элементам 11.
Плавучие элементы 11 выполнены в виде дистанционно управляемых буксировщиков.
Источник рабочего тела 8 может быть установлен на судне обеспечения 7, от которого отходит трубопровод 13 для подачи рабочего тела. Рабочим телом может быть жидкость или газ. На плавучих элементах, для удобства слежения за положением преграды 3, могут устанавливаться флаги 14 и световые сигнализаторы положения 15.
Устройство локализации плавающего на водной поверхности пятна загрязнения работает следующим образом.
Судно обеспечения 7 устанавливает вокруг пятна загрязнения 2 перфорированную гибкую трубу 9, которая заглубляется с помощью балластных элементов 10 и поддерживается на заданном углублении плавучими элементами 11 с помощью гибких связей 12 между ними. С источника рабочего тела 8 подается жидкость или газ. Восходящий к поверхности поток жидкости 4 образуется за счет протекания жидкости или газа через поры (отверстия) в гибкой трубе 9. Сплошной поток жидкости на водной поверхности растекается и отбрасывает пятно загрязнения 2 внутрь формируемой преграды. В необходимых случаях гибкая труба 9 выполняется замкнутой; замкнутой становится и протяженная преграда 3. Нефтесборщики и другие вспомогательные суда могут беспрепятственно проходить в промежутки между плавучими элементами 11 внутрь пятна загрязнения. Плавучие элементы 11, выполненные в виде дистанционно управляемых буксировщиков, например, связанных с судном обеспечения 7 энергоподающим кабелем, могут маневрировать и более гибко реагировать на поведение пятна загрязнения, создавая необходимую конфигурацию преграды 3. Преграда может также смещаться в необходимом направлении при перемещении буксировщиков - плавучих элементов 11.
Конструкция устройства проста, компактна и достаточно эффективна не только на спокойной воде, но и на волнении и позволяет создавать преграду даже горящим нефтепродуктам, не мешая при этом маневрам нефтесборщиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ РАБОТ НА АКВАТОРИИ | 2000 |
|
RU2170690C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2109654C1 |
| ТУРБОСЕПАРАТОР | 1995 |
|
RU2092230C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОСТАТОЧНОЙ ПЛАВУЧЕСТЬЮ, ДИФФЕРЕНТОМ И КРЕНОМ ПОДВОДНОГО УСТРОЙСТВА | 2001 |
|
RU2185304C1 |
| БУКСИРОВЩИК ВОДОЛАЗА (ВАРИАНТЫ) | 1999 |
|
RU2154591C1 |
| СУДОВОЕ УСТРОЙСТВО ДЛЯ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЙ ПОД ВОДОЙ | 1993 |
|
RU2093410C1 |
| ПОНТОН ПЛАВУЧЕГО ДОКА | 1991 |
|
RU2037453C1 |
| СПОСОБ КОНТРОЛЯ ХИМИЧЕСКОГО И ФАЗОВОГО СОСТАВА МЕТАЛЛОВ И СПЛАВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2085923C1 |
| ГАСИТЕЛЬ ПРОДОЛЬНЫХ КОЛЕБАНИЙ | 1995 |
|
RU2110710C1 |
| ЭЛЕКТРОХИМИЧЕСКИЙ ДВИГАТЕЛЬ | 2001 |
|
RU2201648C2 |
Изобретение предназначено для уменьшения размеров загрязненной поверхности в открытых водоемах с последующей возможностью очистки этой поверхности. Устройство локализации плавающего на водной поверхности пятна загрязнения выполнено в виде перфорированной гибкой трубы, соединенной с источником рабочего тела и прикрепленной к плавучим элементам гибкими связями. Плавучие элементы выполнены в виде дистанционно управляемых буксировщиков. Перфорированная труба прикреплена к балластным элементам. Заглубление трубы зафиксировано гибкими связями между балластными и плавучими элементами. Достигается возможность перемещения конструкции в процессе эксплуатации, что позволяет активно воздействовать на пятно загрязнения. 3 з.п. ф-лы, 3 ил.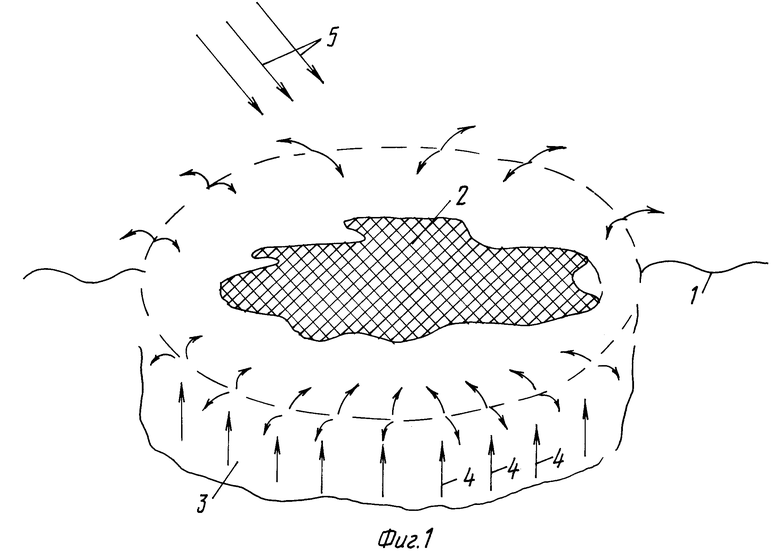
| GB, 2246981 A, 19.02.92 | |||
| SU, 916646 A, 30.03.82 | |||
| GB, 830701 A, 16.03.60 | |||
| US, 3992737 A, 23.11.76 | |||
| Кормак | |||
| Д | |||
| Борьба с загрязнениями моря нефтью и химическими веществами | |||
| - М.: Транспорт, 1989 г., с.74, 75, 203 - 205. |

