Изобретение относится к судостроению, в частности к средствам спуска-продъема объектов под водой.
Известно судовое устройство для спуско-подъемных операций под водой, содержащее порталы, установленные над вырезом в средней части судна, секционные грузонесущие органы, секции каждого из которых выполнены с соединительными узлами для связи между собой, по меньшей мере, один подъемно-опорный механизм для грузонесущих органов, связанных с грузозахватным приспособлением, стопорный механизм и захвата для грузонесущего органа, а также манипулятор складирования и подачи секций грузонесущего органа (авт. св. СССР N 885101, B 63 C 7/02, 1977).
Технический результата от использования изобретения заключается в обеспечении проведения работ при волнении поверхности акватории.
Этот технический результат достигается тем, что в судовом устройстве для спуско-подъемных операций под водой, содержащем упомянутые конструктивные элементы, опорно-подъемный механизм выполнен с двумя вертикальными балками, нижние концы которых жестко связаны между собой горизонтальной траверсой, а верхние шарнирно закреплены на портале с возможностью поворота этих балок вдоль диаметральной плоскости судна, а также поперечной балкой, установленной на вертикальных балках с возможностью перемещения вдоль них и выполненной с приводом ее перемещения. При этом захват для грузонесущего органа установлен на этой поперечной балке, а упомянутый стопорный механизм установлен на горизонтальной траверсе. Кроме того, каждая секция грузонесущего органа выполнена в виде плоской ленты.
Привод перемещения поперечной балки может быть выполнен с подвижными опорами, установленными на вертикальных балках с возможностью перемещения вдоль них и связанных с поперечной балкой гидроцилиндрами, а также с установленными на подвижных опорах и поперечной балке механизмами стопорения их на вертикальных балках.
Манипулятор складирования и подачи секций грузонесущего органа может быть установлен на палубе судна и выполнен в виде крана.
Секция грузонесущего органа может быть выполнена из нескольких лент, а соединительные узлы выполнены в виде жестко связанных с этими лентами разъемных цилиндрических проушин и соединительных пальцев, выполненных с возможностью установки в этих цилиндрических проушинах.
Стопорный механизм может быть выполнен с кулачками и приводом их поворота, при этом кулачки шарнирно установлены на горизонтальной траверсе с возможностью прохода между ними грузонесущего органа и взаимодействия с нижними поверхностями соединительного узла грузонесущего органа.
Кроме того, грузозахватные приспособления могут быть соединены между собой.
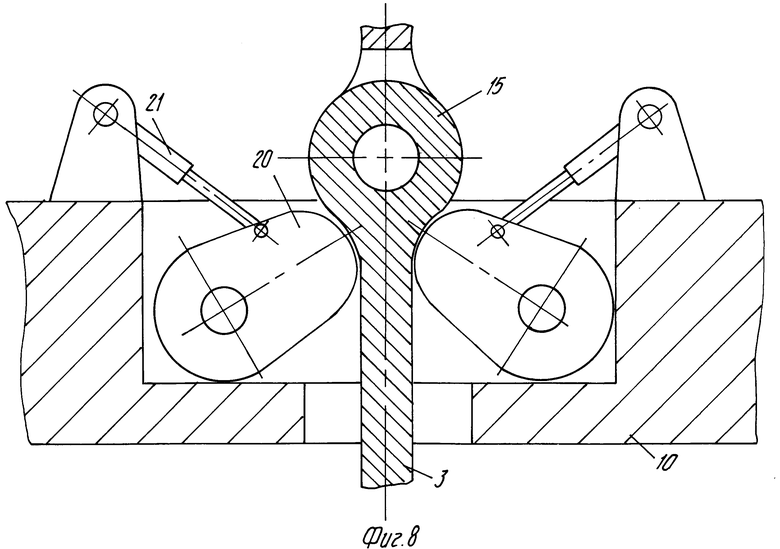
На фиг. 1 изображена общая схема устройств; на фиг.2 конструкция одного грузоподъемного устройства; на фиг.3 конструкция грузонесущего органа; на фиг.4 разрез А-А фиг.3; на фиг.5 грузонесущий орган из лент; на фиг.6 - привод перемещения поперечной балки; на фиг.7 разрез Б-Б фиг.6; на фиг.8 - стопорный механизм.
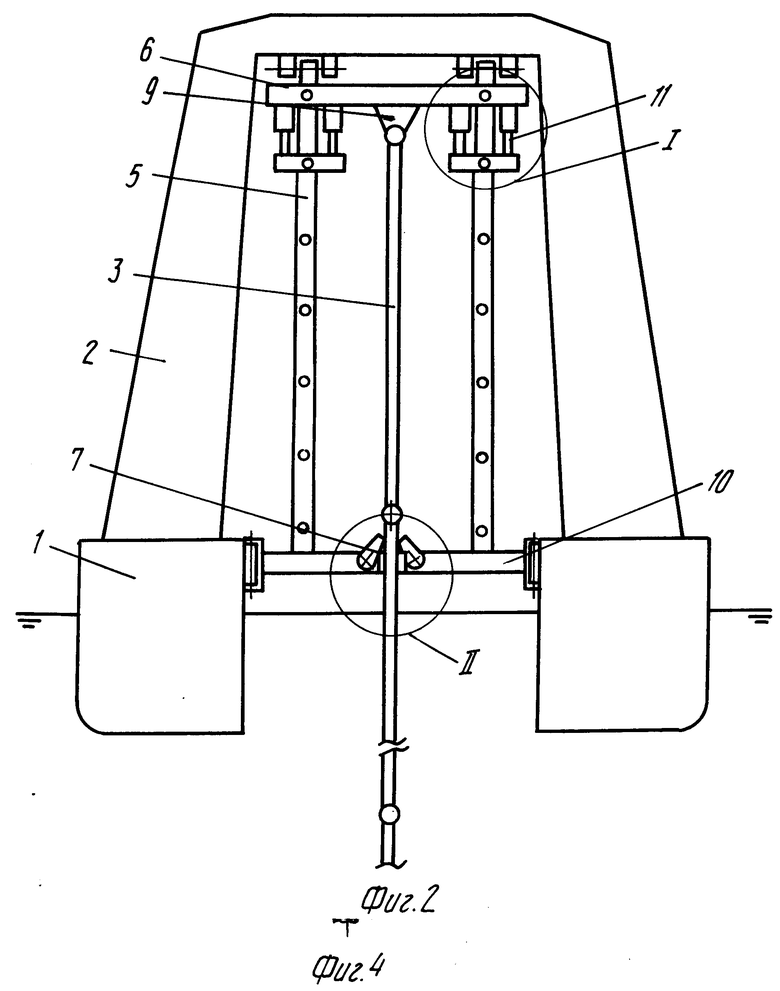
Судовое устройство для спуско-подъемных операций под водой установлено на судне-носителе 1 и включает в себя порталы 2, размещенные над вырезом в средней части судна, секционные грузонесущие органы 3, манипуляторы 4 складирования и подачи секций грузонесущего органа и, по крайней мере, один опорно-подъемный механизм для грузонесущих органов.
Опорно-подъемный механизм выполнен с двумя вертикальными балками 5, нижние концы которых жестко связаны между собой горизонтальной траверсой 10, а верхние шарнирно закреплены на портале с возможностью поворота этих балок 5 вдоль диаметральной плоскости судна 1. Кроме того, опорно-подъемный механизм содержит поперечную балку 6, установленную на вертикальных балках 5 с возможностью перемещения вдоль них и выполненную с приводом 11 ее перемещения. На этой поперечной балке 6 установлен захват 9 для грузонесущего органа 3, к нижней секции которого присоединено грузозахватное приспособление 8.
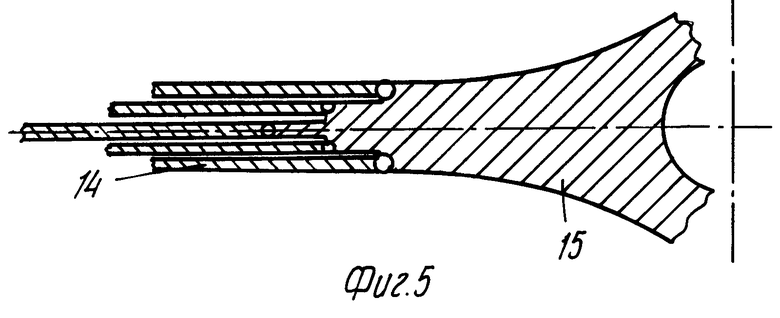
Секция грузонесущего органа 3 выполнена из одной или нескольких лент 14, жестко связанных своими концами с соединительными углами 15, выполненными в виде разрезных цилиндрических проушин и соединительных пальцев 12 для установки в этих проушинах с гидропроводом 13 перемещения этих пальцев.
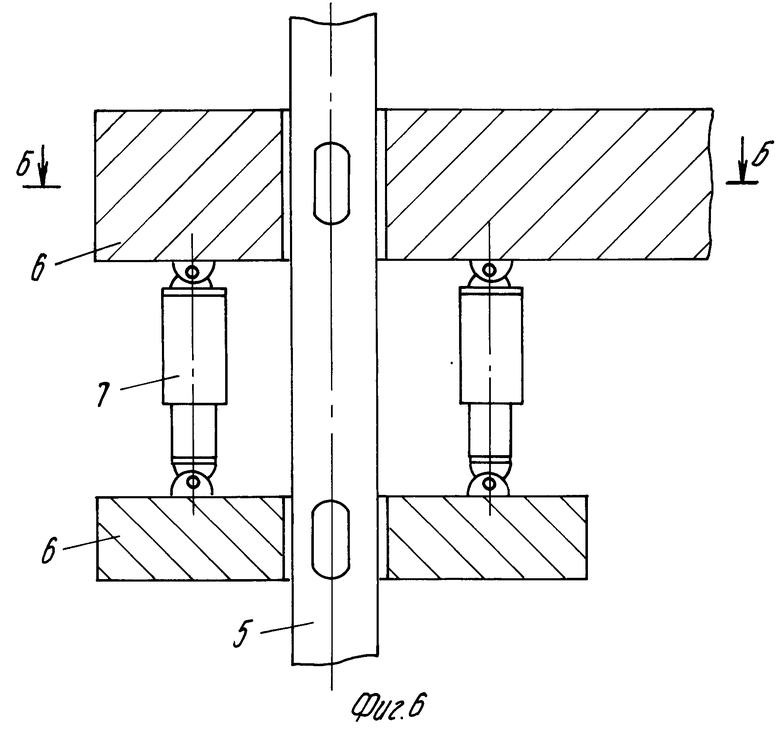
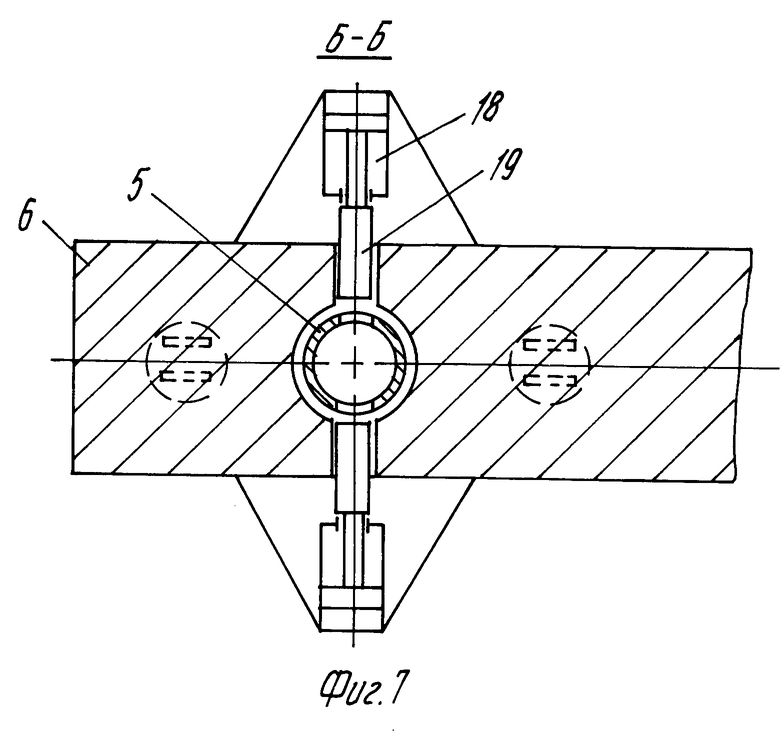
Привод 11 перемещения балки 6 содержит подвижные опоры 16, каждая из которых охватывает соответствующую вертикальную балку 5. Между подвижной опорой 16 и поперечной балкой 6 установлены гидроцилиндры 17. Кроме того, привод 11 содержит механизм стопорения, выполненный с установленными на балке 6 и подвижных опорах 16 пальцев 19 для взаимодействия с вертикальными балками 5, а также с гидроцилиндрами 18 для перемещения этих пальцев 19.
Стопорное устройство 7 состоит из кулачков 20, установленных на горизонтальной траверсе 10, с возможностью прохода между ними грузонесущего органа 3, и приводов 21 их стопорения.
При установке на судне-носителе 1 нескольких грузонесущих органов 3 с грузозахватными приспособлениями 8 последние могут быть соединены между собой.
Устройство работает следующим образом.
Секция грузонесущего органа 3, закрепленная одним своим концом в захвате 9 и соединенная другим своим концом с грузозахватным приспособлением, опускается подъемно-опорным механизмом до положения, когда верхний соединительный узел 15 не займет положение над стопорным механизмом 7, кулачки 20 которого входят в соприкосновение с нижней поверхностью узла 15 и стопорятся.
Следующая секция грузонесущего органа 3 с помощью манипулятора 4, выполненного, например, в виде установленного на палубе крана, закрепляется в захвате 9, который к этому времени совместно с поперечной балкой 6 занимает верхнее положение. Нижний соединительный узел этой секции стыкуется с верхним соединительным узлом предыдущей секции и фиксируется пальцем 12.
После расфиксации стопорного механизма 7 производят опускание этой секции грузонесущего органа 3 с последующей ее фиксацией аналогично опусканию предыдущей секции.
Аналогичным образом производят соединение последующих секций грузонесущего органа 3 до контакта грузозахватного приспособления с поднимаемым объектом. После закрепления последнего в грузозахватном приспособлении осуществляют подъем грузозахватного органа 3 с демонтажом его секций в обратном порядке.
Перемещение поперечной балки 5 по вертикальным балкам 5 осуществляют следующим образом.
Первоначально поперечная балка 6 стопорится с помощью установленных на ней пальцев 19 механизма стопорения, управляемых гидроцилиндром 20. Подвижная опора 16 перемещается с помощью гидроцилиндров 17 с последующим ее стопорением аналогично стопорению балки 6. Затем расстопаривают поперечную балку 6 и перемещают ее теми же гидроцилиндрами 17. После фиксации балки 6 указанные операции повторяются.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2062732C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2238876C2 |
| СУДОВОЕ УСТРОЙСТВО ДЛЯ ПОДАЧИ ПОД ВОДУ МАТЕРИАЛОВ | 1993 |
|
RU2071436C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2109654C1 |
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1994 |
|
RU2093727C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ РАБОТ НА АКВАТОРИИ | 2000 |
|
RU2170690C1 |
| СУДОВОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1991 |
|
RU2013301C1 |
| УСТРОЙСТВО ЛОКАЛИЗАЦИИ ПЛАВАЮЩЕГО НА ВОДНОЙ ПОВЕРХНОСТИ ПЯТНА ЗАГРЯЗНЕНИЯ | 1997 |
|
RU2127787C1 |
| ПОДЪЕМНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1997 |
|
RU2112736C1 |
| СТЫКОВОЧНЫЙ АГРЕГАТ | 2007 |
|
RU2341447C1 |


Сущность изобретения: устройство содержит установленные над вырезом в средней части судна порталы, секционные грузонесущие органы, связанные с грузозахватными приспособлениями, и подъемно-опорный механизм. Каждая секция упомянутого органа выполнена в виде плоской ленты с соединительными узлами на концах для соединения секций между собой. Опорно-подъемный механизм выполнен с двумя вертикальными балками, нижние концы которых жестко связаны с горизонтальной траверсой, а верхние - шарнирно закреплены на портале, и подвижно установленной на этих вертикальных балках поперечной балкой с приводом ее перемещения. 5 з.п. ф-лы, 8 ил.
| Экстраполятор | 1981 |
|
SU995101A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
