Изобретение относится к космической технике, более конкретно - к способам управления положением гибких элементов (ГЭ), используемых в качестве связи космических аппаратов (КА) или самостоятельных элементов, например электродинамических тросовых систем (ТС).
Одной из проблем использования в орбитальном полете ГЭ является "захлестывание" их при свертывании. Этот эффект связан с увеличением угловой скорости троса относительно базового КА - в соответствии с законом сохранения момента количества движения замкнутой системы.
Известен способ [1] обхода этого затруднения путем выбора соответствующего закона изменения длины сматываемого троса от времени. Но данный метод обладает малой скоростью подтягивания троса на конечном участке, так как противодействующая (гравитационная) сила крайне мала.
В качестве прототипа выбран способ /1/, традиционно используемый для устойчивого свертывания ГЭ и заключающийся в использовании реактивных двигателей (РД) в качестве демпфера колебаний и растягивающей силы троса. Однако этот метод обладает рядом недостатков:
1) большой вес привязанного КА, так как наряду с РД необходимо радиоустройство для приема команд на включение-выключение двигателя;
2) малый ресурс для многократно развертываемых ТС - следствие ограниченности запасов топлива;
3) малая надежность ТС из-за сложности привязанного КА (см. перечисление 1) и неуправляемости троса в случае его обрыва;
4) загрязненность атмосферы возле КА, что недопустимо при работе некоторых приборов.
Целью изобретения является устранение вышеприведенных недостатков при управлении положением ГЭ космических систем (КС).
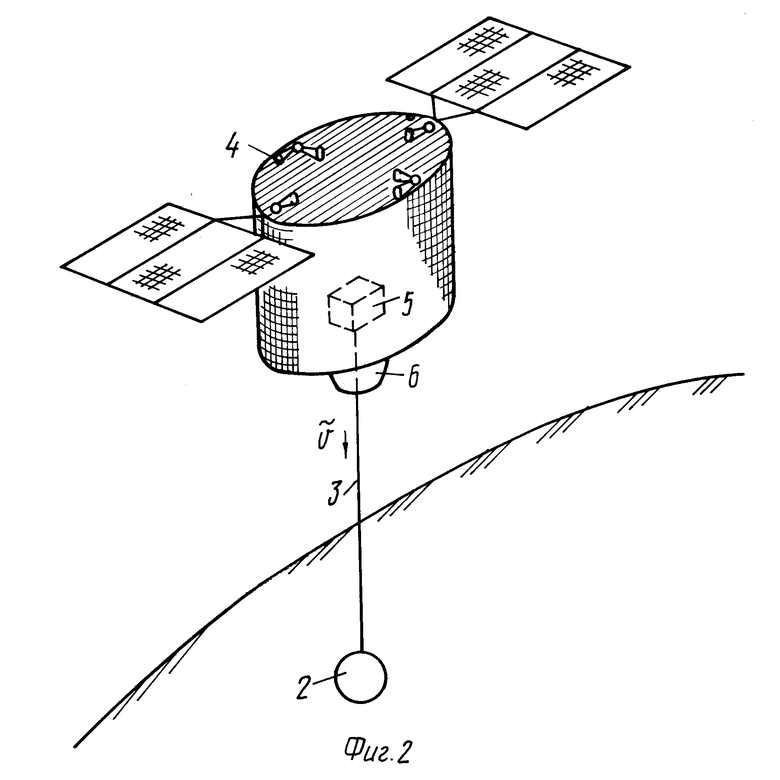
Поставленная цель достигается благодаря тому, что в известном способе управления положением ГЭ КС путем приложения к элементу усилий, предусмотрены следующие отличия: на ГЭ формируют криволинейный контур и с помощью него передают импульс силы в нужном направлении или, другими словами, генерируют "бегущие волны деформации" [2] . Указанные волны, в отличие от обычных (общеизвестных) поперечных волн, переносят в направлении своего распространения кроме энергии также и импульс силы за счет избытка массы на криволинейном участке ГЭ, перемещающегося с некоторой скоростью. (Можно отметить, что такой способ движения троса напоминает перемещение садовой гусеницы). Бегущие волны деформации для нашего случая аналогичны приложению реактивной силы к каждой точке троса в дискретные моменты времени. Эта дает возможность противодействовать отклонениям троса от требуемого положения.
На фиг. 1 показана схема, отражающая суть бегущих волн деформации, на которой показано два положения (сплошная и пунктирная линии) троса для мало отличающихся друг от друга моментов времени t и t';
на фиг. 2 - общий вид КС с ГЭ.
Рассматриваемая ТС состоит из базового 1 и привязного 2 КА, соединенных между собой тросом 3. Базовый КА 1 содержит систему ориентации с реактивными управляющими двигателями 4 в качестве исполнительных органов, систему управления тросом, которая включает блок 5 генерирования бегущих волн деформации, и устройство 6 для приема и удержания привязного КА 2.
Управление тросом осуществляется следующим образом. После выполнения программ исследования привязным КА 2 производится его подтягивание к базовому аппарату 1. Начиная с малого (10 км) расстояния, с которого возможна опасность захлестывания троса 2, система его управлением включается в режим формирования бегущих волн. Для этого базовый КА 1 предварительно ориентируют в положение, обеспечивающее требуемое направление распространения волн. Далее по сигналам датчиков натяжения и длины (до привязного КА 2) троса 3 генерируются бегущие волны. Варьируемыми параметрами, определяющими интенсивность воздействия на трос 3 могут быть частота f, скорость  и избыток массы Δm (длины Δl) ) волн. Естественно, что суммарный массоперенос в направлении базового КА 1 за счет подтягивания троса 3 должен превышать в целом обратный поток массы, обусловленный бегущими волнами. При полной уборке троса 3 привязной КА 2 фиксируется в приемном устройстве 6.
и избыток массы Δm (длины Δl) ) волн. Естественно, что суммарный массоперенос в направлении базового КА 1 за счет подтягивания троса 3 должен превышать в целом обратный поток массы, обусловленный бегущими волнами. При полной уборке троса 3 привязной КА 2 фиксируется в приемном устройстве 6.
Для подтверждения работоспособности метода проведены расчеты при следующих допущениях. Орбита: круговая, высота полета базового КА над поверхностью Земли 200 км, привязной КА отсутствует; трос расположен в направлении КА - центр Земли, диаметр 2 мм, материал кевлар (плотность 1,45 г/см3); характеристики бегущих волн; избыток массы  Оценки показали, что средние по длине троса значения сил, действующих на него от бегущих волг, P = 0,045 H, а от гравитационных и центробежных при длине троса, например, L = 4 км - F = 0,034 H, то есть коэффициент "избытка силы" k = P/F = 1,3, причем с уменьшением длины троса это значение резко возрастает и при L = 1 км составит уже 21.
Оценки показали, что средние по длине троса значения сил, действующих на него от бегущих волг, P = 0,045 H, а от гравитационных и центробежных при длине троса, например, L = 4 км - F = 0,034 H, то есть коэффициент "избытка силы" k = P/F = 1,3, причем с уменьшением длины троса это значение резко возрастает и при L = 1 км составит уже 21.
Предлагаемый способ управления положением ГЭ КС обладает следующими техническими преимуществами перед прототипом:
1) улучшенными габаритно-весовыми характеристика привязного КА;
2) увеличенной надежностью системы, в частности, из-за возможности управления тросом при его обрыве;
3) увеличенным ресурсом, так как снято ограничение на расходуемые материалы (топливо РД);
4) исключено загрязнение атмосферы возле КА продуктами истечения РД.
Экономическая эффективность изобретения следует непосредственно из приведенных технических преимуществ.
Данный способ может быть применен не только для решения рассмотренной задачи, но и для более широкого класса операций, связанных с ориентацией, формированием и поддержанием устойчивого положения ГЭ, например для ускоренного выпуска троса и его переориентации, для образования антенн, электродинамических и других ТС. То есть предлагаемый метод обладает универсальностью использования в условиях космического пространства при малых внешних (гравитационных, аэродинамических и др.) возмущениях.
Источники информации
1. Андреев А.В., Хлебников Н.Н. Космические системы с гибкой связью. - М.: ВИНИТИ, 1991 (прототип).
2. Добролюбов А. И. Волновые движения деформируемых тел и жидкостей. - Минск: Наука и техника. 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО НАДУВНОЙ ПАССИВНОЙ СИСТЕМЫ ТОРМОЖЕНИЯ ПОСЛЕДНЕЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ | 2000 |
|
RU2199474C2 |
| СПОСОБ ВВОДА В ДЕЙСТВИЕ ПАРАШЮТНОЙ СИСТЕМЫ СПУСКАЕМОГО АППАРАТА | 2001 |
|
RU2214950C2 |
| СОЛНЕЧНАЯ БАТАРЕЯ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2167793C2 |
| СПОСОБ СПУСКА СПУСКАЕМОЙ КАПСУЛЫ С БОРТА КОСМИЧЕСКОГО АППАРАТА НА ЗЕМЛЮ | 2001 |
|
RU2200116C2 |
| СВЕТОЗАЩИТНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО АППАРАТА | 1997 |
|
RU2128134C1 |
| СОЛНЕЧНАЯ БАТАРЕЯ КОСМИЧЕСКОГО АППАРАТА | 2002 |
|
RU2214949C1 |
| СПОСОБ ОТРАБОТКИ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2001 |
|
RU2207309C2 |
| ДОЛГОВРЕМЕНЫЙ ПИЛОТИРУЕМЫЙ ОРБИТАЛЬНЫЙ ТРОСОВЫЙ КОМПЛЕКС | 1993 |
|
RU2088491C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ВОЗДЕЙСТВИЯ СОЛНЕЧНОЙ БАТАРЕИ С ПРИВОДОМ НА КОСМИЧЕСКИЙ АППАРАТ | 2000 |
|
RU2196088C2 |
| СФЕРИЧЕСКИЙ ГАЗОСТАТИЧЕСКИЙ ПОДШИПНИК | 2000 |
|
RU2191936C2 |
Изобретение относится к космической технике и более конкретно - к способам управления положением гибких элементов, используемых в качестве связи космических аппаратов, или самостоятельных элементов, например электродинамических тросовых систем. Согласно изобретению, способ управления заключается в приложении к гибкому элементу усилий, при этом на данном элементе формируют криволинейный контур и с помощью него передают импульс силы в требуемом направлении. Другими словами, на гибком элементе создают так называемые "бегущие волны деформации", переносящие с некоторой скоростью избыток массы гибкого элемента с одного его конца на другой. Изобретение позволяет повысить эффективность управления положением гибкого элемента. 2 ил.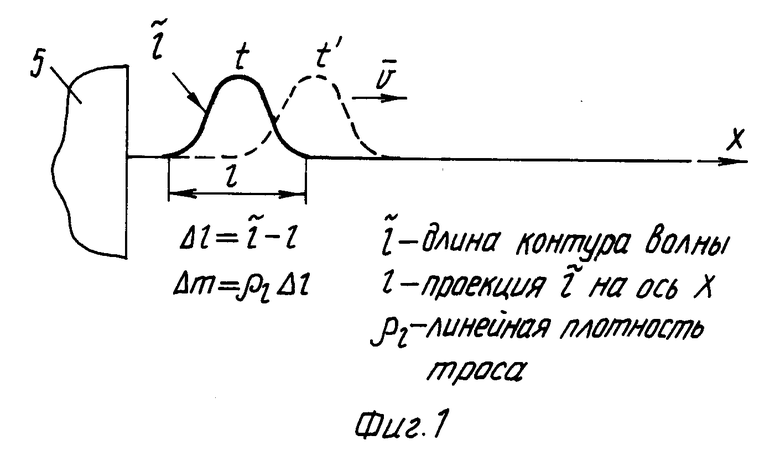
Способ управления положением гибких элементов, например тросов, космических систем путем приложения к элементу усилий, отличающийся тем, что на гибком элементе формируют криволинейный контур и с помощью него передают импульс силы в нужном направлении.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Андреев А.В., Хлебникова Н.Н | |||
| Космические системы с гибкой связью | |||
| Итоги науки и техники | |||
| Ракетостроение и космическая техника | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| - М., ВИНИТИ, 1991, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Добролюбов А.И | |||
| Волновые движения деформируемых тел и жидкостей | |||
| - Минск: Наука и техника, 1989 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| US N 3729068 A; 24.04.73 | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
