Изобретение относится к автоматике и вычислительной технике и может быть использовано для связи измеряемой аналоговой величины, представленной в виде угла поворота, с цифровым вычислительным устройством и получения результатов измерения в виде цифрового кода.
Известен преобразователь угол - код на основе фазового датчика угла с вращающимся модулятором (Электромеханические преобразователи угла с электрической редукцией. -М.: Энергия, 1978, с. 148 - 175). Фазовые датчики содержат модулятор, вращающийся с постоянной скоростью, в результате чего осуществляется периодическая с постоянной частотой модуляция физической величины. Основу фазового датчика составляют две пары зубчатых колес. Зубчатые колеса каждой пары разделены воздушным зазором. Одно из колес с внутренним зубом крепится на корпусе датчика - статор, а другое колесо крепится на входном валу, угловое положение которого измеряется, - ротор. В колесах ротора и статора проделаны канавки, в которые уложены круговые обмотки, в которых вырабатываются периодические сигналы. Разность фаз выходных сигналов индуктивного датчика угла пропорциональна измеряемому углу.
Недостатком преобразователя угол - код на основе фазового датчика угла с вращающимся модулятором является необходимость использования специальной аппаратуры для преобразования электрических сигналов в код, а также низкая помехозащищенность этих устройств.
Известен преобразователь угла поворота вала в код (авт.св. 503268, МКИ G 08 C 9/00), который является наиболее близким из известных устройств по решаемой задаче и технической сущности и который содержит фазовый датчик угла, в корпусе которого укреплен статор синхронного электродвигателя и зубчатый венец с обмоткой. Зубчатый венец с обмоткой укреплен на входном валу. Ротор-модулятор с экраном жестко соединен с ротором синхронного электродвигателя и безобмоточными венцами и установлен на подшипниках внутри статора синхронного электродвигателя. Подшипники крепятся к корпусу датчика прижимной крышкой. У зубчатых венцов с обмотками зубья выполнены на внешней цилиндрической поверхности. Обмотки зубчатых венцов электрически соединены с входами интегрирующего фазометра. Зубчатые венцы с обмотками установлены с равномерным радиальным зазором внутри безобмоточных зубьев, число которых и число пар полюсов 2p синхронного электродвигателя выбрано из условия удовлетворения уравнению нониуса.
Недостатком преобразователя угла поворота вала в код также является необходимость использования специальной аппаратуры для преобразования электрических сигналов в код, и также низкая помехозащищенность этих устройств.
Общими существенными признаками заявляемого устройства и известного наиболее близкого является наличие датчика угла поворота и скорости, включающего статор и ротор.
Отличительными существенными признаками является то, что внутри статора датчика угла поворота и скорости соосно установлены диск с кодовой цифровой информацией, закрепленный на валу, и ротор привода диска, размещенный внутри статора привода диска, при этом на статоре и роторе датчика попарно установлены считывающие кодовую информацию головки, между которыми установлен с возможностью вращения диск с кодовой информацией, при этом считывающие кодовую информацию головки через согласующее устройство подключены ко входу микропроцессора ПЭВМ.
В преобразователе угла поворота и скорости вала в код в качестве диска с кодовой информацией можно использовать в описанном выше датчике угла поворота и скорости жесткий диск ПЭВМ или гибкий диск ПЭВМ.
Считывающие кодовую информацию головки могут быть установлены попарно на роторе и статоре датчика и сдвинуты друг относительно друга на 180o или на 90o (при установке 4-х головок). В преобразователе угла поворота и скорости вала в код между валом диска и валом статора датчика, а также между валом ротора датчика и валом статора датчика встроены люфтовыбирающие устройства. В качестве привода диска с кодовой информацией используется частотно-управляемый двигатель с возможностью регулирования скорости вращения его ротора. При этом ось объекта соединена с осью ротора датчика.
Технический результат, который может быть достигнут при использовании изобретения заключается в том, что заявляемый преобразователь угла поворота и скорости вала в код может быть изготовлен на базе использования выпускаемых в настоящее время дисководов и винчестеров или их отдельных элементов, используемых в персональных электронных вычислительных машинах (ПЭВМ). При этом существенными преимуществами заявляемого преобразователя являются отсутствие специальной аппаратуры преобразования электрических сигналов в коды, так как запись, считывание и обработка производятся в ПЭВМ, а также возможность проведения в процессе эксплуатации доработок или видоизменения математического обеспечения и информации, наносимой на гибкие или жесткие диски без конструктивных доработок самих преобразователей. Основными элементами датчика угла поворота и скорости преобразователя являются гибкие или жесткие диски с наносимой на них кодовой информацией и блоки головок, наносящих или считывающих эту информацию с дисков. При этом для особо точных датчиков могут быть использованы аналогичные по назначению дисководы с лазерными считывающими устройствами, отличительным преимуществом и достоинством которых является существенно большая помехозащищенность, что является важным для объектов управления, имеющих в своем составе устройства с большим уровнем электрических помех.
Сущность изобретения поясняется на чертежах, где на фиг. 1 изображена структурная схема датчика угла и скорости заявляемого преобразователя угла поворота и скорости вала в код, где 1 - вал ротора,
2 - считывающие головки ротора,
3 - шарикоподшипник,
4 - считывающие головки статора,
5 - гибкий или жесткий диск,
6 - ротор,
7 - статор,
8 - обмотка привода диска,
9 - ротор привода диска,
10 - вал диска,
11 - люфтовыбирающее устройство привода диска,
12 - люфтовыбирающее устройство ротора диска,
13 - подшипниковый узел ротора,
14 - вал статора датчика.
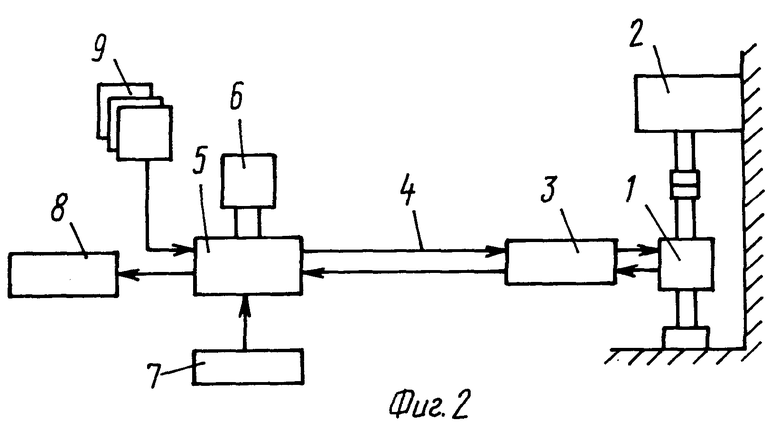
На фиг. 2 приведена блок-схема преобразователя угла поворота и скорости вала в код, где 1 - датчик преобразователя угла поворота и скорости вала в код,
2 - объект,
3 - согласующее устройство,
4 - кабель связи с ПЭВМ,
5 - ПЭВМ,
6 - монитор ПЭВМ,
7 - клавиатура ПЭВМ,
8 - принтер ПЭВМ,
9 - пакет программ.
В основе работы устройства заложено преобразование формируемых в процессе вращения ротора преобразователя относительно его статора электрических сигналов различной формы в коды углов поворота осей.
Устройство работает следующим образом: датчик преобразователя 1 своим статором закрепляется на неподвижном основании объекта 2 (фиг. 2), ротор датчика соединяется с поворотной осью объекта 2, от считывающих головок статора 4 (фиг. 1) и считывающих головок ротора 2 (фиг. 1) информация выводится на согласующее устройство 3 (фиг. 2), которое, как правило, используется при значительном удалении объектов информации от ПЭВМ. Далее по кабелю связи 4 (фиг. 2) информация передается на микропроцессор ПЭВМ 5 (фиг. 2). В ПЭВМ предварительно записывается определенная программа, используемая или только для считывания информации и математической обработки результатов измерений, или и для записи информации на диск датчика. Данные в удобной для оператора форме выводятся на монитор ПЭВМ 6 (фиг. 2), а в замкнутой системе управления в виде определенных кодов и на регуляторы силового электропривода, отрабатывающего ошибки программного наведения. При считывании углового положения ротора 6 (фиг. 1) датчика преобразователя относительно статора 7 (фиг. 1) во время плавного поворота осей объекта можно формировать и код скорости. В этом случае устройство фактически исполняет роль датчика угла и скорости.
Формирование кодов углов и скоростей вращения производится в следующем порядке:
считывающие головки статора 4 (фиг. 1) и считывающие головки ротора 2 (фиг. 1) при начальном нулевом угле поворота считывают при вращении диска одинаковые коды - от начальных и до конечных кодов, замыкающих один полный оборот диска. При угловом повороте ротора датчика преобразователя 6 (фиг. 1) с головок статора 4 (фиг. 1) и головок ротора 2 (фиг. 1) снимаются различные коды, сравнение которых позволяет измерять угловые повороты ротора датчика относительно его статора. Одним из простых вариантов отсчета кодов является выдача стартового сигнала для начала съема информации в момент прохождения нулевого отсчета мимо головок статора 4 (фиг. 1). Затем, когда нулевой отсчет проходит у головок ротора 2 (фиг. 1), формируется команда на считывание кода угла с головок статора датчика. Этот код является основным носителем информации об угле поворота ротора датчика преобразователя, используемой в ПЭВМ для дальнейших операций в соответствии с назначением устройства и объекта, на котором он смонтирован. Для измерения больших или сравнительно больших скоростей вращения оси объекта (без ограничения числа оборотов оси в любом направлении) ось объекта должна быть соединена с осью диска, а информация считываться с головок статора датчика. На фиг. 1 изображено устройство, в котором установлен один диск 5, с использованием информации на обеих его сторонах. Особенностью конструкции является использование двух сборок головок, сдвинутых друг относительно друга (на роторной и на статорной частях преобразователя) на 180o. Такое их расположение обеспечивает существенное снижение путем обработки ошибки из-за эксцентриситета текущего положения диска относительно осей корпусов ротора и статора датчика преобразователя. Независимо от конкретной реализации конструкции устройства выбор люфтов во вращающихся частях устройства обязателен, как одно из основных условий стабильности и точности показаний устройства. В качестве привода диска 5 (фиг. 1) желательно использование частотно-управляемых двигателей с возможно более широким диапазоном регулирования скорости вращения ротора. Это обеспечивает особые преимущества и возможности при использовании дисководов или винчестеров с лазерными устройствами считывания информации. Для магнитных головок существенное уменьшение скорости вращения диска может привести к недопустимому снижению уровня сигнала, снимаемого с магнитных головок. При управлении скоростью вращения диска можно существенно увеличить технический ресурс преобразователя и снизить динамические нагрузки на элементы конструкции датчика заявляемого устройства.
Использование заявляемого преобразователя угла поворота и скорости вала в код позволяет значительно снизить стоимость изготовления и наладки устройства по сравнению с используемыми в настоящее время цифровыми датчиками и аппаратурой преобразования. При этом обеспечивается значительное повышение точности измерений.
Создание же новых отечественных преобразователей угла поворота и скорости вала в код и аппаратуры преобразования в настоящее время стало практически невозможным из-за отсутствия соответствующей, отвечающей современным требованиям элементной базы, а также из-за трудностей обеспечения высокотехнологических процессов.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В ДВОИЧНО-ДЕСЯТИЧНЫЙ КОД | 1973 |
|
SU368633A1 |
| Магнитный преобразователь углового положения вала в код | 1978 |
|
SU765848A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1088046A1 |
| ДВУХОТСЧЕТНЬШ ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТАВАЛА В КОД | 1964 |
|
SU429447A1 |
| Индуктосин | 1983 |
|
SU1103329A2 |
| ПРЕОБРАЗОВАТЕЛЬ «УГОЛ — КОД» | 1973 |
|
SU397953A1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| ПОВОРОТНЫЙ УГЛОМЕРНЫЙ СТОЛ | 2015 |
|
RU2596693C1 |
| Преобразователь угла поворота вала в электрический сигнал | 1980 |
|
SU894363A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для представления измеряемого угла в виде цифровой величины. Техническим результатом является повышение помехозащищенности. Преобразователь угла поворота и скорости вала в код содержит датчик угла поворота, внутри статора которого установлен диск с кодовой цифровой информацией, закрепленный на валу, и ротор привода диска, размещенный внутри статора привода диска. На статоре и роторе установлены считывающие кодовую информацию головки, через согласующее устройство подключенные ко входу микропроцессора ПЭВМ. 8 з.п.ф-лы, 2 ил.
| Преобразователь угла поворота вала в код | 1973 |
|
SU503268A1 |
| Электромеханические преобразователи угла с электрической редукцией./Под ред | |||
| Ахметжанова А.А | |||
| - М.: Энергия, 1978, с.149. | |||
