Изобретение относится к измерите ной технике и может быть использова но для прецизионного преобразования углов поворота валов в код: в радио телескопах совместно с другими устройствами, также требующими соосног с осями телескопа расположения, а также в системах числового программного управления металлорежущими станками. По основному авт. ев, 555516 известен индуктосин, имеющий оптимальную с точки зрения стабильности относительного расположения рабочих обмоток, расположенных на его роторе и статоре, конструкцию. Наилучшие механические параметры достигну ты благодаря концентричному размеще нию опорного и радиального шарикоподшипников и совпадению плоскостей в которых расположены шарики указан ных подшипников и воздушный зазор межобмоточного пространства индукто сина. Это обеспечивает его высокие метрологические качества, благодаря которым -индуктосин используется в качестве первичного прецизионного угол-код преобразователя Поскольку индуктосин является мн гополюсным датчиком угла, диапазон угловых измерений, обеспечиваемый с его использованием, определяется уг ловым размером его полюсного делени Применение индуктосина в качестве прецизионного датчика угла в отсчет ных устройствах с диапазоном угловых измерений от О до 360°, в связи с его многополюсностью, возможно только совместно с датчиками грубой шкалы. В качестве датчиков грубой шкалы могут быть использованы требующие независимого привода двухполюсные вращающиеся трансформаторы, кодовыедатчики различного принципа действия индуктосины со спиральными обмотками и т.п. Для работы совместно с индукт сином датчик грубой шкапы необходимо соединить с валом, угол которого измеряется через отдельную кинематическую цепь (редуктор, дополнительный вал), обеспечивающую передачу углового перемещения сограниченной точностью 1. Недостатком известного индуктосина является небольшой диапазон измерения и невозможность в связи с этим его использования в ряде устройств.. Цель изобретения - расширение диа пазона угловых измерений, а также расширение области его применения. Цель достигается тем, что индукто син. содержащий корпус, в котором закреплен статор, ротор, размещенный на валу и установленный соосно статору на радиальных и упорных шарико.подшипниках, радиальный и упорный шарикоподшипники установлены концент рично так, что плоскости, в которых расположены шарики подшипников совпадают, а внешняя обойма третьего шарикоподшипника подпружинена, снабжен полым цилиндром, размещенным на роторе соосно с ним с кольцевым пазом, на стенках которогонанесены кодовые дорожки датчика грубого отсчета, и считывающими блоками, закрепленными на статоре, установленными эксцентрично на валах с возможностью поворота и фиксации и подпружиненными в направлении кодовых дорожек. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - блоки считывающих элементов; на фиг. 3 - разрез А-А на фиг. 2, Устройство содержит плоский индуктосин, состоящий из ротора 1 и статора 2 с обмотками, на роторе 1 размещен полый цилиндр 3 с радиальным пазом, на стенках которого 4 и 5 размещены восемь кодовых дорожек. Два считывающих блока 6 с датчиками установлены на кронштейнах 7 на статоре, подпружинены и базируются через шарикоподшипники 8 с эксцентрично установленными валами на поверхность кодовых дорожек 4 и 5. Пружина 9 прижимает считывающие блоки к поверхности кодовых дорожек. Для установки считывающих блоков в нулевое положение относительно полого цилиндра 3 имеются юстировочные винты 10, с помощью которых по меткам 11 уточняют положение считывающих блоков в малых пределах. Для обеспечения привязки нуля грубой шкалы преобразователя уголкод после монтажа индуктосина на объекте полый цилиндр-с кодовыми дорожками выполнен таким образом, что может быть повернут в любых пределах до совпадения меток 11 с последующей фиксацией на роторе. Поворотом эксцентриковых осей 12 устанавливается зазор А между поверхностью кодовых дорожек 4 и датчиками считывающего блока 6, который подпружинен пружиной 9. При вращении ротора 1 и полого цилиндра 3 поверхнос гь кодовых дорожек переместится относительно датчиков считывающих блоков, при этом величина зазора А зависит только от погрешностей изготовления шарикоподшипников и практически неизменна. Достигаемая таким образом высокая стабильность воздушного зазора позволяет получить высокую стабильность электрических параметров рчитывающих элементов, размещенных в считывающих блоках (например, электромагнитных) , что повышает надежность считывания. Кодовые комбинации различных дорожек, считываемые блоками б, зависят только от относительного углового положения цилиндра 3 на ро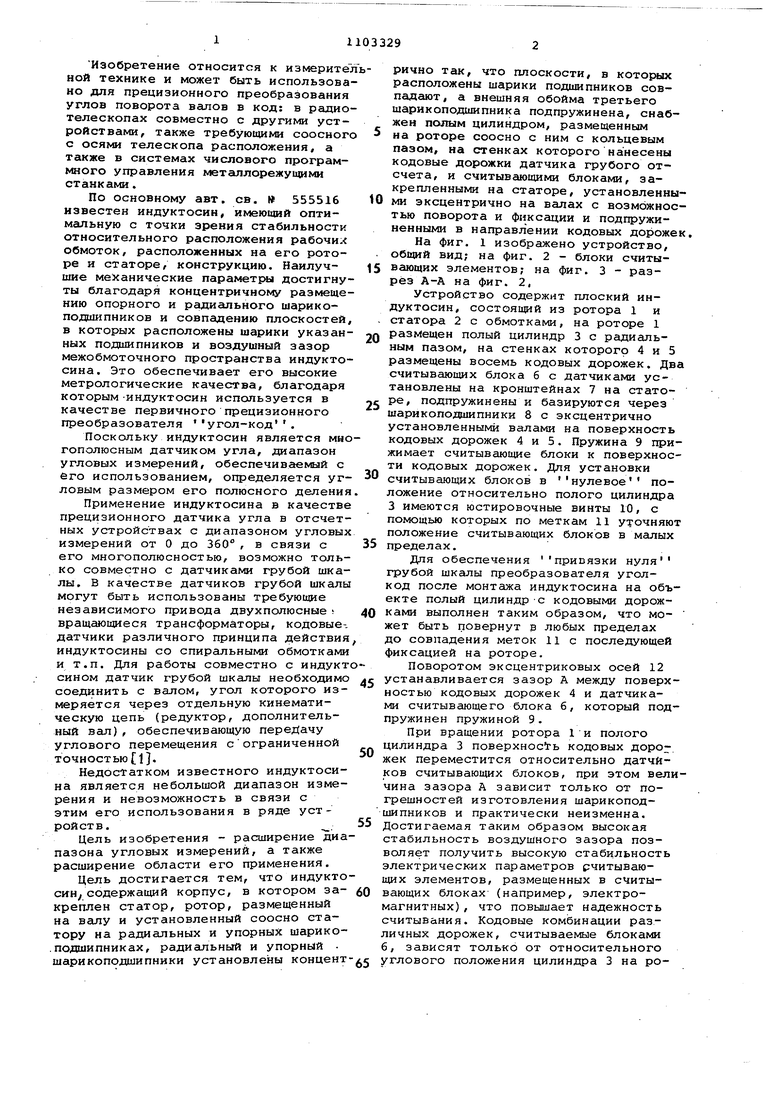

| название | год | авторы | номер документа |
|---|---|---|---|
| Емкостной абсолютный преобразователь угловых перемещений | 2021 |
|
RU2773267C1 |
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2148788C1 |
| Индуктосин | 1975 |
|
SU555516A1 |
| Емкостной абсолютный преобразователь угловых перемещений | 2019 |
|
RU2724150C1 |
| Индуктивный абсолютный преобразователь угловых перемещений | 2021 |
|
RU2788423C2 |
| ПРЕОБРАЗОВАТЕЛЬ КРУГОВЫХ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2057287C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2720052C1 |
| Устройство для двухканальной дистанционнойпЕРЕдАчи углА | 1979 |
|
SU851672A1 |
| Преобразователь угла поворота вала в код | 1976 |
|
SU746658A1 |
ИНДУКТОСИН по авт. св. 555516, отличающийся 4 S тем, что, с целью расширения диапазона угловы.х измерений и расширения области применения, он снабжен полым цилиндром, размещенным на роторе соосно с ним с кольцевым пазом,на стенках которого нанесены кодовые дорожки датчика грубого отсчета, и считывающими блоками, закрепленными шарнирно на статоре, установленными эксцентрично на валах с возможностью поворота и фиксации и подпружиненными в направлении кодовых дорожек. (Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
