Изобретение относится к землеройным машинам, конкретно к экскаваторам на гусеничном ходу.
Известна рама хода гусеничного экскаватора, имеющая форму в поперечном сечении в виде арки и состоящая из верхнего и нижнего листов, которые соединены между собой ребрами и кольцевой опорой. Рама содержит элементы для монтажа опорных катков и узлы крепления приводного и натяжного механизмов гусеничной ходовой части экскаватора [1].
Недостатком такой конструкции является то, что верхний и нижний листы имеют большие габариты, требующие больших затрат на их изготовление. Кроме того, соединение верхнего и нижнего листов посредством ребер увеличивает трудоемкость сборочных и сварочных работ из-за отсутствия свободного доступа и как следствие не обеспечивает стабильности качества сварочных швов.
Известна также рама хода, выбранная в качестве прототипа, включающая кольцевую опору для крепления поворотной опоры, верхний и нижний листы, выполненные в поперечном сечении в виде арки и соединенные ребрами, причем нижний лист своими продольными краями соединен с боковыми стенками верхнего изогнутого листа, рама хода содержит элементы для крепления натяжного и приводного механизмов гусеничной части, и элементы для крепления опорных катков, которые с одной стороны закреплены на упомянутых листах, а с другой - на Г-образных профилях, которые своими продольными краями боковых торцев и посредством ребер прикреплены к боковым стенкам верхнего листа [2].
Недостатком такой конструкции является то, что соединение продольных краев нижнего листа с боковыми стенками верхнего листа требует больших технологических затрат на подгонку для обеспечения необходимого качества соединения.
Целью изобретения является снижение трудоемкости соединения нижнего и верхнего листов рамы хода.
Указанная цель достигается тем, что рама хода гусеничного экскаватора, включающая кольцевую опору для крепления поворотной опоры, верхний и нижний листы, выполненные в поперечном сечении в виде арки, соединенные ребрами и тем, что нижний лист своими продольными краями связан с верхним листом, элементы для монтажа приводного и натяжного механизмов гусеничной ходовой части, и элементы для монтажа опорных катков, которые с одной стороны закреплены на упомянутых листах, а другой - на Г-образных профилях, которые своими продольными краями боковых торцев и посредством ребер прикреплены к боковым стенкам верхнего листа, выполнена так, что нижний лист своими продольными краями соединен с верхним листом посредством промежуточного элемента.
В качестве промежуточного элемента может быть использован элемент для монтажа опорных катков.
Кроме того, данные цели достигаются в различных исполнениях конструкций рам хода гусеничного экскаватора с Г-образными профилями, которые своими продольными краями боковых торцев и посредством ребер прикреплены к боковым стенкам верхнего листа.
Например: а) в раме, которая содержит те же элементы, но кольцевая опора для крепления поворотного устройства связывает верхний и нижние листы, б) в раме, которая содержит те же элементы, но кольцевая опора закреплена на верхнем листе, в) в раме, которая содержит те же элементы, но на верхнем и нижних листах выполнены окна, и другие подобные исполнения с Г-образными профилями.
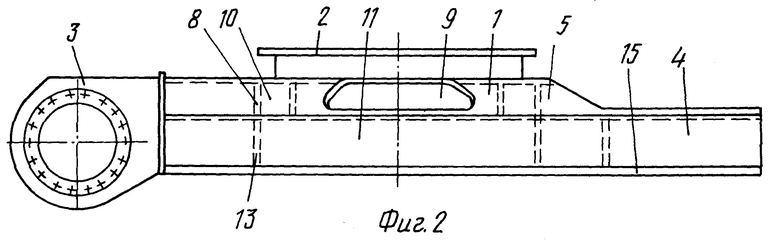
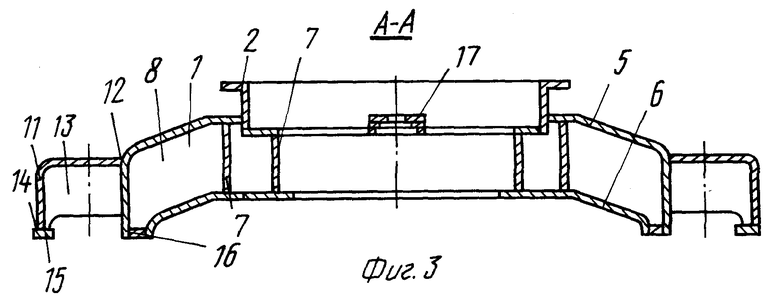
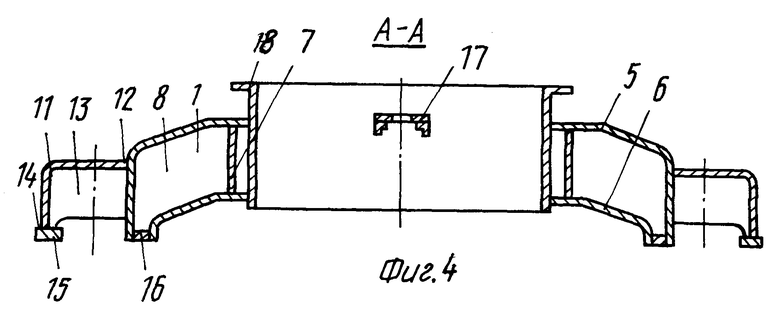
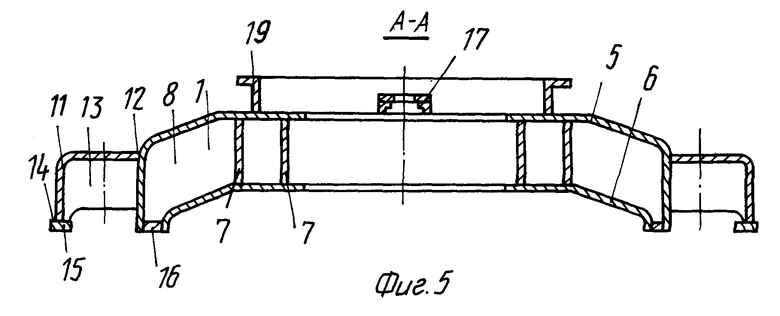
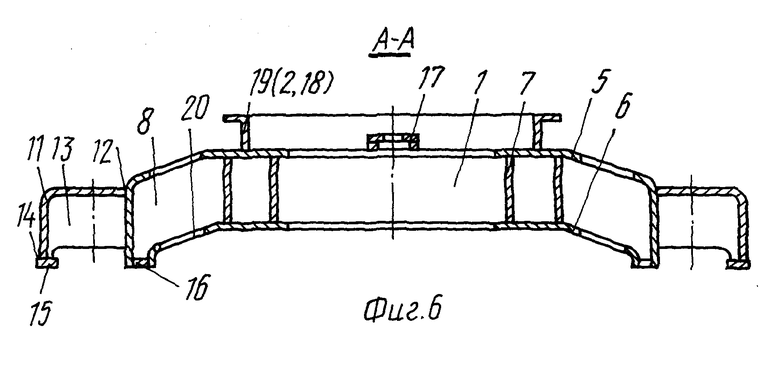
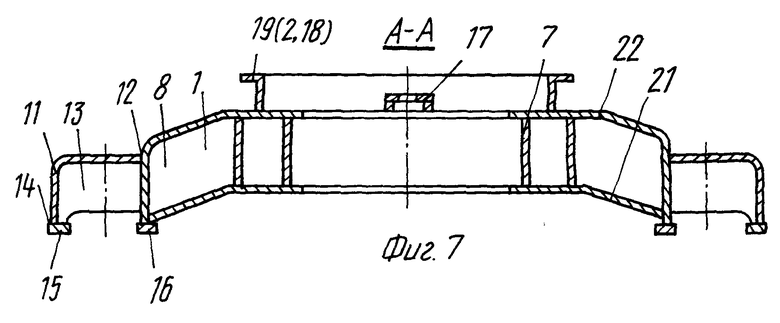
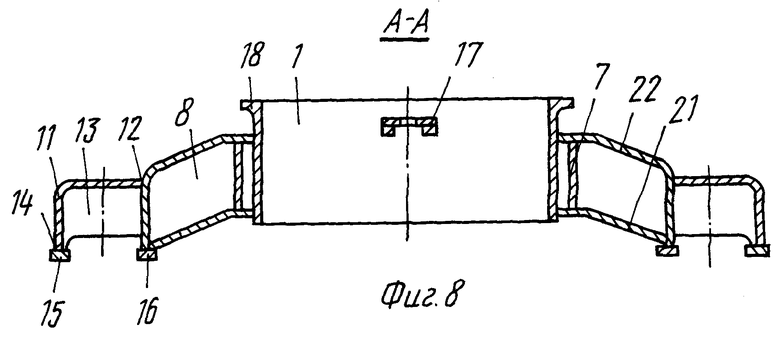
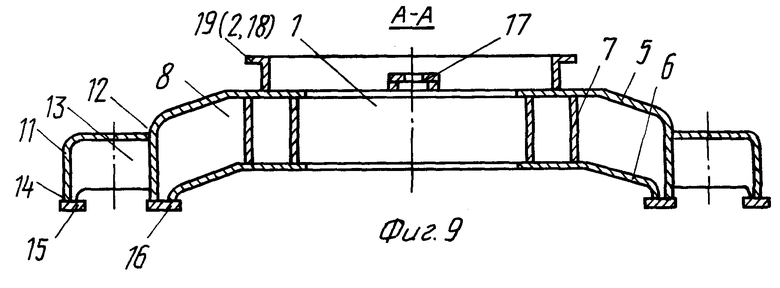
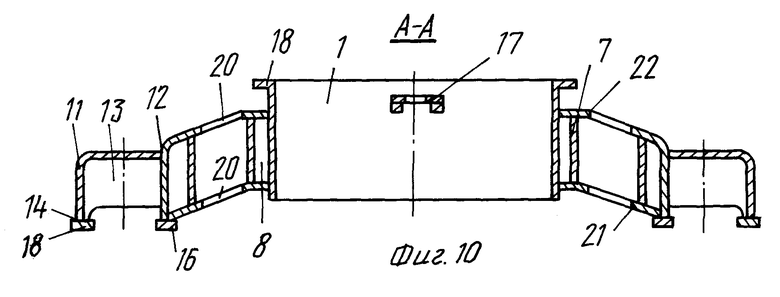
На фиг.1 изображена рама хода гусеничного экскаватора, в которой нижний лист продольными краями связан с верхним посредством промежуточного элемента, являющегося элементом крепления опорных катков, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - поперечное сечение рамы, в которой кольцевая опора связана с верхним и нижним листами; на фиг. 5 - поперечное сечение рамы, в которой кольцевая опора закреплена на верхнем листе; на фиг. 6 - поперечное сечение рамы, в которой на верхнем и нижнем листах между кольцевой опорой и Г-образными профилями выполнены окна; на фиг. 7 - поперечное сечение рамы, в которой нижний лист продольными краями связан с боковыми стенками верхнего листа, и листы выполнены без окон; на фиг. 8 - поперечное сечение рамы в которой нижний лист продольными краями связан с боковыми стенками верхнего листа, а кольцевая опора связана с верхним и нижним листами; на фиг. 9 - поперечное сечение рамы, в которой элементы для монтажа опорных катков закреплены на продольных краях верхнего листа; на фиг. 10 - поперечное сечение рамы на фиг. 8, в которой на верхнем и нижнем листах между кольцевой опорой и Г-образным профилем выполнены окна.
Рама хода гусеничного экскаватора на фиг. 1, 2, 3 содержит среднюю часть 1, на которую установлена кольцевая опора 2, для крепления опорно-поворотного устройства (на чертеже не показано), элементы 3 для установки приводных механизмов и элементы 4 для установки натяжных механизмов правой и левой гусеничных лент. Элементы 3 и 4 могут быть приварены к торцам или быть выполнены заодно с рамой.
Средняя часть 1 рамы хода образована верхним 5 и нижним 6 изогнутыми листами, имеющими форму в поперечном сечении в виде арки и соединенными продольными 7 и поперечными 8 ребрами, образуя балки 9 и 10 для обеспечения жесткости конструкции. На боковых стенках верхнего изогнутого листа 5 закреплены Г-образные профили 11 своими продольными краями 12 и ребрами 13. На продольных краях Г-образных профилей 11 установлены элементы 15 (в виде полос) для крепления опорных катков. Второй элемент 16 (в виде полосы), для крепления опорных катков установлен на верхнем 5 и нижнем 6 изогнутых листах, при этом одновременно является промежуточным элементом соединения верхнего 5 и продольных краев нижнего 6 листов. Перемычка 17 предназначена для установки на ней центрального коллектора (на чертеже не показан).
На фиг. 4 - 10 изображены различные исполнения рам с Г-образными профилями 11, которые своими продольными краями боковых торцев и посредством ребер прикреплены к боковым стенкам верхнего листа.
На фиг. 4 показана рама, которая содержит те же элементы, что и рама на фиг. 1, 2, 3, но кольцевая опора 18 связана с верхним 5 и нижним 6 листами (иллюстрация к п. 3 формулы);
на фиг. 5 - рама, которая содержит те же элементы, что и рама на фиг. 1, 2, 3, но кольцевая опора 19 закреплена на верхнем листе 5 (иллюстрация к п. 4 формулы);
на фиг. 6 - рама, которая содержит те же элементы, что и рама на фиг. 1, 2, 3, а также фиг. 4, 5, но на верхнем 5 и нижнем 6 листах между кольцевой опорой 2 и Г-образными профилями 11 выполнены окна 20 (иллюстрация к п. 5 формулы);
на фиг. 7 - рама, которая содержит те же элементы, что и рама на фиг. 1, 2, 3, но нижний лист 21 связан своими продольными краями с боковыми стенками верхнего листа 22, при этом листы выполнены без окон (иллюстрация к п. 6 формулы);
на фиг. 8 - рама, которая содержит те же элементы, что и рама на фиг. 1, 2, 3, но нижний лист 21 связан своими продольными краями с боковыми стенками верхнего листа 22, а кольцевая опора 18 закреплена на верхнем 22 и нижнем 21 листах (иллюстрация к п. 7 формулы);
на фиг. 9 - рама, которая содержит те же элементы, что и рама на фиг. 1, 2, 3, а также на фиг. 4 - 8, но элементы 16 для монтажа опорных катков закреплены на продольных краях верхнего листа (иллюстрация к п. 8 формулы);
на фиг. 10 - рама, которая содержит те же элементы, что и рама на фиг. 8, но на верхнем 22 и нижнем 21 листах между кольцевой опорой 18 и Г-образными профилями выполнены окна 20 (иллюстрация к п. 9 формулы).
Рама хода гусеничного экскаватора работает следующим образом.
Рама хода является базовым элементом гусеничной тележки и определяет опорный контур экскаватора. Она предназначена для монтажа на ней элементов механизма перемещения экскаватора (поддерживающие и опорные катки, привод хода, гусеничная лента) элементов, обеспечивающих работоспособность механизма перемещения (механизм натяжения гусеничной ленты), элементов для подвода энергии на привод (центральный коллектор и трубопроводы или провода), а также опорно-поворотного устройства (ОПУ,) на которое устанавливается поворотная платформа экскаватора. Рама хода экскаватора постоянно подвержена действию статических нагрузок от массы поворотной платформы с расположенными на ней механизмами, силовым оборудованием и сменным рабочим оборудованием. В процессе работы экскаватора рама воспринимает и передает через опорные катки на грунт, кроме статических нагрузок от массы поворотной платформы, также значительные знакопеременные с большой цикличностью нагрузки. Эти нагрузки возникают от усилия копания, а также от усилий подъема нагруженного ковша и силы инерции от массы поворотной платформы, рабочего оборудования и грунта в ковше. При работе экскаватора нагрузка от платформы передается через опорно-поворотное устройство на кольцевую опору 2. От кольцевой опоры нагрузки передаются на продольные 9 и поперечные 10 балки. Эти нагрузки перераспределяются между элементами, образующими балки, - верхним 5 и нижним 6 листами, продольными 7 и поперечными 8 ребрами. Далее через элементы 11, 15 и 16 нагрузки передаются на опорные катки, гусеничную ленту и грунт.
Источники информации
Авторское свидетельство N 1709035 от 10.10.88 г. (Бюл. N 4, 30.01.92)
Патент N 1838522 (заявка N 5009703 от 03.07.91 г.).
| название | год | авторы | номер документа |
|---|---|---|---|
| РАМА ХОДА ГУСЕНИЧНОГО ЭКСКАВАТОРА | 1994 |
|
RU2084591C1 |
| Рама хода гусеничного экскаватора | 1991 |
|
SU1838522A3 |
| РАМА ХОДА ЭКСКАВАТОРА | 1995 |
|
RU2099476C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР-ПОГРУЗЧИК | 1993 |
|
RU2072017C1 |
| УПЛОТНЕНИЕ С ФИКСАЦИЕЙ НЕНАГРУЖЕННЫХ ЭЛЕМЕНТОВ | 1993 |
|
RU2074332C1 |
| ТЕЛЕЖКА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ С БОРТОВЫМ СПОСОБОМ ПОВОРОТА | 1993 |
|
RU2121447C1 |
| УСТРОЙСТВО СТОПОРЕНИЯ ПОВОРОТНОЙ ПЛАТФОРМЫ ЗЕМЛЕРОЙНЫХ МАШИН | 1995 |
|
RU2114257C1 |
| Тележка гусеничного хода экскаватора | 1991 |
|
SU1838521A3 |
| ПОВОРОТНАЯ ПЛАТФОРМА ЭКСКАВАТОРА | 1992 |
|
RU2019647C1 |
| Рама хода гусеничного экскаватора | 1990 |
|
SU1773982A1 |
Изобретение относится к землеройным машинам, а именно к экскаваторам на гусеничном ходу. Рама хода гусеничного экскаватора включает кольцевую опору для крепления поворотной опоры, верхний и нижние листы, выполненные в поперечном сечении в виде арки, соединенные ребрами и посредством того, что нижний лист своими продольными краями связан с верхним листом, элементы для монтажа приводного и натяжного механизмов гусеничной ходовой части и элементы для монтажа опорных катков, которые с одной стороны закреплены на упомянутых листах, а с другой - на Г-образных профилях, которые своими продольными краями боковых торцев и посредством ребер прикреплены к боковым стенкам верхнего листа. Нижний лист своими продольными краями соединен с верхним листом посредством промежуточного элемента, являющегося элементом для крепления опорных катков. Снижается трудоемкость соединения нижнего и верхнего листов рамы хода. 8 з.п. ф-лы, 10 ил.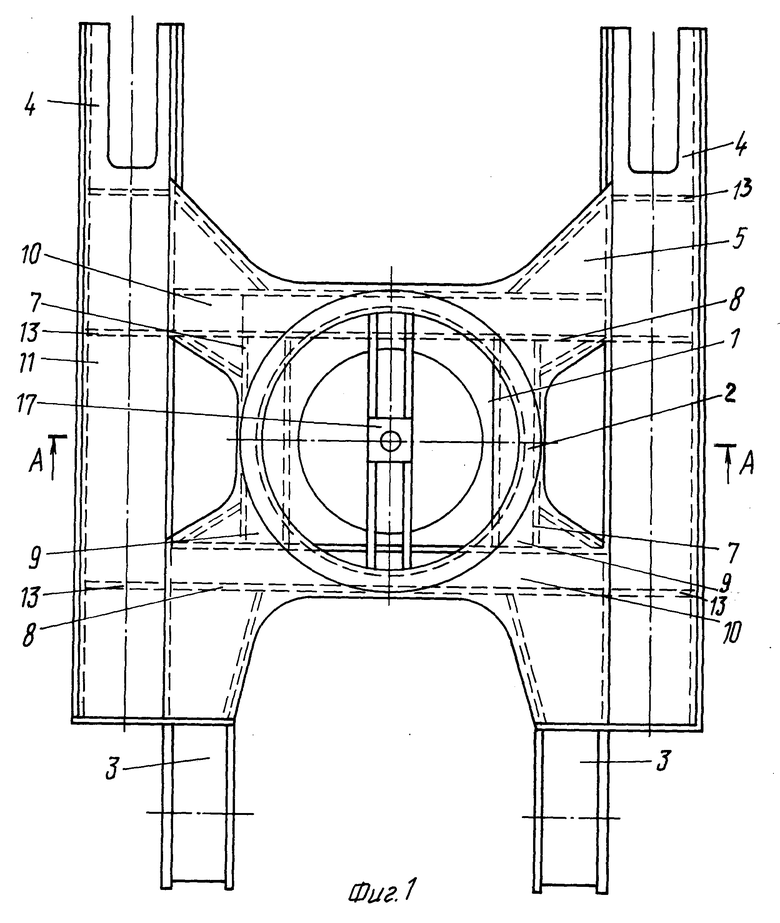
| Рама хода гусеничного экскаватора | 1991 |
|
SU1838522A3 |
| Рама хода гусеничного экскаватора | 1988 |
|
SU1709035A1 |
| Рама хода гусеничного экскаватора | 1990 |
|
SU1773982A1 |
