Изобретение относится к управлению самоходных колесных землеройно-транспортных машин, конкретно к управлению тележек землеройно-транспортных машин с бортовым способом поворота.
Известно, что изменение направления движения колесных машин может осуществляться путем принудительного поворота управляемых колес или осей. Способ поворота с помощью управляемых осей включает все разновидности сочленения элементов рам. Данный способ поворота включает и поворот шарнирно-сочлененных тележек, способных принудительно поворачиваться относительно друг друга посредством привода (См. Хархута Н.Я., Капустин М.И. и др. "Дорожные машины". Теория, конструкция и расчет., Л., "Машиностроение", 1976, стр.49, рис.22; стр.50, рис.23).
Основным недостатком способов поворота машин путем поворота управляемых колес и осей является сложность конструкции привода управления.
Известен также способ поворота за счет принудительного изменения скорости вращения движителей левого и правого борта. Такой поворот называют бортовым. При равных скоростях вращения левых и правых движителей машина движется прямолинейно. При разности скоростей вращения правых и левых движителей происходит забегание движителей с большей скоростью вращения относительно движителей (колес) с меньшей скоростью или заторможенных, что и поворачивает машину. Тем же способом поворачивают гусеничные машины (См. Васильев А.А. "Дорожные машины", М., "Машиностроение", 1987., стр.189, рис.4,9).
Машины с бортовым способом поворота при простоте управления отличаются повышенным износом шин в результате юза колес при повороте (в боковом направлении и по ходу). Поэтому бортовой способ поворота для колесных машин применяют исключительно на малогабаритных машинах небольшой мощности и массы с короткой базой, равной или меньше колеи машины, а также на гусеничных машинах.
Цель изобретения: получать конструкцию ходовой тележки, способной поворачиваться без юза колес с простым управлением (отсутствием дополнительного привода управления колесами), т.е. сочетающую в себе достоинство известных способов поворота с помощью управляемых колес или осей и бортовой поворот.
Указанная цель достигается тем, что тележка землеройно-транспортной машины с бортовым способом поворота, который осуществляется при достижении разности скоростей вращения левых и правых движителей за счет принудительного изменения, содержащая раму и колесные двигатели с отдельным приводом на каждый борт, выполнена с шарнирным сочленением для ее поворота за счет изменения скорости вращения колесных движителей на каждом борту.
Частным случаем является тележка землеройно-транспортной машины с бортовым способом поворота, содержащая раму, выполненную шарнирно-сочлененной из двух или более рам с шарнирными сочленениями между ними, а колесные движители жестко установлены на рамах.
Другим частным случаем является тележка землеройно-транспортной машины с бортовым способом поворота, в которой колесные движители жестко установлены на мостах, а шарнирные сочленения размещены между ведущими мостами и рамой.
Кроме этого, данная цель достигается, когда тележка землеройно-транспортной машины с бортовым способом поворота, в которой колесные движители установлены на раме посредством шарнирных сочленений, при этом для согласования (исключения схождения левых и правых колесных движителей) левый и правый колесные движители связаны рулевой трапецией. Если шарнирное сочленение находится на продольной оси симметрии колеса, то рулевая трапеция не обязательна.
Отдельный привод на каждый борт может быть выполнен с помощью механических передач или гидравлическим приводом (электрическим). При исполнении колесных движителей с отдельными приводами от гидромоторов, которые подключены к 2-поточной гидросистеме, питающей каждый борт от одного отдельного потока, не требуется дополнительных устройств, предназначенных для уменьшения юза и пробуксовки колес во время поворота (это такие, как бортовой дифференциальный механизм между колесными движителями одного борта). При повороте машины гидропривод автоматически согласует скорости вращения передних и задних колесных движителей по борту.
Частным случаем исполнения шарнирного сочленения рам может служить шариковая или роликовая поворотная опора (например, роликовое опорно-поворотное устройство ТУ - 22-008-141-90), которая несет большие радиальные и осевые нагрузки.
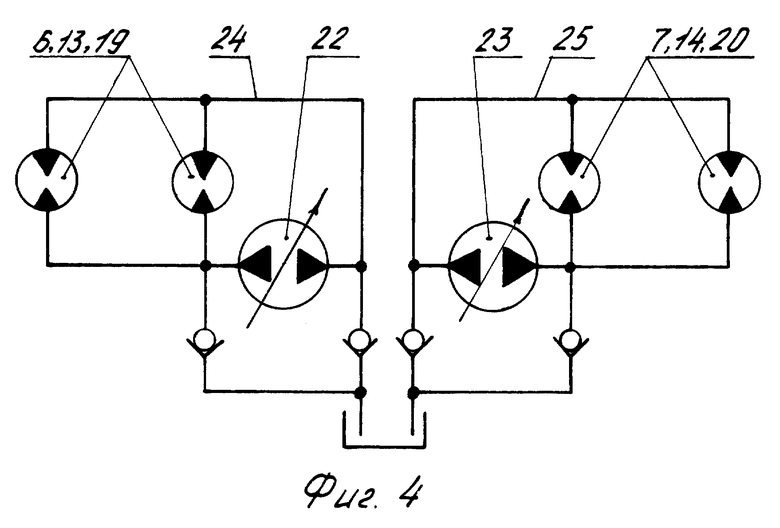
Сущность изобретения поясняется чертежами. На фиг.1 изображена схема тележки землеройно-транспортной машины с бортовым способом поворота - с двумя рамами с шарнирным сочленением между ними; на фиг.2 - схема тележки землеройно-транспортной машины с бортовым способом поворота, в которой шарнирные сочленения размещены между ведущими мостами и рамой; на фиг.3 - схема тележки, в которой колесные движители установлены на раме посредством шарнирных сочленений; на фиг. 4 - принципиальная гидравлическая 2- поточная схема подключения приводов колесных движителей тележки с бортовым способом поворота и 4-колесными движителями; на фиг.5 - пример схемы поворота тележки, содержащей раму, выполненную из двух рам с шарнирным сочленением между ними.
Тележка землеройно-транспортной машины с бортовым способом поворота, содержащая раму, выполненную из двух рам с шарнирным сочленением между ними, фиг. 1, содержит две или более рамы 1, 2, которые связаны между собой посредством шарнирного сочленения 3. На рамы 1, 2 жестко установлены колесные движители 4, которые приводятся во вращение отдельными приводами 5 от гидромоторов левого 6 и правого 7 рядов.
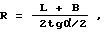
Тележка с бортовым способом поворота, в которой колесные движители жестко установлены на мостах, а шарнирные сочленения размещены между мостами и рамой, фиг.2, содержит единую раму 8, с которой связаны мосты 9 посредством шарнирного сочленения 10, на мосты 9 жестко установлены колесные движители 11. Колесные движители 11 приводятся во вращение отдельными приводами 12 от гидромоторов левого 13 и правого 14 рядов.
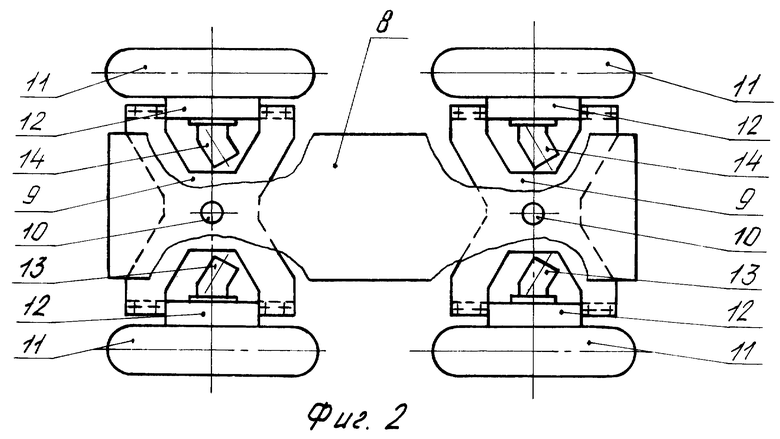
Тележка с бортовым способом поворота, в которой колесные движители установлены на раме посредством шарнирных сочленений, фиг.3, содержит единую раму 15, с которой связаны движители 16 посредством шарнирного сочленения 17. Колесные движители 16 приводятся во вращение отдельными приводами 18 от гидромоторов левого 19 и правого 20 рядов.
Для исключения схождения левых и правых колес (для согласования) установлены рулевые трапеции 21, которые связывают левое и правое колеса.
Принципиальная гидравлическая схема подключения приводов колесных движителей, фиг.4, содержит два регулируемых гидравлических насоса 22, 23, работающих на каждый поток отдельно. Каждый поток подключен гидролиниями 24, 25 соответственно к левому 6, 13, 19 и правому 7, 14, 20 рядами гидромоторов.
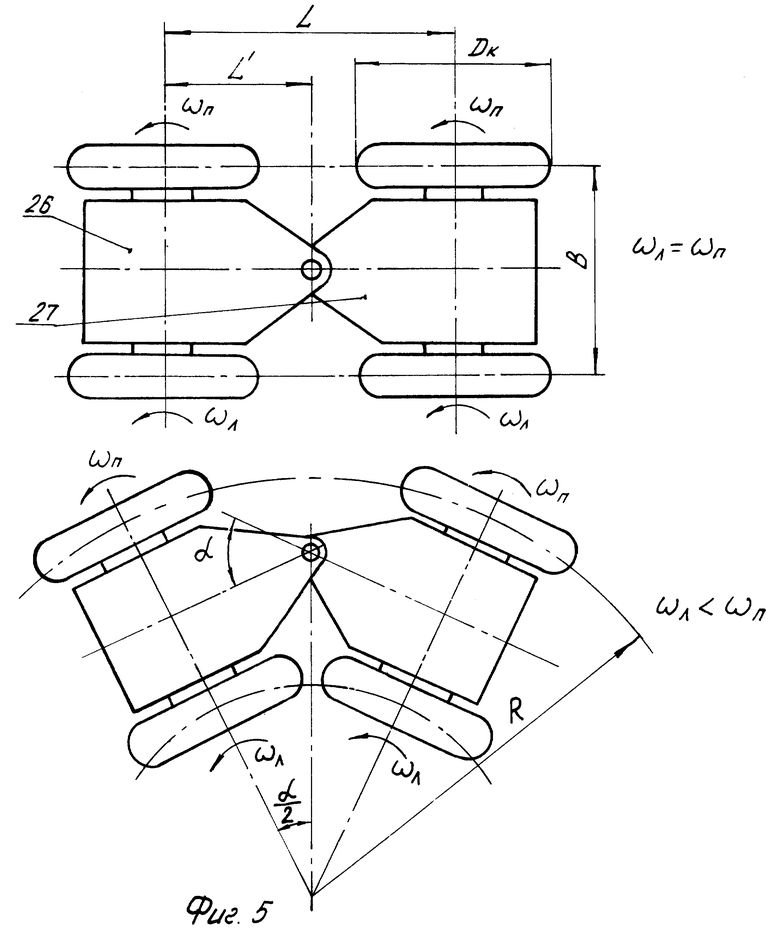
Принцип поворота поясняется схемой поворота тележки, содержащей раму, выполненную из двух рам 26, 27 с шарнирами сочленением между ними, фиг.5.
При равных скоростях вращения левых и правых колесных движителей, которые приводятся во вращение гидромоторами соответственно левого 6, 13, 19 и правого 7, 14, 20 рядов, машина движется прямолинейно. При изменении подачи насоса, питающего один из бортов, путем изменения сигнала управления насосом скорость вращения колесных движителей по этому борту становится больше или меньше, чем на противоположном борту.
Например, если скорость вращения левых колес ωл, правых ωп, при этом ωл < ωп, то происходит складывание рам на угол α и поворот машины влево радиусом R, при этом бокового юза нет, как при бортовом способе поворота машины с цельной рамой (см. прототип). Если ωп > ωл, то происходит поворот машины вправо. При L'=L/2 угол α и радиус R определяются по формуле
где
L - база машины;
B - колея машины;
Dк - диаметр колеса;
R - радиус поворота;
α - угол складывания тележек;
ωп - скорость вращения правых колес;
ωл - скорость вращения левых колес.
При повороте налево, чтобы тележка сложилась на угол α, на правом борту задние колеса по ходу движения должны отставать от передних из-за увеличения расстояния между ними, а на левом борту задние колеса по ходу движения должны догонять передние из-за уменьшения расстояние между ними. В следствие этого на тележках с механическим приводом на каждом борту необходимо устанавливать дифференциальный механизм между передними и задними колесами одного борта. Если нет такого дифференциального механизма, во время поворота (складывания рамы), например, налево правое переднее и левое заднее колеса будут перемещаться по ходу движения юзом, а правое заднее и левое переднее колеса будут пробуксовывать по ходу движения.
При исполнении колесных движителей с отдельным приводом от гидромоторов, которые подключены к 2-поточной гидросистеме, питающей каждый борт от одного отдельного потока, фиг.4, гидравлика автоматически согласует скорости вращения передних и задних ведущих колес по борту. Например, при повороте налево правое переднее колесо будет иметь скорость чуть больше, чем правое заднее, а левое заднее чуть больше чем левое переднее, поэтому юза и пробуксовки колес (по ходу) не будет.
Таким образом, выполнение тележки землеройно-транспортной машины с бортовым способом поворота согласно вышеописанным конструкциям позволяет получить конструкцию ходовой тележки, способной поворачиваться без юза колес и с простыми управлением, т.е. сочетающую в себе достоинство известных способов поворота с помощью управляемых колес или осей и бортовой способ поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР-ПОГРУЗЧИК | 1993 |
|
RU2072017C1 |
| РАМА ХОДА ГУСЕНИЧНОГО ЭКСКАВАТОРА | 1993 |
|
RU2129194C1 |
| РАМА ХОДА ГУСЕНИЧНОГО ЭКСКАВАТОРА | 1994 |
|
RU2084591C1 |
| УПЛОТНЕНИЕ С ФИКСАЦИЕЙ НЕНАГРУЖЕННЫХ ЭЛЕМЕНТОВ | 1993 |
|
RU2074332C1 |
| РАМА ХОДА ЭКСКАВАТОРА | 1995 |
|
RU2099476C1 |
| УСТРОЙСТВО СТОПОРЕНИЯ ПОВОРОТНОЙ ПЛАТФОРМЫ ЗЕМЛЕРОЙНЫХ МАШИН | 1995 |
|
RU2114257C1 |
| Плавающий снегоболотоход на шинах сверхнизкого давления с колесной формулой 8х8 с гидростатической трансмиссией и возможностью автоматического управления крутящими моментами каждого из колес | 2016 |
|
RU2652300C1 |
| Рама хода гусеничного экскаватора | 1991 |
|
SU1838522A3 |
| Импеллерное уплотнение вращающегося вала | 1991 |
|
SU1800183A1 |
| ПОВОРОТНАЯ ПЛАТФОРМА ЭКСКАВАТОРА | 1992 |
|
RU2019647C1 |
Использование: изобретение относится к управлению самоходных колесных землеройно-транспортных машин, конкретно к управлению тележек землеройно-транспортных машин с бортовым способом поворота. Цель изобретения: получить конструкцию тележки, спосо6ной поворачиваться без юза колес с простым управлением, т.е. сочетающую в себе достоинство известных способов поворота с помощью управляемых колес или осей и бортовой способ. При равных скоростях вращения левых и правых колесных движителей машина с тележкой, состоящей из двух шарнирно сочлененных рам, движется прямолинейно. При изменении скорости вращения колесных движителей одного из бортов появляется разница скоростей вращения левых и правых движителей и поэтому происходит забегание движителей с большей скоростью вращения относительно движителей с меньшей скоростью, рамы складываются на угол α, что и дает возможность поварачиваться машине без юза колее. 5 з.п.ф-лы, 5 ил.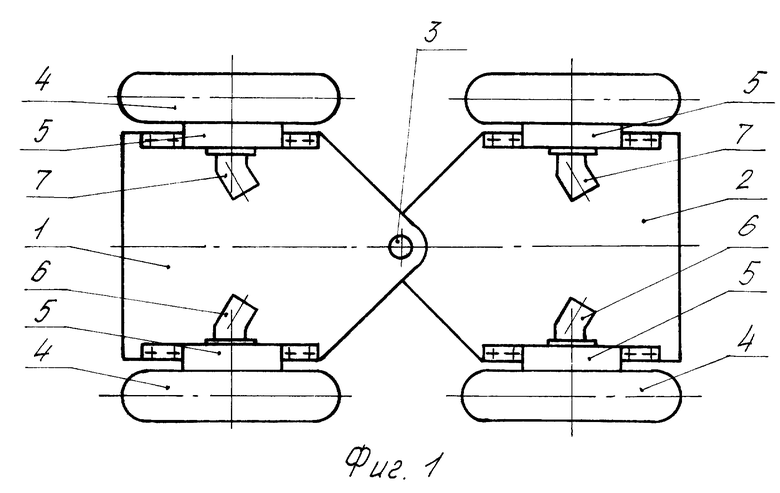
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Хархута Н.Я., Капустин М.И | |||
| и др | |||
| Дорожные машины | |||
| Теория, конструкция и расчет | |||
| - Л.: Машиностроение, 1976, с.49, рис.22, с.50, рис.23 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Васильев А.А | |||
| Дорожные машины | |||
| - М.: Машиностроение, 1987, с.189, рис.4,9. | |||
