Изобретение относится к области электромашиностроения, в частности к области электродвигателестроения, и может найти применение в электроприводах биротативного типа (в приводах двойного вращения).
Известно, что частота вращения асинхронных двигателей определяется из отношения [1]
где P - число полюсов двигателя;
v - частота питающего напряжения.
Из этой зависимости вытекает три основных способа регулирования частоты вращения асинхронного электродвигателя:
1) изменением частоты питающего напряжения;
2) изменением числа полюсов;
3) изменением величины скольжения.
Каждый из способов регулирования обладает рядом недостатков.
Так, регулирование скорости (частоты) вращения двигателя путем изменения питающей частоты (частотное регулирование) позволяет достигнуть плавного изменения скорости. Однако необходимо применять тиристорные преобразователи частоты, которые включаются между промсетью и двигателем. Это снижает КПД двигателя и применяется, в основном, в микродвигателя, для которых КПД не имеет решающего значения.
Регулирование скорости электродвигателя путем изменения числа полюсов ротора позволяет получить ступенчатое изменение частоты вращения.
Регулирование путем реостата (добавочного активного сопротивления) в цепь ротора, хотя и позволяет плавно изменять частоту вращения в широких пределах, однако ведет к большим потерям энергии в реостате, чрезвычайно "мягкой" механической характеристике двигателя при большом сопротивлении в цепи ротора. В некоторых случаях это недопустимо, т.к. небольшому изменению нагрузки соответствует существенное изменение частоты вращения.
Наиболее близким по технической сущности и достигаемому эффекту является регулируемый бесступенчатый электропривод переменного тока [1], содержащий основной электродвигатель с вращающимися ротором и статором, вспомогательный электродвигатель, механический регулятор скорости, выполненный в виде двух зубчатых редукторов и вариатора с двумя дисками и роликом между ними, кинематически связанный с управляемым по скорости вспомогательным электродвигателем, снабженным винтовой парой, причем зубчатое колесо одного редуктора установлено на статоре основного электродвигателя, зубчатое колесо другого редуктора - на роторе основного электродвигателя, шестерни указанных редукторов кинематически связаны с дисками вариатора, ролик которого кинематически соединен с винтовой парой управляемого по скорости вспомогательного электродвигателя. Бесступенчатое регулирование скорости выходного вала осуществляется без подвода дополнительной мощности за счет перераспределения скоростей между вращающимся ротором и статором.
Данное устройство выбрано за прототип.
Недостатком прототипа является низкий КПД, поскольку регулирование осуществляется заранее, что исключает гибкое, адаптивное к реальным условиям управление работой электродвигателя. Отслеживать текущие изменения условий работы двигателя в прототипе невозможно. Другим недостатком прототипа является то, что реализация требует усложнения конструкции за счет введения редукторов, вариатора, тахогенератора и др., что снижает не только КПД, но и надежность электродвигателя в целом.
Задачей, на решение которой направлено заявляемое изобретение, является устранение указанных недостатков, а именно создание гибкого, адаптивного к текущим условиям работы устройства для регулирования скорости электродвигателя, обеспечивающего снижение потерь, повышение адекватности механических параметров текущим потребностям при одновременном упрощении конструкции.
Поставленная цель достигается тем, что в электродвигателе с бесступенчатым регулированием скорости вращения, содержащем основной электродвигатель с вращающимся статором и ротором, один из валов которого соединен с нагрузкой, а другой - через передаточный механизм с вспомогательным электродвигателем, в отличие от прототипа вспомогательный механизм представляет собой неподвижный ролик, расположенный соосно с ротором основного двигателя, а вспомогательный электродвигатель установлен на тележке, снабженной приводным винтом, причем направляющая тележки параллельна валу вспомогательного двигателя.
На чертеже изображена схема заявляемого устройства.
Асинхронный электродвигатель содержит расположенные на одном валу 1 вращающийся ротор 2 и неподвижный (на подшипниках) ротор 3, статор 4, жестко закрепленный во вращающемся в подшипниках 5 корпусе 6, выходной вал 7 которого связан с нагрузкой (не показана). Вал 1 связан с соосным валом вспомогательного двигателя 8, установленного на движущейся тележке 9, снабженной приводным винтом 10.
Заявляемое устройство работает следующим образом. Вспомогательный двигатель 8 вращает ротор 2 с угловой скоростью, равной скорости вращения магнитного поля статора в ту же сторону. Режим работы нейтральный. Статор 4 неподвижен. Коэффициент скольжения равен единице. С помощью приводного винта 10 осуществляется движение вспомогательного двигателя 8 влево. Ротор 2 частично выходит из действия магнитного поля статора и его место занимает неподвижный ротор 3. При этом статор 4 начинает вращаться в сторону, противоположную вращению ротора 2, который находится в генераторном режиме, т.е. начинает вырабатывать энергию, которая поступает в статорную обмотку. Неподвижный ротор 3, являясь источником вращения статора 4, по мере увеличения площади электрического взаимодействия со статором увеличивает его момент вращения. Постепенно, по мере выхода из контакта со статором подвижного ротора 2 и замещения его неподвижным ротором 3 происходит пропорциональное изменение скорости вращения статора и жестко связанного с ним выходного вала.
Таким образом достигается решение поставленной задачи - плавное, бесступенчатое регулирование скорости вращения электропривода без усложнения конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ГЛУБИННОГО НАСОСА | 1999 |
|
RU2163311C1 |
| МНОГОСКОРОСТНОЙ БИРОТАТИВНЫЙ ПРИВОД СТАНКА-КАЧАЛКИ СО СТУПЕНЧАТЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ | 2002 |
|
RU2229622C1 |
| ПРИВОД СТАНКА-КАЧАЛКИ С КОМПЕНСАЦИЕЙ НЕРАВНОМЕРНОСТИ РАБОЧЕЙ НАГРУЗКИ | 2002 |
|
RU2229623C1 |
| Регулируемый бесступенчатый электропривод переменного тока | 1982 |
|
SU1274114A1 |
| ПРИВОД СТАНКА-КАЧАЛКИ С ПОВЫШЕННЫМ ПУСКОВЫМ МОМЕНТОМ | 2002 |
|
RU2229624C1 |
| РЕДУКТОР С БЕССТУПЕНЧАТЫМ ИЗМЕНЕНИЕМ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ | 2004 |
|
RU2253061C1 |
| РЕГУЛИРУЕМАЯ ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА | 2010 |
|
RU2445532C1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| УПРАВЛЯЕМЫЙ КАСКАДНЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД | 2009 |
|
RU2402857C1 |
| СТАНОК-КАЧАЛКА | 2021 |
|
RU2776693C1 |
Использование: в электроприводах биротативного типа. Технический результат заключается в создании гибкого, адаптивного к текущим условиям работы устройства для регулирования скорости электродвигателя, обеспечивающего снижение потерь, повышение адекватности механических параметров текущим потребностям, при одновременном упрощении конструкции. Электродвигатель содержит основной электродвигатель с вращающимся статором 4 и ротором 2, один из валов которого соединен с нагрузкой, а другой 1 через передаточный механизм - с вспомогательным электродвигателем 8. Передаточный механизм представляет собой неподвижный ротор 3, расположенный на одном валу с ротором основного двигателя. Вспомогательный электродвигатель 8 установлен на тележке 9, снабженной приводным винтом 10. Направляющая тележка параллельна валу вспомогательного двигателя. С помощью приводного винта осуществляется движение вспомогательного двигателя 8 влево. Ротор 2 частично выходит из действия магнитного поля статора 4 и его место занимает неподвижный ротор 3. Статор 4 начинает вращаться в сторону, противоположную вращению ротора 2, который находится в генераторном режиме. По мере увеличения площади их взаимодействия, увеличивается момент его вращения. 1 ил.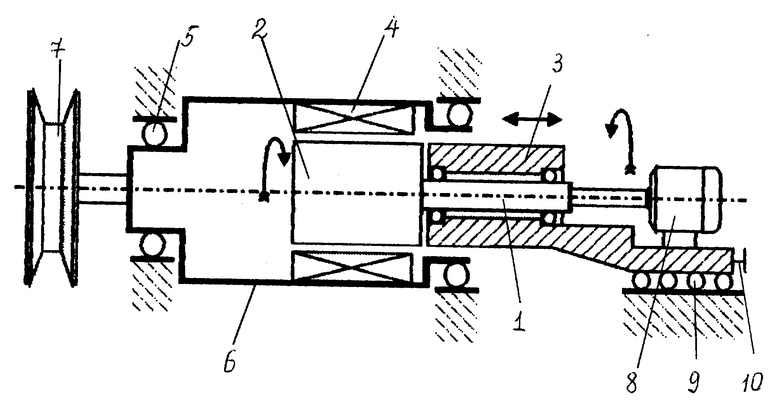
Асинхронный электродвигатель с бесступенчатым регулированием скорости вращения, содержащий основной электродвигатель с вращающимся статором и ротором, один из валов которого соединен с нагрузкой, а другой через передаточный механизм - с вспомогательным электродвигателем, отличающийся тем, что передаточный механизм представляет собой неподвижный ротор, расположенный соосно с ротором основного двигателя, а вспомогательный электродвигатель установлен на тележке, снабженной приводным винтом, причем направляющая тележки параллельна валу вспомогательного двигателя.
| SU, 1274114 A1, 30.11.86 | |||
| GB, 1173123 A, 03.12.69 | |||
| GB, 999724 A,10.06.65 | |||
| SU, 71428 A, 07.01.59 | |||
| RU, 2050672 C1, 20.12.95 | |||
| EP, 0196649 A2, 08.10.86. |
