Изобретение относится в космической технике и может быть использовано в космических аппаратах, стабилизируемых вращением.
Известен космический аппарат со стабилизацией вращением, содержащий корпус аппарата с закрепленным на нем солнечными батареями, параболическими и рупорными антеннами [1].
Недостатком указанного космического аппарата является необходимость регулирования скорости вращения и коррекции направления продольной оси аппарата вследствие того, что при длительном времени работы величина и направление вектора кинетического момента, а следовательно, и скорость вращения аппарата значительно изменяется под действием различных возмущающих факторов (возмущение от светового давления солнечных лучей, гравитационных полей, движущихся масс внутри аппарата, неточностей в изготовлении системы ориентации и стабилизации).
Известен также космический аппарат со стабилизацией вращением, содержащий корпус аппарата, развертываемые солнечные батареи, размещенные симметрично относительно оси максимального момента инерции аппарата и снабженные токосборными силовыми контурами, объединенными с группами последовательно соединенных фотоэлектрических преобразователей батарей, а также подключенными к токосборным контурам экранированными от внешнего магнитного поля токонесущими проводами, при этом токосборные силовые контуры и фотоэлектрические преобразователи объединены с обеспечением согласного направления их токов относительно корпуса аппарата [2].
Недостатком указанного космического аппарата является необходимость регулирования скорости собственного вращения аппарата при превышении ее оптимального значения, особенно при работе батарей в режимах перегрузок либо короткого замыкания, когда момент силы Ампера, приложенной к аппарату в результате взаимодействия токов солнечных батарей с магнитным полем Земли, будет значительно превышать действие тормозящих факторов.
Поддерживание постоянной по величине угловой скорости вращения имеет существенное значение, т.к. вследствие затухания собственного вращения аппарат становится менее устойчивым по отношению к одним и тем же внешним возмущающим моментам [3], а при превышении ее оптимального значения возникает необходимость усиления элементов механических узлов развертываемых конструкций вследствие возможности их деформации [4], усложняется управление ориентацией антенных полей [5].
Известно также использование в космической технике датчиков угловых скоростей вращения относительно выбранной оси [6], в солнечных батареях добавочных резисторов (величиной десятые доли - единицы Ом), подключаемых к токонесущим проводам для съема экспериментальной информации о работе батарей [7].
Целью предлагаемого решения является обеспечение поддержания угловой скорости собственного вращения аппарата в заданных пределах путем управления компенсирующим на влияние возмущающих факторов воздействием, являющимся результатом взаимодействия токов солнечных батарей и магнитного поля Земли.
Поставленная цель достигается тем, что космический аппарат, содержащий корпус, развертываемые солнечные батареи, размещенные симметрично относительно оси максимального момента инерции аппарата и снабженные токосборными силовыми контурами, объединенными с группами последовательно соединенных фотоэлектрических преобразователей батарей с обеспечением согласного направления их токов относительно корпуса аппарата, экранированными от внешнего магнитного поля токонесущими проводами, подключенными к токосборным контурам, неэкранированными токонесущими проводами, подключенными параллельно экранированным токонесущим проводам, снабжен датчиком угловой скорости относительно оси вращения аппарата, а указанные экранированные токонесущие провода подключены к токосборным контурам посредством резисторов, при этом указанные неэкранированные токонесущие провода подключены к токосборным силовым контурам посредством вентилей, управляющие входы которых имеют связь с выходом указанного датчика угловой скорости.
На фиг. 1 представлен чертеж предлагаемого космического аппарата, состоящего из корпуса 1, датчика 2 угловой скорости относительно оси вращения, развертываемых солнечных батарей 3, размещенных симметрично относительно оси максимального момента инерции аппарата и снабженных токосборными силовыми контурами 4, объединенными с группами последовательно соединенных фотоэлектрических преобразователей 5 батарей 3 с обеспечением согласного направления их токов относительно корпуса 1 аппарат, экранированными от внешнего магнитного поля токонесущими проводами 6, подключенными к токосборным контурам 4 посредством резисторов 7, при этом параллельно экранированным токонесущим проводам 6 к токосборным силовым контурам 4 подключены неэкранированные токонесущие провода 8 посредством вентилей 9, управляющие входы которых имеют связь с выходом датчика 2 угловой скорости.
При движении космического аппарата со стабилизацией вращением на орбите искусственного спутника Земли, с учетом того, что аппараты указанного вида используются на круговой орбите с наклонением 0...3o и их ось вращения из соображения устойчивости движения ориентируется перпендикулярно плоскости орбиты [3] , магнитное поле Земли по закону Ампера будет воздействовать на его солнечные батареи, в которых токи в группах последовательно соединенных фотоэлектрических преобразователей и в токосборных силовых контурах, объединяющих группы фотоэлектрических преобразователей, имеют согласное направление относительно корпуса аппарата, а параллельно соединенные экранированные и неэкранированные токонесущие провода подключены к токосборным контурам соответственно через резисторы и вентили, причем управляющие входы вентилей имеют связь с выходом датчика угловой скорости, с силой  равной:
равной:
или
где Ji - ток, протекающий в i-й батарее;
li- длина i-й солнечной батареи;
B - индукция магнитного поля Земли;
K - соотношение токов, протекающих соответственно через вентиль в неэкранированном токонесущем проводе и солнечной батарее,
т. к. направление токов в фотопреобразователях батареи и в неэкранированном токонесущем проводе противоположно, а величина параметра K лежит в пределах O ≤ K ≤ 1
Выбором равновеликих по величине длин и токов солнечных батарей (li = lk = l; Ji = Jk = J) обеспечивается равенство сил (Fi = Fk = F), действующих на батареи, а момент силы Ампера, приложенной к аппарату, будет равным
M = nFl = nJl2B(1-k),
где n - количество развертываемых солнечных батарей,
а величина ε углового ускорения аппарата, создаваемого взаимодействием магнитного поля Земли и токов развертываемых солнечных батарей, по второму закону Ньютона для вращающихся тел составит:
где J момент инерции аппарата.
Обеспечив по сигналам с датчика угловой скорости запирание вентилей при условии ω ≤ ω0 где ω и ω0 - соответственно угловые скорости вращения текущая и номинальная, тем самым будет достигнуто прохождение тока только по экранированным токонесущим проводам и обеспечится достижение углового ускорения относительно оси вращения величины:
При превышении текущей угловой скорости вращения аппарата номинального значения (ω ≥ ω0+Δω), где Δω - порог чувствительности срабатывания датчика угловой скорости) по сигналу с датчика угловой скорости будут отпираться вентили. Благодаря подключению экранированных токонесущих проводов к токосборным контурам через резисторы, токи в параллельном соединении цепей экранированного и неэкранированного проводов пойдут практически через последнего, исходя из условия Rвн.откр.<< R, где Rвн.откр - сопротивление открытого вентиля; R - сопротивление резистора. Тем самым обеспечится величина момента силы Ампера, приложенной к аппарату и углового ускорения практически равные нулю.
В качестве вентилей могут быть использованы полупроводниковые ключи (тиристорные, транзисторные и т.д.) либо управляемые переменные резисторы.
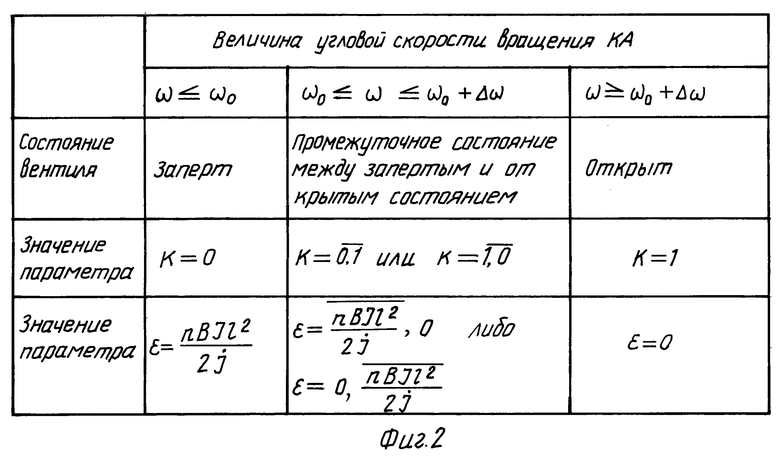
На фиг. 2 представлена таблица соответствия возможных управляющих сигналов датчика угловой скорости на вентиль и реакции последнего в цепи < токосборный контур - неэкранированный токонесущий провод > в зависимости от величины угловой скорости относительно оси вращения аппарата.
Отслеживание заданной угловой скорости вращения аппарата с достижением эффекта ω0 ≤ ω ≤ ω0+Δω возможно при работе вентиля как в ключевом, так и в аналоговом режимах.
Таким образом, по сравнению с прототипом, применение данного технического решения позволит обеспечить поддержание угловой скорости собственного вращения космического аппарата в заданных пределах вне зависимости от величины токов, протекающих в солнечных батареях.
Источники информации
1. Современное состояние и перспективы развития космического вооружения США. - Л.: ВИКИ им А.Ф. Можайского, 1986, с. 91- 93.
2. Заявка 93057506/11, 20.10.95.
3. Попов В. Системы ориентации и стабилизации космических аппаратов. - М.: Машиностроение, 1986, с. 17-41.
4. Грилихес В. и др. Солнечная энергия и космические полеты. - М.: Наука, 1984, с. 131-140.
5. Зарубежные космические средства / Справочник. - М.: МО, с. 205-206. УДК 629.78 (104).
6. Селезнев В. Навигационные устройства. - М.: Машиностроение, 1974, с. 559.
7. Колтун М. Солнечные элементы. - М.: Наука, 1987, с. 98-104.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМИЧЕСКИЙ АППАРАТ СО СТАБИЛИЗАЦИЕЙ ВРАЩЕНИЕМ | 1993 |
|
RU2088494C1 |
| КОСМИЧЕСКИЙ АППАРАТ СО СТАБИЛИЗАЦИЕЙ ВРАЩЕНИЕМ | 1997 |
|
RU2136550C1 |
| КОСМИЧЕСКИЙ АППАРАТ СО СТАБИЛИЗАЦИЕЙ ВРАЩЕНИЕМ | 2011 |
|
RU2481246C1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ИНЕРЦИОННЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070148C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| БИНАРНЫЙ МАЛОРАЗМЕРНЫЙ КОСМИЧЕСКИЙ АППАРАТ С РЕКОНФИГУРИРУЕМОЙ АНТЕННОЙ, СОВМЕЩЕННОЙ С ГИБКОЙ РАЗВЕРТЫВАЕМОЙ ЛЕНТОЧНОЙ СОЛНЕЧНОЙ БАТАРЕЕЙ | 2019 |
|
RU2716728C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| БИНАРНЫЙ КОСМИЧЕСКИЙ АППАРАТ С РЕКОНФИГУРИРУЕМОЙ АНТЕННОЙ, СОВМЕЩЕННОЙ С ГИБКОЙ ЛЕНТОЧНОЙ СОЛНЕЧНОЙ БАТАРЕЕЙ, РАЗВЕРТЫВАЕМОЙ МУЛЬТИВЕКТОРНЫМИ МАТРИЧНЫМИ РАКЕТНЫМИ ДВИГАТЕЛЯМИ | 2019 |
|
RU2714064C1 |
| СПОСОБ КОНТРОЛЯ ПРОИЗВОДИТЕЛЬНОСТИ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА С ИНЕРЦИОННЫМИ ИСПОЛНИТЕЛЬНЫМИ ОРГАНАМИ | 2016 |
|
RU2653891C2 |
Изобретение относится к космической технике и может быть использовано в космических аппаратах, стабилизируемых вращением. Согласно изобретению космический аппарат содержит корпус, датчик угловой скорости относительно оси вращения аппарата, солнечные батареи, размещенные симметрично относительно этой оси и снабженные токосборными силовыми контурами. Контуры объединены с группами последовательно соединенных фотоэлектрических преобразователей батарей с обеспечением согласного направления их токов относительно корпуса. Экранированные от внешнего магнитного поля токонесущие провода подключены к токосборным контурам посредством резисторов. Неэкранированные токонесущие провода подключены параллельно экранированным проводам и к токосборным контурам посредством вентилей. Управляющие входы вентилей связаны с выходом датчика угловой скорости. При работе обеспечивается поддержание угловой скорости вращения космического аппарата в заданных пределах в результате взаимодействия токов солнечных батарей и магнитного поля Земли. Изобретение обеспечивает поддержание угловой скорости в заданных пределах вне зависимости от величины токов в солнечных батареях. 2 ил.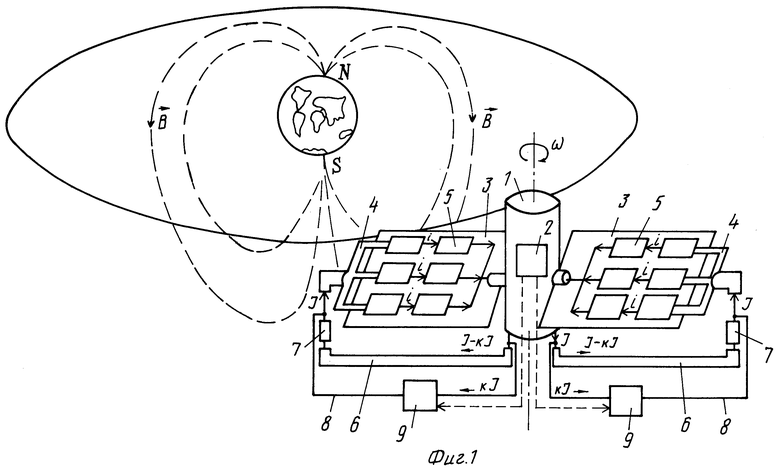
Космический аппарат со стабилизацией вращением, содержащий корпус, развертываемые солнечные батареи, размещенные симметрично относительно оси максимального момента инерции аппарата и снабженные токосборными силовыми контурами, объединенными с группами последовательно соединенных фотоэлектрических преобразователей батарей с обеспечением согласного направления их токов относительно корпуса аппарата, экранированными от внешнего магнитного поля токонесущими проводами, подключенными к токосборным силовым контурам, неэкранированными токонесущими проводами, подключенными параллельно экранированным токонесущим проводам, отличающийся тем, что он снабжен датчиком угловой скорости относительно оси вращения аппарата, а указанные экранированные токонесущие провода подключены к токосборным контурам посредством резисторов, при этом указанные неэкранированные токонесущие провода подключены к токосборным силовым контурам посредством вентилей, управляющие входы которых связаны с выходом указанного датчика угловой скорости.
| RU 93057506/28 A1, 20.10.95 | |||
| Современное состояние и перспективы развития космического вооружения США | |||
| - Л.: ВИКИ им.А.Ф.Можайского, 1986, с.91-93 | |||
| Попов В | |||
| Системы ориентации и стабилизации космических аппаратов | |||
| - М.: Машиностроение, 1986, с.17-41 | |||
| Грилихес В | |||
| и др | |||
| Солнечная энергия и космические полеты | |||
| - М.: Наука, 1984, с.131-140. |
