Назначение
Изобретение относится к способу определения градиентов силы тяжести или вторых производных потенциала силы тяжести Земли, позволяющему получать гравитационную карту Земли и уточнение модели геоида, являющихся важнейшими информационными данными, например, для изучения вулканических процессов и землетрясений, исследования океанической циркуляции, измерения динамики уровня моря и движения прибрежных льдов, обнаружения пустот и природных ресурсов в Земле и т.д.
Уровень техники
Для определения возникающих напряжений в некотором сечении твердого тела, находящемся в трехмерном пространстве гравитационного поля, используют описание тензорного поля.
По определению тензор - объект линейной алгебры, линейно преобразующий элементы одного линейного пространства в элементы другого (см. сайт: https://habr.com/ru/post/261563/).
Поле гравитационных градиентов трехмерного ортогонального пространства x, y, z в функциональном (операторном) виде описывается тензором второго ранга Tij:

где
i,j=(x,y,z);
V - скалярная величина, представляющая собой гравитационный потенциал местной системы ортогональных декартовых координат (x, y, z).
Для оценки величины нормальных и касательных напряжений в любом сечении тензор напряжения Τ в трехмерном ортогональном пространстве x, y, z представляют в матричном виде:
Приняв, что ось z направлена вертикально в землю, компоненты тензора в некоторой точке в местной системе координат (x, y, z), рассчитанные посредством определения пространственных скоростей изменения вдоль направлений x, y и z пространственной скорости изменения гравитационного потенциала в направлениях x, y и z, представляют скорости изменения гравитационного ускорения вдоль этих направлений.
Как видно из выражения (2) неоднородность гравитационного поля описывается 9-ю компонентами тензора гравитационного потенциала. Однако с учетом закона парности касательных напряжений (на двух взаимно-перпендикулярных площадках составляющие касательных напряжений, перпендикулярных общему ребру, равны и направлены обе к ребру или от ребра), а также того, что в свободном пространстве сумма нормальных напряжений σxx+σyy+σzz равна 0, используют только следующие 5 компонентов из 9-ти, которые являются независимыми между собой:

где
• σzz - вертикальный градиент (считают наиболее полезной компонентой);
• σxz, σyz - горизонтальные градиенты (например, компонента σyz представляет скорость изменения вдоль направления у гравитационного ускорения по направлению z к земле);
• σху и (σxx-σyy)/2 - параметры кривизны эквипотенциальной поверхности (определяют размеры, форму, ориентацию, а также плотность и глубину залегания геологических структур).
Известен способ обнаружения сигнала градиента силы тяжести по модуляционной схеме с использованием гравитационного градиентометра в виде детектора для обнаружения градиента силы тяжести (см. Евразийский патент №027249), содержащего по меньшей мере два сенсорных тела, каждое из которых соединено посредством соответствующего шарнира с участком корпуса и каждое испытывает изменение крутящего момента в ответ на изменение градиента силы тяжести, посредством чего по меньшей мере два сенсорных тела перемещаются относительно друг друга, при этом данный способ включает в себя следующие операции:
• определяют параметр механической реакции, связанный по меньшей мере с одним из по меньшей мере двух сенсорных тел, причем параметр механической реакции является мерой для отношения линейного ускорения к соответствующему линейному перемещению, которое прилагается по меньшей мере к одному из по меньшей мере двух сенсорных тел так, что разность между величинами крутящих моментов, испытываемых по меньшей мере двумя сенсорными телами, уменьшается, причем линейное перемещение сформировано исполнительным устройством, выполненным с возможностью преобразования линейного перемещения в угловое перемещение по меньшей мере одного сенсорного тела;
• измеряют ускорение, связанное с внешним ускорением;
• управляют исполнительным устройством с использованием системы упреждающего управления, которая выполнена так, что линейное перемещение зависит от измеренного ускорения и определенного параметра механической реакции;
• регистрируют сигнал градиента силы тяжести.
В данном способе гравитационный градиентометр выполнен для вертикального размещения относительно плоскости основания (х-у) в трехмерной координатной системе (х, у, z), с возможностью вращения вокруг оси z и ориентирован таким образом, что можно измерить компоненты Гxy и (Гxx-Гyy) у тензора градиента силы тяжести (см. компоненты выражения 3). Сенсорные тела вместе с установочным устройством вращаются вокруг оси z и с угловой частотой, которая приблизительно равна половине резонансной частоты сенсорных тел. Градиент силы тяжести приводит к возникновению силы на сенсорных телах, которые затем будут колебаться относительно установочного устройства во время этого вращения. Компоненты тензора градиента силы тяжести определяют из колебательного движения сенсорных тел относительно друг друга.
Предлагаемый способ обнаружения сигнала градиента силы тяжести используется при установке гравитационных градиентометров на подвижных объектах, в том числе и на самолетах. Однако ускорения самолетов приводят к крутящим моментам, которые гораздо больше крутящих моментов, ассоциированных с градиентом силы тяжести. Для уменьшения влияния таких ускорений самолетов используют кроме описанной платформы ("внутренней платформы") еще и "внешнюю платформу", которую соединяют с корпусом гравитационного градиентометра. "Внешнюю платформу" располагают на подвеске, содержащей пружины и демпферы, выполненные с возможностью уменьшения воздействия внешнего линейного ускорения, имеющего частоту выше нескольких Гц, например 3, 5 или 10 Гц, и выполняют с возможностью вращения с подходящей угловой частотой вокруг оси z и с возможностью ориентирования по трем ортогональным осям. Внутреннюю платформу располагают внутри корпуса гравитационного градиентометра и выполняют с возможностью точной настройки вращения вокруг оси z таким образом, чтобы дополнительно минимизировать передачу внешнего углового ускорения вокруг оси z на сенсорные тела. Обеспечивают высокую точность результирующих вращений по оси z сенсорных тел, и любые оставшиеся угловые ускорения вокруг или по осям x и y уменьшают электронно путем обработки сигнала, отражающего градиент силы тяжести.
Данный способ используют на подвижных объектах (например, на самолетах), где требуется компенсация крутящих моментов, связанных с ускорением.
Недостатком данного способа, применимого для спутниковой гравитационной градиентометрии, является то, что дополнительная компенсация значительных крутящих моментов (у спутниковой гравитационной градиентометрии она не требуется), связанных с ускорением подвижных объектов, приводят к существенным техническим сложностям и технологическим проблемам при его реализации.
Известен способ спутниковой гравитационной градиентометрии с эксплуатацией гравитационного градиентометра на космическом аппарате, представленном в описании программы Gravity Field and Steady-State Ocean Circulation Explorer (GOCE) Европейского космического агентства для глобальных исследований гравитационного поля Земли в условиях невесомости, в рамках которой разработан способ электростатической гравитационной градиентометрии (см. Приборы и методы измерений. 2016. Τ 7. №3. С 240-241; М.И. Евстифеев. Состояние разработок бортовых гравитационных градиентометров. Гироскопия и навигация. Том 24, №3 (94), 2016, стр. 105-106), который является наиболее близким к предлагаемому изобретению и взятый авторами за прототип.
Способ спутниковой гравитационной градиентометрии прототипа включает в себя следующие операции.
- Используют корпус космического аппарата (КА) вытянутой обтекаемой формы (около 5,3 м, диаметр - около 1 м, при весе КА около 1100 кг).
- Попарно на расстояние приблизительно 50 см друг от друга по осям ортогональной системы координат располагают три пары неподвижных линейных акселерометров, разработанных в Французском центре аэрокосмических исследований фирмой ONERA (фр. Office National d'Etudes et de Recherches Aerospatiales).
- Акселерометры располагают на основании из высокостабильного усиленного углеволокна (carbon/carbon), имеющего сотовую структуру, изотропность свойств по всем направлениям и низкий коэффициент теплового расширения 10-71/K.
- Основание закрепляют на специализированной равножесткой подвеске.
- Стабильность температуры основания поддерживают на уровне 10 мК в течение 200 с.
- Каждую подвижную массу в акселерометрах в состоянии невесомости удерживают вблизи заданного положения электростатическим полем с помощью цепей следящих обратных связей.
- Перемещения подвижной массы под действием внешних воздействий измеряют емкостными датчиками.
- Центр масс конструкции с акселерометрами приближают к центру масс КА для снижения влияния угловых ускорений.
- С помощью корректирующих ионных двигателей обеспечивают равномерное движение.
- Контроль движения КА осуществляют системой GSM и системами слежения с Земли.
- Обеспечивают дискретность измерений полезного сигнала 80-100 км, что соответствует времени измерения полезного сигнала около 10 с.
Недостатком прототипа является отсутствие оптимально достаточного использования рациональных решений по обеспечению точности и надежности способа гравитационной градиентометрии ввиду обоснованных исключений и компенсаций "паразитных" линейных ускорений по осям x, y, z, а также воздействий негравитационного происхождения, рационального выбора алгоритма и последовательности работы в управлении КА.
Следует отметить, что в соответствии с ГОСТ Ρ 56526-2015, надежность - это совокупность свойств, характеризующих способность КА обеспечивать в процессе функционирования получение заданного в техническом задании выходного эффекта при заданных условиях и режимах эксплуатации.
Целью предлагаемого способа спутниковой гравитационной градиентометрии является обеспечение его точности и надежности при длительной автономной эксплуатации космического аппарата в космосе.
Раскрытие изобретения
Предлагаемый способ спутниковой гравитационной градиентометрии заключается в том, что в центре масс корпуса космического аппарата вытянутой обтекаемой формы для снижения влияния угловых ускорений размещают градиентометр, в котором на каждой оси x, y, z устанавливают по паре неподвижных линейных акселерометров с заданным расстоянием между ними, которые располагают на основании из высокостабильного усиленного материала, имеющего сотовую структуру, поддерживают стабильность температуры основания и закрепляют ее на специализированной равножесткой подвеске, при этом каждую подвижную массу в акселерометрах в невесомости удерживают электростатическим полем вблизи заданного положения и ее перемещения измеряют емкостными датчиками. С помощью двигательной установки обеспечивают равномерное движение на заданной траектории, при этом параметры движения космического аппарата контролируют с помощью системы GPS или ГЛОНАСС и системами слежения с Земли; линейные ускорения по осям x, y, z измеряют градиентометрами.
Сущность изобретения заключается в том, что положение блока датчиков угловых скоростей фиксируют с высокой точностью относительно центра масс КА; элементы конструкции космического аппарата и служебные системы устанавливают максимально приближенными к равномерному распределению их масс вокруг центра масс КА; жестко закрепляют солнечные батареи на корпусе космического аппарата.
Космический аппарат ориентируют на заданной орбите с помощью блока датчиков угловой скорости, микроЭВМ, входящих в бесплатформенный инерциальный блок, систематические ошибки которого, вызванные погрешностями блока датчиков угловой скорости, ошибками интегрирования кинематического уравнения микроЭВМ и неточностями задания вектора угловой орбитальной скорости, компенсируют путем сравнения в устройствах коррекции ошибки с положением космического аппарата по блоку звездных датчиков, выполненного по избыточной схеме с резервированием, или датчикам ориентации первого типа, при этом используют бесплатформенный инерциальный блок, блок звездных датчиков и датчики ориентации первого типа без подвижных частей; управляют по сигналам микроЭВМ электромагнитной системой для создания необходимого крутящего момента, воздействующего на корпус космического аппарата для его управления.
Для описания конечного поворота космического аппарата от приборной системы координат ко второй экваториальной системе координат (инерциальной) используют математический аппарат кватернионов и параметры Родрига-Гамильтона, которые не вырождаются при любом угловом положении космического аппарата.
По нормальным и тангенциальным составляющим ускорений вектора угловой скорости вращения КА формируют сигнал коррекции линейного ускорения КА для двигательной установки.
Снижают погрешности определения ориентации космического аппарата относительно инерциальной системы координат за счет устранения систематической ошибки, связанной с изменением взаимного положения блока датчиков угловой скорости, блока звездных датчиков и блока акселерометров.
В результате получают высокую точность и надежность спутниковой гравитационной градиентометрии при длительной автономной эксплуатации КА в космосе.
Графические иллюстрации
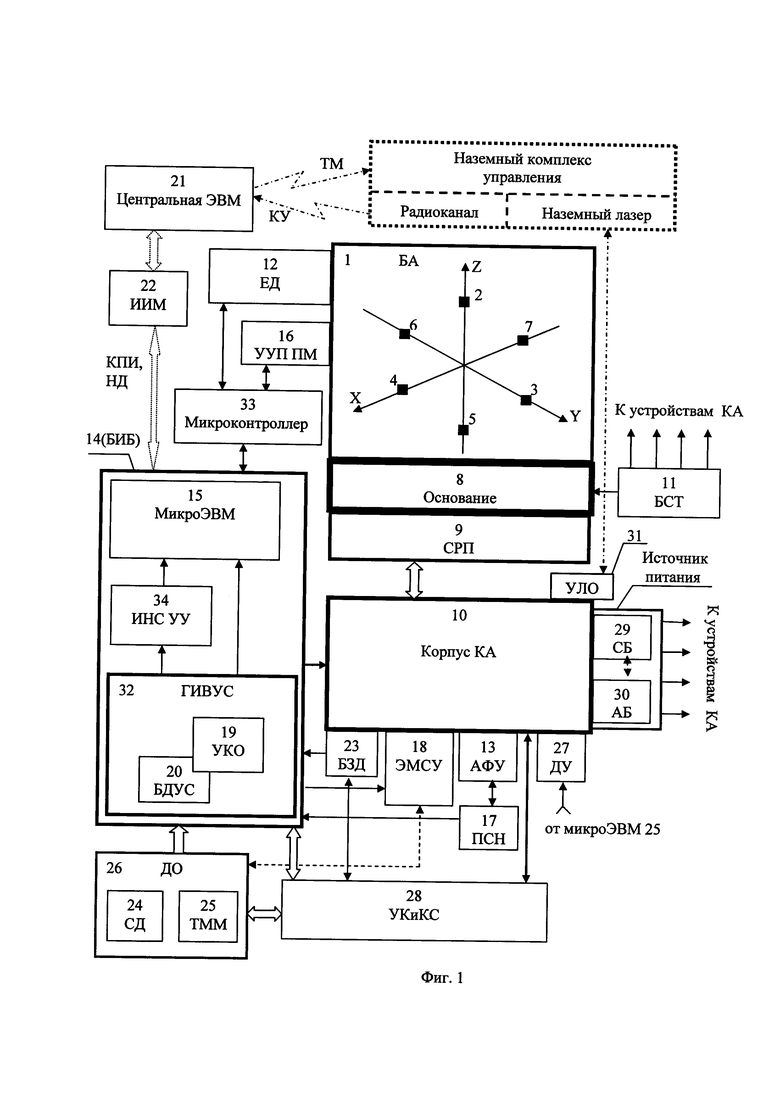
На приведенной графической иллюстрации (Фиг. 1) приведен пример реализации заявляемого способа спутниковой гравитационной градиентометрии, содержащий следующие позиции:
• Б А (блок акселерометров) - 1;
• акселерометры - (2-7);
• основание - 8;
• СРП (специализированная равножесткая подвеска) - 9;
• корпус КА-10;
• БСТ (блок системы терморегулирования) - 11;
• ЕД (емкостные датчики) - 12;
• АФУ (антенно-фидерные устройства) - 13;
• БИБ (бесплатформенный инерциальный блок) - 14;
• микроЭВМ (с контроллером БА) - 15;
• устройство удержания положения подвижных масс (УУП ПМ) - 16;
• ПСН (приемник спутниковой навигации GPS или ГЛОНАСС) - 17;
• ЭМСУ (электромагнитная система управления) - 18;
• УКО (устройство коррекции ошибки) - 19;
• БДУС (блок датчиков угловых скоростей) - 20;
• БЗД (блок звездных датчиков) - 23;
• центральная ЭВМ - 21;
• ИИМ (информационный интерфейсный модуль) - 22;
• СД (солнечный датчик) - 24;
• ТММ (трехмерный магнитометр) - 25;
• ДО (датчики ориентации) - 26;
• ДУ (двигательная установка) - 27;
• УКиКС (устройство контроля взаимного положения и компенсации "смещений") - 28;
• СБ (солнечная батарея) - 29;
• АБ (аккумуляторная батарея) - 30;
• УЛО (уголковый лазерный отражатель) - 31;
• ГИВУС (гироскопический измеритель вектора угловой скорости КА) - 32;
• Микроконтроллер - 33;
• ИНС УУ (измеритель нормальных составляющих угловых ускорений) - 34.
Телеметрическую информацию, в том числе и результаты измерений спутникового гравитационного градиентометра, передают из центральной ЭВМ 21 в наземный комплекс управления по каналу телеметрии (ТМ), а из наземного комплекса управления в центральную ЭВМ 21 - информацию команд управления (КУ).
В микроЭВМ 15 через информационный интерфейсный модуль ИИМ 22 с Центральной ЭВМ 21 поступают командно-программная информация (КПИ), навигационные данные (НД).
Описание примера исполнения
В способе спутниковой гравитационной градиентометрии используют измерительный гравитационный градиентометр, который располагают в центре масс корпуса КА 10 вытянутой обтекаемой формы, находящегося в условиях невесомости и условиях минимизации внешних возмущений. В данном способе используют электростатический гравитационный градиентометр, у которого центральным измерительным устройством является блок прецизионных линейных акселерометров БА 1. Положение блока датчиков угловых скоростей БДУС 20, как устройств, влияющих на точность градиентометрии (см. сайт: https://www.bestreferat.ru/referat-32636.html), фиксируют с высокой точностью относительно центра масс КА (например, с погрешностью не более 1 мм).
Кроме того:
• элементы конструкции КА и служебные системы устанавливают максимально приближенными к равномерному распределение их масс вокруг центра масс КА;
• для снижения "паразитного" магнитного момента и снижения уровней помех сильноточные источники и потребители располагают на максимально близком расстоянии относительно друг друга;
• исключают воздействия сил негравитационного происхождения и если воздействия не могут быть исключены принципиально, их максимально уменьшают.
К воздействиям негравитационного происхождения относят, прежде всего, силы механического происхождения от вращающихся устройств, аэродинамические, от нескомпенсированного магнитного момента, а также геометрических изменений элементов конструкции КА.
Прецизионные линейные акселерометры (2-7), имеющие приемлемые значения отношения шум/сигнал (см. сайт: https://docplayer.ru/28937812-Lekciya-8-tema-akselerometry-lineynyh-uskoreniy.html), в БА 1 попарно на расстоянии, определяющем конструктивными размерами корпуса КА 10 (например, как у прототипа 50 см друг от друга при диаметре корпуса КА 20 - около 1 м), располагают, жестко связанными с конструкцией, симметрично относительно центра масс КА, по осям его ортогональной системы координат x, y, z, при этом ось z направлена к центру масс Земли, ось x направлена в сторону вектора скорости КА, ось y дополняет систему до правой ортогональной (получают так называемую «конфигурацию алмазного кристалла», см. Кащеев Р.А. Современные методы спутниковой гравиметрии. 2015. С. 41). Для стабилизации взаимного расположения между акселерометрами (2-7) в БА 1 их устанавливают на основании 8 из высокостабильного усиленного углеволокна (например, карбон/карбон), имеющего сотовую структуру, изотропность свойств по всем направлениям и низкий коэффициент теплового расширения (приблизительно 10-7 1/K). Основание 8 закрепляют на специализированной равножесткой подвеске СРП 9. Стабильность температуры основания 8 поддерживают с помощью блока системы терморегулирования БСТ 11.
Массогабаритные показатели акселерометров (2-7) в БА 1 определяются в основном массой и габаритами космического аппарата. За базовую основу, в качестве примера можно принять данные показатели у прототипа, который имеет конструкцию в виде единого жесткого восьмигранника массой около 1000 кг, длиной приблизительно 5 м, диаметром около 1 м:
• каждый акселерометр содержит прямоугольную подвижную массу из сплава платина-родий с размерами 4×4×1 см и массой 320 г;
• собранная платформа с тремя парами акселерометров весит 150 кг
(см. М.И. Евстифеев. Состояние разработок бортовых гравитационных градиентометров. Гироскопия и навигация. Том 24, №3 (94), 2016, стр. 105).
Для снижения коэффициента линейного термического расширения силовую часть корпуса КА 10 выполняют в виде углепластикового каркаса, что позволяет обеспечить стабильность размеров его конструкции, а также точное стабильное взаиморасположение устройств бортовой аппаратуры и служебных систем, располагаемых внутри каркаса на сотовых панелях.
На высоте термосферы 260 км используют акселерометры с чувствительностью не менее 10-12м⋅с-2⋅Гц-1/2 (см. Приборы и методы измерений. 2016. Τ 7. №3. С 241). Для обеспечения данной высокой чувствительности в каждом акселерометре (2-7) подвижные массы подвешивают в бесконтактном электростатическом подвесе. С помощью устройства удержания положения подвижных масс УУП ПМ 16, формируют электростатическое поле в котором с помощью цепей следящих обратных связей удерживают положения подвижных масс акселерометров (2-7) в подвесе, которые контролируют с помощью пар электродов (расположенных в разных направлениях относительно подвижных масс), составляющих основу емкостных датчиков ЕД 12 (см. В.Д. Вавилов. Математическая модель микросистемного акселерометра с электростатической отработкой. Труды Нижегородского государственного технического университета им. Р.Е. Алексеева №3(90), 2011). Использование емкостных датчиков ЕД 12, например, на основе резонансных емкостных мостовых схем, позволяет обеспечить высокие технологичность и чувствительность (см. сайт: https://ozlib.com/867740/tehnika/erkostnye_datnhiki).
Перемещения подвижных масс акселерометров (2-7) под воздействием внешних сил постоянно контролируют микроконтроллером 33 (например, через каждые 1 мсек) по изменению напряжений емкостных датчиков ЕД 12. В качестве микроконтроллера 33 можно использовать, например, микроконтроллер 1874BEOST (НИИ электронной техники, г. Воронеж), который обеспечивает обработку сигналов и сопряжение работы ЕД 12, микроЭВМ 15 и УУП ПМ 16.
При этом всякое ускорение для всех шести акселерометров (2-7) означает действие силы на аппарат в целом, а измерение разности ускорений и определение градиента ускорения по каждой из осей приборной системы координат - это как раз искомые неоднородности гравитационного поля Земли. В микроконтроллере 33 и микроЭВМ 15 вычисляют разности ускорений подвижных масс акселерометров, по которым определяют компоненты тензора вторых производных гравитационного потенциала (см. выражение 3). Получение основного уравнения градиентометрии в виде разности ускорений, измеренных парой акселерометров, приведено в книге В.Ф. Канушин, И.Г. Ганагина. "Современные проблемы физической геодезии". Новосибирск, 2013. Стр. 37-39. Основные затруднения при вычислении спутниковой градиентометрии связаны с необходимостью представления компонент матрицы (см. выражение 2) в сферических координатах, поскольку гравитационный потенциал, моделируемый рядом объемных сферических функций, представляет собой функцию сферических координат. Формулы, связывающие вторые производные гравитационного потенциала по осям со вторыми его производными по сферическим координатам, приведены на сайте: https://cyberpedia.su/4×72a4.html.
Для измерения параметров орбиты КА используют систему GPS или ГЛОНАСС в виде приемника спутниковой навигации GPS или ГЛОНАСС (ПСН 17), связанного с антенно-фидерным устройством АФУ 13 (см."Вестник ГЛОНАСС" №3 (19)-2014), информация которого поступает в микроЭВМ 25. Спутники системы GPS или ГЛОНАСС передают периодически уточняемые эфемириды - набор координат, которые определяют положение КА на орбите в различные моменты времени. Под влиянием гравитационного поля Земли и других факторов параметры исходных координат спутниковых систем изменяются и поэтому постоянно уточняются.
Принципиально важным является то, что непрерывно (например, каждые 10 секунд) обеспечивают высокоточное позиционирование КА (с ошибкой порядка 1-2 см) путем привязки спутника его к спутникам космических навигационно-геодезических систем GPS или ГЛОНАСС (см. КАЩЕЕВ Р.А. Дифференциальные методы динамической космической геодезии. Часть 2. Метод спутниковой градиентометрии. Казань, 2006, стр. 38-39), при этом одновременно решают две задачи:
• обеспечивают высокоточную пространственную привязку каждого градиентометрического измерения;
• прямоугольные координаты КА рассматривают как псевдоизмерения, выполненные методом межспутникового слежения по схеме «высокий - низкий» в системе высокоорбитальных спутников систем GPS или ГЛОНАСС и низкоорбитального КА. Такого рода псевдоизмерения обладают высокой информативностью с точки зрения оценивания низкочастотной компоненты модели гравитационного потенциала Земли.
В настоящее время проводятся работы, направленные на повышение точности спутниковой навигации GPS или ГЛОНАСС, связанной с разработкой сверхстабильных стандартов частоты и времени на уровне нестабильности 10-18-10-20 (см. достижения по отечественным и зарубежным фирмам на сайте: https://con-fig.com/wp-content/uploads/2019/02/Fateev-Vyacheslav-Filippovich-VNIIFTRI-Relyativistskaya-geodeziya-i-ee-prakticheskie-prilozheniya.pdf).
При нарушении в работе спутниковой системы навигации используют орбитальные данные, полученные в результате наземных наблюдений за КА, и передачу команд управления (КУ) из наземного комплекса управления, при этом высокую точность наблюдения за орбитой КА достигают как с использованием приемника GPS или ГЛОНАСС (ПСН 17), так и, например, уголковых лазерных отражателей УЛО 31 на КА, обеспечивающих слежение за КА с помощью наземных лазеров (см. сайт: https://helpiks.org/8-89555.html).
С целью увеличения силы взаимного притяжения двух тел, высоту КА в термосфере выбирают наиболее низкой, приблизительно 260 км над геоидом, т.к. ниже границы (приблизительно на высоте 230 км) наблюдается существенное влияние атмосферного торможения. Поскольку высота КА находится на высоте близкой к нижней границе, то форму корпуса КА 10 выбирают в виде вытянутой обтекаемой формы для снижения влияния атмосферного торможения и как следствие, уменьшения расхода рабочего тела корректирующей двигательной установки ДУ 27, в результате чего увеличивают длительность срока активного существования КА. В корректирующей двигательной установке ДУ 27, управляемой от микроЭВМ 15, для компенсации атмосферного торможения (негравитационного сноса) и других негравитационных воздействий на КА устанавливают ионный двигатель, создающий импульсы ионизированных атомов, например, ксенона. Выбор ионного двигателя является рациональным решением при длительной эксплуатации в космосе.
Достоинством ионных двигателей является малый расход топлива и продолжительное время функционирования (см. сайт: https://ru.wikipedia.org/wiki/).
Компенсацией линейных составляющих сил вдоль траектории полета с помощью корректирующих ионных двигателей, имеющих устройство управления вектором тяги, а также пассивные хвостовые стабилизаторы, достигают равномерное движение на заданной траектории в термосфере, находящейся под воздействием силовой функции реальной Земли, которая отличается от силовой материальной точки или шара на величину возмущающей или пертурбационной функции R (см. В.И. Крылов. Основы теории движения ИЗС. Часть вторая: возмущенное движение, 2016, стр. 3). Возмущающая функция R включает в себя:
• отличие гравитационного потенциала реальной Земли (геопотенциала) от гравитационного потенциала шарообразной Земли с равномерным распределением плотности;
• возмущающие функции притяжения Луны и Солнца;
• приливная возмущающая функция.
Кроме того, помимо сил гравитационного притяжения на КА в полете действуют и другие силы, вызывающие дополнительные возмущающие ускорения КА:
• сопротивления атмосферы (торможение которых вызывает наибольшее возмущающее ускорение);
• светового давления;
• действия электромагнитного поля Земли и другие.
Рассмотрим управление движением космического аппарата в реальных условиях при различных воздействиях на него и выбор рациональных решений по повышению эффективности целевой работы.
Приведем системы координат, которые будем использовать при описании управления движением КА:
- связанная система координат КА OXsYsZs (базис S), у которой начало координат совпадает с центром масс КА, все оси расположены вдоль строительных осей КА и определяются следующие углы:
• крен - вращение вокруг оси OXs;
• рыскание - вращение вокруг оси OZs;
• тангаж - вращение вокруг оси OYs;
- орбитальная система координат ОХо YoZo (базис О), у которой начало системы координат О совмещено с центром масс КА, ось ΟΖο расположена на продолжении радиус-вектора орбиты, ось ОХо перпендикулярна оси ΟΖο, находится в плоскости орбиты и направлена в сторону вектора скорости КА, а ось ΟΥο перпендикулярна плоскости орбиты (опорная система координат). Вектор скорости вращения опорной системы координат направлен по оси ΟΥο.
- приборная система координат ОХп ΥпΖп - базис Π (интегрирование кинематических уравнений позволяет обеспечить ее построение);
- инерциальная система координат ΟΧиΥиΖи, имеющая начало О в центре Земли, ось ОХи направлена в точку весеннего равноденствия, ось ΟΖи направлена по мгновенной оси вращения Земли в сторону Северного полюса мира, ось ΟΥи дополняет систему ΟΧиΥиΖи до правой (вторая экваториальная система координат).
При отделении КА от ракеты или разгонного блока осуществляется процесс успокоения, затем процесс приведения (совмещение осей связанной системы координат КА OXsYsZs (базиса S) с осями орбитальной системы координат OXoYoZo (базисом О) и последующая стабилизация КА.
Вначале процесса успокоения автоматически запускается режим начального демпфирования, предназначенный для снижения кинетического момента (гашение начальных угловых скоростей) КА, возникающего при отделении, и стабилизации КА относительно произвольной инерциальной системы координат, определяемой на момент отделения, то есть обнуления начального кинетического момента КА. В виду того, что КА является низкоорбитальным, то в данном ближнем космосе присутствует действие геомагнитного поля Земли (присутствует приблизительно до высоты приблизительно 9000 км), позволяющее использовать его для создания магнитными системами КА внешние управляющие механические воздействия на КА.
Успокоение и последующая стабилизация КА осуществляется управляющими механическими моментами Мx, Мy, Μz по осям управления ΚΑ (Χ, Υ, Ζ), получаемыми в результате взаимодействия генерируемых электромагнитной системой управления ЭМСУ 18 магнитных моментов относительно координатных осей КА - Lx, Ly, Lz с магнитными индукциями относительно координатных осей КА - Вx, Вy, Bz вектора магнитной индукции магнитного поля Земли в соответствии с формулой:

где Μ - управляющий вектор механического момента;
L - вектор создаваемого магнитного момента электромагнитными устройствами;
В - вектор магнитной индукции магнитного поля Земли.
В проекциях на оси управления КА выражение (4) принимает вид:
(см. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 21-22).
В качестве магнитных исполнительных органов ЭМСУ 18 можно использовать, например, электромагниты стержневого типа с сердечником из магнитно-мягкого материала с обмотками из медного провода (см. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 178).
С целью повышения надежности и живучести электромагнитной системы управления ЭМСУ 18 (см. например, патент РФ № 2625687) устройство формирования механического момента электромагнитом в ней выполняют по схеме резервирования (см. например, патент РФ № 2672316).
В качестве датчиков компонент геомагнитной индукции можно использовать трехмерный магнитометр ТММ 25, например, магнитометр цифровой трехкомпонентный МЦТ-11 разработки АО «Раменское приборостроительное конструкторское бюро», который вырабатывает сигналы компонент магнитной индукции Вx, Вy, Bz.
Магнитные моменты относительно координатных осей КА - Lx, Ly, Lz формируют электромагнитами ЭМСУ 18 по сигналам ϒx, ϒy, ϒz, поступающими с выхода микроЭВМ 15, формируемыми по сигналам компонент кинетического момента Кх, Ку, Кz, поступающими с блока датчиков угловых скоростей БДУС 20 и сигналам компонент магнитной индукции Вх, Ву, Βz, поступающими с магнитометра ТММ 25.
Сигналы ϒx, ϒy, ϒz описываются выражениями:
В качестве микроЭВМ 15 возможно применение 4-канальной ЦВМ201 (разработка АО «НИИ «Субмикрон», г. Зеленоград), при этом с целью повышения надежности рекомендуемым вариантом является мажоритированная работа 3-х модулей, а четвертый находится в холодном резерве.
Процесс приведения запускается автоматически, или по команде центральной ЭВМ 21. На основании навигационных данных (НД), периодически получаемых из центральной ЭВМ 21 через информационный интерфейсный модуль ИИМ 22 (в соответствии с требованием ГОСТ Ρ 52070-2003), микроЭВМ 15 определяет текущее положение центра масс КА в географической системе координат в привязке к текущему значению универсального кодированного времени (UTS) и вычисляет вектор геомагнитной индукции по международной модели геомагнитного поля IGRF (International geomagnetic reference field).
Магистральную шину линии передачи информации выполняют, например, из кабеля с витой экранированной парой проводов в защитной оболочке, к которым с обоих концов кабеля подключаются согласующие элементы. В качестве ИИМ 22 может быть использован, например, модуль сопряжения USB TA1-USB с мультиплексным каналом по ГОСТ Ρ 52070-2003 (MIL-STD-1553 В).
Поскольку на территории России отсутствует сеть опорных измерений векового хода геомагнитного поля, для целей интерпретации используют мировую модель нормального поля. Эта модель основана на представлении нормального поля в виде ряда по сферическим функциям, коэффициенты которого определяются каждые 5 лет на основе мировой сети магнитных обсерваторий (см. патент РФ № 2447405).
где X, Y, Ζ - соответственно северная, восточная и вертикальная составляющие;
R - средний радиус Земли, r - расстояние от точки до центра Земли;
λ - долгота, θ=π/2-ϕ - дополнение до широты;
Pnm(cosθi) - присоединенная функция Лежандра первого рода;
gnm,hnm - сферические гармонические коэффициенты.
На основании получаемых данных и с использованием матрицы преобразования из географической системы координат в орбитальную систему ориентации, микроЭВМ 15 формирует сигналы ϒx, ϒy, ϒz, в соответствии с выражением (6), по которым на электромагнитах ЭСМУ 18 формируют требуемые магнитные моменты относительно координатных осей КА - Lx, Ly, Lz, обеспечивающих совместно с Вx, Вy, Bz заданное механическое управление Мx, Мy, Mz (см. выражение 5) для переориентации КА в орбитальную систему координат.
Следует отметить, что при практической реализации ЭМСУ 18 обеспечивается высокая надежность, в том числе, в связи с тем, что положение вектора управляющего момента ортогональных осей электромагнита, обеспечивает некоторую избыточность системы. Это объясняется тем, что каждый электромагнит, расположенный параллельно координатной оси, при наличии трех координатных составляющих геомагнитной индукции может создавать управляющие моменты, направленные по двум остальным координатным осям.
Как было описано выше, в ДУ 27 используют ионный двигатель из-за его достоинства в виде малого расхода топлива и продолжительного времени функционирования, однако он в нынешних реализациях обеспечивает очень слабую тягу (порядка 50-100 миллиньютонов), поэтому, с учетом больших затрат электроэнергии от аккумуляторной батареи АБ 30 для его работоспособности, проведение процесса успокоения КА с помощью ионного двигателя нецелесообразно (см. сайт: https://ru.wikipedia.org/wiki/). Для процесса успокоения КА используют электромагнитную систему управления ЭМСУ 18 (управление движением относительно центра масс КА), не имеющей подвижных частей, однако, с учетом того, что ее электропитание в процессе успокоения осуществляют только от аккумуляторной батареи АБ 30 практически без подзаряда от солнечных батарей СБ 29, возникают следующие недостатки:
• процесс успокоения с последующей стабилизацией КА осуществляют в течение длительного времени в виду ограниченных по массе и габаритам электромагнитов в электромагнитной системе управления ЭМСУ 18 (так, например, в КА «Метеор-М» с общей массой около 3000 кг, в электромагнитной системе управления, поставляемой заявителем данного изобретения АО «НИИЭМ», присутствуют электромагниты, создающие достаточно большой магнитный момент - 400 А⋅м2, обеспечивают успокоение КА в течение времени 5÷5,5 часов на средней высоте 832,2 км и периодом обращения 101,3 мин при начальной угловой скорости после отстыковки от разгонного блока «Фрегат» 3%);
• в течение данного длительного времени успокоения КА питание осуществляют от АБ 30 без номинальной подзарядки ее от солнечных батарей СБ 29.
Поэтому для исключения в процессе успокоения КА полного расходования остаточной емкости АБ 30 (под остаточной емкостью аккумулятора Сост следует понимать значение количества электрической энергии, выраженное в ампер часах или Кулонах, которое аккумулятор отдает при разряде до выбранного конечного напряжения в любом текущем его состоянии) обеспечивают достаточный запас по ее номинальной емкости, что может отражаться на массе и габаритах источника питания, который рассчитывают для эксплуатации КА на орбите в штатном режиме с учетом режима целевой работы.
Таким образом, условиями по выбору номинальной емкости АБ 30 с приоритетным выбором из двух условий максимального значения Сосг (с определенным эксплуатационным запасом) являются:
где
Iмакс - максимальный потребляемый ток в режиме успокоения КА;
tусп.макс - максимальное время успокоения КА;
Сост.мин - минимальное значение остаточной емкости аккумуляторной батареи АБ 30 в конце освещенной орбиты (начале прекращения возможности заряда АБ 30 от СБ 29), достаточное для прохождения теневого участка на данном витке орбиты.
С целью исключения воздействия негравитационного происхождения в виде механических сил под действием приводных двигателей солнечных батарей СБ 29 для получения максимально возможного в текущей точке орбиты КА значения тока, вырабатываемого СБ 29 (для приближения к выполнению оптимального условия cosα=1=const, где α - угол между перпендикуляром к поверхности СБ 29 и направлением на Солнце), панели СБ 29 закрепляют жестко на поверхностях многогранного корпуса КА, например, на поверхностях восьмигранного корпуса. Это позволяет получить достаточно большие токи от СБ 29 без дополнительной закрутка корпуса КА для оптимальной ориентации их на Солнце и исключить для закрутки подвижные части. Уже на этапе процесса успокоения КА, близкого к завершению, токи достигают значений, достаточных для заряда АБ 30 от СБ 29. Следует отметить, что оптимальная величина тока заряда АБ 30 должна находиться в пределах от 0,1 до 0,3 номинальной ее емкости, т.к. малые зарядные токи (менее 0,1 номинальной емкости АБ 30) не позволяют проводить заряд с высоким коэффициентом полезного действия, а заряд током менее 0,03 номинальной емкости практически не приводит к повышению емкости АБ 30 (см. патент РФ № 2510105).
В процессе управления космическим аппаратом наряду с навигацией постоянно определяют его ориентацию в пространстве, задачей которой является удержание равными или близкими к нулю углов ориентации, т.е. углов между одноименными осями триэдров (трех взаимно перпендикулярных осей пересекающихся в одной точке), жестко связанного с корпусом КА и определяющего оси ориентации.
В системе ориентации КА используют бесплатформенный инерциальный блок БИБ 14, который формирует на борту базовые системы отсчета с использованием надежных микроЭВМ 15, обладающими нужным объемом памяти с достаточным быстродействием и обеспечивающими непрерывное интегрирование уравнений движения КА при сколь угодно сложном характере его движения. В нем отсутствуют громоздкие следящие привода гиростабилизированных платформ, имеющие общий недостаток - они установлены в кардановых подвесах.
БИБ 14 строят на базе высокочувствительных датчиков угловой скорости БДУС 20, устанавливаемых по трем осям x, y, z и измеряющих непосредственно вектор угловой скорости. С целью повышения надежности и живучести БДУС 20 при минимальных аппаратных затратах применяют функциональную избыточность (четыре, шесть и более) на основе использования неортогонального расположения датчиков угловых скоростей. При этом за счет выбора рациональной конфигурации датчиков угловых скоростей точность БДУС 20 может быть повышена на 30-40% (см. Разработка измерительного блока системы ориентации БПЛА с неортогональным расположением чувствительных элементов // Современная техника и технологии, 2016, №3).
В качестве датчиков угловых скоростей БДУС 20 (приборов, неподвижно устанавливаемых на корпусе КА и позволяющих измерять составляющие вектора угловой скорости, параллельные оси чувствительности соответствующего датчика угловой скорости) используют, например, приборы БИУС-14 разработки ЗАО НПП «Антарес» (г.Саратов) на основе волоконно-оптических гироскопов, принцип действия которых основан на эффекте Саньяка и не имеющих подвижных частей, что является их достоинством при использовании в предлагаемой заявке.
С помощью БДУС 20 определяют текущие угловые скорости, а на выходе микроЭВМ 15 вектор углового положения КА относительно некоторого начального путем интегрирования текущих угловых скоростей. Однако неустранимым недостатком является то, что на точность определения ориентации КА по интегралу показаний влияет наличие постоянной ошибки измерения угловой скорости, которая с течением времени приводит к недопустимому накоплению погрешности определения углового положения КА. Для устранения накапливаемой погрешности ориентации требуется периодическая коррекция, которая может осуществляться датчиками углового положения относительно небесных светил (Солнца, Земли, звезд), позволяющим определить ориентацию КА относительно опорной системы координат, поэтому используют совместную работу датчика угловой скорости и датчика положения КА следующим образом.
В БИБ 14 с помощью микроЭВМ 15 осуществляют интегрирование кинематических уравнений по информации БДУС 20 об абсолютной угловой скорости КА, а устройством коррекции ошибки УКО 19 обеспечивают постоянное отслеживание систематических погрешностей текущих угловых скоростей БДУС 20, ошибок интегрирования кинематического уравнения микроЭВМ 15 и неточностей задания вектора угловой орбитальной скорости, которые компенсируют посредством механического воздействия исполнительными органами на корпус КА 10 по рысканью, крену и тангажу (см. патент РФ № 2517018). При этом в целях исключения сил механического происхождения от вращающихся устройств (исключения воздействий негравитационного происхождения) в качестве исполнительных органов в основном используют электромагнитную систему управления ЭМСУ 18 (основной режим работы), не имеющую подвижных частей и формирующую оптимальные управляющие механические моменты Мx, Мy, Mz (см. патент РФ № 2625687) в соответствии с выражением (5). Следует отметить, что для обеспечения оптимального движения КА вокруг центра масс (например, для выполнения определенных служебных команд), в случаях недостаточности механических моментов от электромагнитной системы управления ЭМСУ 18, используют, широко применяемые для этих целей двигатели-маховики (см. патент РФ № 2676592). При этом следует учитывать, что точность гравитационной градиентометрии снижается (двигатели-маховики на фиг. 2 не показаны).
По точности, среди известных средств определения положения КА в пространстве (с использованием измерений относительно небесных светил: Солнца, Земли, звезд), а именно, солнечных датчиков, магнитометров, звездных датчиков и т.д., предпочтение отдается звездным датчикам (см. патент РФ № 2669481). Кроме того, звездные датчики, основанные на ПЗС- или КМОП-матрицах, не содержат подвижных частей, поэтому являются наиболее оптимальными устройствами для использования их в спутниковой гравитационной градиентометрии.
Однако звездный датчик (ЗД) зависит от внешних ориентиров, при отсутствии в поле зрения которых он не работает, а также других факторов:
- при включении системы ЗД, требующем определенного времени для отыскания требуемого участка неба, путем выделения звезд и отождествления их с объектами, содержащимися в бортовом звездном каталоге датчика (блок электроники ЗД должен проделать над полученным изображением следующие действия):
• произвести поиск изображений звезд на изображении фрагмента неба;
• для найденных звезд получить оценки координат их центров на ПЗС- или КМОП-матрицах и оценки блеска;
• произвести отождествление конфигурации звезд в поле зрения ЗД со звездами из бортового каталога с учетом помех;
• сделать прогноз входа и выхода звезд из поля зрения.
- при непосредственной засветке ЗД Солнцем. Если Солнце попадает непосредственно в поле зрение ЗД, то прибор перестает функционировать, так как становится невозможным регистрировать звезды на фоне рассеянного солнечного излучения. То же самое происходит, когда Солнце находится вне поля зрения ЗД, но вблизи от его границ;
- при сильных помехах, которые создают:
• изображения звезд, не включенных в каталог;
• тела Солнечной системы;
• искусственные спутники Земли;
• освещенные Солнцем пылинки вблизи объектива ЗД;
• астрофизические транзиенты (вспыхивающие звезды, гамма-всплески, гравитационные микролинзы);
• космические лучи, попадающие на матрицу фотоприемника;
• сильное ионизирующее воздействие космического пространства
(самой длительной будет полная процедура восстановления ориентации, когда априорная информация отсутствует. Такая процедура выполняется как при включении системы ЗД, так и при потере ориентации).
Поэтому используют избыточную систему, например, в виде трех звездных датчиков, два из которых, определенным образом расположенными относительно мешающими небесными телами - Солнца, Луны и Земли, находятся в работе, а один находится в резерве.
Для повышения надежности управления движением КА по заданной орбите используют рациональное решение в виде совместной работы датчиков угловой скорости БДУС 20 (датчиков текущей угловой скорости КА) и звездных датчиков БЗД 23 (датчиков положения КА) в сочетании с менее точными датчиками ориентации первого типа ДО 26 - солнечным датчиком СД 24 и трехмерным магнитометром ТММ 25 (под ориентиром первого типа подразумевается опорный ориентир, который невозможно спутать с другим и нет причин ожидать больших помех в аппаратуре от каких-то источников, не связанных с искомым ориентиром, которым является Солнце - источник мощнейшего излучения практически во всем диапазоне волн или заданное направление в магнитном поле Земли, т.е. вектор геомагнитного поля Земли (см. Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. - М.: Наука, 1974. - стр. 81). Примеры трехосной ориентации КА с использованием солнечного датчика СД 24 и трехмерного магнитометра ТММ 25 представлены в патенте РФ № 2408508, а также в статье Овчинников М.Ю., Пеньков В.И., Ролдугин Д.С. Трехосная магнитная система ориентации космического аппарата в инерциальном пространстве // Препринты ИПМ им. М.В. Келдыша. 2013. №74. 24 с.
При этом в качестве ТММ 25 целесообразно использовать обязательно присутствующего его в ЭМСУ 18, что положительно сказывается на массогабаритных характеристиках и надежности КА.
В качестве солнечного датчика СД 24 можно использовать оптический солнечный датчик (патент РФ № 2517979) с высокой точностью определения угловых координат Солнца (погрешность менее 1 угловой минуты по всему полю зрения 190°×190°). При засветке звездного датчика БЗД 23 вместо его данных используют информацию о положении Солнца по высокоточному СД 24, которая предсказывается на любой момент времени с достаточно высокой точностью.
Датчики углового положения в виде датчиков ориентиров первого типа - солнечного датчика СД 24 и трехмерного магнитометра ТММ 25 используют, прежде всего, в начале штатной работы БИБ 14 при отсутствии информационных показаний положения КА с БЗД 23, требующих определенное время, а также при каких-либо вышеуказанных нарушениях в работе БЗД 23, приводящих к превышению заданных погрешностей вектора угловой скорости КА.
БЗД 23 позволяет определить матрицы перехода от системы координат БЗД 23 к системе координат звездного каталога, приведенную на текущую эпоху, Прибором звездной ориентации БЗД 23 определяют параметры матрицы (кватерниона) поворота от приборной системы координат ко второй экваториальной системе координат (инерциальной) и обеспечивают пространственное положение блока акселерометров БА 1 и углов его наклона для координатной привязки.
Для описания конечного поворота КА используют математический аппарат кватернионов и параметры Родрига-Гамильтона, которые в отличие от углов Эйлера (Крылова) позволяют избавиться от операций с тригонометрическими функциями, что повышает эффективность использования микроЭВМ 15, а также из-за того что кинематические уравнения в параметрах Родрига-Гамильтона являются линейными уравнениями, которые не вырождаются при любом угловом положении КА (см. В.Н. Бранец, И.П. Шмыглевский. Применение кватернионов в задачах ориентации твердого тела. - М.: Наука, 1973. - С. 8-11).
Пусть относительно инерциального пространства базис S вращается с угловой скоростью ω=[ωx, ωy, ωz]T, а базис Ο - с угловой скоростью Θ=[Θx, Θy, Θz]T (Т означает транспонирование матрицы). Кинематическое уравнение, определяющее положение базиса S относительно базиса Ο с использованием параметров Родрига-Гамильтона (см. Труды МФТИ - 2010. - Том 2, №3, Аэрокосмические исследования, прикладная механика, стр. 189), имеет вид:

В начальный момент процесса приведения базис S совмещают с базисом О.
Построение на борту КА приборного базиса Π обеспечивают интегрированием кинематического уравнения (см. Вопросы электромеханики. Труды ВНИИЭМ Т. 163, №2, 2018 г., стр. 4):

где
Λ=[λ0, λ1, λ2, λ3] - кватернион рассогласования, задающий переход от приборного базиса Π к связанному базису S;
ωs=[о, ωx, ωy, ωz] - кватернион угловой скорости КА, у которого компоненты ωx, ωу, ωz проекции вектора абсолютной угловой скорости КА на оси связанного базиса S.
Известно, что полное линейное ускорение КА раскладывается на тангенциальную и нормальную составляющие ускорения вращения на мгновенной окружности (см. сайт: https://intemeturok.ru/lesson/physics/11-klass/podgotovka-k-ege/uskorenie-normalnaya-i-tangentsialnaya-sostavlyayuschie-uskoreniya). В предлагаемом изобретении отделение нормальной составляющей от тангенциальной осуществляют следующим образом:
• в приборной системе координат при вращательном движении КА вокруг центра масс в БИБ 14 с помощью БДУС 20 фиксируют вектор угловой скорости вращения КА вокруг трех осей системы координат;
• в измерителе нормальных составляющих угловых ускорений ИНС УУ 34, в котором используют угловой акселерометр (см. патент РФ № 2399915), определяют нормальные составляющие ускорений вектора угловой скорости вращения КА;
• в микроЭВМ 15 отделяют нормальную составляющую ускорения, вызванную вращательным движением КА вокруг центра масс и получают показатели измеренных линейных ускорений без их вклада.
По текущим значениям линейного ускорения КА, в микроЭВМ 15 формируют сигнал коррекции, который подают на двигательную установку ДУ 27 для обеспечения равномерного движения КА.
Для снижения погрешности определения ориентации КА относительно инерциальной системы координат, связанной с изменением взаимного положения датчиков определения ориентации (БЗД 23, БДУС 20 - датчики, определяющие точность целевой работы), включая блок акселерометров БА 1, под действием механических, тепловых и других деформаций конструкций, на которых они устанавливаются, обеспечивают устранением систематических ошибок (выборочно для датчиков БЗД 23, БДУС 20 и блока акселерометров БА 1 в случае, если погрешности превышают заданное значение) с помощью устройства контроля взаимного положения и компенсации "смещений" УКиКС 28, описанного в патенте РФ № 2620854, в котором:
• определяют ориентации датчиков и блока акселерометров БА 1 относительно конструкционной системы координат устройства (в устройстве отсутствуют подвижные части, что позволяет обеспечить высокую точности целевой работы);
• получают матрицы Q трехмерного поворота системы координат устройства относительно инерциальной системы координат;
• определяют ориентацию КА относительно инерциальной системы координат в форме матрицы А, которую вычисляют по формуле:

где К - известная матрица трехмерного поворота, переводящего оси конструкционной системы координат устройства в оси конструкционной системы координат КА.
Таким образом, достигают высокой точности и надежности спутниковой гравитационной градиентометрии при длительной автономной эксплуатации КА в космосе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| Способ управления движением центра масс низкоорбитального космического аппарата | 2023 |
|
RU2837207C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2021 |
|
RU2776096C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Способ астроинерциальной ориентации и устройство для его осуществления | 2022 |
|
RU2836748C2 |
Использование: для определения градиентов силы тяжести или вторых производных потенциала силы тяжести Земли. Сущность изобретения заключается в том, что размещают в центре масс корпуса космического аппарата вытянутой обтекаемой формы градиентометр, в котором на каждой оси x, y, z устанавливают по паре неподвижных линейных акселерометров с заданным расстоянием между ними, с помощью двигательной установки обеспечивают равномерное движение космического аппарата на заданной траектории, параметры движения космического аппарата контролируют с помощью системы GPS или ГЛОНАСС и системами слежения с Земли, солнечные батареи жестко закрепляют на корпусе космического аппарата, при этом ориентацию космического аппарата на заданной орбите обеспечивают с помощью бесплатформенного инерциального блока, для создания необходимого крутящего момента, воздействующего на корпус космического аппарата, используют электромагнитную систему. Технический результат: обеспечение возможности достижения высокой точности и надежности спутниковой гравитационной градиентометрии при длительной автономной эксплуатации космического аппарата в космосе. 1 ил.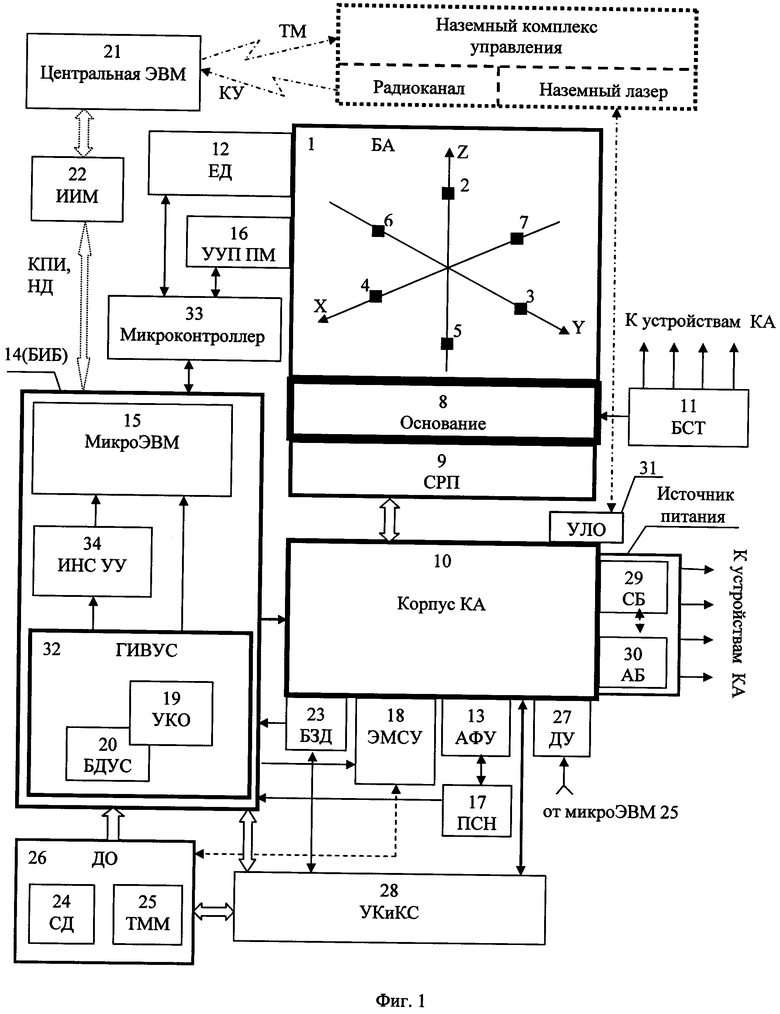
Способ спутниковой гравитационной градиентометрии, заключающийся в размещении в центре масс корпуса космического аппарата вытянутой обтекаемой формы градиентометра для снижения влияния угловых ускорений, в котором на каждой оси x, y, z устанавливают по паре неподвижных линейных акселерометров с заданным расстоянием между ними, которые располагают на основании из высокостабильного усиленного материала, имеющего сотовую структуру, поддерживают стабильность температуры основания и закрепляют ее на специализированной равножесткой подвеске, при этом каждую подвижную массу в акселерометрах в невесомости удерживают электростатическим полем вблизи заданного положения и ее перемещения измеряют емкостными датчиками; с помощью двигательной установки обеспечивают равномерное движение на заданной траектории, параметры движения космического аппарата контролируют с помощью системы GPS или ГЛОНАСС и системами слежения с Земли, линейные ускорения по осям x, y, z, измеряют градиентометрами, отличающийся тем, что положение блока датчиков угловых скоростей фиксируют с высокой точностью относительно центра масс КА; элементы конструкции космического аппарата и служебные системы устанавливают максимально приближенными к равномерному распределению их масс вокруг центра масс КА; жестко закрепляют солнечные батареи на корпусе космического аппарата, при этом космический аппарат ориентируют на заданной орбите с помощью блока датчиков угловой скорости, микроЭВМ, входящих в бесплатформенный инерциальный блок, систематические ошибки которого, вызванные погрешностями блока датчиков угловой скорости, ошибками интегрирования кинематического уравнения микроЭВМ и неточностями задания вектора угловой орбитальной скорости, компенсируют путем сравнения в устройствах коррекции ошибки с положением космического аппарата по блоку звездных датчиков, выполненного по избыточной схеме с резервированием, или датчикам ориентации, при этом используют бесплатформенный инерциальный блок, блок звездных датчиков и датчики ориентации первого типа без подвижных частей; управляют по сигналам микроЭВМ электромагнитной системой для создания необходимого крутящего момента, воздействующего на корпус космического аппарата для его управления; для описания конечного поворота космического аппарата от приборной системы координат ко второй экваториальной системе координат (инерциальной) используют математический аппарат кватернионов и параметры Родрига-Гамильтона; по нормальным и тангенциальным составляющим ускорений вектора угловой скорости вращения КА формируют сигнал коррекции линейного ускорения КА для двигательной установки; снижают погрешности определения ориентации космического аппарата относительно инерциальной системы координат за счет устранения систематической ошибки, связанной с изменением взаимного положения блока датчиков угловой скорости, блока звездных датчиков и блока акселерометров.
| М.И | |||
| Евстифеев, Состояние разработок бортовых гравитационных градиентометров, Гироскопия и навигация, том 24, N 3 (94), 2016, стр | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| СПОСОБ ИЗМЕРЕНИЯ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ | 2003 |
|
RU2251127C1 |
| СПОСОБ ИЗМЕРЕНИЯ АНОМАЛИЙ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ ПРИ ПРОВЕДЕНИИ ЛАБОРАТОРНЫХ РАБОТ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2398249C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ ГРАВИТАЦИИ | 2013 |
|
RU2543707C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| US 4550601 A, 05.11.1985. | |||

