Изобретение относится к космической технике и применяется для удерживания объектов на внешней поверхности ракетно-космических аппаратов.
Известен способ удерживания объектов, заключающийся в закреплении объектов на опорном основании в сложенном положении и освобождении в расчетный момент для выполнения программных функций, включающих разворот объектов в рабочее положение таким образом, что освобождение производят при страгивании и удалении опорного основания по направлению, не совпадающему с направлениями накладываемых связей в замковых устройствах при закреплении объектов.
Способ реализуется с помощью устройства для удерживания объектов на КА, содержащего узлы крепления на КА и ракете, причем крепление на ракете осуществляется при помощи устройства, расположенного на последней ступени ракеты-носителя. Устройство выполнено в виде тросовых бандажей, прижимающих солнечные батареи к опорным площадкам на последней ступени ракеты-носителя и служащих для защиты батарей от вибрационных нагрузок выведения. Освобождение батарей осуществляется после снятия тросовых бандажей специальным механизмом перед отделением спутника от последней ступени ракеты-носителя, что позволяет батареям раскрываться при помощи поворотных устройств на спутнике.
Недостатком подобных решений является принудительное снятие тросовых бандажей для обеспечения освобождения солнечных батарей перед отделением спутника, что снижает надежность их раскрытия.
В качестве прототипа для способа и устройства выбраны способ удерживания объектов при помощи разрушающихся в процессе освобождения узлов крепления и устройство для его реализации, применяемые при осуществлении управляемого старта ракеты с помощью замковых устройств в виде стержней, вложенных в матрицы и обжатых по периметру охвата (В.А. Александров и др. Ракеты-носители) /Под общ. ред. проф. С.О. Осипова. - М.: Воениздат, 1981, стр. 192, рис. 5.14). Обжатие стержней матрицей препятствует освобождению ракеты в направлении старта. Каждое замковое устройство снабжено шарнирами для крепления матриц и стержней к ракете и пусковому устройству соответственно, что обеспечивает наложение связей в замковых устройствах путем редуцирования растягивающих усилий в стержнях, при наборе тяги двигательной установки и боковых ветровых нагрузках. Освобождение в замковых устройствах производится в процессе старта ракеты, например, путем деформации и последующего разрушения стержней.
Решение, реализующее управляемый старт ракеты, позволяет освобождать удерживаемые объекты без специальных механизмов, однако сохраняет недостатки аналогичных решений (см. например, патент США N 3327967), выражающиеся в необходимости наложения механических связей на опорные узлы удерживаемых объектов в направлении освобождения. Условие надежности освобождения объекта заключается в безотказности отрыва от опорной поверхности, в обеспечении чего выполняются последовательно два события: снятие связей, препятствующих освобождению, и страгивание объекта в направлении освобождения. Надежность освобождения объекта выражается формулой:
где H - надежность освобождения объекта;
H1 - надежность снятия связей в направлении освобождения
H1i - надежность снятия i-й связи;
H2 - надежность страгивания объекта.
Из приведенной формулы видно, что надежность освобождения объекта снижается с ростом числа связей, накладываемых в направлении освобождения.
Цель изобретения - повышение надежности работы объектов путем повышения надежности его освобождения.
Поставленная цель достигается способом удерживания объектов, согласно которому осуществляют закрепление объектов на опорном основании в сложенном положении и освобождение в расчетный момент для выполнения программных функций, включающих разворот объекта в рабочее положение таким образом, что освобождение производят при страгивании и удалении опорного основания в направлении, не совпадающем с направлениями, ограниченными накладываемыми на объекты связями при их закреплении в замковых устройствах.
Способ реализуется с помощью устройства для удерживания объектов на КА, содержащего узлы крепления на КА и ракеты, причем крепление на ракете осуществляется при помощи замковых устройств в виде стержней, вложенных в матрицы, выполненных так, что замковые устройства закреплены жестко с ориентацией продольных осей стержней и матриц по направлению разделения ракеты и КА, а в замковых устройствах между стержнями и матрицами выполнены гарантированные зазоры.
На фиг. 1 показан пример удерживания солнечных батарей на КА;
на фиг. 2 нанесены направления наложения связей и освобождения батарей, иллюстрирующие способ удерживания;
на фиг. 3-6 приведены варианты конструктивного исполнения устройства для реализации указанного способа.
Изобретение осуществляется следующим образом. КА 1 соединен по плоскости стыка S с последней ступенью ракеты-носителя 2 фиксаторами и снабжен расталкивающими устройствами, действие сил которых направлено вдоль продольной оси ракеты 3 (фиксаторы и расталкивающие устройства на рисунках не показаны). Панель солнечных батарей 4 уложена вдоль ракеты и удерживается на КА1 поворотным устройством 5 и элементами крепления (элементы крепления на рисунках не показаны), а на последней ступени ракеты 2 - с помощью замковых устройств 6, выполненных в виде стержней 7, вложенных в матрицу 8. Связи Q со стороны КА 1 удерживают панель 4 вдоль ракеты 3 в трех, а связи R - co стороны последней ступени ракеты-носителя в двух взаимно перпендикулярных направлениях. Направление К соответствует освобождению панели 4 при страгивании и удалении последней ступени ракеты 2. Направление освобождения К панели 4 перпендикулярно направлениям связей R. Связи Q и R накладывают при сборке КА и ракеты для ограничения перемещений опорных узлов панели при транспортировании КА на орбитальный участок. Связи R снимают путем принудительного выдвижения стержня из матрицы при разделении КА и ракеты по плоскости S. После снятия связей R батареи получают возможность выполнения дальнейших программных функций, в том числе снятия связей Q в расчетный момент времени и разворот батарей в рабочее положение.
Конструктивные исполнения замкового устройства 6 могут быть следующими:
1. Стержень 7 замкового устройства 6 жестко закреплен на панели 4, а матрица 8 жестко закреплена на последней ступени ракеты-носителя 2. Продольные оси стержня 7 и матрицы 8 соответствуют направлению разделения КА 1 и ракеты 2. Между стержнем 7 и матрицей 8 выполнен зазор δ. Величина зазора δ ограничена, с одной стороны, эффективностью защиты панели от вибраций, возникающих при старте ракеты, а с другой стороны - нестабильностью конструкции КА в результате воздействий механических нагрузок. Зазор δ должен быть гарантированным на момент освобождения панели и определятся эмпирическим путем.
2. Матрица 8 замкового устройства 6 выполнена в двух вариантах исполнения, отличающихся формой отверстия матрицы. Между стержнем 7 и матрицей 8 замкового устройства 6 исполнения 1 выполнен кольцевой зазор δ, а в замковом устройстве 6 исполнения 2 выполнены зазоры δ, в направлении, перпендикулярном плоскости панели, и зазоры Δ в плоскости панели. Величина зазора Δ определяется взаимными тепловыми перемещениями панели 4 и ракеты 2 по длине между стержнями 7 замковых устройств 6. Зазор Δ определяется расчетным путем для обеспечения компенсаций тепловых деформаций конструкции на момент освобождения панели.
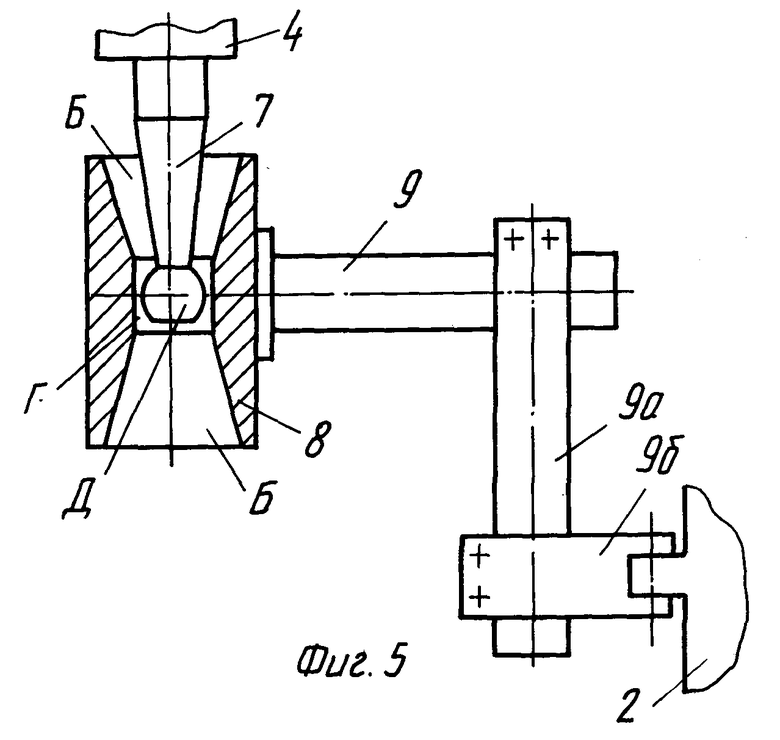
3. Стержень 7 снабжен сферической опорной поверхностью для взаимодействия с матрицей 8, что приводит к снижению расталкивающего усилия за счет снижения сопротивления в замковом устройстве при освобождении.
4. Матрица 8 имеет сквозное отверстие, состоящее из двух конических участков, сужающихся внутрь, и цилиндрического участка. Опорную поверхность стержня 7 при монтаже располагают в пределах цилиндрического участка матрицы 8. Конические участки выполняют роль направляющих при перемещениях панели 4 вдоль оси ракеты 3 при вибрациях и тепловых воздействиях и устраняют возможность заклинивания стержня 7 при отделении ракеты с угловыми перекосами.
5. Матрица 8 имеет регулировочные элементы 9, 9а и 9б, используемые для монтажа замкового устройства 6 и настройки зазоров δ и Δ. Элементы 9а используются дополнительно для обеспечения положения стержней по высоте матрицы. Регулировочные элементы позволяют упростить сборку панели и снизить требования по точности выполнения посадочных поверхностей замкового устройства 6.
6. Матрица замкового устройства выполнена в виде шарнирного подшипника. Стержень 7 выполнен с гладкой цилиндрической поверхностью. Роль матрицы выполняет шарнирный подшипник, имеющий внутреннюю обойму 10, в которую вложен с зазором стержень 7, и наружную обойму 11, которая жестко закреплена на ракете 2. Применение шарнирного подшипника позволяет снизить требование по точности при монтаже замкового устройства в пределах углов ±α, допускаемых при взаимном повороте обойм 10 и 11.
Таким образом, изобретение обеспечивает закрепление объектов КА в сложенном положении и позволяет им выполнять программные функции после освобождения. Закрепление и освобождение объектов предложенным способом обеспечивает надежность освобождения. Устройство для удерживания объектов на КА обеспечивает защиту объектов от вибраций, возникающих при старте ракеты, а также компенсирует тепловые перемещения конструкций. Конструктивные исполнения указанного устройства позволяют снизить трудоемкость и повысить производительность труда при сборке объектов в составе ракетно-космических аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ПАКЕТА ПАНЕЛЕЙ НА СПУТНИКЕ | 1991 |
|
RU2005651C1 |
| ДЕРЖАТЕЛЬ | 1995 |
|
RU2121947C1 |
| СПОСОБ РАЗВЕРТЫВАНИЯ МНОГОСЕКЦИОННЫХ КОНСТРУКЦИЙ И МНОГОСЕКЦИОННАЯ КОНСТРУКЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1993 |
|
RU2123875C1 |
| СПОСОБ ОТДЕЛЕНИЯ СПУТНИКОВ И РАЗВЕДЕНИЯ ИХ НА ОРБИТЕ ПРИ ГРУППОВОМ ЗАПУСКЕ ОДНОЙ РАКЕТОЙ | 1994 |
|
RU2111901C1 |
| ДЕРЖАТЕЛЬ | 1992 |
|
RU2046079C1 |
| Устройство для фиксации навесных конструкций спутника | 1990 |
|
SU1818282A1 |
| СПОСОБ ИСПЫТАНИЙ НА УДАРНОЕ ВОЗДЕЙСТВИЕ | 1991 |
|
RU2085889C1 |
| КОСМИЧЕСКИЙ АППАРАТ БЛОЧНО-МОДУЛЬНОГО ИСПОЛНЕНИЯ | 1995 |
|
RU2092398C1 |
| УСТРОЙСТВО БЛОКИРОВКИ И ОСВОБОЖДЕНИЯ ЭЛЕМЕНТОВ РАСКРЫВАЮЩЕГОСЯ ТИПА | 1995 |
|
RU2111155C1 |
| СПОСОБ ИСПЫТАНИЙ КОСМИЧЕСКОГО АППАРАТА НА МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ | 2008 |
|
RU2383000C2 |

Изобретение относится к космической технике и может применяться для удерживания объектов на внешней поверхности ракетно-космических аппаратов. В предлагаемом способе, включающем закрепление объектов на опорном основании в сложенном положении и освобождение в расчетный момент для выполнения программных функций, в том числе разворота объектов в рабочее положение, освобождение производят при страгивании и удалении опорного основания по направлению, не совпадающему с направлениями, ограниченными накладываемыми связями в замковых устройствах при закреплении объектов. Устройство для удержания объектов содержит узлы крепления на космическом аппарате и ракете, причем крепление на ракете осуществляется при помощи замковых устройств в виде стержней, вложенных в матрицы, так что замковые устройства закреплены жестко с ориентацией продольных осей стержней и матриц по направлению разделения ракеты и космического аппарата, а в замковых устройствах между стержнями и матрицами выполнены гарантированные на момент освобождения зазоры. Устройство выполнено в различных вариантах и обеспечивает вместе с реализуемым им способом повышение надежности работы объектов путем повышения надежности их освобождения. 2 н. и 5 з.п.ф-лы, 6 ил.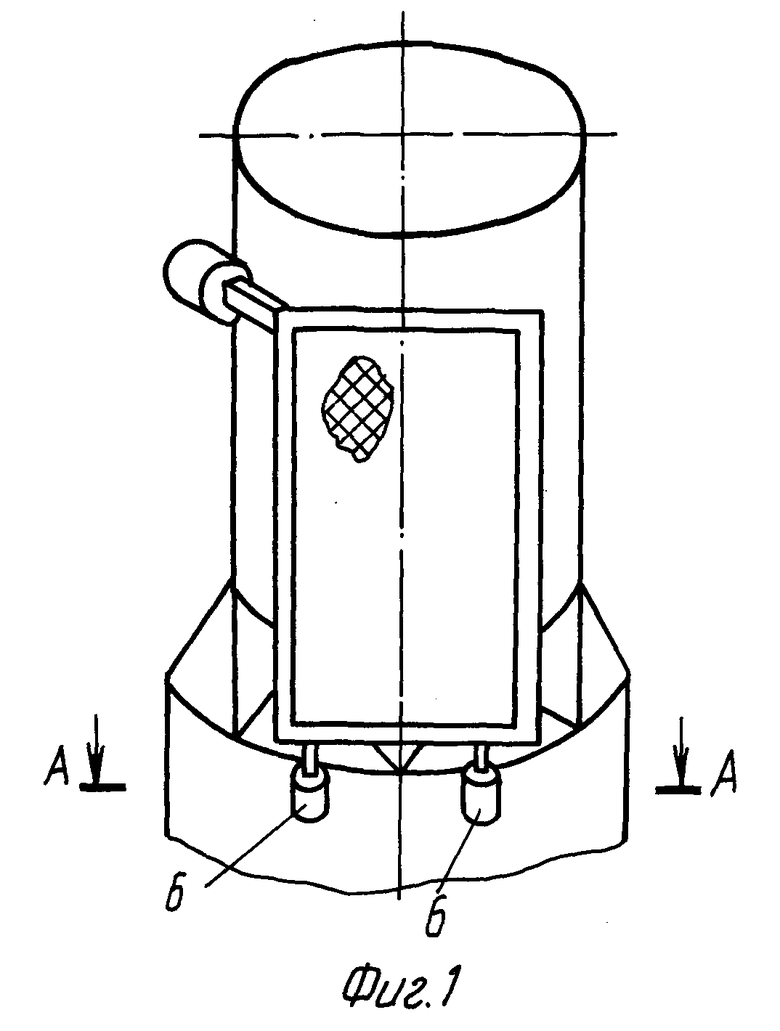
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| В.А.Александров и др | |||
| Ракеты-носители | |||
| / Под общ.ред | |||
| О.С.Осипова | |||
| - М.: Воениздат, 1981, с | |||
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, 3327967 A, 10.05.65 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| JP, N 62-56840, 27.11.87 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |

