Изобретение относится к измерительной технике и может быть использовано для долговременных измерений углов наклона подводных и надводных частей конструкций гидротехнических сооружений.
Известные приборы для измерения наклонов наземных и подводных сооружений не приспособлены для работы под водой (авт. свид. СССР N 127821, кл. G 01 C 9/08, 1959 г.).
Приборы, разработанные специально для исследования наклона объектов под водой, не обеспечивают необходимой точности измерений (авт. свид. СССР N 295975, кл. G 01 C 9/02, 1969 г.).
Известен наклономер, предназначенный для измерения наклонов подводных частей сооружений, содержащий цилиндрический корпус, маятник, упругий измерительный элемент в виде пары гетинаксовых пластин, размещенных симметрично относительно маятника. Верхние концы пластин жестко соединены с корпусом, а нижние - с маятником. На корпусе прибора имеются магнитные присоски и ножки с роликами для прокатывания прибора вдоль металлического шпунта (ЦНИИМФ, труды, Гидротехнические сооружения и морские пути, "Морской транспорт", Л., выпуск 32, 1961, с. 41 - 47).
Наиболее близким по технической сущности к изобретению является датчик углов наклона сооружений, содержащий маятник, упругий элемент с тензорезисторами и герметичный корпус, наполненный демпфирующей жидкостью, упругий элемент выполнен в виде дугообразной плоской пружины, одним концом закрепленной на корпусе, а другим - на длинном плече коромысла, короткое плечо которого посредством серьги шарнирно соединено с плечом маятника, при этом ось коромысла, установленная в подшипниках на корпусе, параллельна оси маятника (авт. свид. СССР N 536392, кл. G 01 C 9/12, 1976 г., прототип).
Однако данный датчик обладает недостаточными чувствительностью и точностью измерения.
Задачей изобретения является повышение чувствительности и точности измерения без увеличения габаритных размеров датчика.
Для этого датчик углов наклона сооружений, содержащий герметический корпус, заполненный демпфирующей жидкостью, маятник, упругий элемент с тензорезисторами, выполненный в виде дугообразной плоской пружины, закрепленной одним концом на корпусе, а другим - на длинном плече коромысла, короткое плечо которого посредством основного плеча основной тяги шарнирно соединено с рычагом маятника, при этом ось основного коромысла, лежащая в подшипниках, установленных в расточках корпуса, параллельна оси подвеса маятника, снабжен дополнительным упругим элементом с тензорезисторами, выполненным в виде дугообразной плоской пружины, дополнительным коромыслом и дополнительной тягой, причем обе тяги - основная и дополнительная выполнены двухплечими, основная тяга дополнительным плечом шарнирно соединена с коротким плечом дополнительного коромысла, а дополнительная тяга, шарнирно установленная на рычаге маятника, шарнирно соединена с основным и дополнительным коромыслами, дополнительный упругий элемент одним концом закреплен на корпусе, а другим - на длинном конце дополнительного коромысла, ось дополнительного коромысла лежит в подшипниках, установленных в расточках корпуса, и параллельна оси подвеса маятника, при этом тензорезисторы включены по мостовой схеме измерения.
Такое выполнение датчика позволяет повысить чувствительность и точность измерения без увеличения габаритных размеров датчика.
На чертеже схематично изображен предложенный датчик углов наклона сооружений, общий вид.
Датчик углов наклона сооружений содержит упругий элемент 1, выполненный в виде дугообразной плоской пружины, одним концом закрепленный на корпусе 2 прибора, а другим - на длинном плече основного коромысла 3, основную тягу 4, маятник 5, ось 6 подвеса которого лежит в подшипниках, установленных в расточках корпуса 2. На внешней и внутренней поверхностях упругого элемента 1 наклеены низкоомные тензорезисторы 7.
Датчик снабжен дополнительным упругим элементом 8, дополнительным коромыслом 9, и дополнительной тягой 10. На внутренней и внешней поверхности дополнительного упругого элемента 8 наклеены низкоомные тензорезисторы 11. Тензорезисторы 7 и 11 включены по мостовой схеме измерения. Основная 3 и дополнительная 10 тяги выполнены двухплечими. Основная тяга 3 дополнительным плечом шарнирно соединена с коротким плечом дополнительного коромысла 9, а дополнительная тяга 10, шарнирно установленная на рычаге 12 маятника 5, шарнирно соединена с основным 3 и дополнительным 9 коромыслами.
Дополнительный упругий элемент 8 одним концом закреплен на корпусе 2, а другим - на длинном конце дополнительного коромысла 9. Ось дополнительного коромысла 9 лежит в подшипниках, установленных в расточках корпуса 2, и параллельна оси маятника 5.
Основной 1 и дополнительный 8 упругие элементы установлены так, что векторы их деформации направлены встречно один другому.
Корпус 2 прибора выполнен герметичным и заполнен трансформаторным маслом. Длина плеч коромысел основного 3 и дополнительного 9 и плеч тяг основной 4 и дополнительной 10 выбирают исходя из заданных пределов измерений угла наклона и точности измерений.
С целью упрощения упругие элементы 1 и 8 выполнены за одно целое, а середина дугообразной плоской пружины защемлена в корпусе 2.
Корпус 2 прибора снабжен сальником 13 для вывода кабеля с герметичным разъемом. Петли 14 служат для закрепления прибора на сооружении. Оси 15 коромысел основного 3 и дополнительного 9 установлены в подшипниках на корпусе 2 и параллельны оси подвеса маятника 5.
Датчик работает следующим образом.
Приборы закладывают в исследуемое сооружение при его строительстве на заданное расстояние один от другого в сторону предполагаемого наклона по высоте сооружения и берут нулевые отсчеты. Начальное положение маятника в момент установки соответствует сжатию упругих элементов 1 и 8. Изменение наклона стенки вызывает поворот маятника 5 относительно корпуса 2 прибора, что через систему рычагов приводит к изменению кривизны упругих элементов 1 и 8 и растяжению или сжатию тензорезисторов 7 и 11. В результате на выходе мостовой схемы измерения появляется электрический сигнал.
Особенностью данного датчика является то, что деформация упругих элементов основного 1 и дополнительного 8 происходит под действием пары сил, действующих на плечи коромысел основного 3 и 9 дополнительного в противоположных направлениях. Это повышает чувствительность и точность датчика. Точность датчика повышается также за счет дифференциальности его действия. Если, например, сооружение вместе с датчиком получит наклон влево, то тензорезисторы 7, закрепленные на внутренней стороне основного упругого элемента 1, будут работать на растяжение, а на стороне основного упругого элемента 1, будут работать на растяжение, а на внешней стороне - на сжатие. На дополнительном упругом элементе 11 наоборот - на внутренней стороне на сжатие, а на внешней - на растяжение. При наклоне сооружения вправо деформация тензорезисторов будет противоположной. Прибор позволяет получить информацию об изменении наклона сооружения по всей высоте стенки до основания вертикальных элементов, находящихся в грунте.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВ НАКЛОНА СООРУЖЕНИЙ | 1994 |
|
RU2114393C1 |
| ДАТЧИК УГЛА НАКЛОНА ОДНОПЛОСКОСТНОЙ | 2006 |
|
RU2344369C2 |
| КУЛИСНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1992 |
|
RU2044939C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2022 |
|
RU2807094C1 |
| КУЛИСНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1994 |
|
RU2084726C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ С ПЕРЕМЕННОЙ ЧАСТОТОЙ | 1994 |
|
RU2085796C1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1996 |
|
RU2110717C1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2110045C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ ДВИЖЕНИЕ | 1998 |
|
RU2139462C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЛЕНТОЧНЫМ ТОРМОЗНЫМ УСТРОЙСТВОМ | 1990 |
|
RU2016285C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения углов наклона гидротехнических сооружений. Датчик содержит два противоположно расположенных упругих элемента, выполненных каждый в виде дугообразной плоской пружины. Один конец каждой пружины закреплен на корпусе прибора, а другой - на длинном плече соответствующих коромысел. Датчик содержит две тяги, шарнирно соединяющие короткие и длинные плечи коромысел с рычагом маятника. На внутренней и внешней сторонах упругих элементов 1 и 8 наклеены низкоомные тензорезисторы, соединенные по мостовой схеме измерения. При отклонении сооружения в ту или другую сторону от вертикали маятник поворачивается от среднего положения и на выходе мостовой схемы измерения появляется электрический сигнал, пропорциональный углу отклонения сооружения. Повышена чувствительность и точность измерения. 1 ил.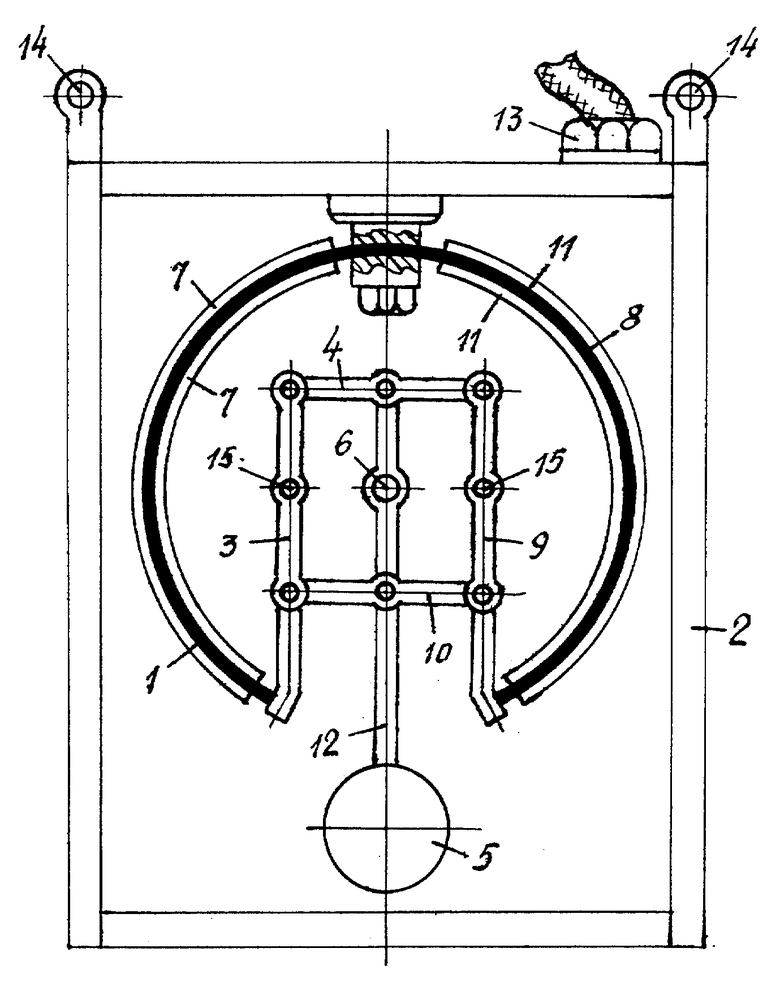
Датчик углов наклона сооружений, содержащий герметичный корпус, заполненный демпфирующей жидкостью, маятник, упругий элемент с тензорезисторами, выполненный в виде дугообразной плоской пружины, закрепленной одним концом на корпусе, а другим - на длинном плече основного коромысла, короткое плечо которого посредством основного плеча основной тяги шарнирно соединено с рычагом маятника, при этом ось основного коромысла, лежащая в подшипниках, установленных в расточках корпуса, параллельна оси подвеса маятника, отличающийся тем, что снабжен дополнительным упругим элементом с тензорезисторами, выполненным в виде дугообразной плоской пружины, дополнительным коромыслом и дополнительной тягой, причем обе тяги - основная и дополнительная выполнена двухплечими, основная тяга дополнительным плечом шарнирно соединена с коротким плечом дополнительного коромысла, а дополнительная тяга, шарнирно установленная на рычаге маятника, шарнирно соединена с основным и дополнительным коромыслами, дополнительный упругий элемент одним концом закреплен на корпусе, а другим - на длинном конце дополнительного коромысла, ось дополнительного коромысла лежит в подшипниках, установленных в расточках корпуса, и параллельна оси подвеса маятника, при этом тензорезисторы включены по мостовой схеме измерения.
| Датчик углов наклона сооружений | 1975 |
|
SU536392A1 |
| КАЯ БИБЛИОТЕКАВ. Л. Меншиков | 0 |
|
SU295975A1 |
| US 3983636 A, 05.10.76. | |||
