Изобретение относится к машиностроению.
Известен механизм управления тормозным устройством, соединяющий рычажную систему с неподвижной опорой, перекидной рычаг, рычаг управления, тягу и регулирующий элемент, выполненный упругим и соединенный одним концом с неподвижной опорой, другим концом посредством подвижного шарнира на перекидном рычаге - с рычажной системой, а с помощью тяги - с рычагом управления .
Недостатками данного механизма являются низкая работоспособность и долговечность, а также повышенное усилие управления. Связано это с тем, что усилие регулирующего элемента, воздействующее на перекидной рычаг, постоянно прижимает его к неподвижной опоре, что приводит при включении-выключении механизма к износу сопрягаемых поверхностей рычага и опоры. Из-за возникновения силы трения между данными поверхностями, момент от которой направлен противоположно моменту усиления регулирующего элемента, происходит уменьшение развиваемой тормозом тормозной момент и повышение усилия управления.
Известен также механизм управления тормозным устройством, который снабжен дополнительной неподвижной опорой с установленным на ней упругим элементом, а перекидной рычаг выполнен с дополнительным плечом, шарнирно соединенным с дополнительным упругим элементом, установленным симметрично основному и симметрично оси перекидного рычага, его жесткость равна жесткости основного упругого элемента.
Однако в известном механизме управляющее усилие снижается недостаточно и по-прежнему сравнительно велико, что затрудняет эксплуатацию механизма.
Цель изобретения - повышение надежности путем снижения управляющего усилия.
Это достигается тем, что механизм управления ленточным тормозным устройством, содержащий рычажную систему с неподвижными опорами, установленные на них и кинематически связанные перекидной рычаг, рычаг, связанный с лентой, рычаг управления, тягу, первый упругий элемент, соединенный одним концом с одной из неподвижных опор, другим концом посредством подвижного шарнира на одном из плеч перекидного рычага - с рычажной системой, а с помощью тяги - с рычагом управления, а также второй упругий элемент одинаковой жесткости, соединенный одним концом с неподвижной опорой, а другим - с вторым плечом перекидного рычага и расположенный симметрично первому упругому элементу относительно оси перекидного рычага, снабжен дополнительными тягой и подвижным шарниром. На неподвижных опорах установлены перекидной рычаг и рычаг управления, расположенные на линии, перпендикулярной линии, соединяющей неподвижные опоры упругих элементов, рычаг управления выполнен с дополнительным плечом, соединенным посредством дополнительного подвижного шарнира с дополнительной тягой, а свободный конец дополнительной тяги соединен с серединой дополнительного плеча перекидного рычага, при этом основная и дополнительная тяги расположены по диагоналям равнобокой трапеции, боковые стороны которой расположены соответственно между серединами плеч перекидного рычага и концами плеч рычага управления.
В варианте механизма рычаг, связанный с тормозной лентой, и первый упругий элемент установлены на одной неподвижной опоре.
Положительный эффект изобретения состоит в повышении надежности благодаря снижению управляющего усилия и упрощению конструкции механизма при одновременном снижении габаритных размеров.
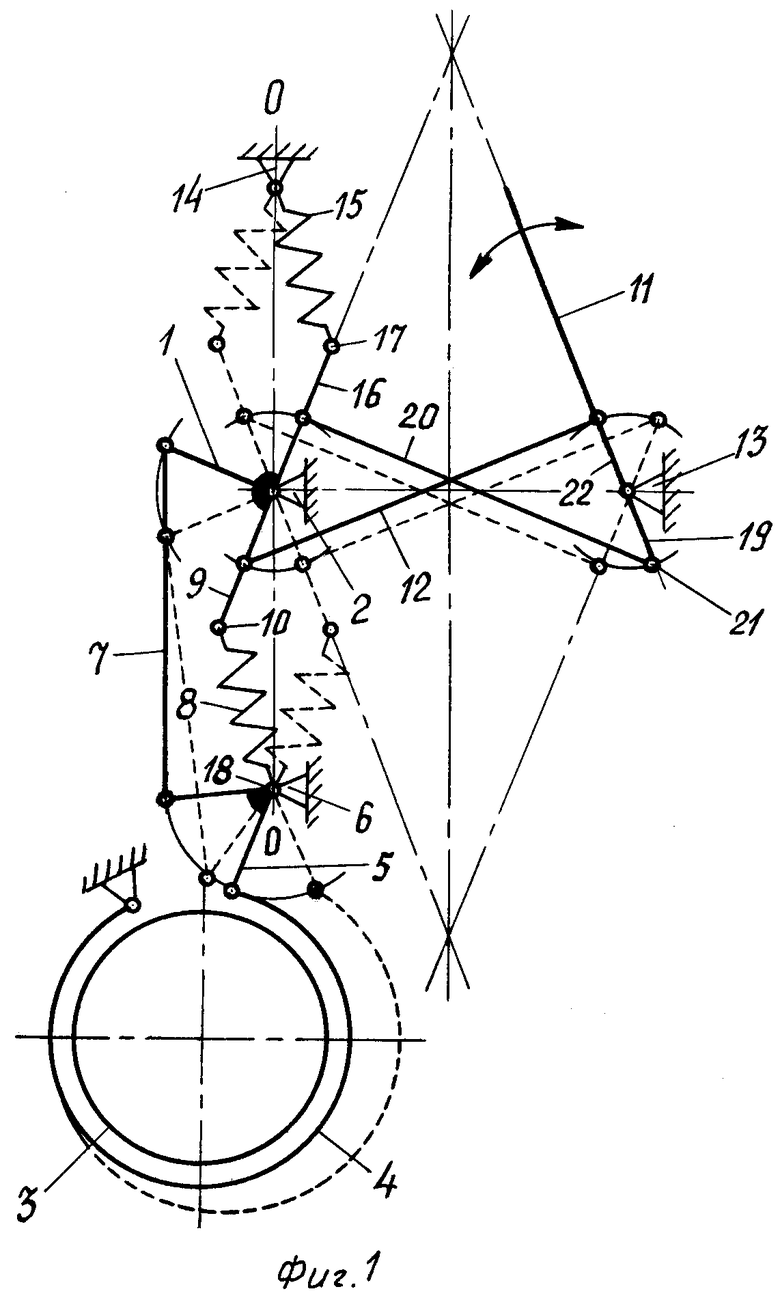
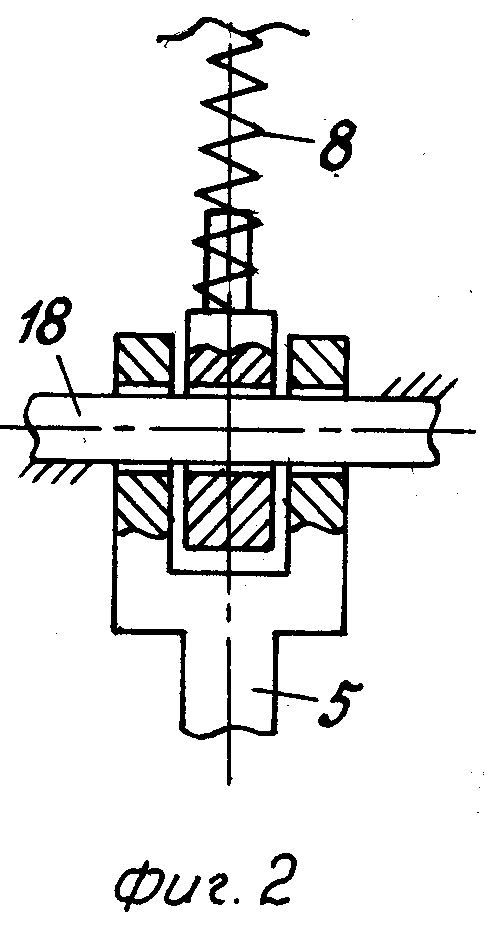
На фиг.1 представлена схема механизма управления тормозным устройством; на фиг.2 - сдвоенный шарнир, продольный разрез.
Механизм содержит перекидной рычаг 1, установленный на неподвижной опоре 2, тормозной барабан 3, тормозную ленту 4, связанную с рычагом 1 посредством рычага 5, установленного на неподвижной опоре 6, и тяги 7, первый упругий элемент 8, установленный на той же неподвижной опоре 6 и связанный с плечом 9 перекидного рычага 1 подвижным шарниром 10, рычаг 11 управления с основной тягой 12, установленный на неподвижной опоре 13. Симметрично первому упругому элементу 8 на неподвижной опоре 14 установлен второй упругий элемент 15, связанный с дополнительным плечом 16 рычага 1 подвижным шарниром 17. Усилия упругих элементов 8 и 15 равны. Рычаг 5 и первый упругий элемент 8 установлены на неподвижной опоре 6 с помощью сдвоенного шарнира 18 (фиг.2).
Рычаг 11 управления снабжен дополнительным плечом 19, а механизм снабжен дополнительной тягой 20. Плечо 19 рычага 11 и тяга 20 соединены между собой подвижным шарниром 21, а другой конец дополнительной тяги 20 шарнирно соединен с серединой дополнительного плеча 16 перекидного рычага 1.
Неподвижные опоры 2 и 13, на которых установлены соответственно перекидной рычаг 1 и рычаг 11 управления, расположены на линии, перпендикулярной линии, соединяющей неподвижные опоры 6 и 14 упругих элементов 8 и 15, при этом основная 12 и дополнительная 20 тяги расположены по диагоналям равнобокой трапеции, боковые стороны которой расположены соответственно между серединами плеч 9 и 16 перекидного рычага 1 и концами плеч 19 и 22 рычага 11 управления. Механизм обладает полной симметрией как во включенном, так и отключенном состоянии.
Механизм работает следующим образом.
За счет приложения внешнего усилия к рычагу 11 управления упругие элементы 8 и 15 переводятся через линию 0-0, в результате чего создается момент на перекидном рычаге 1, затягивающий или отпускающий ленту 4. Так как усилия упругих элементов 8 и 15 противоположно направлены и равны, то они не создают реакцию на рычаг 1 и опору 2, что исключает износ их сопрягаемых поверхностей и тем самым повышает надежность и долговечность механизма.
Благодаря наличию дополнительного плеча 19 у рычага 11 управления и дополнительной тяги 20 момент, поворачивающий перекидной рычаг 1, создается парой сил, что увеличивает КПД механизма и уменьшает усилие управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ УПРАВЛЕНИЯ ЛЕНТОЧНЫМ ТОРМОЗНЫМ УСТРОЙСТВОМ | 1997 |
|
RU2137957C1 |
| Механизм управления тормозным устройством | 1982 |
|
SU1049705A2 |
| КУЛИСНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1992 |
|
RU2044939C1 |
| Механизм управления тормозным устройством | 1980 |
|
SU964306A2 |
| ДАТЧИК УГЛОВ НАКЛОНА СООРУЖЕНИЙ | 1997 |
|
RU2131112C1 |
| КУЛИСНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1994 |
|
RU2084726C1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1996 |
|
RU2110717C1 |
| ГАЗОВЫЙ РЕДУКТОР | 1998 |
|
RU2132509C1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2139495C1 |
| ДАТЧИК УГЛОВ НАКЛОНА СООРУЖЕНИЙ | 1994 |
|
RU2114393C1 |
Использование: в механизмах управления ленточными тормозами. Сущность: механизм управления содержит рычажную систему с неподвижными опорами, установленные на них и кинематически связанные рычаг, связанный с лентой, перекидной рычаг и рычаг управления, неподвижные опоры, на которых установлены последние два рычага, расположены на линии, перпендикулярной линии, соединяющей неподвижные опоры двух упругих элементов. Перекидной рычаг и рычаг управления шарнирно соединены двумя тягами, расположенными по диагоналям равнобокой трапеции, боковые стороны которой расположены соответственно между серединами плеч перекидного рычага и концами плеч рычага управления. Рычаг, связанный с тормозной лентой, установлен на одной неподвижной опоре с первым упругим элементом. 1 з.п. ф-лы, 2 ил.
| Механизм управления тормозным устройством | 1982 |
|
SU1049705A2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
