Изобретение относится к области транспортных средств преимущественно автоматических или дистанционно управляемых.
Известно многокорпусное транспортное средство, корпуса которого соединены тяговыми механизмами сочленения (журнал США "Automotive Industries" v 138, N 9, стр. 59-60), реализующий способ перемещения при котором корпуса поочередно перемещают в направлении движения.
Известен также способ передвижения многокорпусного транспортного средства, заключающийся в том, что перемещение корпусов в направлении движения производят перекатыванием их по опорной поверхности, вращая их в продольных вертикальных плоскостях (патент СССР N 542461 по кл. B 62 D 63/02, 1970) - прототип. Корпуса этого монокорпусного транспортного средства соединены тяговыми механизмами сочленения, снабжены системами управления ими и образованы охватывающими их опорными поверхностями.
Недостатками этого способа и устройства является ограниченная опорная и профильная проходимость, а также сложность конструкции.
Недостатки эти уменьшены тем, что корпуса перемещают поочередно и в параллельных друг другу плоскостях.
Многокорпусное транспортное средство, реализующее предлагаемый способ отличается тем, что боковые стороны корпусов обращены друг к другу.
Механизмы сочленения могут быть выполнены в виде кривошипов, оба конца которых соединены с выходными валами тяговых приводов, причем выходные валы тяговых приводов среднего корпуса выполнены соосными.
Профили опорных поверхностей корпусов могут быть выполнены в виде отрезков прямых, сопряженных криволинейными дугами, через центры кривизны которых проходят оси вращения кривошипов.
Кроме того, транспортное средство может быть снабжено связанными с системой управления датчиками угла поворота кривошипов относительно корпусов и датчиком вертикали.
На фиг. 1 представлена последовательность движений трехкорпусного транспортного средства, реализующего предлагаемый способ движения (вид сверху).
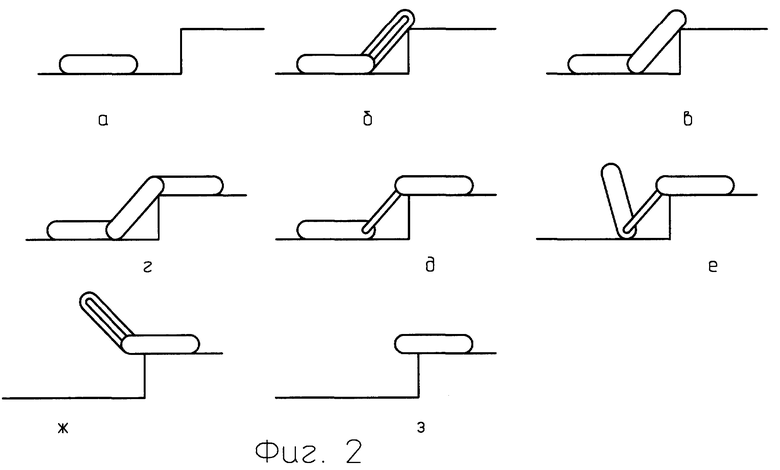
На фиг. 2 представлена последовательность движений предлагаемым способом при преодолении уступа (вид сбоку).
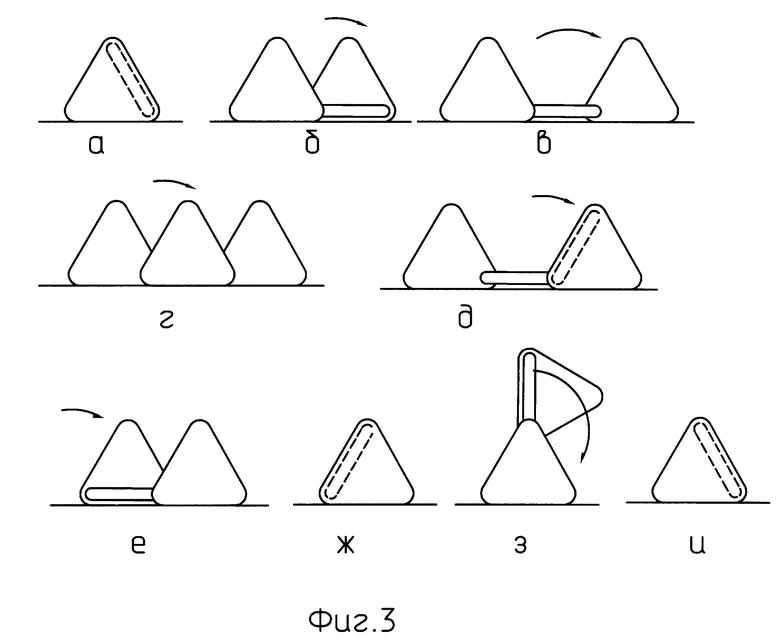
На фиг. 3 представлена последовательность движений, характерная для движения транспортного средства с треугольной формой корпусов (вид сбоку).
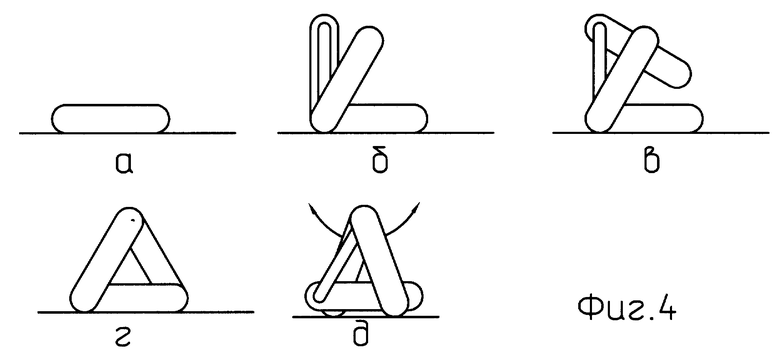
На фиг. 4 представлена последовательность движений транспортного средства при его повороте (вид сбоку).
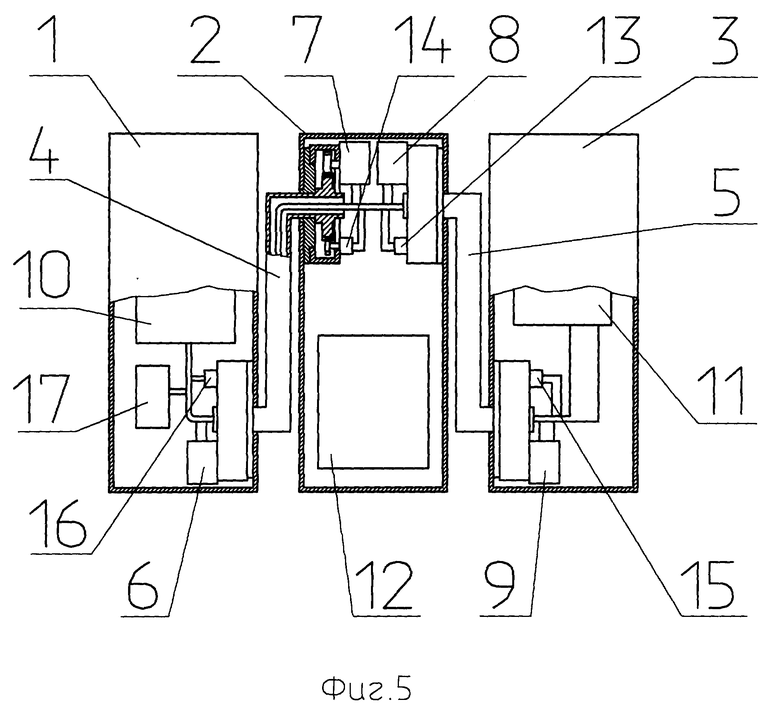
На фиг. 5 представлено трехкорпусное транспортное средство, реализующее предлагаемый способ передвижения (вид сверху).
На фиг. 6 дан вид сверху на четырехкорпусное транспортное средство, реализующее предлагаемый способ.
Предлагаемый способ передвижения рассмотрен на примере трехкорпусного транспортного средства (см. фиг. 1) корпуса 1, 2, 3 которого связаны с помощью двух тяговых механизмов сочленения, состоящих из кривошипов 4, 5 оба конца каждого из которых соединены с выходными валами тяговых приводов 6, 7, 8 и 9. Фаза "а" - исходное положение. Далее осуществляется поочередное перемещение корпусов путем перекатывания их по грунту. Включением привода 7 перемещают корпус 1 (фаза "б") опорная поверхность которого при этом перекатывается по грунту. Далее включением привода 8 перемещают аналогичным образом корпус 3 (фаза "в"). Далее перемещают опять корпус 1, но уже приводом 6 (фаза "г"). Далее - корпус 3 приводом 9 (фаза "д"). Далее перемещают средний корпус 2 одновременным включением приводов 7 и 8 (фаза "е"). И, наконец, возвращают транспортное средство в исходное положение перемещением корпуса 2 за счет одновременного включения приводов 6 и 9, после чего этот цикл может быть повторен неограниченное число раз. За один цикл происходит перемещение транспортного средства на расстояние, равное периметру опорной поверхности корпуса. На фиг. 1 показана одна из возможных походок, но могут быть реализованы и другие.
При перемещении одного из корпусов два (или более) остальных на долю которых приходится 2/3 (или более) общего веса служат противовесом. Это, в частности, позволяет преодолевать препятствия, высота которых соизмерима с габаритами транспортного средства (см. фиг. 2). При этом поворот корпусов в каждой фазе производится не на угол 180 как при движении по плоской поверхности, а на угол больший или меньший этой величины.
В зависимости от конкретной конструкции транспортного средства последовательность и характер движений могут быть различны. Так для транспортного средства с тремя треугольными корпусами и схемой аналогичной представленной на фиг. 1 перемещение среднего корпуса производится с отрывом от грунта (см. фиг. 3, фаза "з").
Поворот осуществляется за счет вращения крайних корпусов в противоположные стороны (см. фиг. 4). При этом крайние корпуса предварительно устанавливаются в исходное для поворота положение (фазы "а", "б", "в" и "г") после чего включением соответствующих приводов крайние корпуса вращают во встречных направлениях. При этом средний корпус (или средние корпуса для более чем трехкорпусного транспортного средства) вывешивается и происходит поворот на некоторый угол.
Транспортное средство, реализующее предлагаемый способ (см. фиг. 5) может состоять из трех корпусов 1, 2 и 3, соединенных тяговыми механизмами сочленения. Наиболее простой реализацией этих механизмов являются кривошипы 4 и 5 оба конца каждого из которых соединены с выходными валами тяговых приводов 6, 7, 8 и 9. Выходные валы тяговых приводов среднего корпуса выполнены соосными. Транспортное средство также снабжено системой управления 10 и источником питания 11. Полезная нагрузка 12, например научная аппаратура, может быть размещена в среднем корпусе. Кроме того, устройство может быть снабжено датчиками угла поворота кривошипов 13, 14, 15 и 16 и датчиком вертикали, связанными с системой управления, что позволяет автоматизировать процесс движения.
Наиболее приемлемым профилем опорных поверхностей корпусов является овальный, представляющий собой дуги окружности, сопряженные отрезками прямых.
Предлагаемое устройство многокорпусного транспортного средства, боковые поверхности корпусов которого обращены друг к другу, может быть осуществлено, при этом способ его перемещения, заключающийся в поочередном перемещении корпусов в параллельных друг другу плоскостях позволит существенно повысить проходимость. Высота преодолеваемых транспортным средством препятствий может быть равной длине корпусов (и даже большей). Кроме того, низкое удельное давление на грунт и отсутствие пробуксовывания движителей, которыми здесь фактически являются корпуса, способствуют повышению опорно-тяговой проходимости.
Экспериментальный подвижный макет, реализующий предлагаемый способ движения был испытан на грунтах с различным рельефом и несущей способностью. Испытания подтвердили более высокую относительную (приведенную к габаритам) проходимость макета по сравнению с известными транспортными средствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1997 |
|
RU2178752C2 |
| ТОКОПРИЕМНИК РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2188136C2 |
| СПОСОБ ПОВЫШЕНИЯ ПОДВИЖНОСТИ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА НА ГРУНТАХ С ВЫСОКОЙ АДГЕЗИЕЙ И САМОХОДНОЕ ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2028242C1 |
| УСТРОЙСТВО ДЛЯ САМОВЫТАСКИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2551295C1 |
| СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1994 |
|
RU2092364C1 |
| ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2188352C2 |
| ДВУХОСНОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2198107C2 |
| СИСТЕМА КРЕПЛЕНИЯ БОРТОВОГО МНОГОЗВЕННОГО МАНИПУЛЯТОРА КОСМИЧЕСКОГО АППАРАТА | 1994 |
|
RU2086480C1 |
| СОЧЛЕНЕННОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2022859C1 |
| ТРЕХОСНОЕ ПОЛНОПРИВОДНОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО ПЕРЕМЕЩЕНИЯ ПО ПРЕПЯТСТВИЯМ | 1990 |
|
RU2022860C1 |
Способ основан на перемещении каждого из корпусов (1-3)многокорпусного транспортного средства в направлении движения путем перекатывания по опорной поверхности в продольной вертикальной плоскости, причем корпуса перемещают поочередно в параллельных друг другу вертикальных плоскостях так, что боковые поверхности смежных корпусов обращены друг к другу. Многокорпусное транспортное средство содержит несколько корпусов, каждый из которых выполнен с охватывающими корпус опорньми поверхностями, тяговые механизмы сочленения корпусов между собой и систему управления. Одна из боковых сторон каждого корпуса обращена к смежной боковой стороне одного из остальных корпусов. Тяговые механизмы сочленения корпусов между собой выполнены в виде кривошипов, концы каждого из которых соединены с выходными валами тяговых приводов смежных корпусов. Профиль опорной поверхности каждого корпуса выполнен в виде отрезков прямых, сопряженных криволинейными дугами, в центрах кривизны одной из которых расположена ось вращения кривошипа. Выходные валы тяговых приводов каждого корпуса, расположенного между крайними корпусами, выполнены соосными. Изобретение позволяет повысить проходимость дистанционно управляемых транспортных средств. 2 с. и 5 з.п.ф-лы, 6 ил.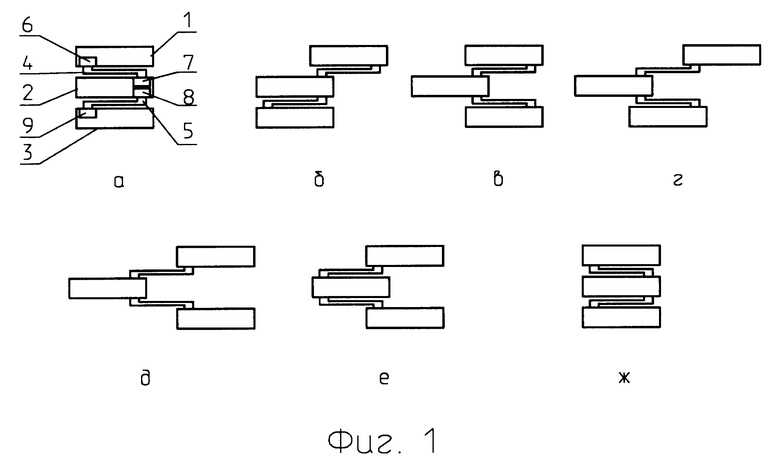
| SU, 0542461 А, 05.01.77 | |||
| GB, 2192846 А, 27.01.88 | |||
| WO, 94/25329 А1,10.11.94. |
