Изобретение относится к опорным устройствам токосъемников электрического транспорта, в частности электроподвижного состава скоростных поездов.
Известны токоприемники с прямолинейно-направляющим механизмом [1]. Он состоит из двуплечего рычага, на верхнем конце которого установлен токооъемный узел, а нижний конец сочленен с качающимся рычагом, закрепленным на основании. Средняя часть рычага соединена с тягой, шарнирно закрепленной на основании. Пружина соединяет место сочленения двуплечего и качающего рычагов с основанием. Параметры рычагов подобраны так, чтобы обеспечить постоянство контактного давления токосъемного узла на контактный провод и минимальную массу звеньев токоприемника.
Недостаток устройства заключается в недостаточной равномерности прижатия токосъемного узла к контактному проводу на всем рабочем ходу.
Известны конструкции токоприемников фирмы Dornier - Sistem GmbH, выполненные по схеме полупантографа [2].
Механическая часть выполнена аналогично вышеупомянутой, а привод подъема и опускания полупантографа - пневматический.
Равномерность прижатия токосъемного узла к контактному проводу повышена тем, что точно дозируют усилия пневмопривода на несущие части полупантографа.
Известны конструкции токоприемников для рельсовых транспортных средств фирмы Faiveley Transport [3, 4].
Обе конструкции аналогичны. Рассмотрим, например, патент Франции N 2680143, который может быть принят в качестве прототипа.
На фиг. 1 патента представлена схема токоприемника. Он состоит из токосъемного узла, установленного на верхнем несущем звене полупантографа, сочлененного с нижним несущим звеном, установленным шарнирно на изолированном основании, и связанного с пружинной системой подрессоривания. Верхние и нижние тяги вместе с верхним и нижним несущими звеньями, соединенные определенным образом, образуют полупантограф, обеспечивающий вместе с системой подрессоривания равномерность прижатия полозьев токосъемника к контактному проводу и их постоянное положение в горизонтальной плоскости. Регулирование усилия прижатия производится с помощью пневмопривода, шток которого воздействует на нижнее несущее звено полупантографа.
Недостаток устройства состоит в необходимости наличия пружины большой энергоемкости и большого хода для обеспечения необходимого усилия прижатия токосъемного узла к контактному проводу, а также потребность в источнике сжатого воздуха.
Несмотря на свои недостатки патент Франции N2680143 по своей технической сущности наиболее близок к предлагаемому устройству.
Задачей, решаемой предлагаемым устройством, является устранение указанных недостатков, а также снижение энергопотребления и мощности привода подъемно-опускающего механизма.
Поставленная задача решается в новой конструкции следующим образом. В токоприемнике, содержащем токосъемный узел, установленный на полупантографе, состоящем из нижнего и верхнего сочлененных несущих звеньев, установленном шарнирно на изолированном основании и снабженном системой подрессоривания с упругими элементами и подъемно-опускающим механизмом с приводом, упругие элементы системы подрессоривания выполнены в виде торсионов, расположенных внутри полого основания, свободные концы каждого из которых связаны через кинематическую передачу с нижним несущим звеном полупантографа, а противоположные концы жестко заделаны в основании, кроме одного, который соединен с валом привода подъемно-опускающего механизма. При этом кинематическая передача каждого торсиона выполнена в виде кривошипа, установленного на свободном конце торсиона и соединенного через вертикальную тягу с малым плечом двуплечего рычага, большое плечо которого, соединенное тягой с нижним несущим звеном полупантографа, образует с ним трапециевидный механизм. Энергоемкость торсионов, соединенных с основанием, составляет часть требуемой на преодоление сил сопротивления по подъему его подвижных частей. Привод подъемно-опускающего механизма выполнен электромеханическим и муфтой-изолятором связан со свободным концом одного из торсионов системы подрессоривания.
На фиг.1 представлен общий вид токоприемника. Токоприемник содержит токосъемный узел 1, установленный на полупантографе, состоящем из нижнего и верхнего сочлененных несущих звеньев 2 и 3 и нижней и верхней тяг 4 и 5.
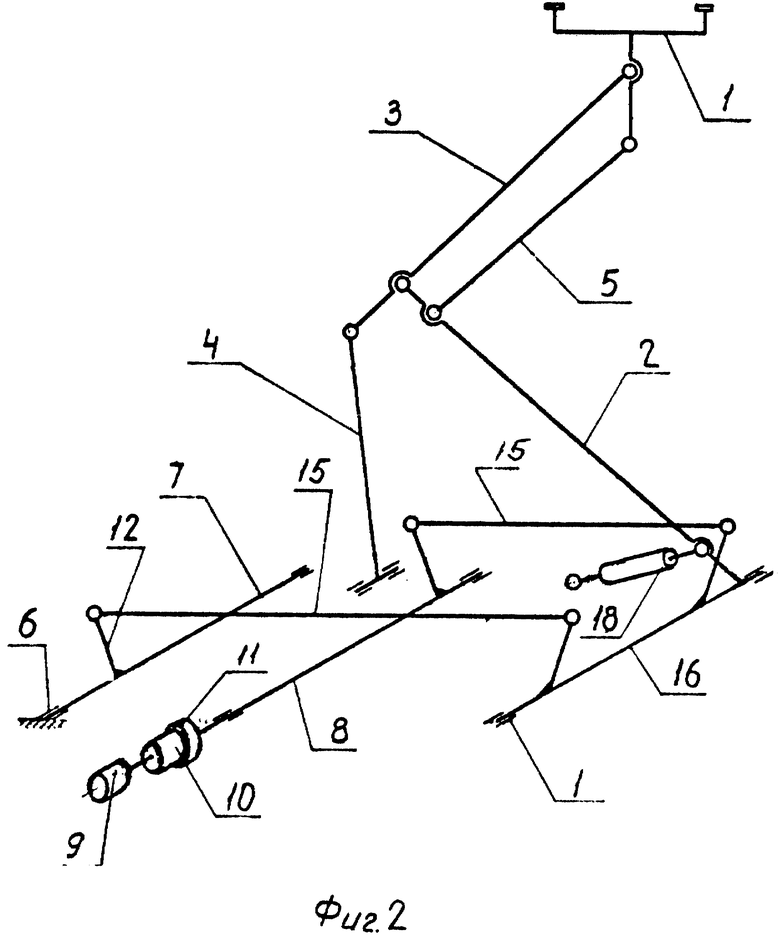
Полупантограф установлен на изолированном полом основании 6 и снабжен системой подрессоривания с несколькими упругими элементами, в частности с двумя торсионами 7 и 8, соединенными кинематической передачей с нижним несущим звеном 2. Причем противоположный конец торсиона 7 жестко заделан в основание, а противоположный конец торсиона 8 соединен с валом электропривода 9 подъемно-опускающего механизма 10 через муфту-изолятор 11. При этом энергоемкость торсиона 7, при положении токоприемника в сложенном нижнем положении составляет часть (порядка 80%) от необходимой для преодоления сил сопротивления по подъему его подвижных элементов в крайнее верхнее положение. При этом торсионы 7, 8 могут быть расположены как параллельно так и перпендикулярно главному валу 16. Разница будет заключаться в схеме кинематической передачи. Так, например, если торсионы расположены параллельно главному валу, то кинематическая передача каждого из них выполнена в виде кривошипа 12, установленного на свободном конце торсиона, соединенного тягой 15 с кривошипом главного вала 16 (фиг.2). А если торсионы расположены перпендикулярно главному валу 16, кинематическая передача каждого из них выполнена в виде кривошипа 12, установленного на свободном конце торсиона, соединенного через вертикальную тягу 13 с малым плечом двуплечего рычага 14, большое плечо которого соединено тягой 15 с кривошипом главного вала 16 (фиг.1).
В крайнем нижнем положении полупантограф фиксируется запирающим устройством 17, колебания токоприемника гасятся демпфером 18.
Токоприемник работает следующим образом. В сложенном состоянии полупантограф фиксируется запирающим устройством 17. Торсион 7 закручен на максимальный угол и воспринимает часть веса всех звеньев токоприемника. Торсион 8, соединенный с электроприводом 9, не нагружен или предварительно нагружен небольшим моментом от веса этих же звеньев.
Для приведения токосъемника в рабочее состояние открывают запирающее устройство 17. При этом полупантограф остается в сложенном состоянии, т.к. энергии, запасенной в торсионах, недостаточно для его подъема. Включая привод 9, закручивают торсион 8 до тех пор, пока он не наберет необходимое количество энергии для преодоления сил сопротивления подъему пантографа, т.е. недостающие 20%. С этого момента все торсионы работают совместно и поднимают полупантограф до соприкосновения с контактным проводом. Кроме того, привод 9 добавляет энергию торсиону 8 для обеспечения требуемого усилия прижатия полоза токосъемного узла 1 к контактному проводу, выключается и в дальнейшем в работе не участвует. Динамический ход токоприемника, т.е. его вертикальные колебания, обеспечивается совместной работой всех торсионов и демпфера 18. Привод 9 включается только тогда, когда требуется повысить усилие нажатия токосъемного узла 1 на контактный провод.
Опускание токосъемника происходит или путем разблокировки привода 9 и торсиона 8, или включением привода 9 в обратную сторону. При этом полупантограф складывается под собственным весом и фиксируется запирающим устройством 17.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ ИНФОРМАЦИИ
1. Патент Германии N 810516, 1949г., фиг.4.
2. Проспект фирмы Dornier-System GmbH.
3. Заявка Европейского патентного ведомства N 0449 704 А1, 1991г.
4. Патент Франции N 2680143, 1991г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОКОПРИЕМНИК РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО ТРАМВАЯ | 2005 |
|
RU2297340C1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОЕЗДОВ | 2004 |
|
RU2272720C1 |
| ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2368513C1 |
| ТРАМВАЙНЫЙ ВАГОН С ПОНИЖЕННЫМ УРОВНЕМ ПОЛА | 2005 |
|
RU2302956C1 |
| ТОКОПРИЁМНИК ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2800163C1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2194629C2 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2009 |
|
RU2428327C1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2194631C2 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1997 |
|
RU2178752C2 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРИЧЕСКОГО ПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2194630C2 |
Изобретение относится к устройствам токоприемников электрического транспорта, в частности электроподвижного состава скоростных поездов. Токоприемник содержит токосъемный узел, установленный на полупантографе. Нижнее и верхнее сочлененные несущие звенья шарнирно закреплены на главном валу. Полупантограф расположен на изолированном основании и снабжен системой подрессоривания. Упругие элементы системы подрессоривания выполнены в виде торсионов, расположенных внутри полого основания. Свободные концы каждого из них связаны через кинематическую передачу с нижним несущим звеном полупантографа, а противоположные концы жестко заделаны в основание, противоположный конец одного из торсионов соединен с валом привода подъемно-опускающего механизма. Технический результат - снижение энергопотребления и мощности привода подъемно-опускающего средства. 4 з.п. ф-лы, 2 ил.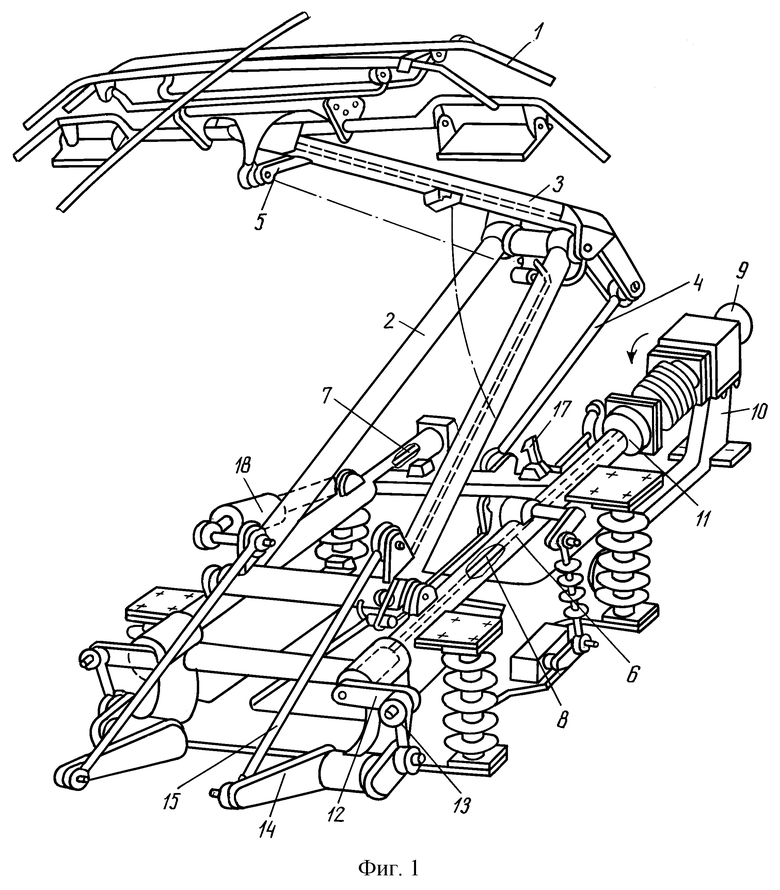
| СПОСОБ ГЕНЕРАЦИИ ШИРОКОПОЛОСНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ С ВЫСОКОЙ ЯРКОСТЬЮ | 2016 |
|
RU2680143C2 |
| RU 93005803 A1, 01.02.1993 | |||
| ТОКОПРИЕМНОЕ УСТРОЙСТВО | 1991 |
|
RU2023603C1 |
| ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025315C1 |
| DE 3043709 A1, 26.11.1981 | |||
| RU 2051812 C1, 10.01.1996. | |||

