Изобретение относится к области измерительной техники, конкретно к той ее части, которая занимается вопросами измерения линейных ускорений подвижных объектов: самолетов, ракет, космических аппаратов и других транспортных средств.
Широко известны способы измерения линейных ускорений, реализованных в маятниковых акселерометрах [1, 2], заключающиеся в преобразовании ускорения в отклонении чувствительной массы на определенный угол, пропорциональный измеряемому ускорению, с последующим преобразованием отклонения в электрический сигнал.
Наиболее близким по технической сущности к заявляемому изобретению следует считать способ измерения линейного ускорения, реализованный в электрическом акселерометре, заключающийся в преобразовании ускорения в угловое отклонение инерционного элемента относительно корпуса с последующим преобразованием отклонения в электрический сигнал [3].
Среди известных электрических акселерометров наиболее близким является акселерометр, содержащий две стеклянные пластины с напыленными на них неподвижными обкладками конденсатора и токопроводами к ним, инерционный элемент из кремния, расположенный между стеклянными пластинами и состоящий из опорного элемента и подвижной емкостной пластины, соединенной с опорным элементом упругими перемычками с токоподводами [4].
Особенностью электростатического акселерометра с упругим подвесом подвижной пластины является то, что он имеет как бы два взаимосвязанных чувствительных элемента (ЧЭ) - механический и электрический. В механическом ЧЭ жесткость упругих перемычек должна соответствовать противоречивым требованиям: заданному диапазону измерительного ускорения и заданной чувствительности акселерометра. Чем выше чувствительность, тем меньше диапазон измерений, так как чувствительность, кроме того, зависит от разрешающей способности дифференциального конденсатора, которая ограничена расстоянием между его обкладками. Расстояние между обкладками конденсатора должно быть таким, чтобы при действии максимального ускорения подвижная пластина отклонилась бы на определенный угол нейтрального положения и, при этом, не касалась неподвижных пластин на определенном минимальном расстоянии, гарантирующем отсутствие пробоя конденсатора и касание пластин.
Таким образом, в известных электростатических акселерометрах имеет место строгое соответствие между заданным диапазоном измеряемых ускорений, которому соответствует определенная чувствительность. Поэтому недостатком известных способов, реализованных в маятниковых электростатических акселерометрах, является ограниченная чувствительность при заданном диапазоне измерения ускорений.
Цель изобретения - повышение чувствительности преобразования отклонения чувствительной массы в электрический сигнал при заданном диапазоне измерения ускорения.
Эта цель достигается тем, что вводят дополнительный аналогичный инерционный элемент и его угловое отклонение относительно инерционного элемента и линейное отклонение относительно корпуса преобразуют в электрический сигнал.
В предлагаемом устройстве указанная цель достигается тем, что подвижная емкостная пластина разделена на две части с образованием сквозных щелей между частями пластины, связанными между собой упругими перемычками и токоподводами, причем центры масс частей пластины в исходном положении совпадают, а массы m1 и m2 частей пластины и коэффициенты жесткости K1 и K2 их упругих перемычек удовлетворяют равенству:
(m1+m2)l1/m2l2 =K1/K2,
где l1 и l2 - расстояние от центра масс до мест крепления частей пластины.
Устройство для измерения линейного ускорения содержит чувствительный элемент и электронную схему к нему.
Внешний вид чувствительного элемента показан на фиг. 1, а принципиальная схема устройства - на фиг. 2, причем на фиг. 1 представлены вид сбоку без боковой стенки и вид сверху без верхней пластины.
Чувствительный элемент содержит корпус в составе двух стеклянных пластин 1 (верхней и нижней) с напыленными на них неподвижными обкладками и токоподводами к ним, инерционный элемент из кремния, расположенный между стеклянными пластинами на расстоянии δo и состоящий из опорных элементов 2 и двух подвижных емкостных пластин 3 и 4, соединенных с опорными элементами 2 и между собой упругими перемычками 5 и 6, что создает свободу отклонения пластины 4 относительно пластины 3 и стеклянных пластин 1 за счет наличия вытравленных сквозных щелей 7.
Расстояние между подвижными и неподвижными пластинами δo = δw+Δδ обеспечивает измерение заданного диапазона ускорений δw некоторой гарантией (Δδ), позволяющей исключить соприкосновение и подвижных и неподвижных пластин.
Неподвижные пластины 1 и подвижные пластины 3 и 4 образуют дифференциальных конденсатор, обладающий емкостями C1 и C2. В исходном положении емкости равны C1= C2=C0. При отклонении пластин величина емкости перераспределяется между ними C1 ≠ C2.
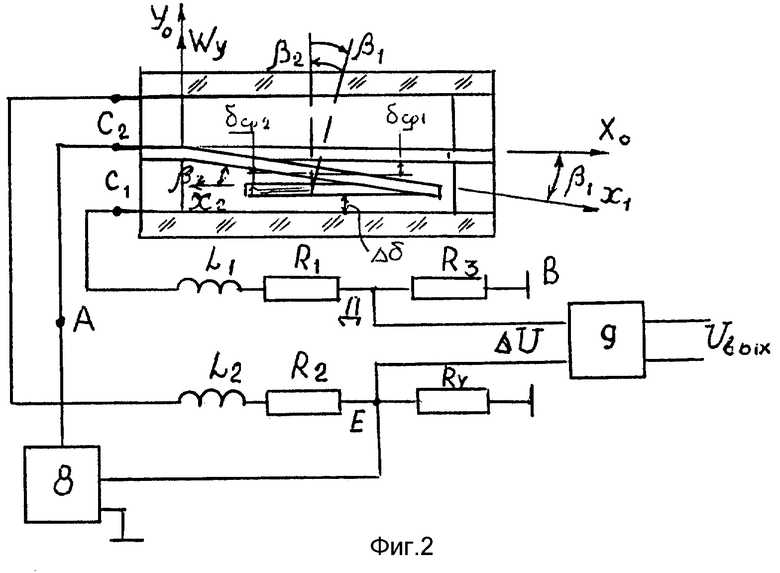
На фиг. 2 приведена схема устройства, реализующего способ измерения линейного ускорения. Устройство содержит, кроме чувствительного элемента с его деталями 1 - 7, генератор 8 синусоидального напряжения, мост, два плеча которого составляют последовательные резонансные контуры, составленные из указанных емкостных датчиков C1 и C2, а также индуктивных элементов L1 и L2 и резисторов R1-R2. Генератор 8 синусоидального напряжения подключен своим выходом к диагонали моста, обозначенной буквами A и B. К резистору R4 подключен вход генератора 8 так, чтобы обеспечить положительную обратную связь генератора через ветвь моста, содержащую емкостный датчик C2, индуктивный элемент L2 и резистор R2. Напряжение разбаланса моста снимается с диагонали D-E на вход дифференциального усилителя 9.
Измерение ускорений производится следующим образом. При отсутствии ускорения подвижные пластины 3 и 4 сохраняют свое симметричное положение относительно обкладок 1, центры масс этих пластин совпадает с точкой 0, емкости датчиков C1= C2= C0 перемещения будут равны между собой и напряжение в диагонали D-E и на выходе усилителя 9 равно нулю.
При действии ускорения w к центру масс пластины 3 и связанной с ней пластиной 4 будет приложен момент (m1+m2)l1w, который уравновешивается моментом жесткости K1β1 упругих перемычек 5. Указанные пластины отклоняется от исходного положения, причем пластина 3 отклоняется на угол β1. Одновременно к центру масс пластины 4 будет приложен момент m2l2w, который уравновешивается моментом жесткости K2β2 упругих перемычек 6 и вторая пластина отклонится на угол β2 от положения пластины 3 в другую сторону.
Отклонение подвижных пластин приведет к изменению расстояния между ними и неподвижными пластинами, а это, в свою очередь, вызовет изменение емкости емкостных датчиков C1 и C2. Емкости емкостных датчиков C1 и C2 изменяются так, что одна из них увеличивается, а другая уменьшается на величину ΔC относительно емкости C0 в исходном положении.
Частота генератора 8 устанавливается так, что она совпадает с собственной частотой колебательного контура одной из ветвей моста, состоящей из емкостного датчика C1, индуктивного элемента L1, резисторов R1 и R3. В устройстве настройка генератора 8 в резонанс с колебательным контуром обеспечивается положительной обратной связью по току колебательного контура через резистор R4. Другая ветвь моста оказывается на склоне резонансной частотой характеристики. Такая расстройка второго контура наряду с разбалансировкой моста от изменения емкостей емкостных датчиков C1 и C2 обеспечивает более высокое напряжение разбаланса моста, характеризующее величину измеряемого ускорения. Это напряжение усиливается дифференциальным усилителем 9 и на его выходе появится напряжение Uвых, пропорциональное измеряемому ускорению w.
Для случая равенства емкостей емкостных датчиков C1 и C2 и их изменения при действии ускорения напряжения разбаланса моста в диагонали D-E и на выходе усилителя 9 определяются выражениями [3]
где  - статический коэффициент передачи или чувствительность электростатического акселерометра;
- статический коэффициент передачи или чувствительность электростатического акселерометра;
ΔU - напряжение разбаланса в диагонали моста;
Uг - напряжение на выходе генератора синусоидального напряжения;
Q - добротность последовательного резонансного контура;
C0 - емкость каждого плеча датчика в исходном положении;
ΔC - изменение емкостей под действием ускорения;
Kу - коэффициент усиления усилителя;
Uвых - напряжение на выходе усилителя.
Приведенные выражения (1) отражают электростатическое преобразование перемещения чувствительных масс в предлагаемом акселерометре. Для получения полной математической модели были использованы известные уравнения и передаточные функции маятникового акселерометра, работающего по разомкнутой схеме [1, с. 8, 9] . Это позволило для установившегося режима при ускорении w ≠ 0 составить равенства, соответствующие положению равновесия первой подвижной пластины относительно корпуса
(m1+m2)l1w = K1β1 (2)
и второй подвижной пластины относительно первой
m2l2w = K2β2 (3)
где m1, m2 - массы подвижных пластин;
l1, l2 - расстояния от мест закрепления упругих перемычек до центра масс пластин;
K1, K2 - коэффициенты угловой жесткости при отклонении пластин на углы β1, β2, вследствие действия ускорения w.
Чувствительность акселерометра определяют при максимальном ускорении wmax /1/, когда подвижные пластины отклоняются на максимальные углы β1max и β2max, что соответствует перемещению центров масс этих пластин на расстояния (см. фиг. 1) δ1 и δ2, которые связаны с величинами углов β1max и β2max, приближенными соотношениями
β1max = δ1/l1, β2max = δ2/l2. (4)
Подставляя полученные выражения в равенство (2) и (3), получим (5)
(5) (6)
(6)
При измерении одного и того же ускорения wmax ЧЭ акселерометра должен обладать свойствами и связями, которые соответствуют равенству, получаемому из выражений (5) и (6).
 (7)
(7)
при равных углах отклонения пластин β1max = β2max = βmax.
Равенство (7) позволяет обеспечить заданные характеристики (массы, коэффициенты жесткости и углы отклонения), соответствующие заданному диапазону измерения ускорения ±wmax и отклонениям подвижных пластин.
Указанными отклонениями определяют и величины емкостей входящие в выражение (1). Действительно, при максимальном ускорении центры массы первой и второй подвижных пластин (см. фиг. 2) будут находиться от ближайшей неподвижной пластины на расстояниях δср1 = δ0-δ1 = δ2+Δδ и δср2 = δ0-(δ1+δ2) = Δδ соответственно. Для этого случая относительное приращение емкости будет иметь вид
где C1 = ε0S1/δср1+ε0S2/δср2 - суммарная емкость датчика при максимальном отклонении подвижных пластин;
C0 = εS1/δ0+εS2/δ0 - суммарная емкость датчика при исходном положении пластин;
ε0 - диэлектрическая проницаемость воздуха;
ε - диэлектрическая проницаемость диэлектрика;
S1 и S2 - площади первой и второй подвижных пластин; расстояния между первой и второй подвижными и неподвижной пластинами в исходном (при w=0) и отклоненном положении подвижных пластин (при w ≠ wmax )
расстояния между первой и второй подвижными и неподвижной пластинами в исходном (при w=0) и отклоненном положении подвижных пластин (при w ≠ wmax )
Для оценки ожидаемого увеличения чувствительности положим, что уравнения (1) и (3) соответствует известному устройству с массой m*=m1+m2 и площадью подвижной пластины S*=S1+S2, где S1, S2 - площади первой и второй подвижных пластин. При равных площадях подвижных пластин, S1=S2=S, получим
Для прототипа, у которого площадь подвижной пластины равна S*=2S и расположена на расстояниях
от неподвижной, получим
Если величины расстояний одинаковые и при прочих равных условиях сравнение чувствительности предлагаемого акселерометра с известным можно выполнить, взяв отношение полученных выражений (9) и (10):
Для указанных акселерометров при заданных значениях: δw = 200 мкм, Δδ = 10 мкм имеем увеличение чувствительности, приблизительно в 23 раза. Этим и определяется практическая ценность предложенного способа и устройства для измерения линейного ускорения.
Источники информации
1. Коновалов и др. Гироскопические системы ЧЗ. (Акселерометры, датчики угловой скорости и др.) М.: Высшая школа, 1980, с. 4 - 7.
2. Синельников. Низкочастотные линейные акселерометры. Методы и средства поверки и градуировки. М: Изд-во стандартов, 1979, с. 8, 11, 15.
3. "Способ измерения ускорения и устройство для его осуществления". Патент РФ N 1492290 от 4.4.87. (Авторы: Евневич Б.И., Крячко В.М., Семенова Н.Г.)
4. "Электростатический акселерометр". Патент SU N 1811611, МКИ G 01 P 15/08.
Способ и устройство предназначены для использования в области измерительной техники. Преобразуют ускорение в угловое отклонение инерционного элемента относительно корпуса. Отклонение преобразуют в электрический сигнал. Вводят дополнительный аналогичный инерционный элемент и его угловое отклонение относительно первого инерционного элемента и линейное отклонение относительно корпуса преобразуют в электрический сигнал. Чувствительный элемент содержит две стеклянные пластины с напыленными на них неподвижными обкладками конденсатора и токоподводами к ним. Инерционный элемент из кремния расположен между стеклянными пластинами и состоит из опорного элемента и подвижной емкостной пластины, соединенной с опорным элементом упругими перемычками с токоподводами. Подвижная емкостная пластина разделена на две части с образованием сквозных щелей между частями пластины, связанными между собой упругими перемычками и токоподводами. Центры масс частей пластины в исходном положении совпадают, m1 и m2 частей пластины и коэффициенты жесткости К1 и К2 их упругих перемычек удовлетворяют равенству:
(m1+m2)l1/m2l2 = K1/K2,
где l1 и l2 - расстояние от центра масс до мест крепления частей пластины.
Обеспечивается повышение чувствительности преобразования отклонения чувствительной массы в электрический сигнал. 2 c.п.ф-лы, 2 ил.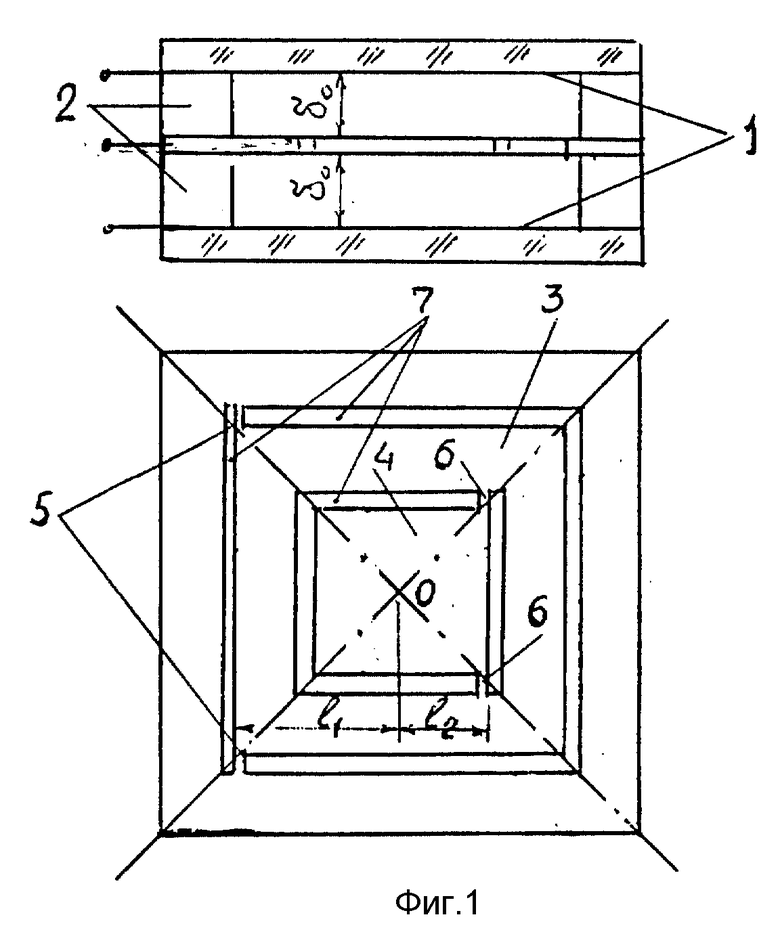
(m1 + m2)l1/m2l2 = K1/K2,
где l1 и l2 - расстояния от центра масс до мест крепления частей пластины.
| Электростатический акселерометр | 1991 |
|
SU1811611A3 |
| US 5375469 A, 27.12.94 | |||
| УСТРОЙСТВО, СИСТЕМЫ И СПОСОБЫ ИСПОЛЬЗОВАНИЯ УДЕРЖИВАЕМЫХ РУКОЙ ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ ДЛЯ СОЗДАНИЯ УПАКОВКИ ПО ТРЕБОВАНИЮ | 2011 |
|
RU2585474C2 |
| DE 3223987 A1, 20.01.83 | |||
| ПЛАСТИНА МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 1995 |
|
RU2087917C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ АКСЕЛЕРОМЕТРА | 1994 |
|
RU2047863C1 |
