Предложенное изобретение относится к области измерительной техники, в частности, к измерителям угловой скорости, линейного и углового ускорения.
Угловые акселерометры на ПАВ измеряют угловое ускорение. При вычислении по результатам его ускорений угловой скорости (интегрирование углового ускорения по времени) погрешности прибора накапливаются с течением времени вследствие интегрирования выходного сигнала. Пьезоэлектрический виброгироскоп [1 - 4] и гироскоп на ПАВ обладают общими недостатками - большими массой и габаритами вследствие необходимости их оснащения двигателями, высокой сложностью вследствие необходимости их оснащения токоподводами и токосъемами вращения, что сводит на нет основные преимущества ПАВ-датчиков перед другими измерителями угловой скорости. ДУС (датчик угловой скорости) на ПАВ с использованием эффекта Кориолисовых сил [1, 4] не имеет вращающихся частей, обладает малыми габаритами и весом, но имеет низкую чувствительность.
Наиболее близким к предложенному по технической сущности является датчик ускорения [5] , использующий ПАВ-генератор (генератор на основе эффекта поверхностной акустической волны) как измерительную систему и содержащий чувствительный элемент (звукопровод), выполненный в виде консольно закрепленной балки из пьезоэлектрического материала, инерционную массу, закрепленную на свободном конце чувствительного элемента, измерительную систему в виде двух ПАВ-генераторов на двух противоположных поверхностях чувствительного элемента, и смесителя, выделяющего разностный сигнал. Недостатками данного ПАВ-акселерометра является невозможность измерения угловой скорости.
Целью изобретения является получение возможности измерения угловой скорости малогабаритным высокоточным единым измерительным блоком на ПАВ либо повышение точности и снижение массогабаритных характеристик датчика угловой скорости на ПАВ.
Поставленная цель достигается тем, что единый измерительный блок с преобразователями на поверхностной акустической волне (ПАВ), содержащий корпус и консольно закрепленный в корпусе звукопровод с инерционной массой на свободном конце и преобразователями на ПАВ с обеих сторон, дополнительно снабжен вычислительным блоком и одиннадцатью аналогичными имеющемуся звукопроводами с инерционной массой на свободном конце и преобразователями на ПАВ с обеих сторон, попарно закрепленных в шести гранях кубического корпуса, причем каждая пара звукопроводов имеет общее консольное крепление в корпусе, а плоскости звукопроводов каждой пары разнесены на одинаковый острый угол, а выходы ПАВ-генераторов соединены со входами вычислительного блока, определяющего девять параметров движения - три взаимноортогональные проекции линейного ускорения Wx, Wy, Wz, три взаимноортогональные проекции угловой скорости  и три взаимноортогональные проекции углового ускорения
и три взаимноортогональные проекции углового ускорения  по следующему алгоритму:
по следующему алгоритму:
Wy = ky(f2-f1-f3+f4-f5+f6-f7+f8) = 8kyΔfy;








f1 - f24 - текущее значение частот соответствующих ПАВ-генераторов; соответствующие коэффициенты пропорциональности;
соответствующие коэффициенты пропорциональности;
k = 1/sin(α/2) - соотношение между основной и побочной (от перекрестной связи) проекциями измеряемых параметров на данную измерительную ось;
α - угол между звукопроводами одной пары.
Сущность изобретения заключается в следующем. Под действием измеряемых проекций линейного и углового ускорения и угловой скорости вследствие действия инерционных и центробежных сил инерционные массы отклоняются от статического положения, что вызывает соответствующую деформацию звукопроводов и изменение частот размещенных на них ПАВ-преобразователей, сигналы с которых поступают в вычислительный блок, определяющий количественное значение измеряемых параметров.
Использование консольных чувствительных элементов с преобразователями на ПАВ в измерительной технике известно. Однако их использование для одновременного измерения всех взаимноортогональных проекций линейного и углового ускорений и угловой скорости не известно, о чем свидетельствует проведенный патентный поиск. Таким образом, совокупность известных в отдельности элементов придает устройству новое качество, проявившееся в положительном эффекте - расширении функциональных возможностей, повышении точности и уменьшении массы и габаритов, в связи с чем устройство обладает существенными отличиями.
На чертеже представлена функциональная схема предложенного единого измерительного блока (ЕИБ) с преобразователями на ПАВ. Он содержит корпус 1, двенадцать звукопроводов 2 - 13, каждый из которых имеет инерционную массу на свободном конце и преобразователи на ПАВ 14 - 37 с обеих сторон, и вычислительный блок 38, входы которого подключены к выходам ПАВ-генераторов 14 - 37.
Предложенный единый измерительный блок (ЕИБ) на ПАВ работает следующим образом. При движении объекта, на котором он установлен, с линейным ускорением Wy вдоль оси Oy (на чертеже вверх) инерционные массы звукопроводов 2, 3, 4, 5 вследствие действия силы инерции сдвигаются относительно ЕИБ вдоль оси Oy вниз, что вызывает искривление звукопроводов 2, 3, 4, 5 и в свою очередь изменение частот соответствующих ПАВ-генераторов. Верхние поверхности звукопроводов 2, 3, 4, 5 при этом растянутся, что вызовет уменьшение частоты f2, f4, f5, f7 ПАВ-генераторов 15, 17, 18, 20 [6 - 9] соответственно. Нижние поверхности звукопроводов 2, 3, 4, 5 вследствие указанных деформаций сократятся, что вызовет увеличение частот f1, f3, f6, f8 ПАВ-генераторов 14, 16, 19, 21. Значение линейного ускорения Wy можно определить по формуле:
Wy = ky(f2 - f1 - f3 + f4 - f5 + f6 - f7 + f8) = 8kyΔfy, (1)
где ky - коэффициент пропорциональности, Δfy - изменение частоты на каждом ПАВ-генераторе 14, 15, 16, 17, 18, 19, 20, 21. Аналогично определяются значения проекций линейных ускорений Wx, и Wz, а также проекций углового ускорения ϑ, ψ, ϕ:
Wx = kx(f18 - f17 - f19 + f20 - f21 + f22 - f23 + f24) = = 8kxΔfx;
Wz = kz(f10 - f9 - f11 + f12 - f13 + f14 - f15 + f16) = = 8kzΔfz; = (f17 - f18 + f19 - f20 - f21 + f22 - f23 + f24) =
= (f17 - f18 + f19 - f20 - f21 + f22 - f23 + f24) =  (2)
(2) = (f9 - f10 + f11 - f12 - f13 + f14 - f15 + f16) =
= (f9 - f10 + f11 - f12 - f13 + f14 - f15 + f16) = 
 = (f1 - f2 + f3 - f4 + f5 - f6 - f7 + f8) =
= (f1 - f2 + f3 - f4 + f5 - f6 - f7 + f8) = 
При движении объекта, на котором установлен предложенный ЕИБ на ПАВ, с угловой скоростью ψ вокруг оси Oy вследствие центробежной силы инерционные массы всех звукопроводов отклоняются по нормали от оси Oy, что вызывает растяжение наружных и сжатие внутренних поверхностей пар звукопроводов 2 и 3, 4 и 5, 6 и 7, 8 и 9 и растяжение внутренних и сжатие наружних поверхностей пар звукопроводов 10 и 11, 12 и 13, что в свою очередь вызовет увеличение частот f2, f3, f6, f7, f10, f11, f14, f15, f17, f20, f21, f24 ПАВ-генераторов 15, 16, 19, 20, 23, 24, 27, 28, 30, 33, 34, 37, размещенных на сжимаемых поверхностях звукопроводов, и уменьшение частот f1, f4, f5, f8, f9, f12, f13, f16, f18, f19, f22, f23 ПАВ-генераторов 14, 17, 18, 21, 22, 25, 26, 29, 31, 32, 35, 36. Значение угловой скорости  определить по формуле:
определить по формуле:
 (f1 - f2 - f3 + f4 + f5 - f6 - f7 + f8)
(f1 - f2 - f3 + f4 + f5 - f6 - f7 + f8) 
 (f18 - f17 - f19 + f20 - f21 + f22 - f23 + f24)
(f18 - f17 - f19 + f20 - f21 + f22 - f23 + f24)  (3)
(3) (f10 - f9 - f11 + f12 - f13 + f14 - f15 + f16)
(f10 - f9 - f11 + f12 - f13 + f14 - f15 + f16) 
где k = 1/sin(α/2) - соотношение между основной и побочной (от перекрестной связи) проекциями измеряемых параметров на данную измерительную ост; α - угол между звукопроводами одной пары.
Аналогично определяются проекции угловой скорости ϑ и ϕ:
 (4)
(4)
Сигналы с выходов ПАВ-преобразователей 14 - 37 поступают на входы вычислительного блока 38, который производит преобразование сигналов f1 - f24 в код и вычисление количественного значения измеряемых параметров Wx, Wy, Wz,  по алгоритмам (1) - (4). Данные алгоритмы могут быть выполнены бортовым компьютером, обслуживающим систему управления, в состав которой входит предложенный ЕИБ на ПАВ.
по алгоритмам (1) - (4). Данные алгоритмы могут быть выполнены бортовым компьютером, обслуживающим систему управления, в состав которой входит предложенный ЕИБ на ПАВ.
Перед началом работы ПАВ-преобразователи 14 - 37 настраиваются на одну частоту f0, значение которой записывается в оперативное запоминающее устройство вычислительного блока 38.
Таким образом, использование предложенного ЕИБ на ПАВ позволит повысить функциональные возможности, точность измерения и снизить массу и габариты прибора за счет дополнительного оснащения вычислительным блоком и одиннадцатью аналогичными имеющемуся звукопроводами с инерционной массой на свободном конце и преобразователями на ПАВ с обеих сторон, попарно закрепленных в шести гранях кубического корпуса, причем каждая пара звукопроводов имеет общее консольное крепление в корпусе, а плоскости звукопроводов каждой пары разнесены на одинаковый острый угол, а выходы ПАВ-генераторов соединены со входами вычислительного блока.
Список литературы
1. Tjersten E. N. , Stvens D.S., Das P.K. SAWaccelerometer. Ultrason. Symp. Proc., USA, 1980, p. 692 - 695.
2. Опалев В.Н. Шершун Е.Ф., Кушко Н.И. Пьезоэлектрический датчик угловой скорости. А.с. СССР 265963, кл. H 04 R 17/00, 1970 г.
3. Информация компании Collins Avionics / Electronics Austraia. 1985. vol. 47, N 2, p. 6 - 7.
4. Giroscopic effect in surface acoustic wave. B.Y. Lao / Ultrason. Symp. Proc., USA, 1980, pp 687 - 691.
5. Пат. США N 3.950.713
6. Пат. Франции N 2.452.714
7. А. И.Морозов, В.В.Проклов, Е.А. Станковский. Пьезоэлектрические преобразователи для электронных устройств.- М.: Радио и связь, 1981.
8. Вестник КПИ "Радиотехника", 1983, вып. 20, с. 68.
9. Поверхностные акустические волны, под ред. А.Олинера.- М.: Мир, 1981.
Блок предназначен для измерения линейного и углового ускорение и угловой скорости. В корпусе расположены двенадцать звукопроводов, каждый из которых имеет инерционную массу на свободном конце и преобразователи на поверхностной акустической волне (ПАВ) с обеих сторон. Звукопроводы попарно закреплены в шести гранях кубического корпуса. Каждая пара звукопроводов имеет общее консольное крепление в корпусе. Плоскости звукопроводов каждой пары разнесены на одинаковый острый угол. Выходы ПАВ-генераторов соединены со входами вычислительного блока. Вычислительный блок определяет значения измеряемых параметров по определенному алгоритму. Обеспечивается повышение точности, уменьшение массы и габаритов. 1 ил.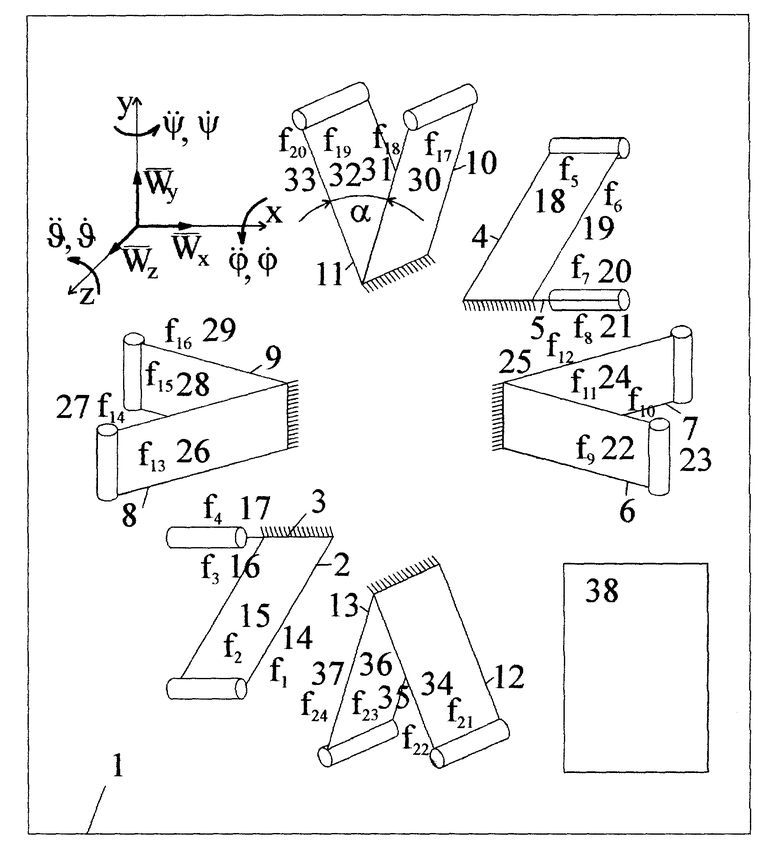
Единый измерительный блок с преобразователями на поверхностной акустической волне (ПАВ), содержащий корпус и консольно закрепленный в корпусе звукопровод с инерционной массой на свободном конце и преобразователями на ПАВ с обеих сторон, отличающийся тем, что он дополнительно снабжен вычислительным блоком и одиннадцатью аналогичными имеющемуся звукопроводами с инерционной массой на свободном конце и преобразователями на ПАВ с обеих сторон, попарно закрепленными в шести гранях кубического корпуса, причем каждая пара звукопроводов имеет общее консольное крепление в корпусе, а плоскости звукопроводов каждой пары разнесены на одинаковый острый угол, выходы ПАВ-генераторов соединены со входами вычислительного блока, определяющего девять параметров движения - три взаимно ортогональные проекции линейного ускорения Wх, Wу, Wz, три взаимно ортогональные проекции угловой скорости  и три взаимно ортогональные проекции углового ускорения
и три взаимно ортогональные проекции углового ускорения  по следующему алгоритму:
по следующему алгоритму:
Wy = ky(f2-f1-f3+f4-f5+f6-f7+f8) = 8kyΔfy;








f1 - f24 - текучее значение частот соответствующих ПАВ-генераторов;  соответствующие коэффициенты пропорциональности; К = 1/sin(α/2) - соотношение между основной и побочной (от перекрестной связи) проекциями измеряемых параметров на данную измерительную ось; α - угол между звукопроводами одной пары.
соответствующие коэффициенты пропорциональности; К = 1/sin(α/2) - соотношение между основной и побочной (от перекрестной связи) проекциями измеряемых параметров на данную измерительную ось; α - угол между звукопроводами одной пары.
| АКСЕЛЕРОМЕТР | 1992 |
|
RU2018132C1 |
| АКСЕЛЕРОМЕТР | 1993 |
|
RU2039996C1 |
| ШИХТА ДЛЯ ПРОИЗВОДСТВА ПОРИСТОГО ЗАПОЛНИТЕЛЯ | 2014 |
|
RU2561383C1 |
| УСТРОЙСТВО ДЛЯ ВЫДЕРГИВАНИЯ КОСТЫЛЕЙ | 1998 |
|
RU2141548C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТВОРОЖНОГО ПРОДУКТА | 2002 |
|
RU2207758C1 |
| DE 19610554 A1, 24.10.96 | |||
| US 4167120 A, 11.09.79. | |||
