Изобретение относится к оптической локации и может использоваться для обнаружения оптических средств наблюдения и прицеливания на фоне сложной подстилающей поверхности, а также для определения точного положения (привязки) обнаруженных средств к характерным объектам на местности: зданиям, сооружениям, оконным проемам, отдельным предметам на местности с использованием телевизионных методов обработки видеосигналов в условиях маскирующего эффекта сигналов подстилающей поверхности.
Известен способ обнаружения средств оптического и оптоэлектронного типа (патент РФ №2133485), выбранный в качестве прототипа. Способ основан на зондировании контролируемого объема пространства сканируемым импульсным лазерным излучением, приеме оптических сигналов изображения в спектральном диапазоне отраженного лазерного излучения с заданной дальности и прилегающего к ней участка пространства, определяемого глубиной наблюдения, преобразования принятых сигналов изображения в видеосигнал, пороговой селекции совокупности принятых видеосигналов для устранения мешающего фонового изображения, при этом зондирование контролируемого объема пространства осуществляют с частотой повторения импульсов лазерного излучения, равной fс/n, где fс - частота строк используемого телевизионного метода преобразования сигналов, n - натуральное число, удовлетворяющее условию n≤fc/fk, a fk - частота кадров используемого телевизионного метода преобразования сигналов, при этом излучаемую последовательность лазерных импульсов кодируют путем амплитудной манипуляции с частотой fk/m, где m - натуральное число, удовлетворяющее условию 2≤m≤fk/2, выявляют из числа принятых видеосигналов, превысивших порог, видеосигналы, коррелированные с кодом амплитудной манипуляции излученной последовательности импульсов, и при их наличии автоматически формируют сигнал тревоги, а после преобразования видеосигналов, коррелированных с кодом амплитудной манипуляции излученной последовательности импульсов в оптическое изображение, фиксируют с помощью оператора утомляющее мерцание яркости телевизионного экрана с частотой амплитудной манипуляции.
Однако данный способ малоэффективен при обнаружении сигналов оптических средств на фоне сложной подстилающей поверхности, например, когда отраженный сигнал наблюдается на фоне темного окна или пещеры, причем дом или склон хорошо подсвечен солнцем под углом. В этом случае полезный сигнал может не превысить порог и сигнал тревоги не сформируется. Другим недостатком известного способа является сложность, а в некоторых случаях невозможность идентификации положения сигнала, обнаруженного оптического средства на наблюдаемой местности. Этот факт связан с низким отношением сигнал/шум в видеосигнале фона, так как сигнал фона подавляется специальными мерами: уменьшением ширины принимаемого спектра естественного фонового излучения за счет выделения только отраженного лазерного излучения, уменьшением времени экспозиции для естественного фонового излучения с целью повышения эффективности временной селекции принимаемого импульсного лазерного сигнала.
Известно также устройство для обнаружения оптоэлектронных объектов, описанное в патенте РФ №2129287, выбранное в качестве прототипа. Устройство содержит частотно-импульсный лазер, электронно-оптический преобразователь (ЭОП) с объективом, фотоприемник, снабженный объективом, вход которого связан с выходом ЭОП, видеоконтрольное устройство, вход которого соединен с выходом фотоприемника, блок обработки видеосигналов, первый вход которого также соединен с выходом фотоприемника, синхронизатор, первый вход которого соединен с выходом фотоприемника, а второй выход - с вторым входом блока обработки видеосигналов, первый и второй импульсные источники высокого напряжения, входы которых соединены с первым выходом синхронизатора, а выход первого импульсного источника соединен с третьим входом ЭОП, блок затворных импульсов, первый вход которого соединен с выходом второго импульсного источника, второй вход - с третьим выходом синхронизатора, а выход - с вторым входом ЭОП, пульт управления, выход которого соединен с вторым входом синхронизатора, делитель кадровой частоты, вход которого соединен с четвертым выходом синхронизатора, а первый выход - с третьим выходом блока обработки видеосигнала, модулятор, первый вход которого соединен с вторым выходом делителя кадровой частоты, второй вход - с пятым выходом синхронизатора, а выход - с входом частотно-импульсного лазера, блок автоматической регулировки усиления, вход которого соединен с выходом фотоприемника, а первый, второй и третий выходы - соответственно с входом объектива, четвертым входом ЭОП и входом объектива фотоприемника.
Одним из недостатков известного устройства является низкая эффективность автоматического обнаружения оптических средств, расположенных в темных помещениях или нишах на фоне светлой подстилающей поверхности или стены здания, например чердачное окно, в котором находится оптоэлектронный прибор, причем стена здания по фронту освещена солнцем. Другим недостатком является зашумленное изображение подстилающей поверхности в широком диапазоне рабочих освещенностей, что связано с узким спектральным диапазоном принимаемых сигналов естественной фоновой освещенности, причем сигнал принимается во временном интервале, пренебрежимо малом в сравнении с длительностью кадра (величина уменьшения сигнала естественной освещенности в сравнении с обычной телевизионной системой равна n=Тk/τстр, где Тk=2·10 -2 секунды - длительность кадра, τстр=10-7÷10-6 - длительность строба - время, в течение которого открыт электронно-оптический преобразователь, порядок n=40000 раз). Последнее приводит к значительным трудностям или невозможности для оператора определить местоположение обнаруженного оптического средства на местности.
Технической задачей изобретения является создание способа обнаружения оптических и оптоэлектронных средств наблюдения и устройства для его осуществления, обеспечивающих более высокую эффективность обнаружения оптических средств наблюдения на подстилающей поверхности, более высокую точность «привязки» обнаруженных средств на местности относительно конкретных предметов, например конкретный оконный проем в здании. Заявляемые способ и устройство объединены единым изобретательским замыслом, позволяющим реализовать поставленную техническую задачу.
Поставленная задача решается тем, что в способе обнаружения оптических и оптоэлектронных средств наблюдения, основанном на зондировании контролируемого объема пространства сканируемым импульсным лазерным излучением с частотой повторения лазерного излучения в диапазоне частот от fk до fc, где fc - частота строк используемого телевизионного метода преобразования сигналов, fk - частота кадров используемого телевизионного метода преобразования сигналов, приеме импульсных лазерных сигналов изображения в спектральном диапазоне отраженного лазерного излучения с заданной дальности и прилегающего к ней участка пространства, определяемого глубиной наблюдения, преобразовании принятых сигналов в видеосигнал, пороговой селекции видеосигналов и формировании сигнала тревоги, в котором согласно изобретению излучаемую последовательность лазерных импульсов модулируют с частотой не выше fk/2 и дополнительно производят кодоимпульсную модуляцию лазерного излучения с частотой не выше fk/4, одновременно производят прием оптических сигналов естественного фонового излучения в спектральном диапазоне отраженного лазерного излучения и производят прием непрерывных оптических сигналов в спектральном диапазоне естественного фонового излучения из наблюдаемого объема пространства, после преобразования принятых оптических сигналов в видеосигнал из первого видеосигнала, соответствующего отраженному лазерному излучению, поэлементно вычитают видеосигнал, соответствующий оптическому сигналу естественного фонового излучения в спектральном диапазоне отраженного лазерного излучения, производят пороговую селекцию разностного видеосигнала и из числа видеосигналов, превышающих порог, выделяют видеосигналы, соответствующие кодоимпульсной модуляции лазерного излучения и при их наличии формируют сигнал тревоги, одновременно из разностного видеосигнала, превысившего порог, и видеосигнала, соответствующего непрерывному оптическому сигналу в спектральном диапазоне естественного фонового излучения с учетом параллакса, соответствующего заданной дальности, формируют композитный видеосигнал, а после преобразования композитного видеосигнала в оптическое изображение с помощью оператора фиксируют положение обнаруженных оптических средств относительно характерных объектов на местности.
Поставленная задача решается также тем, что в устройство обнаружения оптических и оптоэлектронных средств наблюдения, содержащее последовательно размещенные входной объектив, интерференционный фильтр, электронно-оптический преобразователь (ЭОП) и видеокамеру с объективом, блок затворных импульсов, выход которого подключен к управляющему входу электронно-оптического преобразователя, частотно-импульсный лазер, вход которого соединен с модулятором лазера, блок обработки видеосигнала (БОВ), монитор, пульт управления и синхронизатор, первый и второй выходы которого соединены соответственно с входами блока обработки видеосигнала и видеокамеры с объективом, а третий выход через делитель кадровой частоты подсоединен к входу модулятора лазера, выходы пульта управления подключены соответственно к входу синхронизатора и второму входу блока обработки видеосигнала, третий вход которого соединен с входом монитора, согласно изобретению введены блок задержки по дальности и последовательно соединенные вторая видеокамера с объективом, перед которой размещен оптический отрезающий фильтр, и формирователь композитного сигнала, выход которого подключен к входу монитора, выход первой видеокамеры с объективом соединен с вторым входом формирователя композитного видеосигнала через последовательно соединенные коммутатор видеосигнала, блок кадровой памяти, формирователь разностного видеосигнала, пороговый блок и блок коррекции параллакса, выход делителя кадровой частоты подключен к управляющему входу коммутатора видеосигнала, четвертый выход синхронизатора и первый выход БОВ соединены соответственно с первым и вторым входами блока задержки по дальности, выход которого подключен к входу блока затворных импульсов, вторые выходы формирователя разностного видеосигнала и порогового блока соединены соответственно с четвертым и пятым входами БОВ, второй и третий выходы которого подсоединены соответственно к второму входу блока коррекции параллакса и опорному входу порогового блока, а пятый и шестой выходы синхронизатора подключены соответственно к второму входу блока кадровой памяти и управляющему входу формирователя разностного видеосигнала, второй вход которого соединен с вторым выходом коммутатора видеосигнала, причем делитель кадровой частоты выполнен с коэффициентом деления, равным двум.
Устройство дополнительно может содержать формирователь кода, включенный между вторым выходом БОВ и управляющим входом модулятора лазера.
Кроме того, на выходе частотно-импульсного лазера может быть установлен дополнительный интерференционный фильтр.
Видеосигнал от подстилающей поверхности формируется в оптимальных условиях - широкий спектр, стандартная экспозиция и имеет высокое отношение сигнал/шум и, следовательно, изображение местности хорошо опознается оператором. Сигналы от оптических объектов и от подстилающей поверхности дополнительно принимаются в одном угле, спектре и при одинаковой экспозиции, например через кадр (попеременно) в отсутствии и наличии подсвечивающего лазерного излучения, и видеосигналы, соответствующие им, вычитаются один из другого. В этом случае изменениями в наблюдаемом объеме пространства можно пренебречь. Таким образом, устраняется мешающее влияние сигналов от подстилающей поверхности при пороговом обнаружении, например, по критерию Неймана-Пирсона. Выделенные видеосигналы оптических средств и видеосигналы подстилающей поверхности с хорошим отношением сигнал/шум с учетом установленной дальности и базы приема сигналов преобразуются в композитный сигнал, что обеспечивает комфортное наблюдение изображения оператором.
В устройстве это достигается использованием двух каналов приема. В первом канале формируется видеосигнал от подстилающей поверхности - отрезающий фильтр не пропускает спектр излучения лазера. Во втором канале через кадр в одних и тех же условиях принимаются попеременно смесь фонового излучения и сигналов от оптических объектов и только сигналы фонового излучения. Разность этих видеосигналов поступает на пороговое устройство (обнаружитель), порог которого рассчитывается по среднеквадратическому значению шума. Из выделенных видеосигналов и видеосигнала от подстилающей поверхности с учетом установленной дальности и базы (расстояния между оптическими осями приемных каналов) формируется видеосигнал, который и представляется оператору. Кодирование лазерного излучения дополнительно повышает эффективность обнаружения сигналов от оптических объектов.
Способ обнаружения оптических и оптоэлектронных средств наблюдения основан на зондировании контролируемого объема пространства сканируемым импульсным лазерным излучением с частотой повторения лазерного излучения в диапазоне частот от fk до fc, где fk и fc - частоты кадров и строк используемого телевизионного метода преобразования сигналов, приеме импульсных лазерных сигналов изображения в спектральном диапазоне отраженного лазерного излучения с заданной дальности и прилегающего к ней участка пространства, определяемого глубиной наблюдения, преобразовании принятых сигналов в видеосигнал, пороговой селекции видеосигналов и формировании сигнала тревоги, при этом излучаемую последовательность лазерных импульсов модулируют с частотой не выше от fk/2 и производят ее кодоимпульсную с частотой не выше fk/4.
Одновременно с приемом импульсных лазерных сигналов изображения в спектральном диапазоне импульсного лазерного излучения производят прием оптических сигналов естественного фонового излучения в спектральном диапазоне лазерного излучения и производят прием непрерывных оптических сигналов в спектральном диапазоне естественного фонового излучения из наблюдаемого объема пространства, после преобразования принятых оптических сигналов в видеосигнал из первого видеосигнала, соответствующего отраженному лазерному излучению, поэлементно вычитают видеосигнал, соответствующий оптическому сигналу естественного фонового излучения в спектральном диапазоне отраженного лазерного излучения, производят пороговую селекцию разностного видеосигнала и из числа видеосигналов, превышающих порог, выделяют видеосигналы, соответствующие кодоимпульсной модуляции лазерного излучения, и при их наличии формируют сигнал тревоги, одновременно из разностного видеосигнала, превысившего порог, и видеосигнала, соответствующего непрерывному оптическому сигналу в спектральном диапазоне естественного фонового излучения с учетом параллакса, соответствующего заданной дальности, формируют композитный видеосигнал, а после преобразования композитного видеосигнала в оптическое изображение с помощью оператора фиксируют положение обнаруженных оптических средств относительно характерных объектов на местности.
На чертеже приведена структурная электрическая схема устройства обнаружения оптических и оптоэлектронных средств наблюдения.
На чертеже обозначено: обнаруживаемый объект 0, оптический отрезающий фильтр 1, видеокамера 2 с объективом, формирователь 3 композитного видеосигнала, входной объектив 4, интерференционный фильтр 5, электронно-оптический преобразователь 6, видеокамера 7 с объективом, коммутатор видеосигналов 8, блок кадровой памяти 9, формирователь разностного видеосигнала 10, блок коррекции 11 параллакса, пороговый блок 12, блок затворных импульсов 13, блок задержки по дальности 14, делитель кадровой частоты на два 15, синхронизатор 16, формирователь кода 17, блок обработки видеосигнала 18, интерференционный фильтр 19, частотно-импульсный лазер 20, модулятор 21 лазера, монитор 22, пульт управления 23.
Устройство обнаружения оптических и оптоэлектронных средств наблюдения содержит последовательно размещенные входной объектив 4, интерференционный фильтр 5, электронно-оптический преобразователь (ЭОП) 6 и видеокамеру 7 с объективом, блок затворных импульсов 13, выход которого подключен к управляющему входу ЭОП 6, частотно-импульсный лазер 20, вход которого соединен с модулятором лазера 21, блок обработки видеосигнала (БОВ) 18, монитор 22, пульт управления 23 и синхронизатор 16, первый и второй выходы которого соединены соответственно с входами БОВ 18 и видеокамеры 7 с объективом, а третий выход - через делитель кадровой частоты 15 с коэффициентом деления, равным двум, подсоединен к входу модулятора лазера 21, выходы пульта управления 23 подключены соответственно к входу синхронизатора 16 и второму входу БОВ 18, третий вход которого соединен со входом монитора 22, формирователь кода 17, включенный между выходом БОВ 15 и управляющим входом модулятора лазера 21, блок задержки по дальности 14 и последовательно соединенные вторую видеокамеру 2 с объективом, перед которой размещен оптический отрезающий фильтр 1, и формирователь композитного сигнала 3, выход которого подключен к входу монитора 22, выход первой видеокамеры 7 с объективом соединен с вторым входом формирователя композитного видеосигнала 3 через последовательно соединенные коммутатор видеосигнала 8, блок кадровой памяти 9, формирователь разностного видеосигнала 10, пороговый блок 12 и блок коррекции параллакса 11, выход делителя кадровой частоты 15 подключен к управляющему входу коммутатора видеосигнала 8, четвертый выход синхронизатора 16 и другой выход БОВ 18 соединены соответственно с первым и вторым входами блока задержки по дальности 14, выход которого подключен к входу блока затворных импульсов 13, вторые выходы формирователя разностного видеосигнала 10 и порогового блока 12 соединены соответственно с четвертым и пятым входами БОВ 18, второй и третий выходы которого подсоединены соответственно к второму входу блока коррекции параллакса 11 и опорному входу порогового блока 12, а пятый и шестой выходы синхронизатора 18 подключены соответственно к второму входу блока кадровой памяти 9 и управляющему входу формирователя разностного видеосигнала 0, второй вход которого соединен с вторым выходом коммутатора видеосигнала 8.
На выходе частотно-импульсного лазера 20 установлен дополнительный интерференционный фильтр 19.
Устройство работает следующим образом.
Лоцируемый объем пространства, где находится обнаруживаемый объект 0, подсвечивается естественным фоном и импульсным излучением лазера 20 с частотой fс÷fk, где fc и fk - частоты строк и кадров телевизионного способа преобразования оптического сигнала.
Импульсное лазерное излучение в данном конкретном случае модулируется с частотой fк/2 с помощью делителя 16 кадровой частоты на два и модулятора 21 лазера. Дополнительно производится кодирование уже модулированного лазерного излучения с помощью формирователя кода 17 и модулятора 21 лазера. Интерференционный фильтр 19 затрудняет обнаружение объектива лазера сторонними средствами обнаружения.
Отраженное от объекта 0 и подстилающей поверхности лазерное излучение и естественное фоновое излучение, пройдя через входной объектив 4 и интерференционный фильтр 5, формирует на входном фотокатоде ЭОП 6 изображения объекта и лоцируемого объема пространства. Форма лоцируемого объема пространства определяется угловым полем зрения входного объектива 4, а глубина лоцируемого объема пространства определяется длительностью импульса, стробирующего ЭОП 6. Импульс стробирования поступает с блока затворных импульсов 13. Задержка фронта импульса стробирования относительно зондирующего импульса лазера определяет дальность до лоцируемого объема пространства. Время задержки импульса стробирования задается с пульта управления 23 через блок обработки видеосигнала 18 и блок задержки по дальности 14. Коррекция параллакса в зависимости от дальности и величины расстояния между оптическими осями (базы) L между входным объективом 4 и второй видеокамерой с объективом 2 производится в блоке обработки видеосигнала 18, а соответствующий временной сдвиг разностного видеосигнала относительно видеосигнала видеокамеры с объективом 2 устанавливается блоком коррекции параллакса 11.
Оптическое изображение усиливается ЭОП 6 и преобразуется в видеосигнал видеокамерой 7 с объективом. Коммутатор видеосигналов 8 разделяет кадры. Видеосигнал, содержащий сигналы отраженного лазерного излучения, поступает в формирователь разностного видеосигнала 10 через блок кадровой памяти 9, а видеосигнал, соответствующий изображению, полученному в спектре естественного фона с коммутатора видеосигналов 8, поступает на второй вход формирователя разностного видеосигнала 10, на выходе которого формируется разностный видеосигнал, содержащий в структуре видеосигнала лазерные сигналы, отраженные от оптических средств на фоне «практически» белого шума, сигналы от подстилающей поверхности практически полностью подавляются.
Такой результат достигается за счет синфазности и равенства усилений в каналах 7-8-9-10 и 7-8-10. Пороговый блок 12 по превышению порога выделяет сигналы в основном обнаруженных оптических объектов.
Порог в пороговом блоке 12 устанавливается после обработки разностного сигнала в блоке обработки видеосигнала 18. По соответствию кода, которым модулировано зондирующее лазерное излучение, коду, полученному в структуре разностного видеосигнала в блоке обработки видеосигнала 18, принимается решение об обнаружении сигнала оптических средств.
Данная обработка практически исключает влияние на уровень порога видеосигналов подстилающей поверхности и позволяет установить минимальный порог и обнаружить сигналы оптических средств с минимальными уровнями, т.е. реализовать максимальную чувствительность системы к сигналам обнаруживаемых объектов.
Видеосигналы оптических объектов, превысившие порог, через блок коррекции параллакса 11 поступают на формирователь композитного сигнала 3 и далее на монитор 22 и блок обработки 18 видеосигнала.
Таким образом, оператору представляется высококачественное изображение подстилающей поверхности с яркими сигналами обнаруженных оптических и оптоэлектронных объектов, имеющих точную «привязку» к характерным объектам на местности.
Интерференционный фильтр 19 на выходе лазера 20 затрудняет обнаружение данного устройства другими средствами обнаружения аналогичного типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ СРЕДСТВ ОПТИЧЕСКОГО И ОПТОЭЛЕКТРОННОГО ТИПА | 1998 |
|
RU2133485C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2349929C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1998 |
|
RU2129287C1 |
| СПОСОБ И УСТРОЙСТВО ВИЗУАЛИЗАЦИИ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ЗОНЕ НА ЗАДАННОМ УДАЛЕНИИ ОТ ОПЕРАТОРА | 2007 |
|
RU2343503C2 |
| СПОСОБ РЕГИСТРАЦИИ ДИФФУЗНО ОТРАЖЕННОГО ИЛИ ДИФФУЗНО РАССЕЯННОГО ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2458361C1 |
| ЛАЗЕРНАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2544305C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ СИСТЕМ СКРЫТОГО ВИДЕОНАБЛЮДЕНИЯ | 2006 |
|
RU2308746C1 |
| ДВУХКАНАЛЬНОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ НАЗЕМНЫХ ОБЪЕКТОВ | 2005 |
|
RU2350889C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2002 |
|
RU2223515C1 |
| СПОСОБ ЛАЗЕРНОГО ФУНКЦИОНАЛЬНОГО ПОДАВЛЕНИЯ БПЛА | 2022 |
|
RU2796072C1 |
Изобретение относится к оптической локации. Технический результат - высокая эффективность обнаружения оптических средств наблюдения на подстилающей поверхности, более высокая точность «привязки» обнаруженных средств на местности относительно конкретных предметов. Он достигается тем, что одновременно производят прием сигналов естественного фонового излучения в спектральном диапазоне отраженного лазерного излучения и производят прием непрерывных оптических сигналов в спектральном диапазоне естественного фонового излучения из наблюдаемого объема пространства, после преобразования принятых оптических сигналов в видеосигнал из первого видеосигнала, соответствующего отраженному лазерному излучению, поэлементно вычитают видеосигнал, соответствующий оптическому сигналу естественного фонового излучения в спектральном диапазоне отраженного лазерного излучения, производят пороговую селекцию разностного видеосигнала и из числа видеосигналов, превышающих порог, выделяют видеосигналы, соответствующие кодоимпульсной модуляции лазерного излучения, и при их наличии формируют сигнал тревоги, одновременно из разностного видеосигнала, превысившего порог, и видеосигнала, соответствующего непрерывному оптическому сигналу в спектральном диапазоне естественного фонового излучения с учетом параллакса, а после преобразования композитного видеосигнала в оптическое изображение фиксируют положение обнаруженных оптических средств относительно характерных объектов на местности. 2 н. и 2 з.п. ф-лы, 1 ил.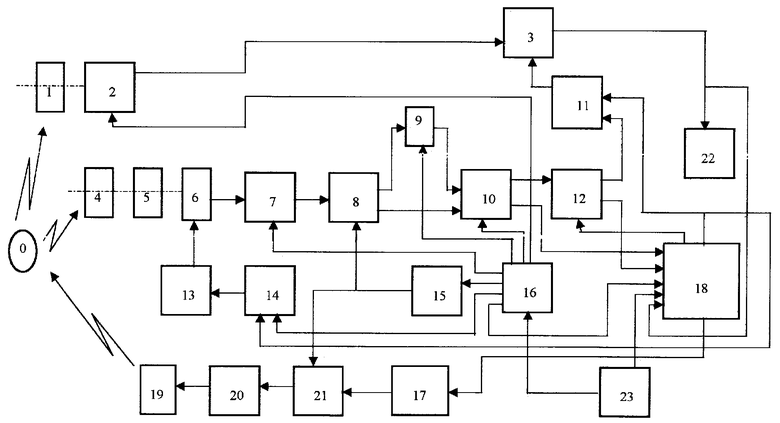
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1998 |
|
RU2129287C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СРЕДСТВ ОПТИЧЕСКОГО И ОПТОЭЛЕКТРОННОГО ТИПА | 1998 |
|
RU2133485C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2224267C2 |
| Устройство для питания электрофильтра | 1987 |
|
SU1421409A1 |
| US 5801970 A, 01.09.1998 | |||
| US 4712003 A, 08.12.1987. | |||

