Изобретение относится к измерительной технике, в частности к приборам для измерения расстояния - дальномерам.
В настоящее время существует целый ряд лазерных дальномеров различного направления и технической реализации. Для измерения расстояния до объектов с обеспечением пространственной селекции используют импульсные лазерные дальномеры, например, описанный в книге В.В.Молебного «Оптико-локационные системы». - М., Машиностроение, 1981, с.52. Он содержит импульсный лазер с оптической коллимирующей системой, излучающий короткие оптические импульсы на объект, с выхода ответвляют стартовый опорный импульс на опорный фотоприемник с импульсным усилителем, который соединен со стартовым импульсом измерителя временных интервалов (ИВИ). Отраженный от объекта оптический сигнал через оптический приемный объектив попадает на фотоприемник, усиливается импульсным усилителем и подается на столовый вход ИВИ. Измеренный временной интервал в аналоговом или цифровом виде отображает измеренное расстояние до объекта.
Недостатком данного лазерного дальномера является невозможность селектировать объект по дальности и по полю зрения, например, если в поле зрения находится несколько целей или точечный или протяженный объект, то селекцию объекта по угловым и отражающим характеристикам произвести невозможно.
Частично решает данную задачу импульсный дальномер (та же литература, с.55, рис.2.6), который является прототипом изобретения.
Этот дальномер содержит последовательно связанные между собой импульсный лазер (ПКГ) с оптической системой, усилитель импульсов накачки ПКГ и управляемый генератор импульсов накачки ПКГ, а также последовательно соединенные между собой фотоприемник на базе лавинного фотодиода (ЛФД) с оптической системой, сопряженной с полем оптической системы ПКГ, усилитель фотодетектированных сигналов, компаратор и измеритель временных интервалов, а также индикатор обнаружения объекта. В данном дальномере информация о дальности каждого объекта хранится в блоке памяти, из которого выводится информация о требуемом объекте считывающим устройством.
Авторы решали задачу по созданию малогабаритного лазерного дальномера-обнаружителя скрытного наблюдения за оптическими наблюдательными объектами (подзорными трубами, перископами, биноклями, фотоаппаратурой и т.п.). При этом необходимо обеспечивать селекцию данного класса объектов на фоне паразитных объектов (стены и конструкции домов, сооружений, леса, травы и т.п.) как по характеристикам отражения (квазикатафотные объекты на фоне диффузных объектов), так V и угловым характеристикам (точечные объекты на фоне протяженных).
Для решения поставленной задачи предлагается лазерный дальномер, содержащий последовательно связанные между собой импульсный лазер (ПКГ) с оптической системой, усилитель импульсов накачки ПКГ и управляемый генератор импульсов накачки ПКГ, а также последовательно соединенные между собой фотоприемник на базе лавинного фотодиода (ЛФД) с оптической системой, сопряженной с полем оптической системы ПКГ, усилитель фотодетектированных сигналов, компаратор и измеритель временных интервалов (ИВИ), а также индикатор обнаружения объекта. Отличительной особенностью предлагаемого дальномера является то, что усилитель импульсов накачки ПКГ снабжен дополнительным выходом, к которому подключен второй ПКГ с оптической системой, сопряженной с оптическими системами первого ПКГ и ЛФД, и дополнительным вторым входом, соединенным с первым входом усилителя импульсов накачки ПКГ, первым выходом управляемого генератора импульсов накачки ПКГ и первым входом измерителя временных интервалов (ИВИ), а также введены синхронизатор, первый выход которого соединен с третьим входом усилителя импульсов накачки ПКГ, третий выход - с третьим входом первого компаратора, а вход - со вторым выходом управляемого генератора импульсов накачки ПКГ, второй компаратор, подключенный первым входом к выходу усилителя фотодетектированных сигналов и одновременно к первому входу первого компаратора, а вторым входом - ко второму выходу синхронизатора, первый и второй интеграторы, подключенные входами к выходу второго компаратора, третий интегратор, подключенный входом ко второму выходу синхронизатора, сумматор, первый вход которого соединен с выходом первого интегратора, второй вход - с выходом второго интегратора, третий вход - с выходом третьего интегратора, а выход - со вторым входом первого компаратора, управляемый регулятор питания ЛФД, соединенный первым выходом со вторым входом сумматора, а вторым выходом - с ЛФД, управляемый счетчик, установленный на связи первого компаратора с индикатором обнаружения объекта так, что его первый вход подключен к выходу первого компаратора и ко второму входу измерителя временных интервалов, второй вход - к четвертому выходу синхронизатора, а первый выход - со входом индикатора обнаружения объекта и входом дополнительно введенного формирователя импульсов запрета, генератор строба, подключенный входом ко второму выходу управляемого счетчика, а выходом - к входу управляемого генератора импульсов накачки ПКГ, а выход формирователя импульсов запрета соединен с третьим входом измерителя временных интервалов, причем выход измерителя временных интервалов связан с четвертым входом усилителя импульсов накачки ПКГ.
Дополнительно предлагается лазерный дальномер оснастить речевым синтезатором, установленным на связи, соединяющей измеритель временных интервалов и усилитель импульсов накачки ПКГ так, что его первый вход подключен к выходу измерителя временных интервалов, второй вход - к выходу формирователя импульсов запрета, а выход - к четвертому входу усилителя импульсов накачки ПКГ.
Техническим результатом заявленного технического решения является повышение селективности измеряемых объектов. Введение трех ветвей управления позволяет осуществить адаптацию порога обнаружения, во-первых, от медленно изменяющихся факторов - температуры и медленных изменений фона (день, ночь, пасмурно и т.п.), во-вторых, от быстроизменяющихся условий (перепад фона - светлое - темное, здание, тень, паразитные источники света в поле зрения при быстром сканировании дальномером по пространству) и, в-третьих, от дальности до объекта, с целью снижения амплитудно-временной погрешности изменения расстояния и пространственно-временной амплитудой селекции полезных объектов (оптические системы) над паразитными (диффузно-отражающими).
Применение речевого синтезатора позволяет получать информацию по дальности без отвлечения оператора от функций поиска и наблюдения объектов, что повышает надежность и оперативность поиска и снятия информации. Применение индикатора обнаружения объекта позволяет быстро фиксировать положение поля зрения дальномера на объекте.
Двойной режим накачки ПКГ позволяет повысить скрытность и снизить порог обнаружения дальномера приборами ночного видения. Применение двух излучающих каналов с разнесенными диаграммами излучения позволяет производить селекцию полезных точечных объектов (оптических систем) относительно протяженных объектов (диффузно-отражающих стен и т.п., стекол зданий, дорожных знаков и т.п.) по критерию угловых и линейных размеров.
На фиг.1 приведена схема предлагаемого лазерного дальномера, на фиг.2 - эпюры сигналов и принцип работы дальномера, на фиг.3 - диаграмма излучения разнесенных каналов, где 1 - усилитель импульсов накачки, 2 - управляемый генератор импульсов, 3 - третий интегратор, 4 - синхронизатор, 5 - управляемый регулятор питания ЛФД, 6, 7 - оптические коллимирующие объективы, 8 - оптический приемный объектив, 9 - усилитель фотодетектированных сигналов, 10 - второй компаратор, 11 - первый компаратор, 12 - первый интегратор, 13 - второй интегратор, 14 - управляемый счетчик, 15 - измеритель временных интервалов (ИВИ), 16 - сумматор, 17 - речевой синтезатор, 18 - индикатор обнаружения объектов, 19 - формирователь импульсов запрета, 20 - первый импульсный лазер, 21 - второй импульсный лазер, 22 - лавинный фотодиод (ЛФД).
При этом двухканальный коммутируемый усилитель импульсов накачки ПКГ 1 имеет четыре входа, два из которых (стробируемый и опорный) связаны соответственно с одним из четырех выходов синхронизатора 4 и выходом речевого синтезатора 17, а два других соединены между собой и вместе с одним из трех выходов ИВИ 15 связаны с одним из двух выходов управляемого генератора импульсов накачки ПКГ 2. К двум выходам усилителя импульсов накачки ПКГ 1 подсоединены ПКГ 1 20 и ПКГ 2 21. Второй выход управляемого генератора импульсов накачки 2 связан с входом синтезатора 4. Вход управляемого генератора импульсов накачки 2 соединен с выходом генератора строба 23, вход которого, в свою очередь, соединен с одним из двух выходов управляемого счетчика 14. Второй выход синхронизатора 4 соединен с одним из трех входов второго компаратора 10, являющимся стробирующим, и одновременно - с входом третьего интегратора 3. Третий выход синтезатора 4 соединен с одним из трех входов первого компаратора 11, являющимся стробирующим. Четвертый выход синхронизатора 4 соединен с одним из двух входов управляемого счетчика 14, являющимся стробирующим. Второй вход второго компаратора 10 соединен одновременно со вторым входом первого компаратора 11 и с выходом усилителя фотодетектированных сигналов 9. Третий вход второго компаратора 10 (опорный) предназначен для приема сигнала, соответствующего устанавливаемому порогу обнаружения. Третий вход первого компаратора 11 (опорный) соединен с выходом сумматора 16. Выход второго компаратора 10 соединен одновременно с входом интеграторов 12 и 13. Выход первого интегратора 12 соединен с одним из трех входов сумматора 16. Третий вход сумматора 16 соединен с выходом интегратора 3, а второй - одновременно с выходом второго интегратора 13 и одним из двух выходов управляемого регулятора питания ЛФД 5. Второй выход регулятора 5 соединен с ЛФД, который, в свою очередь, соединен с входом усилителя фотодетектированных сигналов 9. Выход первого компаратора 11 соединен одновременно со вторым входом управляемого счетчика 14 и вторым входом измерителя временных интервалов 15. Второй выход управляемого счетчика 14 соединен одновременно с входами формирователя импульсов запрета 19 и индикатора обнаружения объекта 18. Выход формирователя импульсов запрета 19 соединен одновременно с третьим входом ИВИ 15 и одним из двух входов речевого синтезатора 17. Второй вход речевого синтезатора 17 соединен с выходом ИВИ 15.
Лазерный дальномер работает следующим образом.
Управляемый генератор импульсов 2 формирует последовательность коротких импульсов Тим ˜ 100 нсек с частотой следования Fсл ˜ 100 Гц ÷ 1 кГц (достаточный для обзора пространства), попеременно через усилитель накачки ПКГ 1 импульсы запускают лазеры 20 и 21. Через коллимирующие объективы 6 и 7 излучение ПКГ попадает на объект. Отраженный от объекта сигнал попадает на приемный объектив 8, затем на фотоприемник - ЛФД 22. Фотодетектированный сигнал усиливается усилителем импульсов 9 и попадает на компараторы 10 и 11. Первый компаратор 11 выделяет информационный сигнал при превышении порога обнаружения, который формируется тремя ветвями. Второй компаратор 10 формирует управляющие сигналы, пропорциональные уровню шумов приемного канала:
Vшум=Pфон+Vпит.ЛФД+Vшум.усил±VшумТ°C,
где
Рфон - уровень фонового шума;
Vпит.ЛДФ - уровень шума регулятора питания ЛФД;
Vшум.усил - уровень шума усилителя импульсов;
VшумТ°C - температурный шум.
Число шумовых импульсов после второго компаратора 10 преобразуется в интеграторах 12, 13 в управляющие сигналы с различной постоянной времени. Медленно изменяющийся сигнал Vупр2 (с τ2) подается на управляемый регулятор питания ЛФД 5, который регулирует коэффициент усиления ЛФД, за счет чего обеспечивается постоянство уровня шума (порога обнаружения) в широких условиях эксплуатации (Рф 0÷10-5 Вт, Т°С=-40÷50°С).
Первый сигнал Vупp1 (с τ1<<τ2) является быстродействующим и подается через сумматор 16 одновременно с Vупp2 на опорный вход первого компаратора 11. Одновременно на сумматор 16 подается третий сигнал Уупр3 с третьего интегратора 3 с τ3 Тб.3. (Тб.3.=1÷2 мкс - зона ближнего обнаружения ˜50+300 м).
Vynp3 является адаптивным сигналом, учитывающим коррекцию порога обнаружения в зависимости от изменения сигнала по дистанции. Это требуется для подавления сигналов от диффузных объектов и выделения сигналов от оптических систем.
Введение трех ветвей управления решает следующие задачи:
Vупр2 - решает задачу адаптации порога обнаружения от медленно изменяющихся факторов - температуры и медленных изменений фона (день, ночь, пасмурно и т.п.);
Vупр1 - решает задачу адаптации порога обнаружения от быстроизменяющихся условий (перепад фона - светлое - темное, здание, тень, паразитные источники света в поле зрения при быстром сканировании дальномером по пространству);
Vупр3 - решает задачу адаптации порога обнаружения в зависимости от дальности до объекта с целью снижения амплитудно-временной погрешности изменения расстояния и пространственно-временной амплитудой селекции полезных объектов (оптические системы) над паразитными (диффузно-отражающими).
Оптические системы дают отраженный сигнал (блик) по уровню сигнала
Ротр.опт=Рдиф(θдиф/θопт)=Pдиф·(102÷103)
значительно больший, чем диффузные объекты, где
θдиф≅120°÷180°˜(2-3)рад≅0
θдопт≅1°÷5°˜(0,017-0,1) рад.
Для практического применения допустимо использование закона регулирования
Vупр(t)=V0 ехр(l/τ3).
Благодаря этим техническим решениям повышается помехозащищенность и избирательность обнаружения и измерения параметров объектов.
Например, оптические приборы имеют отражающую апертуру ˜20÷50 мм, а стены, стекла, светоотражающие знаки значительно большие размеры. Поэтому от протяженных объектов мы имеем два сигнала как от первого ПКГ, так и от второго ПКГ. При этом вырабатывается по сигналу управляемого счетчика 14 в формирователе импульсов запрета 19 сигнал запрета выдачи информации. При наличии одного сигнала от первого ПКГ запрет отсутствует.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лазерный обнаружитель оптических сигналов | 2023 |
|
RU2816284C1 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2551700C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1998 |
|
RU2129287C1 |
| Синтезатор частот | 1986 |
|
SU1478328A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА НА МАЛЫХ ДИСТАНЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2549210C2 |
| Лазерный импульсный дальномер | 2022 |
|
RU2791186C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА МОДУЛИРОВАННЫХ ПО ФАЗЕ И ЧАСТОТЕ ШИРОКОПОЛОСНЫХ СИГНАЛОВ ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ, ОБОРУДОВАННЫХ БЛОКИРАТОРАМИ РАДИОЛИНИЙ УПРАВЛЕНИЯ ВЗРЫВОМ | 2007 |
|
RU2336634C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |


Изобретение относится к измерительной технике, в частности к приборам для измерения расстояния - дальномерам. Лазерный дальномер содержит два импульсных лазера (ПКГ) с оптической системой, усилитель импульсов накачки ПКГ, управляемый генератор импульсов накачки ПКГ, фотоприемник с оптической системой, сопряженной с полем оптической системы ПКГ, усилитель фотодетектированных сигналов, два компаратора, измеритель временных интервалов (ИВИ), индикатор обнаружения объекта, синхронизатор, интеграторы, сумматор, регулятор питания фотоприемника, формирователь импульсов запрета, управляемый счетчик, генератор строба. Технический результат - повышение селективности измеряемых объектов. 1 з.п. ф-лы, 3 ил.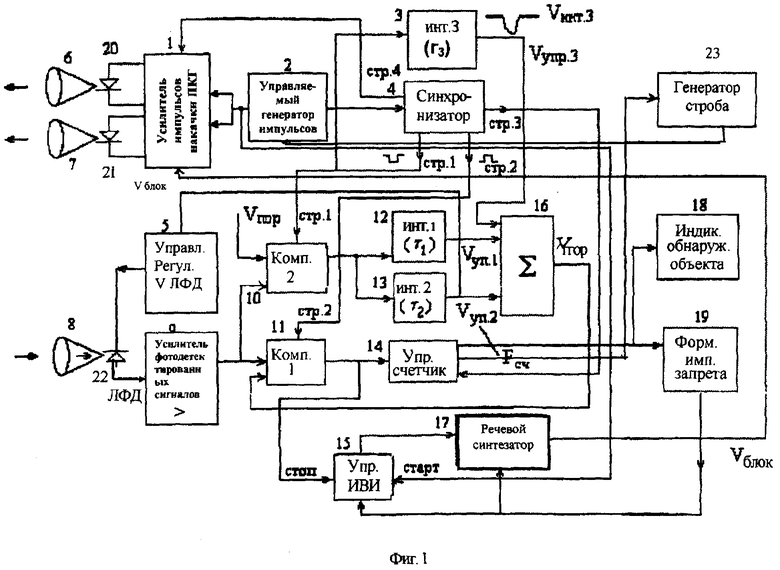
| RU 2001135382 A, 10.09.2003 | |||
| RU 96115820 A, 20.10.1998 | |||
| US 5220164, 15.06.1993 | |||
| US 5694203, 02.12.1997 | |||
| WO 9905473, 04.02.1999. |

