Настоящее изобретение относится к управлению силовыми передачами моторных транспортных средств и более конкретно такими, которые имеют бесступенчатую трансмиссию, способную обеспечить бесконечное уменьшение скорости от входа к выходу («нейтраль зубчатой передачи»).
Бесступенчатые трансмиссии обычно содержат вариатор, то есть устройство, обеспечивающее бесступенчато-регулируемое передаточное число, расположенный между входом и выходом трансмиссии и связанный с ними через вспомогательную зубчатую передачу. Некоторые такие трансмиссии способны достичь состояния, обозначаемого как «нейтраль зубчатой передачи», в котором они обеспечивают бесконечное уменьшение скорости от входа к выходу, так что даже если вход трансмиссии вращается и он связан с выходом через трансмиссию, выход трансмиссии неподвижен. Один известный тип трансмиссии с «нейтралью зубчатой передачи» использует шунтирующий планетарный механизм, имеющий три поворотных вала, связанных соответственно с солнечной шестерней, зубчатым колесом и водилом планетарного механизма. Один вал также связан с входом трансмиссии через вариатор и таким образом может приводиться в движение от него с бесступенчатым передаточным числом. Другой вал связан с входом трансмиссии через зубчатую передачу с постоянным передаточным числом. Третий вал связан через другую зубчатую передачу с выходом трансмиссии и его скорость вращения является функцией скоростей других двух валов, что будет понятно специалистам по планетарным механизмам. При определенном передаточном числе вариатора движения первого и второго валов компенсируют друг друга, оставляя третий вал, и выход трансмиссии, неподвижным.
Обычно передаточное число трансмиссии определяется как скорость на входе трансмиссии, деленная на скорость на ее выходе. Определенное таким образом передаточное число ведет себя асимптотически, имея тенденцию к бесконечности в «нейтрали зубчатой передачи». Вследствие этого будет удобно в дальнейшем вместо такого передаточного числа обратиться к «обратному передаточному числу трансмиссии», т.е. определяемому как скорость на выходе трансмиссии, деленная на скорость на ее входе, - чье поведение вокруг «нейтрали зубчатой передачи» является не асимптотическим (оно просто падает до нуля) и также является более легким для описания.
Конечно большая часть трансмиссий грузовых транспортных средств использует «пусковое устройство» некоторого вида, такое как управляемое водителем сцепление обычной ручной трансмиссии, или преобразователь крутящего момента (трансформатор) обычной ступенчатой автоматической трансмиссии, чтобы расцепить двигатель и колеса транспортного средства, когда транспортное средство неподвижно, и чтобы обеспечить проскальзывание между двигателем и колесами, когда транспортное средство трогается с места. В трансмиссии с «нейтралью зубчатой передачи» становится возможным (хотя и не обязательно) обойтись без пускового устройства. Трансмиссия способна перейти от задней передачи через «нейтраль зубчатой передачи» к передней передаче просто благодаря изменениям в передаточном числе вариатора, без необходимости расцепления двигателя и колес. При очень малых обратных передаточных числах трансмиссии, которые обеспечены посредством трансмиссии с «нейтралью зубчатой передачи», возрастают проблемы в управлении силовой передачей, с которыми просто никогда не сталкиваются с более традиционными трансмиссиями.
В идеальной системе без потерь на трение, согласование и т.д. нулевое обратное передаточное число трансмиссии подразумевало бы бесконечное увеличение крутящего момента от входа трансмиссии к ее выходу. Таким образом, любой крутящий момент на входе давал бы бесконечный крутящий момент на выходе. Конечно никакая реальная трансмиссия не может получить бесконечный крутящий момент на выходе. Более реалистичный способ охарактеризовать ситуацию - это сказать, что при этом условии, в стабильном состоянии (т.е. когда двигатель/вход трансмиссии не ускоряются) крутящий момент на входе трансмиссии равен нулю при любом вращающем моменте на ее выходе. Условие, при котором крутящий момент на выходе трансмиссии создает нулевой крутящий момент на ее входе, будет обозначено здесь как «сингулярность». Это имеет значение для способа, посредством которого нужно управлять двигателем и трансмиссией вокруг «нейтрали зубчатой передачи».
Некоторые вытекающие проблемы и один способ их решения были рассмотрены в ранее выданном патенте США №5521819 и его аналоге, европейском патенте №643648, на имя Torotrak (Development) Limited. Настоящее изобретение, однако, является результатом установления факта, не найденного в данном более раннем патенте, что в реальной трансмиссии, из-за потерь на трение, имеется не одна, а две сингулярности, ни одна из которых не имеет место точно в «нейтрали зубчатой передачи». Вместо этого данные две сингулярности имеют место при соответствующих обратных передаточных числах трансмиссии, находящихся вблизи «нейтрали зубчатой передачи», но располагающихся по обеим ее сторонам, т.е. на низких обратных передаточных числах трансмиссии переднего хода и заднего хода. Сингулярности встречаются только в условиях «движения накатом», т.е. когда крутящий момент, выдаваемый трансмиссией на ее выходе, ведет к замедлению выхода трансмиссии. В этом случае энергия вводится в трансмиссию через выход, и когда данная энергия равна энергии, рассеянной вследствие потерь в трансмиссии, тогда имеет место сингулярность.
Это имеет большое значение для способа управления двигателем и трансмиссией. Было обнаружено, что существующие системы управления, которые работают безупречно в большинстве условий, в значительной мере работают неправильно в определенных ситуациях, например при «движении назад-вперед» и подъеме/спуске с холма.
С другой стороны преимущества, которые должны быть получены, согласно настоящему изобретению от правильного управления силовой передачей на передаточных числах вокруг сингулярностей, были поразительными. В частности становится возможным использовать трансмиссию для осуществления такого точного управления на малых скоростях транспортного средства, чтобы сделать возможным для водителя полный диапазон вариантов управления.
Одна конкретная проблема относится к управлению скоростью двигателя при «движении накатом». Полезно в данном случае провести различие между (1) ситуацией, когда двигатель «нагружен» трансмиссией, т.е. крутящий момент на входе трансмиссии ведет к замедлению двигателя, и (2) противоположным условием, когда двигатель «ненагружен», крутящий момент на входе трансмиссии ведет к разгону двигателя. Ненагруженное состояние двигателя имеет место при «движении накатом» на передаточных числах, удаленных от «нейтрали зубчатой передачи». Энергия идет от колес к двигателю и рассеивается в нем путем трения, обеспечивая «торможение двигателем». В этом случае, при силовой передаче с электронным управлением, является обычным прекращение подачи топлива на двигатель, применяя запрос к нему нулевого крутящего момента. Однако «движение накатом» не всегда приводит двигатель к ненагруженному состоянию. При обратных передаточных числах трансмиссии между сингулярностями двигатель всегда нагружен, при любом крутящем моменте «движения накатом» на выходе трансмиссии/колесах транспортного средства. Если не учитывать этого, это ведет к потере управления скоростью двигателя в исключительных условиях, когда имеют место сингулярности.
Согласно первому варианту настоящего изобретения предлагается способ управления силовой передачей моторного транспортного средства, содержащей бесступенчатую трансмиссию и двигатель, причем трансмиссия содержит поворотный вход трансмиссии, связанный с двигателем, поворотный выход трансмиссии, связанный с колесами транспортного средства, вариатор, который обеспечивает бесступенчато-регулируемое передаточное число («передаточное число вариатора»), и зубчатую передачу для подсоединения вариатора между двигателем и выходом трансмиссии таким образом, что передаточное число, определяемое как отношение скорости выхода трансмиссии к скорости входа трансмиссии («обратное передаточное число трансмиссии»), является функцией передаточного числа вариатора, что доступный диапазон передаточных чисел вариатора отображается на обоих, обратных передаточных числах трансмиссии переднего хода и заднего хода и что при определенном передаточном числе вариатора («передаточное число нейтрали зубчатой передачи») выход трансмиссии является неподвижным, несмотря на то, что он связан через трансмиссию с вращающимся входом трансмиссии, способ отличается тем, что он включает в себя поддержание скорости двигателя в диапазоне низких обратных передаточных чисел трансмиссии, содержащем «нейтраль зубчатой передачи» и проходящем от нее в обе стороны, путем подачи запроса приводного крутящего момента на двигатель, даже тогда, когда силовая передача работает в состоянии «движения накатом».
В частности, указанный приводной крутящий момент является более чем эффективным для преодоления внутренних потерь в двигателе. В результате поток энергии идет от двигателя к трансмиссии несмотря на то, что силовая передача работает в состоянии «движения накатом».
Наиболее предпочтительно, чтобы вышеуказанный диапазон передаточных чисел простирался, по меньшей мере, от одного передаточного числа сингулярности до другого.
Было установлено, что между сингулярностями нагрузка, приложенная трансмиссией к двигателю, увеличивается при увеличении крутящего момента «движения накатом» на выходе трансмиссии.
В наиболее предпочтительном варианте осуществления способ включает в себя увеличение запроса крутящего момента двигателя в ответ на увеличение крутящего момента «движения накатом» на выходе трансмиссии.
Способ применим в частности к трансмиссиям, использующим вариатор «с регулируемым крутящим моментом». Такие вариаторы известны и один пример будет описан ниже. Обычный вариатор получает сигнал управления, указывающий требуемое передаточное число, и сконструирован и управляется таким образом, чтобы отрегулировать себя на это передаточное число. В отличие от этого вариатор с регулируемым крутящим моментом получает сигнал, указывающий требуемый реактивный крутящий момент, определяемый как сумма крутящих моментов на входе и выходе вариатора. Реактивный крутящий момент таким образом - это эффективный крутящий момент, ведущий к вращению всего вариатора в целом, который должен действовать на крепление вариатора. Передаточное число регулируется косвенно. Вместо этого вариатор создает требуемый реактивный крутящий момент и автоматически обеспечивает изменения передаточного числа, обусловленные ускорением двигателя и/или транспортного средства.
Имеется неизбежная задержка между изменением запроса крутящего момента двигателя и соответствующим изменением в выдаваемом крутящем моменте двигателя, особенно когда изменение вызывается переменой в подаче топлива к двигателю. При «движении накатом», когда обратное передаточное число трансмиссии, во время подъема или падения по направлению к нулю («нейтраль зубчатой передачи»), проходит через сингулярность, состояние двигателя изменяется из ненагруженного в нагруженное. Если крутящий момент двигателя недоступен немедленно, несмотря на задержку, скорость двигателя будет падать, с риском остановки двигателя.
Наиболее предпочтительный вариант осуществления настоящего изобретения включает, во время работы при «движении накатом» и когда обратное передаточное число трансмиссии повышается или падает по направлению к нулю, увеличение запроса крутящего момента двигателя до того, как обратное передаточное число трансмиссии пройдет через любую из двух сингулярностей.
Увеличение запроса крутящего момента предпочтительно имеет эффект получения приводного крутящего момента двигателя, когда передаточное число трансмиссии находится в сингулярности, или перед этим.
Рассматриваемый двигатель обычно является двигателем внутреннего сгорания и, более конкретно, двигателем без регулирования скорости, как, например обычный бензиновый двигатель. Двигатели, которые регулируют собственную скорость, такие как некоторые дизельные двигатели, не являются предметом всех подобных проблем. Однако изобретение могло бы предположительно использоваться с силовыми передачами, имеющими двигатели других типов, и термин «двигатель» необходимо понимать, как охватывающий вращающиеся силовые установки других типов, включая электрические двигатели.
Согласно второму варианту настоящего изобретения предлагается система управления для силовой передачи моторного транспортного средства, содержащей бесступенчатую трансмиссию и двигатель, причем трансмиссия содержит поворотный вход трансмиссии, связанный с двигателем, поворотный выход трансмиссии, связанный с колесами транспортного средства, вариатор, который обеспечивает бесступенчато-регулируемое передаточное число («передаточное число вариатора»), и зубчатую передачу для подсоединения вариатора между входом и выходом трансмиссии таким образом, что передаточное число, определяемое как отношение скорости выхода трансмиссии к скорости входа трансмиссии («обратное передаточное число трансмиссии»), является функцией передаточного числа вариатора, что доступный диапазон передаточных чисел вариатора отображается на обоих, обратных передаточных числах трансмиссии переднего хода и заднего хода и что при определенном передаточном числе вариатора («передаточное число нейтрали зубчатой передачи») выход трансмиссии является неподвижным, несмотря на то, что он связан через трансмиссию с вращающимся входом трансмиссии, вариатор такого типа, который сконструирован так, чтобы обеспечить требуемый реактивный крутящий момент и автоматически обеспечить изменения в передаточном числе трансмиссии/вариатора, и система управления имеет два алгоритма для определения реактивного крутящего момента, требуемого от вариатора, - алгоритм по умолчанию и алгоритм для условия сингулярности, и организована таким образом, чтобы передавать управление от алгоритма по умолчанию к алгоритму для условия сингулярности, когда передаточное число трансмиссии достигает любой из двух сингулярностей в состоянии «движения накатом».
Далее будут описаны конкретные варианты осуществления настоящего изобретения исключительно путем примера, со ссылкой на прилагаемые чертежи, на которых:
Фиг.1а представляет собой график зависимости крутящего момента на входе трансмиссии (нагружающий крутящий момент двигателя) от передаточного числа вариатора, для различных значений реактивного крутящего момента;
Фиг.1b представляет собой график зависимости крутящего момента на выходе трансмиссии (крутящий момент колеса) от передаточного числа вариатора для тех же значений реактивного крутящего момента;
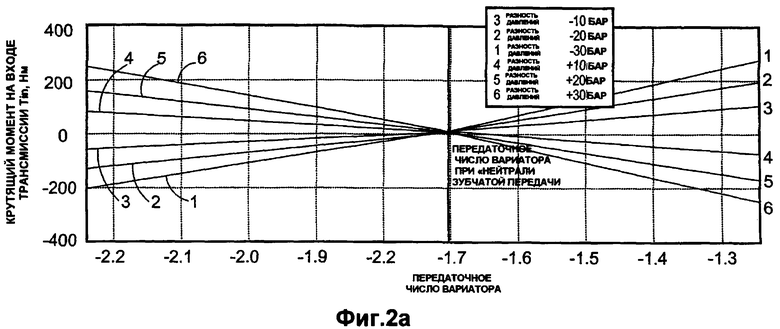
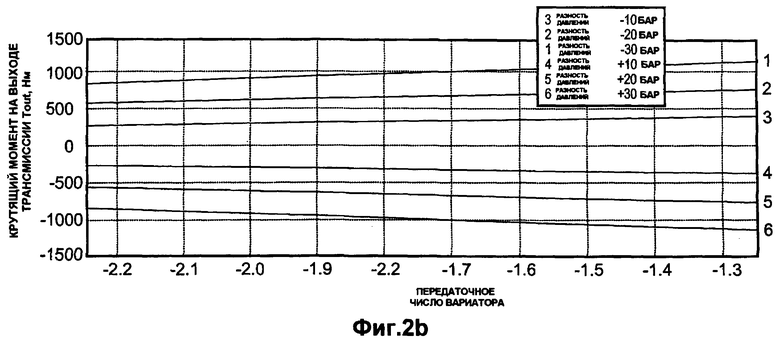
Фиг.2а и 2b представляют собой графики, подобные графикам на Фиг.1а и 1b, за исключением того, что на них показаны крутящие моменты, выдаваемые условной трансмиссией с бесконечно высоким КПД;
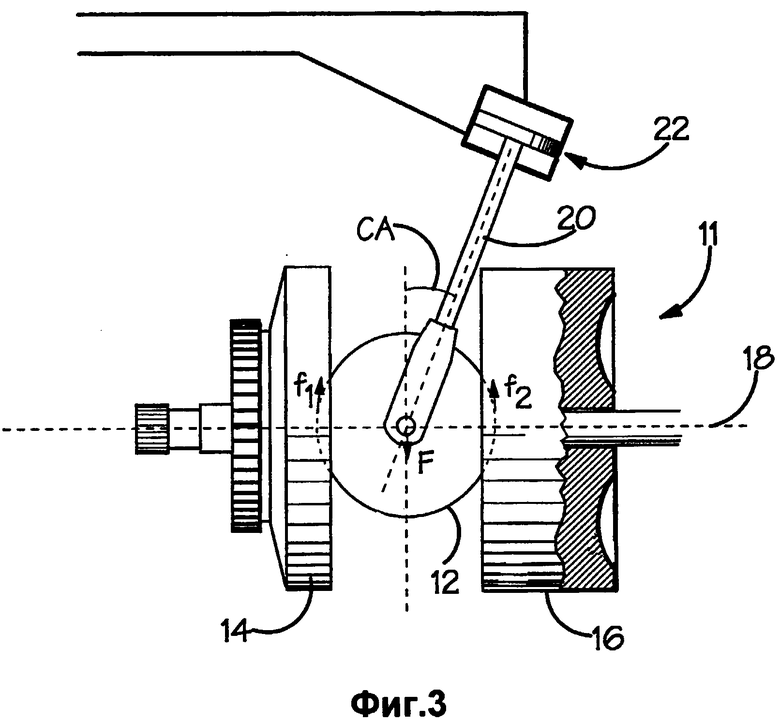
Фиг.3 представляет собой очень упрощенное изображение вариатора для использования в настоящем изобретении;
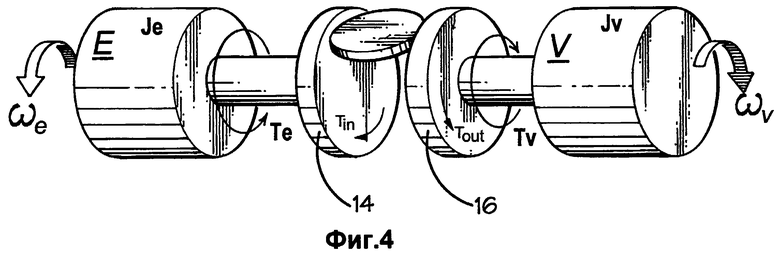
Фиг.4 представляет собой очень упрощенное схематическое изображение силовой передачи, работающей в соответствии с настоящим изобретением;
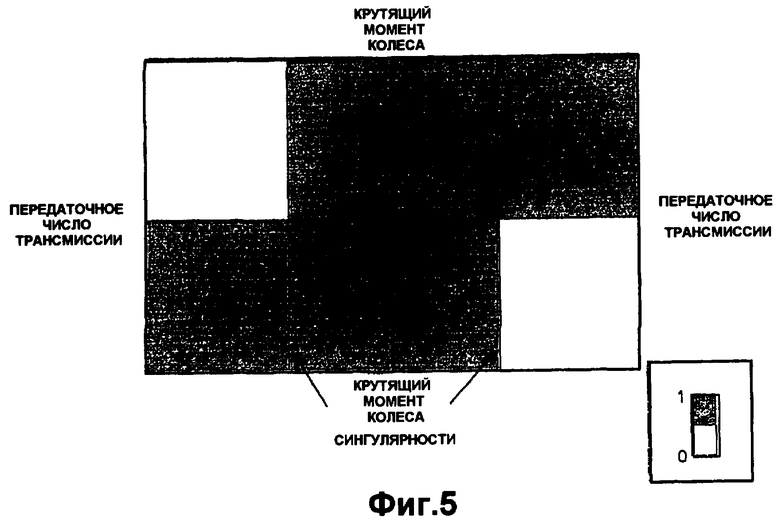
Фиг.5 представляет собой график зависимости передаточного числа от крутящего момента колеса, показывающий в каких областях двигатель нагружен трансмиссией;
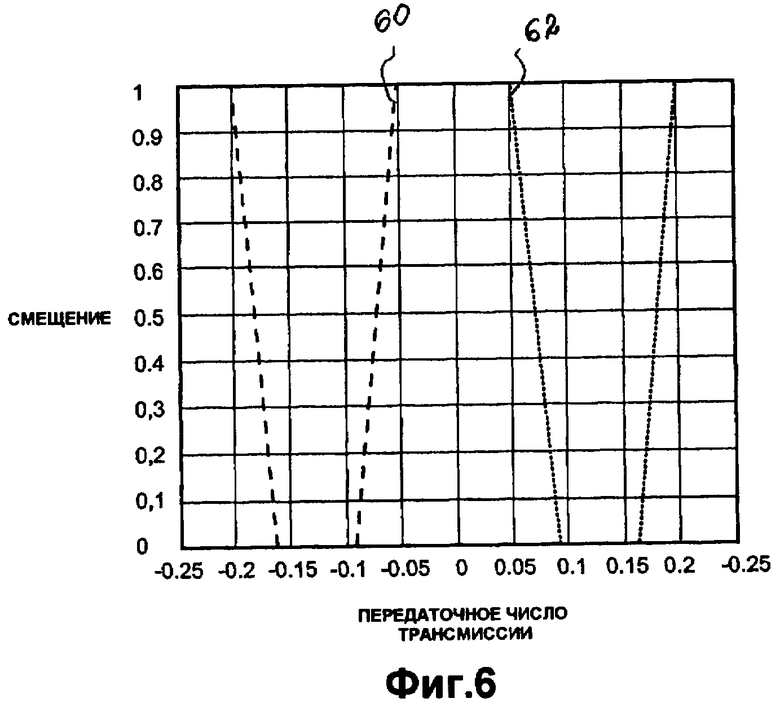
Фиг.6 представляет собой график величины смещения, используемого системой управления согласно настоящему изобретению;
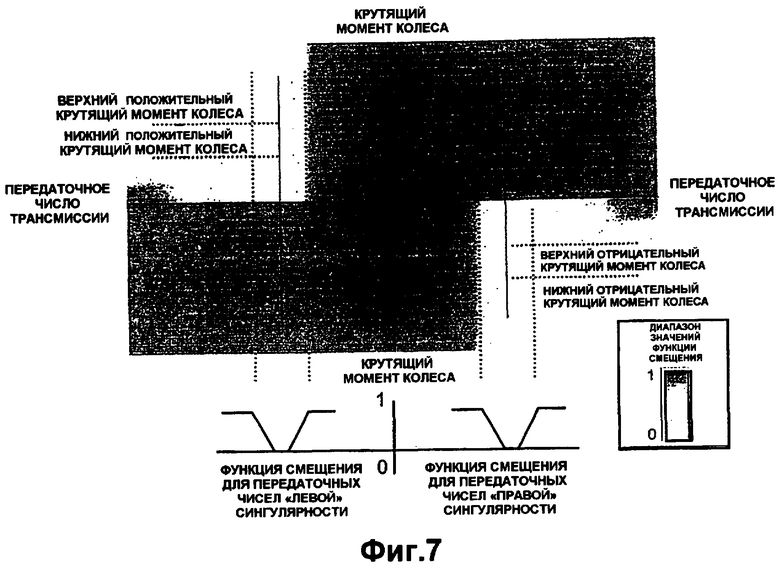
Фиг.7 представляет собой дополнительное графическое представление функции смещения;
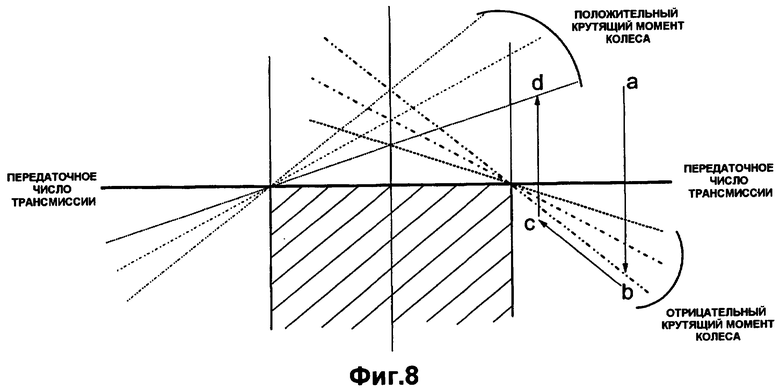
Фиг.8 представляет собой графическое представление переходного события; и
Фиг.9 представляет собой схематическое изображение трансмиссии, работающей в соответствии с настоящим изобретением.
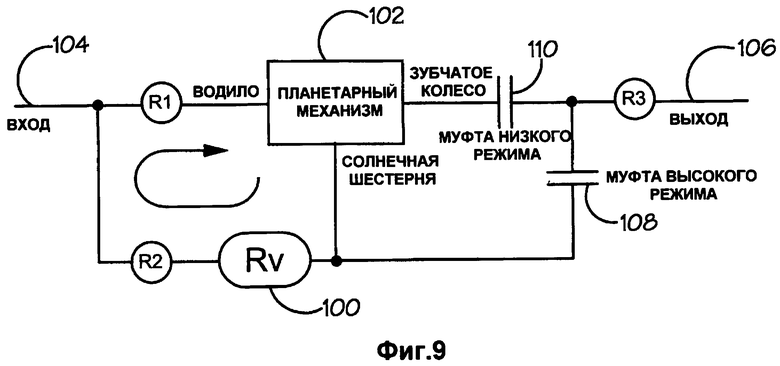
Настоящее изобретение вытекает из анализа поведения трансмиссии на передаточных числах вокруг «нейтрали зубчатой передачи», которое представлено графически на Фиг.1а и Фиг.1b. На обоих графиках вдоль горизонтальной оси отмечено передаточное число вариатора. Оно является функцией, но не тем же самым, обратного передаточного числа трансмиссии. Графики включают в себя не весь диапазон передаточных чисел, доступных от вариатора, но только небольшой диапазон с обеих сторон передаточного числа «нейтрали зубчатой передачи», которое в данном примере равно -1,7. Это передаточное число вариатора, которое приводит к бесконечному уменьшению скорости в трансмиссии в целом, т.е. нулевой скорости на выходе трансмиссии. Точки с правой стороны данного передаточного числа соответствуют движению транспортного средства вперед (передний ход) и точки с левой стороны - движению назад (задний ход). На Фиг.1а по вертикальной оси отображается крутящий момент, выдаваемый трансмиссией на ее входе, т.е. нагружающий (или разгрузочный, в случае отрицательных значений) крутящий момент, прилагаемый к двигателю трансмиссией. На Фиг.1b по вертикальной оси отображается крутящий момент на выходе трансмиссии, т.е. крутящий момент, передаваемый на приводимые в движение колеса моторного транспортного средства. Положительные значения соответствуют прямому крутящему моменту колеса, а отрицательные - обратному. На обоих графиках показаны шесть различных линий, обозначенных от 1 до 6, каждая соответствует различным реактивным крутящим моментам, установленным вариатором. В гидравлически управляемом вариаторе известного типа, который будет описан ниже, данные установленные значения соответствуют соответствующим различным разностям давлений, прилагаемых к приводам вариатора, а соответствующие давления показаны над графиками. Линии 1, 2, 3 отображают прямой крутящий момент колеса (т.е. ситуацию, в которой колеса заставляют транспортное средство перемещаться вперед), тогда как линии 4, 5, 6 отображают обратный крутящий момент колеса. Для сравнения, Фиг.2а и Фиг.2b соответствуют Фиг.1а и Фиг.1b, но показывают идеализированную ситуацию, в которой трансмиссия предполагается имеющей стопроцентный КПД.
На Фиг.2а можно увидеть, что для двигателя с трансмиссией, имеющей идеальный КПД, нагрузка падает до нуля в сингулярности «нейтрали зубчатой передачи», независимо от реактивного крутящего момента, создаваемого вариатором. Сравним это, однако, с поведением реальной трансмиссии, показанным на Фиг.1, которая имеет две отдельные сингулярности с каждой из двух сторон «нейтрали зубчатой передачи»:
«сингулярность движения накатом заднего хода» 8 находится слева от «нейтрали зубчатой передачи» - транспортное средство движется назад - и подвергается прямому крутящему моменту колеса (линии 1, 2, 3). Для всех прямых крутящих моментов колеса (сверх определенного минимума) нагрузка на двигатель (вертикальная ось, Фиг.1а) падает до нуля в этой сингулярности;
«сингулярность движения накатом переднего хода» 10 находится справа от «нейтрали зубчатой передачи» - транспортное средство движется вперед - и подвергается обратному крутящему моменту колеса. Для всех обратных крутящих моментов колеса (опять сверх определенного минимума) нагрузка на двигатель падает до нуля в этой сингулярности.
Разница между Фиг.1 и Фиг.2 вызвана рассеиванием энергии в реальной трансмиссии из-за ее неэффективности - потерь на трение и т.д. Входной (нагружающий) крутящий момент упадет до нуля тогда, когда данные потери на трение будут сбалансированы с энергией, получаемой трансмиссией через ее выход. В результате сингулярности могут испытываться только при условии «движения накатом», - т.е. когда направление крутящего момента колеса, прилагаемого трансмиссией, противоположно направлению вращения колес.
Рассмотрим в качестве примера линию 1, которая отображает условие прямого крутящего момента колеса (Фиг.1b). Предположим, что транспортное средство первоначально находится в состоянии, отмеченном точкой Х. Оно движется вперед (передаточное число вариатора находится справа от «нейтрали зубчатой передачи»); крутящий момент колеса является прямым (см. Фиг.1b) и двигатель нагружен и, таким образом, к нему должно быть подано топливо, чтобы поддержать его скорость. Предположим также, что несмотря на прямой крутящий момент колеса транспортное средство замедляется, например, из-за того, что оно поднимается на крутой холм. Если скорость двигателя поддерживается, в то время как транспортное средство замедляется, передаточное число должно упасть, так что рабочая точка перемещается влево на графике. В точке Y транспортное средство достигает точки остановки и далее начинает откатываться назад вниз с холма. Трансмиссия, таким образом, переключается на задний ход. Идеализированный анализ, представленный на Фиг.2а, показывает, что как только транспортное средство начинает откатываться назад, двигатель начинает постепенно разгружаться. Однако на практике (Фиг.1а) переход от нагружения к разгружению двигателя не происходит до тех пор, пока транспортное средство не начало двигаться назад и передаточное число не упало вслед за этим до сингулярности 8 движения накатом заднего хода. В точке Z, слева от сингулярности, двигатель постепенно разгружается.
Сингулярность 8 движения накатом заднего хода может также испытываться в ситуации, когда транспортное средство изначально едет назад (точка Z), но водитель запрашивает прямой крутящий момент колеса. Это происходит, например, в том случае, когда водитель сначала задает задний ход транспортного средства, а затем перемещает средство управления движением в положение «вперед», в то время как транспортное средство находится в движении, что обозначается здесь как «движение назад-вперед». В трансмиссии с «нейтралью зубчатой передачи» требуемый прямой крутящий момент колеса обеспечивается во время движения назад путем прекращения подачи топлива на двигатель и его разгрузки. Транспортное средство ускоряется по направлению вперед (т.е. замедляется по направлению к «нейтрали зубчатой передачи»), что может привести к тому, что будет достигнуто условие сингулярности. Это произойдет до того, как передаточное число достигнет «нейтрали зубчатой передачи».
Сингулярность движения накатом переднего хода может быть аналогичным образом достигнута с другого направления, но снова всегда при условии «движения накатом». Предположим, например, что транспортное средство первоначально неподвижно или движется назад и обращено передней стороной вниз от вершины холма, в результате чего оно ускоряется по направлению вперед, несмотря на обратный крутящий момент колеса. Соответствующие линии обозначены номерами 4, 5 и 6 на Фиг.1, и сингулярность движения накатом переднего хода в данной ситуации достигается слева. Переключение на движение назад, в то время как транспортное средство движется вперед, заставило бы силовую передачу достигать той же сингулярности справа на графике.
Чтобы пояснить значение сингулярностей, необходимо, прежде всего, рассмотреть конкретные задачи, с которыми сталкиваются при регулировке трансмиссии с регулируемым крутящим моментом, даже на передаточных числах, удаленных от сингулярностей. Для этого на Фиг.3 и Фиг.4 очень схематично показаны соответственно вариатор, подходящий для использования в осуществлении настоящего изобретения, и силовая передача, включающая в себя этот вариатор. Устройства, показанные на данных чертежах, сами по себе не является новыми. Более подробную конструкцию и работу вариатора и силовой передачи можно найти в патентах фирмы Torotrak (Development) Ltd и в частности в европейском патенте №0444086.
Вариатор 11 на этих чертежах представляет собой вариатор с роликовым зацеплением в тороидальной дорожке, хотя настоящее изобретение не ограничено вариаторами данной конструкции. Ролик 12 (который был бы в реальном вариаторе одним из ряда роликов) движется по двум дорожкам 14, 16 и служит для передачи движения между ними. Ролик может изменять свой угол относительно общей оси 18 дорожек путем прецессирования вокруг оси 20 прецессии. Он также подвергается действию регулируемой силы, имеющей компонент F вдоль окружности, через гидравлический исполнительный механизм 22 и может перемещаться вперед и назад вдоль окружности. Изменения передаточного числа включают в себя перемещение ролика назад или вперед вдоль этой окружности, в результате чего дорожки 14, 16 прикладывают к нему направляющий момент, заставляя его прецессировать, таким образом изменять относительные радиусы траекторий ролика по дорожкам, делая возможным изменение передаточного числа. Сила F равна и противоположна по направлению сумме сил f1+f2, прилагаемых дорожками к ролику. Кроме того, сумма f1+f2 пропорциональна сумме крутящих моментов Tin и Tout, прикладываемых роликом 12 к соответствующим дорожкам 14, 16. Следовательно, сумма Tin + Tout, называемая здесь реактивный крутящий момент вариатора, всегда пропорциональна силе F исполнительного механизма. Путем управления силой исполнительного механизма осуществляется прямое управление реактивным моментом.
Согласно этому принципу через вариатор выбирается и устанавливается не передаточное число вариатора, а реактивный крутящий момент. В этом отношении рассматриваемая силовая передача полностью отличается от обычной. Большая часть трансмиссий сконструированы так, что они получают входное указание (в гидравлической, электрической или какой-либо другой форме) требуемого передаточного числа, и они выбирают передаточное число, которое является функцией сигнала. Дело обстоит не так в вариаторе и трансмиссии «с регулируемым крутящим моментом», рассматриваемых здесь. Вместо этого вариатор устанавливает требуемый реактивный крутящий момент и его передаточное число автоматически изменяется, чтобы обеспечить изменения в двигателе и скорости транспортного средства.
Фиг.4 предназначена для пояснения этого аспекта работы трансмиссии. Блок Е отображает суммарный момент инерции Je на входе вариатора, таким образом включает в себя моменты инерции вращающихся элементов двигателя, зубчатого механизма, связывающего двигатель с вариатором, дорожки 14 и т.д. Данный блок показан (на данном очень стилизованном чертеже) связанным непосредственно с дорожкой 14 вариатора 11. В реальности, конечно, имеется промежуточный зубчатый механизм, который в некоторых вариантах осуществления включает в себя шунтирующий планетарный механизм. Следующий блок V отображает суммарный момент инерции Jv на выходе вариатора, таким образом включает в себя моменты инерции расположенных после вариатора элементов - приводного вала, дифференциала, ведомых колес и т.д. и также инерцию самого транспортного средства. На стороне вариатора, обращенной к двигателю, эффективный крутящий момент, доступный для ускорения момента инерции Je, является суммой крутящего момента Te двигателя и нагружающего крутящего момента Tin, прилагаемого к дорожке 14 роликом вариатора. При балансе данных крутящих моментов, т.е. когда они равны и противоположно направлены, скорость двигателя постоянна. При их неравенстве возникает ненулевой эффективный крутящий момент, действующий на момент инерции Je, далее на ускорение двигателя. Ролик вариатора автоматически перемещается и прецессирует, чтобы обеспечить последующее требуемое изменение передаточного числа трансмиссии. Очевидно, что для того, чтобы управлять скоростью двигателя, необходимо динамическим образом управлять балансом между крутящим моментом Te двигателя и нагружающим крутящим моментом Tin, прикладываемым к двигателю трансмиссией.
На стороне вариатора, обращенной к транспортному средству/выходу, эффективный крутящий момент, доступный для ускорения момента инерции Je, зависит от баланса между (1) крутящим моментом Tout на выходе вариатора и (2) прилагаемыми извне крутящими моментами - от тормозов транспортного средства, колес (вследствие уклона дороги) и т.д. Любой результирующий эффективный крутящий момент доступен для ускорения транспортного средства. Вариатор автоматически обеспечивает последующие требуемые изменения передаточного числа трансмиссии.
Необходимо снова отметить, что Фиг.4 является очень упрощенной и служит только для иллюстрирования некоторых принципов. Основные функциональные элементы реальной трансмиссии представлены на Фиг.9, где вариатор обозначен под позицией 100, а шунтирующий планетарный механизм под позицией 102. Вариатор соединен с одной стороны через зубчатую передачу R2 с входом 104 трансмиссии и таким образом с двигателем, а с другой стороны - к солнечной шестерне шунтирующего планетарного механизма 102. Водило шунтирующего планетарного механизма также соединено с входным валом 104 трансмиссии через зубчатую передачу R1. В результате сформирован контур рециркуляции энергии, содержащий вариатор и шунтирующий планетарный механизм, что понятно специалистам в данной области техники, которая обозначена на чертеже изогнутой стрелкой. Соединение с выходным валом 106 трансмиссии может быть осуществлено по любому из двух путей. Путем сцепления муфты 108 высокого режима и расцепления муфты 110 низкого режима создается приводной путь от входа трансмиссии через зубчатую передачу R2, вариатор 100 и зубчатую передачу R3 к выходу трансмиссии. Шунтирующий планетарный механизм в результате обходится стороной. Высокий режим используется, чтобы получить более высокие обратные передаточные числа трансмиссии переднего хода без «нейтрали зубчатой передачи». Чтобы получить более низкие передаточные числа, муфта 110 низкого режима сцепляется и муфта 108 высокого режима расцепляется, так что привод на выход 106 трансмиссии передается от зубчатого колеса шунтирующего планетарного механизма 102. Низкий режим обеспечивает «нейтраль зубчатой передачи». Рассматриваемые здесь проблемы возникают только в низком режиме.
Требуется система управления, обычно реализованная электронным образом, которая обеспечивает крутящий момент, запрашиваемый от двигателя, и реактивный момент, запрашиваемый от вариатора согласованным образом, для того чтобы (1) управлять динамическим балансом на границе двигатель/трансмиссия для изменения скорости двигателя и крутящего момента при необходимости, при этом в то же время (2) обеспечивая крутящий момент на выходе силовой передачи - ведомых колесах транспортного средства, который адекватно отражает требование водителя. Это выполняется путем управления двумя переменными - запросом крутящего момента двигателя и запросом реактивного крутящего момента вариатора. Конкретные проблемы, относящиеся к управлению двигателем, будут рассмотрены первыми, перед описанием подходящей системы управления.
Во время «движения накатом», при обратных передаточных числах трансмиссии, удаленных от сингулярностей, энергия идет от колес через трансмиссию к двигателю, где она рассеивается путем трения. Скорость двигателя поддерживается действием трансмиссии. Поэтому подача топлива к двигателю (нулевой прилагаемый запрос крутящего момента) может быть прекращена. Точка Z на Фиг.1а отображает такое условие. Однако при передаточном числе, приближающемся к сингулярности 8, крутящий момент на входе трансмиссии падает до нуля. Достигается точка, где скорость двигателя не может поддерживаться одной только трансмиссией, и в более ранних прототипах это приводило к тому, что скорость двигателя падает соответственно результирующему «ненадлежащему поведению» силовой передачи. Кроме того, при передаточных числах между сингулярностями энергия всегда идет от двигателя к трансмиссии, даже при «движении накатом». Следовательно, скорость двигателя не может быть поддержана крутящим моментом от трансмиссии/колес. Вместо этого к двигателю должно быть подано топливо (на основании положительного запроса крутящего момента), если необходимо поддержать его скорость. Следовательно, в системе, которая будет описана ниже, когда скорость двигателя должна быть поддержана, запрос крутящего момента к двигателю является всегда положительным для передаточных чисел между двумя сингулярностями.
Следует отметить, что, тем не менее, могут быть условия, когда скорость двигателя на входе в соответствующий диапазон передаточных чисел бывает чрезмерной и необходимо уменьшить скорость двигателя. В этом случае подача топлива к двигателю может быть прекращена, даже при передаточных числах между сингулярностями.
В трансмиссии с управляемым крутящим моментом скорость двигателя будет постоянной, если крутящий момент двигателя равен нагрузке, приложенной к двигателю трансмиссией. Фиг.1а представляет собой график последней величины. Рассмотрим диапазон передаточных чисел вариатора от сингулярности 8 движения накатом заднего хода до «нейтрали зубчатой передачи». Прямой крутящий момент колеса (линии 1, 2 и 3) создает условие «движения накатом». График демонстрирует, что нагрузка двигателя действительно увеличивается с увеличением крутящего момента «движения накатом». Это противоположно обычной ситуации, при передаточных числах удаленных от сингулярностей, где увеличение крутящего момента «движения накатом» будет увеличивать разгрузку двигателя. Объяснение состоит в том, что увеличенный крутящий момент «движения накатом» создает увеличенную рециркуляцию энергии в трансмиссии (см.Фиг.9, на которой показан контур, в котором происходит рециркуляция энергии), и в результате потери энергии из-за неэффективности вариатора также увеличиваются, перевешивая увеличение на входе энергии от колес.
Настоящая система поэтому увеличивает запрос крутящего момента двигателя в ответ на увеличение крутящего момента «движения накатом», когда передаточное число находится между двумя сингулярностями.
Кроме того, должна быть учтена задержка по времени между изменением в подаче топлива в двигатель и соответствующим изменением выходного крутящего момента двигателя. Если подача топлива в двигатель была начата после прохождения через сингулярность, то из-за задержки по времени нагружение двигателя будет начато прежде, чем крутящий момент двигателя будет доступен, чтобы поддержать скорость двигателя. Решение состоит в увеличении подачи топлива в двигатель при приближении к сингулярности и до того, как начнется нагружение двигателя. Система ожидает достижения и прохождения через сингулярность передаточного числа и подготавливает двигатель, путем предварительной подачи топлива к нему, чтобы создать крутящий момент, необходимый для поддержания его собственного вращения.
Обращаясь теперь к другой управляемой переменной, реактивному крутящему моменту, имеются, по существу, два различных способа вычисления реактивного крутящего момента, который будет запрошен от вариатора, обозначаемые как алгоритм А и В:
А. Запрос реактивного крутящего момента может быть вычислен из требуемого крутящего момента на входе вариатора, учитывая текущее передаточное число вариатора; или
В. Запрос реактивного крутящего момента может быть вычислен из требуемого крутящего момента на выходе вариатора, опять учитывая текущее передаточное число вариатора.
Алгоритм А является более подходящим в общем случае, так как он облегчает обеспечение вышеупомянутого динамического баланса крутящих моментов двигателя/трансмиссии. Реализация такого алгоритма не будет описана здесь подробно. Подробное описание можно посмотреть в заявке на патент PCT/GB 04/03293 на имя Torotrak′s International. Подводя итог, одна из реализаций такого алгоритма включает в себя:
1. Выбор на основании ввода водителем (обычно через акселератор) требуемой величины скорости двигателя и крутящего момента двигателя;
2. Установку запроса крутящего момента, прикладываемого к двигателю, как суммы (i) требуемого крутящего момента двигателя и (ii) величины корректировки крутящего момента, необходимой для ускорения момента инерции Je со стороны двигателя по направлению к требуемой скорости двигателя;
3. Вычисление мгновенного ожидаемого выходного крутящего момента двигателя в ответ на запрос крутящего момента (так как в условиях динамики реальный крутящий момент двигателя отстает от запроса) и
4. Установку реактивного крутящего момента вариатора такого, что крутящий момент, выдаваемый вариатором на его входе, равен вычисленному выходному крутящему моменту двигателя, уменьшенному на величину корректировки крутящего момента.
Реальная система также включает в себя коррекцию по принципу обратной связи скорости двигателя, основанную на прогнозе ускорения двигателя. Данный прогноз получается путем вычитания нагрузки, приложенной к двигателю (вычисленной из реактивного крутящего момента вариатора, используя модель трансмиссии) из ожидаемого мгновенного выходного крутящего момента. Это дает эффективный крутящий момент, действующий на момент инерции на стороне двигателя (Je, Фиг.4), так что ускорение двигателя может затем быть найдено при помощи законов Ньютона.
Однако алгоритм А не работает, когда трансмиссия приближается к сингулярностям. В сингулярности вариатор выдает нулевой крутящий момент на его входе, независимо от установки реактивного крутящего момента. В этих условиях вычисление на этапе 4 включает в себя деление на ноль. При передаточных числах, близких к сингулярности, погрешности увеличиваются, и вычисление реактивного крутящего момента таким способом может привести в результате к созданию крутящего момента на ведомых колесах, который недопустимо отклоняется от ожидаемого водителем и который подвергается действию недопустимой осцилляции.
Вспомним, что сингулярности испытываются только в условиях «движения накатом». В окрестностях сингулярностей, вследствие того, что передаточное число трансмиссии является низким, крутящий момент, прилагаемый к двигателю трансмиссией, является относительно малым. Кроме того, сингулярности имеют место в условиях («движение вперед-назад», подъем/спуск на холм), в которых некоторая «вспышка» в двигателе может быть использована для того, чтобы водитель обеспечил требуемый крутящий момент «движения накатом». Эти факторы делают подходящим в данном случае алгоритм В. Реактивный крутящий момент может быть основан непосредственно на запросе водителем крутящего момента колеса, передаваемого через акселератор и средства управления приводом.
Тогда необходима определенная методика для выбора, какой из двух алгоритмов должен быть использован в любой данный момент. Со ссылкой на Фиг.1, отметим, что с обеих сторон передаточного числа сингулярности вход или нагружен, или разгружен, в зависимости от направления передаточного числа трансмиссии. Система управления использует это знание для определения, по какому алгоритму будет определен запрос реактивного крутящего момента. Если двигатель должен быть разгружен, не требуется никакой компенсации для его динамического ответа и может быть применен алгоритм В. На Фиг.5 на горизонтальной оси показано передаточное число трансмиссии и на вертикальной оси выходной крутящий момент трансмиссии (крутящий момент колеса). В темной области, называемой областью нормального движения, двигатель является нагруженным. В светлых областях двигатель является ненагруженным.
Система управления использует функцию смещения, значение которой изменяется от нуля (выбирается алгоритм В) до 1 (выбирается алгоритм А), как показано в ключе легенды. Функция смещения должна учитывать и передаточное число трансмиссии, и сигнал запроса водителем крутящего момента колеса. На Фиг.6 показаны изменения величины смещения (вертикальная ось) от передаточного числа (горизонтальная ось), и содержатся две линии 60 и 62, первая применяется, когда требуемый крутящий момент колеса является положительным, и вторая, когда он является отрицательным. Система управления осуществляет тест сигнала запроса крутящего момента колеса, чтобы определить, какая линия соответствует условиям работы. Форма функции смещения обеспечивает постепенное переключение алгоритма управления при приближении к сингулярности. Отметим, что переключение на алгоритм В происходит перед тем, как передаточное число достигнет сингулярности.
Переключение алгоритма управления может также быть вызвано путем изменения требования к крутящему момента колеса водителем, т.е. путем перемещения рабочей точки вдоль оси на Фиг.6. Вдали от передаточных чисел сингулярности, при «движении накатом», существуют разные требования, в зависимости того, что введет водитель. Например, когда водитель поднимает его/ее ногу от педали акселератора, это означает требование определенного (малого) уровня крутящего момента «движения накатом», и в то же время управление скоростью двигателя сохраняется. Однако если водитель осуществляет «движение вперед-назад» путем перевода средства управления движением из положения «передний ход» в положение «задний ход», и транспортное средство одновременно находится в движении, тогда это означает ожидание большего крутящего момента колеса, и управление скоростью двигателя может быть компромиссным, - позволяя скорости двигателя «вспыхнуть», чтобы получить ожидаемый крутящий момент колеса. Следовательно, в первом случае смещение равняется 1 или близко к этому, в то время как при «движении вперед-назад» смещение должно быть равно 0 или низкой величине.
Чтобы учесть эти требования, система управления выбирает верхнюю и нижнюю границы крутящего момента колеса, выше и ниже крутящего момента колеса, запрашиваемого водителем, и использует их, чтобы наложить ограничения на реактивный крутящий момент, тем самым гарантируя, что крутящий момент колеса не отклонится от границ. На Фиг.7 представлен вариант функции смещения, модифицированной так, чтобы учесть вышеуказанное. Границы крутящего момента колеса обозначены «верхняя» и «нижняя», хотя конечно они изменяются в зависимости от запроса водителя.
Реальное определение крутящего момента колеса, запрашиваемого водителем, производится на основании положения средства управления акселератором (педали), обычно также с учетом текущей скорости транспортного средства.
Настоящее изобретение, как было обнаружено на практике, обеспечивает поразительное улучшение управления скоростью транспортного средства вокруг «нейтрали зубчатой передачи» (т.е. на низких скоростях транспортного средства). Как следствие, водителю могут быть предложены новые функции. Например, водителю можно предложить средство установки выбранной (низкой) скорости транспортного средства, например 1 миля/час, которая будет затем удерживаться путем управления трансмиссией, несмотря на пересеченную местность. Выбранная скорость может быть нулевой, в этом случае трансмиссия служит для удержания транспортного средства в неподвижном состоянии. Такие средства особенно полезны для «внедорожных» транспортных средств с четырьмя ведущими колесами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ИСТОЧНИКОМ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ И АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И СООТВЕТСТВУЮЩИЙ СПОСОБ УПРАВЛЕНИЯ | 2016 |
|
RU2722809C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2691504C1 |
| Способ управления приводом электромобиля и устройство для его осуществления | 2018 |
|
RU2709639C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2017 |
|
RU2723009C2 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ | 2007 |
|
RU2425268C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИСТОЧНИКОМ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ И АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И СООТВЕТСТВУЮЩИЙ СПОСОБ УПРАВЛЕНИЯ | 2016 |
|
RU2723012C1 |
| СПОСОБ УПРАВЛЕНИЯ И УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСМИССИОННОГО МЕХАНИЗМА | 2016 |
|
RU2719102C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2646780C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
Изобретение относится к силовой передаче моторного транспортного средства и к способу и системе управления ею. Силовая передача содержит бесступенчатую трансмиссию и двигатель. Трансмиссия содержит поворотный вход трансмиссии, связанный с двигателем, поворотный выход трансмиссии, связанный с колесами транспортного средства, вариатор. Способ включает в себя поддержание скорости двигателя в диапазоне низких обратных передаточных чисел трансмиссии, содержащем «нейтраль зубчатой передачи» и проходящем от нее в обе стороны, путем подачи запроса приводного крутящего момента на двигатель, даже тогда, когда силовая передача работает в условиях «движения накатом». Система управления содержит бесступенчатую трансмиссию и двигатель, вариатор и зубчатую передачу. Вариатор выполнен с возможностью обеспечения требуемого реактивного крутящего момента и автоматического обеспечения изменения в передаточном числе трансмиссии/вариатора. При этом система управления имеет два алгоритма для определения реактивного крутящего момента, требуемого от вариатора - алгоритм по умолчанию и алгоритм для условия сингулярности. Достигается улучшение управления скоростью двигателя. 3 н. и 19 з.п. ф-лы, 11 ил.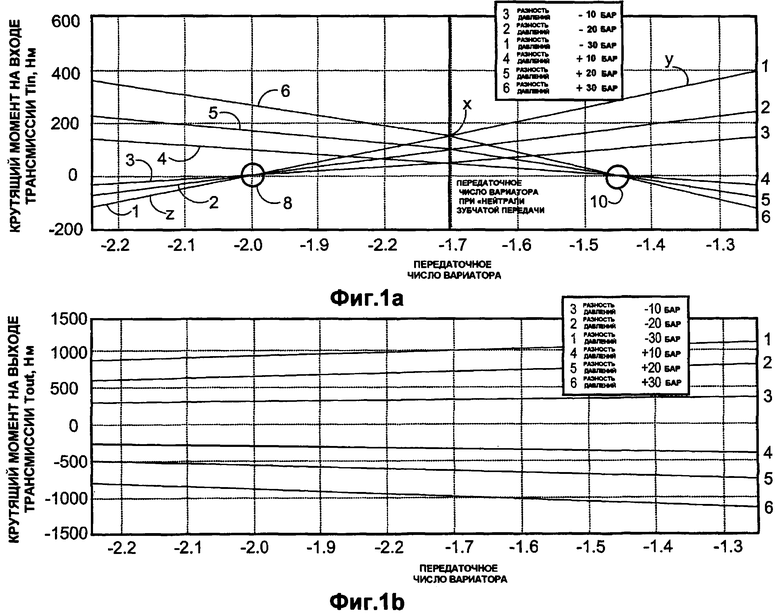
1. Способ управления силовой передачей моторного транспортного средства, содержащей бесступенчатую трансмиссию и двигатель, причем трансмиссия содержит поворотный вход трансмиссии, связанный с двигателем, поворотный выход трансмиссии, связанный с колесами транспортного средства, вариатор, который обеспечивает бесступенчато-регулируемое передаточное число («передаточное число вариатора»), и зубчатую передачу для подсоединения вариатора между входом и выходом трансмиссии таким образом, что передаточное число, определяемое как отношение скорости выхода трансмиссии к скорости входа трансмиссии («обратное передаточное число трансмиссии»), является функцией передаточного числа вариатора, при этом доступный диапазон передаточных чисел вариатора отображается на обоих обратных передаточных числах трансмиссии переднего хода и заднего хода, и при определенном передаточном числе вариатора («передаточное число нейтрали зубчатой передачи») выход трансмиссии является неподвижным, несмотря на то, что он связан через трансмиссию с вращающимся входом трансмиссии, отличающийся тем, что он включает в себя поддержание скорости двигателя в нижнем диапазоне обратных передаточных чисел трансмиссии, содержащем «нейтраль зубчатой передачи» и проходящем от нее в обе стороны, путем подачи запроса приводного крутящего момента на двигатель даже тогда, когда силовая передача работает в условиях «движения накатом».
2. Способ по п.1, в котором указанный приводной крутящий момент является более чем достаточным для преодоления внутренних потерь в двигателе.
3. Способ по п.1, в котором указанный диапазон обратных передаточных чисел трансмиссии простирается, по меньшей мере, от передаточного числа заднего хода, при котором работа в условиях «движения накатом» приводит к нулевой нагрузке, приложенной к двигателю («сингулярность движения накатом заднего хода»), до передаточного числа переднего хода, при котором работа в условиях «движения накатом» приводит к нулевой нагрузке, приложенной к двигателю («сингулярность движения накатом переднего хода»).
4. Способ по п.1, в котором способ дополнительно включает в себя увеличение запроса крутящего момента двигателя при работе в условиях «движения накатом» в указанном диапазоне передаточных чисел в ответ на увеличение крутящего момента «движения накатом» на выходе трансмиссии.
5. Способ по п.1, в котором вариатор является вариатором с регулируемым крутящим моментом.
6. Способ по п.1, который дополнительно включает в себя, при работе в условиях «движения накатом» и когда обратное передаточное число трансмиссии повышается или падает по направлению к нулю, увеличение запроса крутящего момента двигателя до того, как обратное передаточное число трансмиссии пройдет через любую из двух сингулярностей.
7. Силовая передача моторного транспортного средства, содержащая бесступенчатую трансмиссию и двигатель, причем трансмиссия содержит поворотный вход трансмиссии, связанный с двигателем, поворотный выход трансмиссии, связанный с колесами транспортного средства, вариатор, который обеспечивает бесступенчато-регулируемое передаточное число («передаточное число вариатора»), и зубчатую передачу для подсоединения вариатора между входом и выходом трансмиссии таким образом, что передаточное число, определяемое как отношение скорости выхода трансмиссии к скорости входа трансмиссии («обратное передаточное число трансмиссии»), является функцией передаточного числа вариатора, при этом доступный диапазон передаточных чисел вариатора отображается на обоих обратных передаточных числах трансмиссии переднего хода и заднего хода, и при определенном передаточном числе вариатора («передаточное число нейтрали зубчатой передачи») выход трансмиссии является неподвижным, несмотря на то, что он связан через трансмиссию с вращающимся входом трансмиссии, причем силовая передача имеет систему управления, которая может обеспечить поддержание скорости двигателя в нижнем диапазоне обратных передаточных чисел трансмиссии, содержащем «нейтраль зубчатой передачи» и проходящем от нее в обе стороны, путем подачи запроса приводного крутящего момента на двигатель, даже тогда, когда силовая передача работает в условиях «движения накатом».
8. Передача по п.7, в которой указанный приводной крутящий момент является более чем достаточным для преодоления внутренних потерь в двигателе.
9. Передача по п.7 или 8, в которой указанный диапазон обратных передаточных чисел трансмиссии простирается, по меньшей мере, от передаточного числа заднего хода, при котором работа в условиях «движения накатом» приводит к нулевой нагрузке, приложенной к двигателю («сингулярность движения накатом заднего хода»), до передаточного числа переднего хода, при котором работа в условиях «движения накатом» приводит к нулевой нагрузке, приложенной к двигателю («сингулярность движения накатом переднего хода»).
10. Передача по п.7, в которой система управления дополнительно выполнена с возможностью увеличения запроса крутящего момента двигателя при работе в условиях «движения накатом» в указанном диапазоне передаточных чисел в ответ на увеличение крутящего момента «движения накатом» на выходе трансмиссии.
11. Передача по п.7, в которой вариатор является вариатором с регулируемым крутящим моментом.
12. Передача по п.7, в которой система управления дополнительно выполнена с возможностью, при работе в условиях «движения накатом» и когда обратное передаточное число трансмиссии повышается или падает по направлению к нулю, увеличения запроса крутящего момента двигателя до того, как обратное передаточное число трансмиссии пройдет через любую из двух сингулярностей.
13. Система управления для силовой передачи моторного транспортного средства, содержащей бесступенчатую трансмиссию и двигатель, причем трансмиссия содержит поворотный вход трансмиссии, связанный с двигателем, поворотный выход трансмиссии, связанный с колесами транспортного средства, вариатор, который обеспечивает бесступенчато-регулируемое передаточное число («передаточное число вариатора»), и зубчатую передачу для подсоединения вариатора между входом и выходом трансмиссии таким образом, что передаточное число, определяемое как отношение скорости выхода трансмиссии к скорости входа трансмиссии («обратное передаточное число трансмиссии»), является функцией передаточного числа вариатора, при этом доступный диапазон передаточных чисел вариатора отображается на обоих обратных передаточных числах трансмиссии переднего хода и заднего хода, и при определенном передаточном числе вариатора («передаточное число нейтрали зубчатой передачи») выход трансмиссии является неподвижным, несмотря на то, что он связан через трансмиссию с вращающимся входом трансмиссии, причем вариатор является вариатором такого типа, который выполнен с возможностью обеспечения требуемого реактивного крутящего момента и автоматического обеспечения изменения в передаточном числе трансмиссии/вариатора, при этом система управления имеет два алгоритма для определения реактивного крутящего момента, требуемого от вариатора - алгоритм по умолчанию и алгоритм для условия сингулярности, и выполнена с возможностью передачи управления от алгоритма по умолчанию к алгоритму для условия сингулярности, когда передаточное число трансмиссии достигает любой из двух сингулярностей в условиях «движения накатом».
14. Система по п.13, в которой алгоритм по умолчанию включает в себя определение требуемого от вариатора реактивного крутящего момента из требуемой нагрузки двигателя.
15. Система по п.13, в которой алгоритм для условия сингулярности включает в себя определение требуемого от вариатора реактивного крутящего момента из требуемого крутящего момента на выходе трансмиссии.
16. Система по п.13, в которой переключение из алгоритма по умолчанию к алгоритму для условия сингулярности происходит, если передаточное число падает по направлению к сингулярности заднего хода, когда крутящий момент на выходе трансмиссии является прямым.
17. Система по п.13, в которой переключение из алгоритма по умолчанию к алгоритму для условия сингулярности происходит, если передаточное число падает по направлению к сингулярности переднего хода, когда крутящий момент на выходе трансмиссии является обратным.
18. Система по п.13, в которой переключение между алгоритмом по умолчанию и алгоритмом для условия сингулярности происходит между «нейтралью зубчатой передачи» и соответствующей сингулярностью.
19. Система по п.13, в которой переключение между алгоритмами происходит постепенно по диапазону передаточных чисел трансмиссии.
20. Система по п.13, в которой она имеет функцию смещения, основанную на передаточном числе трансмиссии и крутящем моменте на выходе трансмиссии, которая определяет, какой из двух алгоритмов будет использован.
21. Система по п.13, в которой алгоритм по умолчанию используется, по меньше мере, когда силовая передача не работает в условии «движения накатом».
22. Система по п.13, в которой алгоритм для условия сингулярности используется, по меньшей мере, когда передаточное число трансмиссии находится внутри полосы, занимаемой соответствующей сингулярностью.
| WO 2004085190 А1, 10.09.1991 | |||
| US 5047937 А, 10.09.1991 | |||
| Способ определения физико-механических характеристик органического стекла | 1971 |
|
SU444086A1 |
| Автоматическая система управления двигателем и коробкой передач транспортного средства | 1987 |
|
SU1502413A1 |
| Вариационно-реверсивный автомат управления мощностью трансмиссии | 1984 |
|
SU1426867A1 |

